
Abstract
CT reconstruction from incomplete projection data is one of the key researches of X-ray CT imaging. The projection data acquired by few-view and limited-angle sampling are incomplete. In addition, few-view sampling often requires turning on and off the tube voltage, but rapid switching of tube voltage demands for high technical requirements. Limited-angle sampling is easy to realize. However, reconstructed images may encounter obvious artifacts. In this study we investigate a new segmental limited-angle (SLA) sampling strategy, which avoids rapid switching of tube voltage. Thus, the projection data has lower data correlation than limited-angle CT, which is conducive to reconstructing high-quality images. To suppress potential artifacts, we incorporate image structural prior into reconstruction model to present a reconstruction method. The limited-angle CT reconstruction experiments on digital phantoms, real carved cheese and walnut projections are used to test and verify the effectiveness of the proposed method. Several image quality evaluation indices including RMSE, PSNR, and SSIM of the reconstructions in simulation experiments are calculated and listed to show the superiority of our method. The experimental results indicate that the CT image reconstructed using the proposed new method is closer to the reference image. Images from real CT data and their residual images also show that applying the proposed new method can more effectively reduce artifacts and image structures are well preserved.
Keywords
Introduction
Traditional CT system consists of a set of independent X-ray source and detector to emit and detect X-rays respectively. X-ray CT can reconstruct the cross-sectional image of a scanned object, and it has been fully studied and widely used in clinical diagnosis [1, 2], industrial quality inspection [3, 4], transportation safety [5] and other fields. The common data sampling techniques of traditional CT system include full sampling, few-view sampling, limited-angle sampling and so on. Full sampling means X-ray source and detector rotate around the rotation center, and data acquisition system collects projection data within 360 degrees. In this mode, the X-ray source emits X-rays and the detector detects X-ray at each view angle. Thus, the acquired projection data is complete, however, which means a long scanning time or the object is exposed to a large amount of radiation. And X-ray radiation may induce damage [6] or cause cancer [7]. One effective way to reduce the cumulative dose or the scanning time is to reduce the number of projection view angles or sampling angular range.
Few-view sampling means the X-ray source emits X-rays at a certain angular interval β during sampling process, as shown in Fig. 1(a). In this mode, the X-ray source and the detector rotate around the rotation center for one circle like full sampling, but the X-ray source only emits X-ray when it reaches a specific position. This mode can reduce the cumulative dose by reducing the number of projection view angles. Few-view sampling needs to turn on and off the tube voltage frequently in medical CT [8, 9]. However, rapid switching of tube voltage is difficult to realize because of high technical requirements. In limited-angle sampling mode, the X-ray source and detector rotate around the rotation center only within a certain angular range α that is usually less than 180 degrees, as shown in Fig. 1(b). This mode can reduce the cumulative dose or the scanning time by reducing the sampling range. In practical CT imaging, limited-angle sampling can be easily realized and makes no requirement for hardware modification to CT system. The corresponding reconstruction problem is well-known to be highly ill-conditioned, however, because the projection data is heavily incomplete [10–14]. Besides, reconstructed CT images often encounter obvious artifacts.
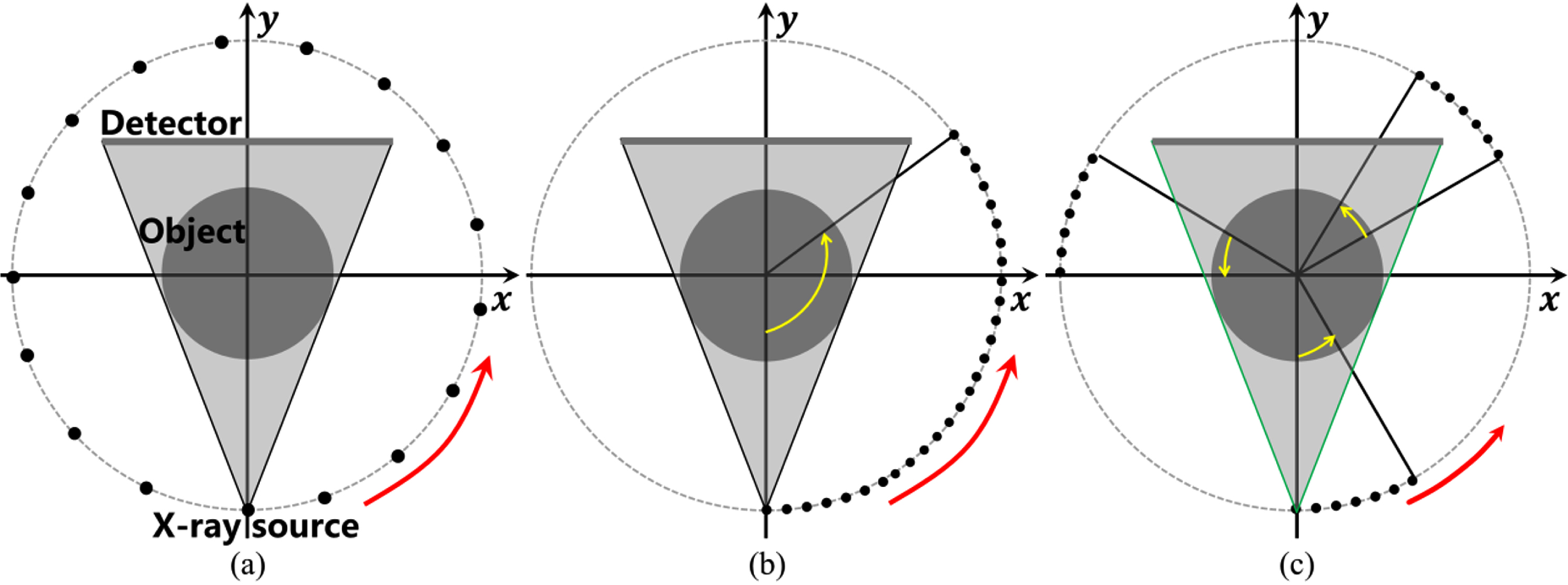
Typical CT sampling modes: (a) few-view sampling, (b) limited-angle sampling, (c) SLA sampling.
It is worth noting that when X-ray source and detector rotate at a high speed, turning on and off the tube voltage at low frequency will lead to segmental limited-angle (SLA) sampling, as shown in Fig. 1(c). In this mode, the X-ray source and detector still rotate around the object like few-view sampling mode. Turning on and off the tube voltage at low frequency means that when the tube voltage is turned on at a certain view angle, it is kept at a constant value for a time period before it is turned off. In another word, SLA sampling does not require rapid switching of the tube voltage. Repeat the above operation until the X-ray source rotate around the rotation center for one circle. Since SLA sampling involves several limited-angle samplings, it only needs to turn on and off the tube voltage a few times. When the voltage is off, CT system cannot collect projection data, so the acquired projection data is incomplete. Specifically, the projection view angles are divided into several clusters and distributed in the range of 360 degrees. The projection data under each cluster is limited-angle CT data. But SLA CT data is different from ordinary limited-angle CT data that are concentrated in a limited angular range. In some other applications, the acquired projection data show similar characteristics with SLA CT data. For example, in CT systems with multiple X-ray source/detector pairs, when each pair of X-ray source/detector rotates a small angular range, the collected projection data is aggregated into several beams and is incomplete [15, 16]. However, this configuration limits the size of the field of view, which is only used for interior tomography and it increases the economic cost. Besides, SLA sampling has been used in multienergy CT reconstruction [17, 18]. In this case, under each energy acquisition, the projection data is restricted in a limited angular range. To remove potential shading artifacts, the structural information of a prior image is incorporated into reconstruction model [19]. In this case, complete structural information of the object can be obtained, although it may be contaminated by motion artifacts or shading artifacts.
As far as we know, we cannot easily acquire the complete structural information of the object in SLA CT. In spite of that, compared to limited-angle CT reconstruction, SLA sampling actually reduces the difficulty of image reconstruction [8, 9]. However, the images reconstructed by simultaneous algebraic reconstruction technique (SART) still suffer from obvious artifacts. In this work, we aim to reduce the artifacts by exploring structural prior of CT images. Classical reconstruction method based on total variation (TV) assumes that the target image is piecewise constant, which has been used in some CT applications and shown good performance [20–23]. However, it cannot effectively suppress shading artifacts in limited-angle CT [11, 24]. Since SLA sampling involves several limited-angle samples, the artifacts of SLA CT images like those of limited-angle CT images. As shown in Fig. 2, the artifacts change slowly like the shadow of the object, we call them shading artifacts for short. In fact, TV-based method used in SLA CT reconstruction can reduce the shading artifacts, but some residual artifacts remain [9]. In our previous work on SLA CT reconstruction, we define multi-direction total variation (MDTV) based on the direction information of the shading artifacts [9]. MDTV method can reduce artifacts, but CT image quality can be further improved. As we know, image gradient magnitude can be treated as adaptive weights to recover image structure. Following this idea, weighted anisotropic total variation (wATV) [25] is used for SLA CT reconstruction. Recently, methods based on image gradient L0 (GradL0) are proposed to reduce the shading artifacts [11, 27]. Minimizing GradL0 does not penalize pixels with large gradient magnitude, but tends to penalize pixels with small gradient magnitude [28]. The shading artifacts change slowly, which often produce small gradient magnitudes. Therefore, minimizing GradL0 can suppress the shading artifacts, however, it seems not so effective to determine the importance of image structures [29], so some image structure may not be well recovered.
In MLCT, intermittently reducing the number of segments can realize SLA sampling. This combination can reduce scanning time and reduce the load of X-ray tube and to improve the throughput of CT system.
In order to eliminate the potential disadvantages of the above reconstruction methods, a new reconstruction method is presented for SLA CT reconstruction. We incorporate image structure prior into reconstruction model to guide structure recovery and to reduce artifacts. In this work, we use relative total variation (RTV) [30] to regularize SLA CT reconstruction, and call it RTV method for short. RTV term has been widely applied to other reconstruction applications because of its capability of extracting image structures [19, 31]. Different form the adaptive weights in wATV term, local statistics information of image gradients is used to refine structure prior so that RTV term meets our requirements for adaptive weights. The mentioned statistics information can be stated as follows, partial derivatives generated by structures often show the same direction, while those generated by noise often show different directions; besides, the pixel values of shading artifacts change slowly, while pixel values of image structures often change sharply. Based on this observation, RTV term can distinguish image structures from the shading artifacts. Then, we use a two-step algorithm to solve the RTV-regularized reconstruction model. Experimental results are reported to show the effectiveness of the presented method.
In the remainder of this article, we first introduce SLA sampling, related reconstruction methods, and present our method in Section II. We report simulation experiments and real CT data experiments in Section III. And finally, we conclude and report some discussions in Section IV.
Brief introduction of SLA CT
In addition to reducing tube voltage or tube current, multiple ways can be used to reduce X-ray radiation dose, such as few-view sampling and limited-angle sampling. Few-view sampling requires frequently turning on and off the tube voltage, which demands for high technical requirements and hinders the wide application of this strategy [9]. Reducing X-ray pulse frequency can acquire few-view projection data, which, however, only acquire limited photon quantity in the environment of a rapidly rotating CT gantry. Limited-angle sampling is easy to realize, however, the reconstructed images often encounter obvious artifacts that are difficult to remove [10, 24]. In addition, a multi-slit collimator can block some X-rays from passing through patients, which can be used in traditional CT based on circular scan trajectory [32] and spiral CT [33] to reduce radiation dose. However, motion patterns and positions of the multi-slit collimator need to be optimized carefully. And this strategy requires hardware modification to CT system. To the best of our knowledge, in medical CT, a practical under-sampling scheme has not been demonstrated in the challenging environment of a rapidly rotating CT gantry. In industrial CT, reducing X-ray radiation dose is not an urgent matter, but reducing scanning time or improving CT system throughput may be an important research topic. Reducing the turntable speed can be used to achieve few-view projection data, but it needs a long time. Thus, a practical under-sampling method is also necessary for industrial CT.
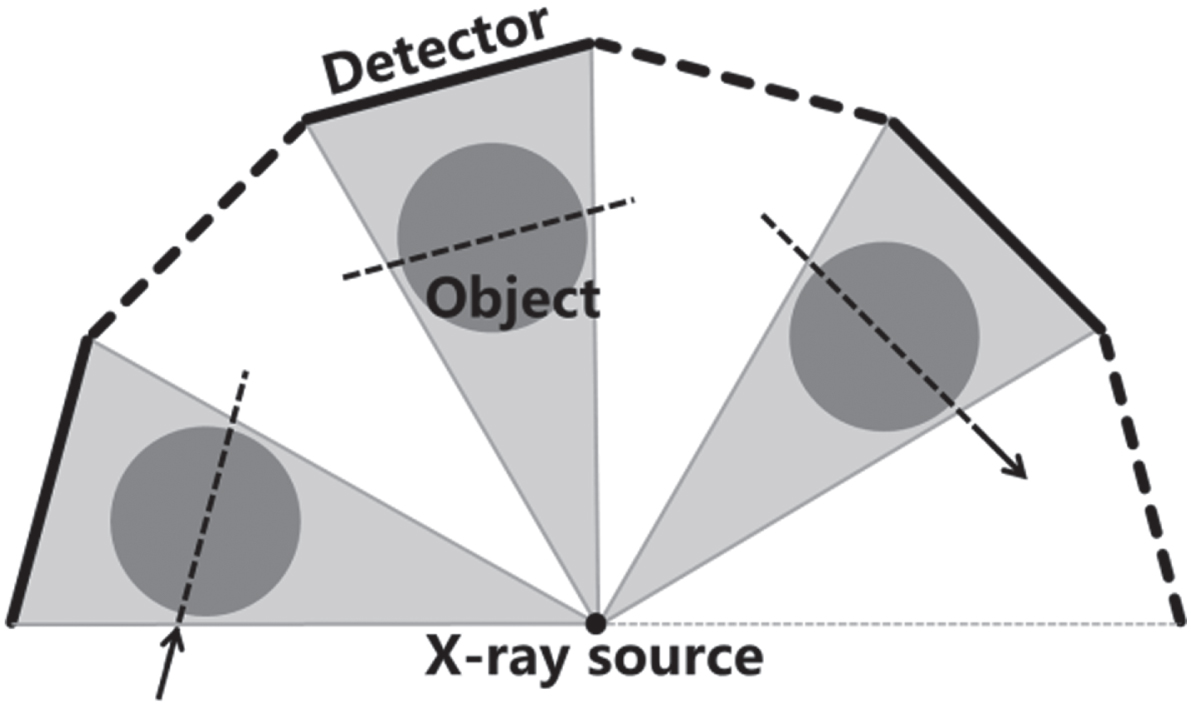
SLA sampling may be an appropriate choice, which can avoid rapid switching of tube voltage, and the acquired CT data has lower data correlation than limited-angle CT [9], so it is conducive to reconstructing high-quality images. Realizing SLA sampling only needs to turn on and off the tube voltage a few times in medical CT, which reduces technical difficulty. In industrial CT, multisegment straight-line CT (MLCT) [34–37] scanning has been proposed to be a practical method. For example, in industrial online detection and safety inspection for baggage, MLCT may be a choice. Intermittently reducing the number of segments in MLCT can realize SLA sampling, as shown in Fig. 3. This combination reduces scanning time and the load of X-ray tube to improve the throughput of CT system. In a word, SLA sampling has the potential to be a practical under-sampling scheme in medical and industrial CT applications.
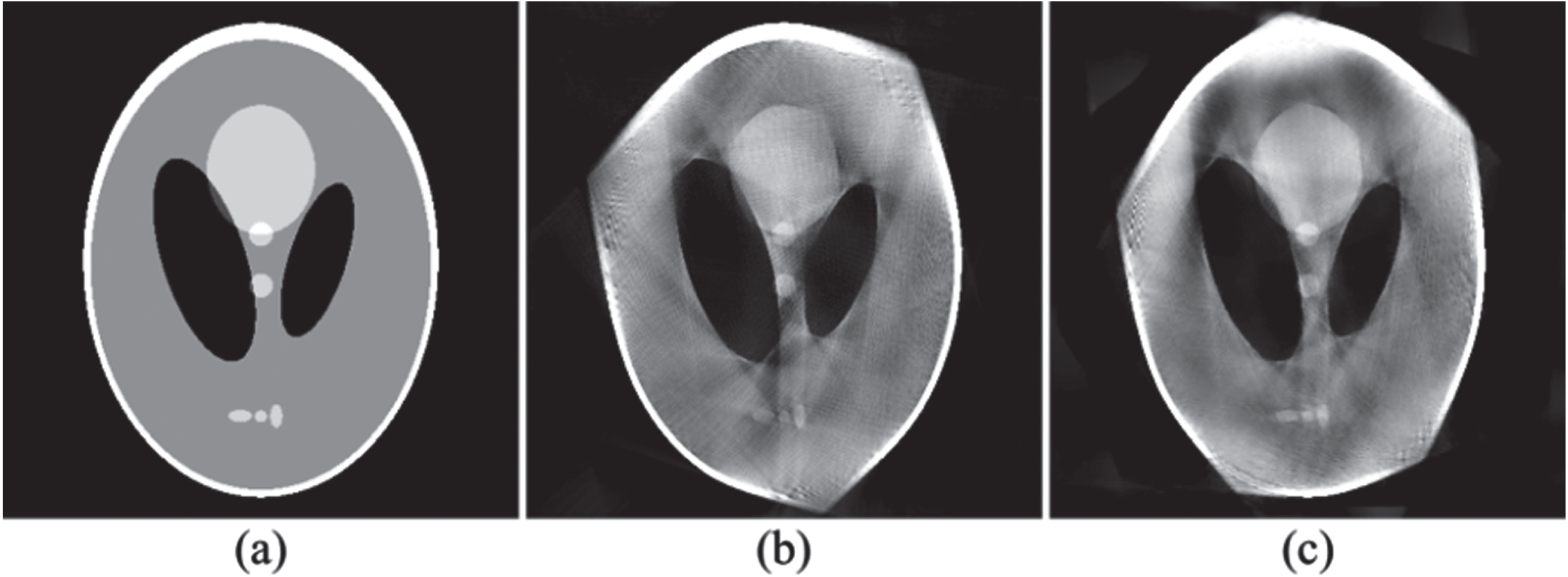
The shading artifacts distribution in SLA CT, (a) Shepp-Logan phantom, (b) image with shading artifacts distributed in 3 directions, (c) image with shading artifacts distributed in 5 directions.
Total variation (TV) -based reconstruction model can be expressed as follows,
f
TV of image f with size of N × 1 is defined as the L1 norm of image gradient magnitude [21, 22],
In our previous work on SLA CT reconstruction [9], we use directional total variation (DTV) to define MDTV as follows,
f
α,TV is the DTV, it is defined as,
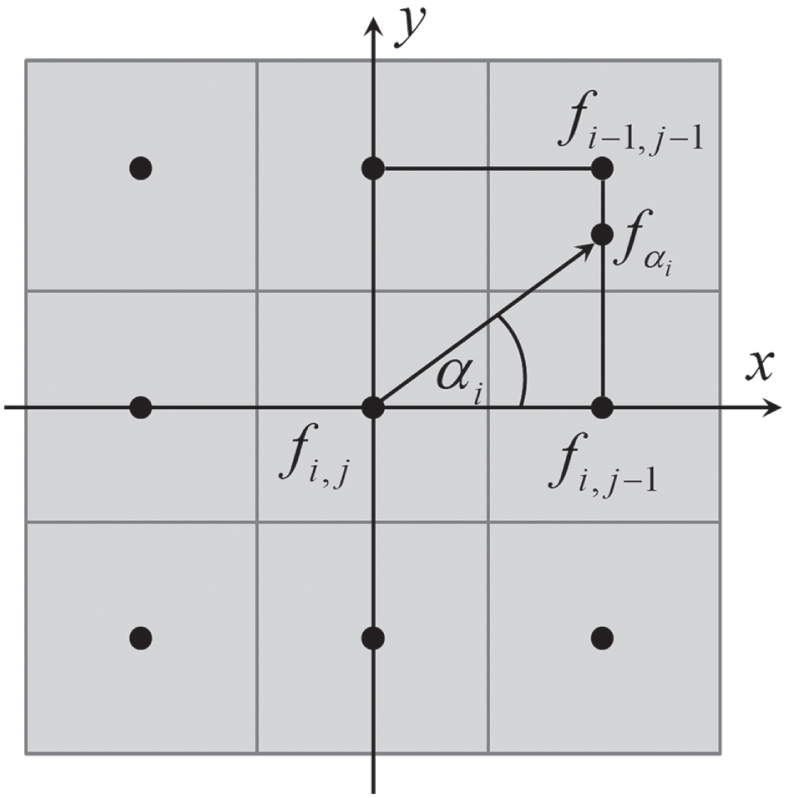
Diagram of the directional difference calculation (0 ⩽ α i ⩽ π/ - 4).
In addition to structural information, one can use image gradient information to determine the penalty intensity for current gradient magnitude. Following this idea, weighted anisotropic total variation (wATV) is defined as follows,
It should be noted that weights 1/(|∂ x f) n | + τ and 1/(| (∂ y f) n | + τ) vary with pixel positions, where τ is a small constant. When the weights are generated by potential prior or reference image, that is to say, they are fixed, wATV becomes traditional weighted anisotropic total variation [25, 38]. In this work, we still call this term in (4) wATV term for convenience. The adaptive weights reduce the dependence of wATV on gradient magnitudes, so it is closer to L0 norm than TV norm [29]. Physically, wATV based method is to minimize weighted gradient magnitudes. Minimizing wATV tends to reconstruct piecewise constant images. In SLA CT, gradient magnitudes generated by artifacts or noise are often small, that is, | (∂ x f) n | and | (∂ y f) n | are small, so their reciprocals 1/(| (∂ x f) n | + τ) and 1/(| (∂ y f) n | + τ) are large. Image structures often mean sharp changes in pixel values, that is, gradient magnitudes are often large, so their weights are small. Minimizing wATV is propitious to suppressing artifacts and noise and retaining structure information. To solve reconstruction model regularized by wATV, we pre-compute the adaptive weights using reconstructed image at previous step, and then minimize wATV using gradient descent algorithm. For short, we call this method wATV method.
Image gradient L0 (GradL0) is defined as follows [28],
c · f
GradL0 ≠ c ·
f
GraL0, which is often used to measure image sparsity. GradL0 term does not rely on gradient magnitude information, so minimizing GradL0 does not penalize pixels with large gradient magnitude but tends to penalize pixels with small gradient magnitude. The shading artifacts often produce small gradient magnitudes, so they are expected to be suppressed by GradL0 minimization. In order to solve GradL0-regularized reconstruction model, we refer the algorithm used in Ref. [11]. For short, we call it GradL0 method.
In SLA CT reconstruction, we endeavor to reduce artifacts and preserve image structures. Following the strategy used in wATV, we must be concerned with that whether the weights are reliable due to the negative impact of artifacts and noise. In order to release the impact, we use relative total variation (RTV) to extract reliable structure prior. RTV of image f is defined as follows [30],
TV is defined as the L1 norm of the image gradient. All noise, artifact, and structure pixels increase TV value, which show that the TV responds to the pixel value changes. The numerator term in equation (5) can be viewed as weighted TV because of weighting function hm,n. According to its definition, we know WTV is also responsive to the pixel value changes. Both WTV and WIV are calculated via absolute value operation and weighted summation operation but calculated in reverse order. A key observation is that partial derivatives generated by structures often show the same direction, while those generated by noise often show different directions. Therefore, a local window that contains more noise will generate a small WIV, since opposite partial derivatives in the same window cancel out each other. A local window that contains more structures will generate a larger WIV. We here use a noisy CT image Fig. (5a) of the FORBILD head phantom to show how to obtain the structure information. First, partial derivative image along the x-direction is calculated and shown in Fig. 5(b). Partial derivatives in flat regions are noisy and they often have small amplitudes. In order to see their behavior clearly, image profiles indicated by the solid line are shown in Fig. 5(e). Then weighting function hn,m is used to calculate the filtered version of the partial derivative image. The filtered image is shown in Fig. 5(c). Finally, we acquire the WIV values of image f, as shown in Fig. 5(d). The weights induced by WIV help to identify image structures and get rid of the impact of noise.
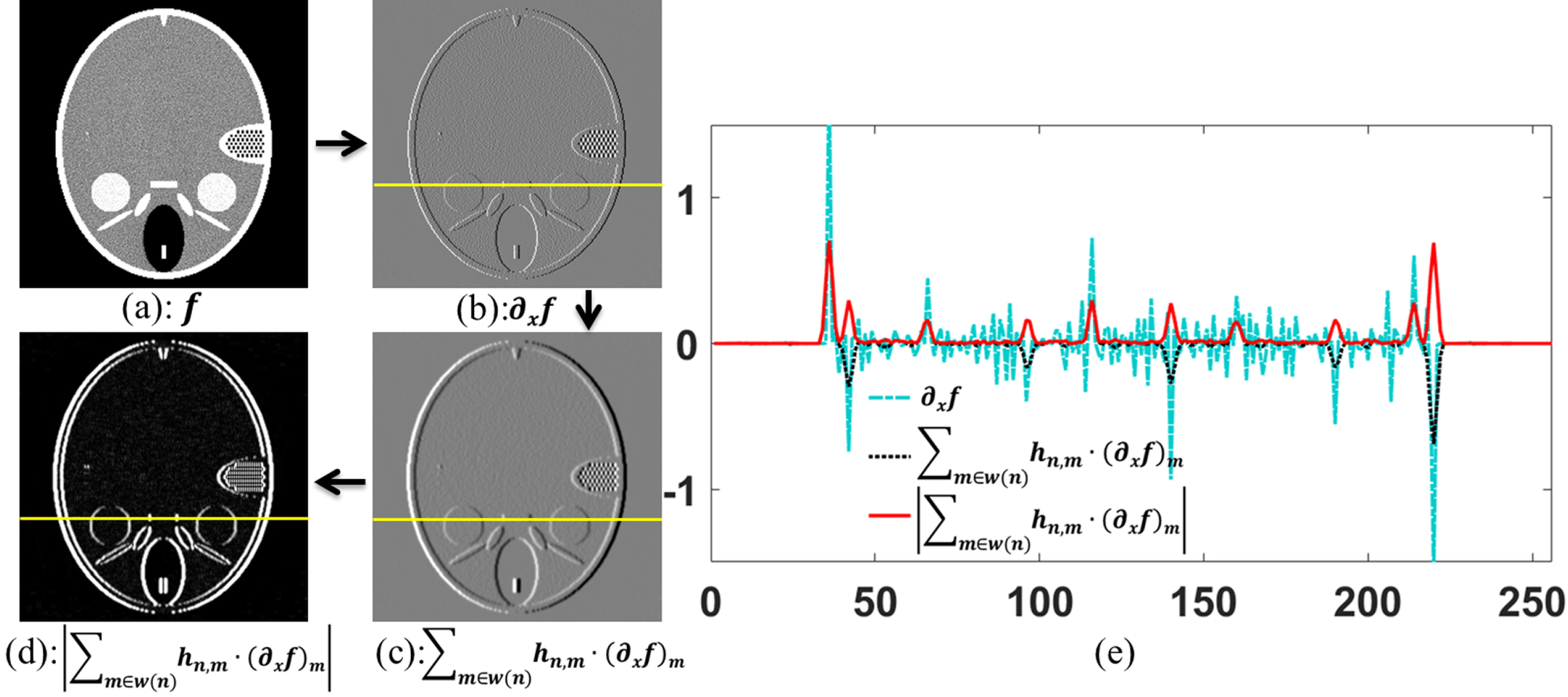
Calculating WIV values of image f: (a) A noisy CT image of FORBILD head phantom, (b) partial derivative image, (c) filtered version of (b), (d) WIV image, (e) image profiles marked by the solid lines in the left panel. The acquired values along the solid line highlight image structures and get rid of the impact of noise.
Next, on question is that can WIV distinguish image structures from shading artifacts? We know that the pixel values in the region of shading artifacts change slowly, while image structures often mean sharp changes in pixel value. WIV is defined as the absolute value of the weighted summation of all partial derivatives in a local window. Therefore, as shown in Fig. 6, a local window that contains more shading artifacts will generate a small WIV, since shading artifacts produce small partial derivatives. A local window that contains more structures will generate a larger WIV. Hence, WIV can also distinguish image structures from shading artifacts. RTV-based reconstruction model can be expressed as follows,
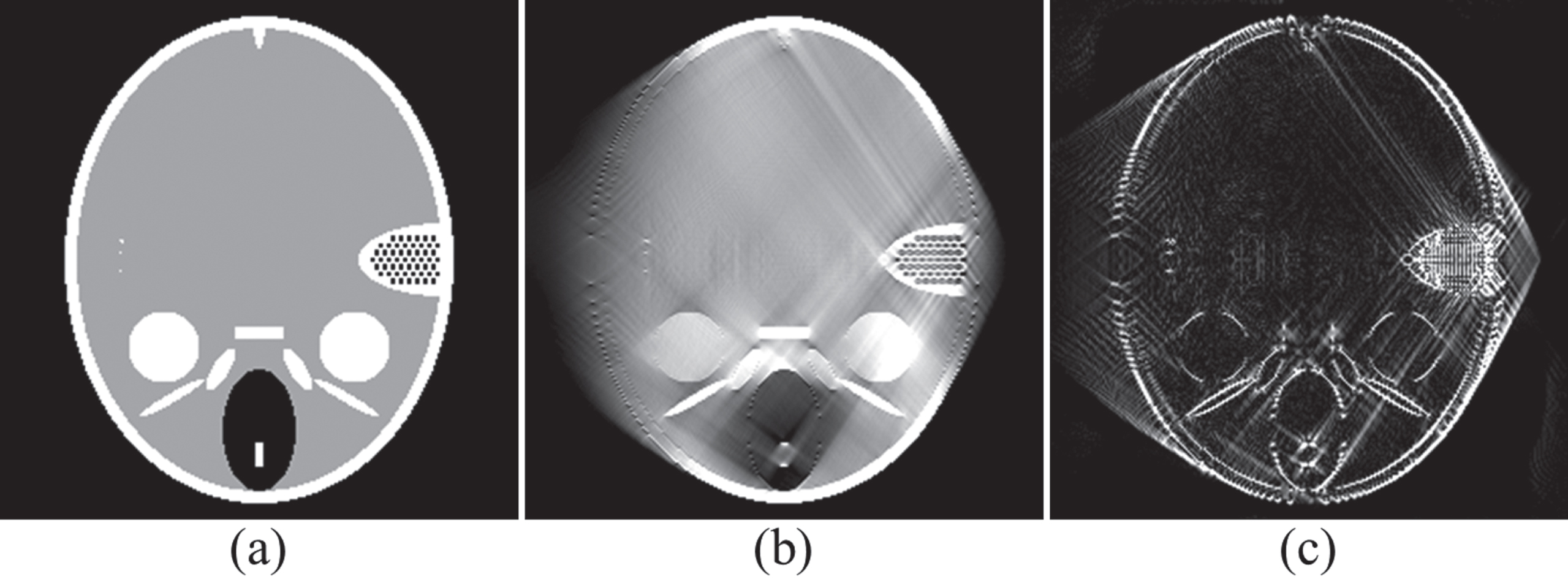
(a) FORBIL head phantom, (b) image with shading artifacts, (c) WIV image of image (b). Pixel values in the region of shading artifacts change slowly, so a local window that contains shading artifacts will generate a small WIV. The weight induced by WIV can effectively identify image structures.
The first term uses SLA CT data to reconstruct an initial guess of CT image. The second term uses two observations above to reduce shading artifacts and recover structures. Where f denotes represents the image to be reconstructed, and f n represents the n th pixel value of image f. For short, we call this method RTV method.
The proposed reconstruction model (6) is nonconvex, so we endeavor to find a reasonable solution that may be a local minimizer. In this work, we use a simple two-step algorithm to solve problem (6). Minimizing the first term is a quadratic optimization problem, whose solution can be acquired by fk+1/2 = (R
T
R) -1R
T
p. However, computing the inverse matrix (R
T
R) -1 is hard because of large size of R. In this work, we linearize the first term at f(k), and acquired the following equation,
Then, solving problem (6) is transferred to solving the following problem,
Note, this problem can be reformulated as follows,
Immediately, we can get the following equivalent expression via adding a constant term,
Therefore, we can solve problem (6) via the following two steps,
Subproblem-2 uses RTV regularization to reduce shading artifacts. Parameter η affects the effect of RTV regularization. A large value may smooth structural information, while a small value can retain more details but may not reduce shading artifacts and noise. A proper parameter η is expected to render visually decent image f(k+1), which is used as the input image of subproblem-1 at next iteration and is closer to our expected solution. Subproblem-2 can be solved by the algorithm designed in Ref. [30]. For easy reading, we briefly describe this algorithm here. First, x- and y-direction parts of RTV are respectively decomposed and re-arranged into a quadratic term and a non-linear term as follows (x-direction part),
Then, for y-direction part of RTV, we have the following equations,
Based on these operations, subproblem-2 can be transformed into solving the following problem,
In order to solve problem (8), we first use SART to decrease the energy of the data fidelity item. Then, RTV of the intermediate image is minimized by solving problem (10) and it has been proved that the used algorithm can quickly converge to a solution. Its solution can be viewed as a proximal map of image f(k+1/-2). Overall, a complete main cycle of our algorithm is a composition of a gradient descent step and a proximal map. We can conclude that the final solution f* is a fixed point of the proximal operator. Since the reconstruction model (6) is nonconvex, we can only find a local minimizer.
To sum up, we list the whole algorithm flow in Table 1. Parameter N out is the maximum iteration steps of the algorithm. Parameter ξ1 measure the relative error between images at two adjacent steps. If parameter ξ1 < ξ0, the algorithm will terminate in advance.
Algorithm flow of RTV method for SLA CT reconstruction
In RTV method, some parameters need to be determined: η, ɛ, τ, σ, N RTV , ξ0 and N out . Parameter N out is the total number of iterations, which is set to 2000 in this work. When ξ1 is less than 10–6 (ξ0), the algorithm will terminate. Then we also give reference values for other parameters. In addition, in order to more clearly show the impact of parameters on image quality, we assign different values to one parameter, and then plot the RMSE and SSIM of their respective reconstructed images in Fig. 7. From the first-row image in Fig. 7, we can see that a proper parameter η is conductive to reconstructing higher-quality image, it varies in the range of [0.001, 0.005] for all experiments on digital phantom. For real data experiments, it should be adjusted cautiously and mainly varies in the range of [0.000001, 0.00003]. N RTV is the number of iterations to solve Subproblem-2, and the second-row images in Fig. 7 show that parameter N RTV larger than or equal to 4 is desirable for obtaining high-quality images, and it is set to 6 for all experiments in this work. Parameters ɛ is used to avoid zero denominators and varies in [0.00001, 0.01]. A small ɛ is our regular choice. Parameters τ is also used to avoid zero denominators and varies in [0.00001, 0.001] in this work. Finally, we can see that parameter σ has little impact on the image quality. We analyze the reason is that it is vital for structure extraction from texture; however, the used phantom has no texture information and obvious noise. It varies in the range of [1, 3] in this paper to save computing resource. According to the trend of these curves, we can determine appropriate reconstruction parameters in numerical simulation experiment. In real CT applications, only limited-angle CT data is available, there is no reference image or the reference image is difficult to obtain. The selection of regularization parameter depends too much on the experience and manual selection may lead to unrealistic reconstructions. Thus, real CT reconstruction calls for methods that adaptively determine regularization parameters. And that’s going to be one of the main topics in our next study.
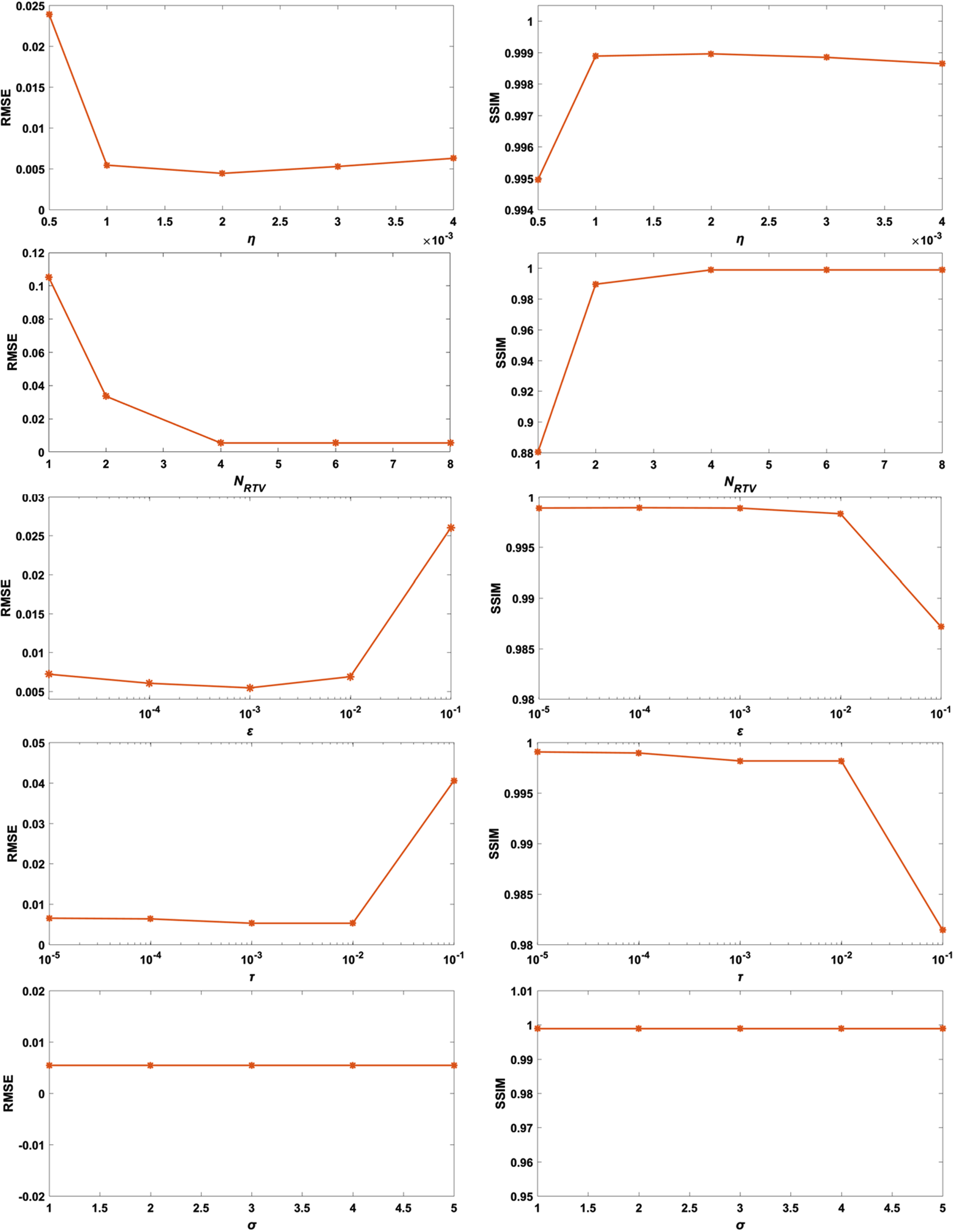
Impact of reconstruction parameters on image quality.
In this section, experiments on digital phantoms and real CT data are reported to prove the effectiveness of the proposed reconstruction method. First, we use two digital phantoms (Fig. 8) to evaluate the performance of different methods. The results of reconstructed images and their quantitative evaluation will be displayed. Second, real CT data experiments are used to verify the effect of our method in real scenes. All the experiments are run on a laptop computer (8.0 GB memory, 2.40 GHz CPU, NVIDIA GeForce GTX 1650 card, Windows 10 64-bit system environment).
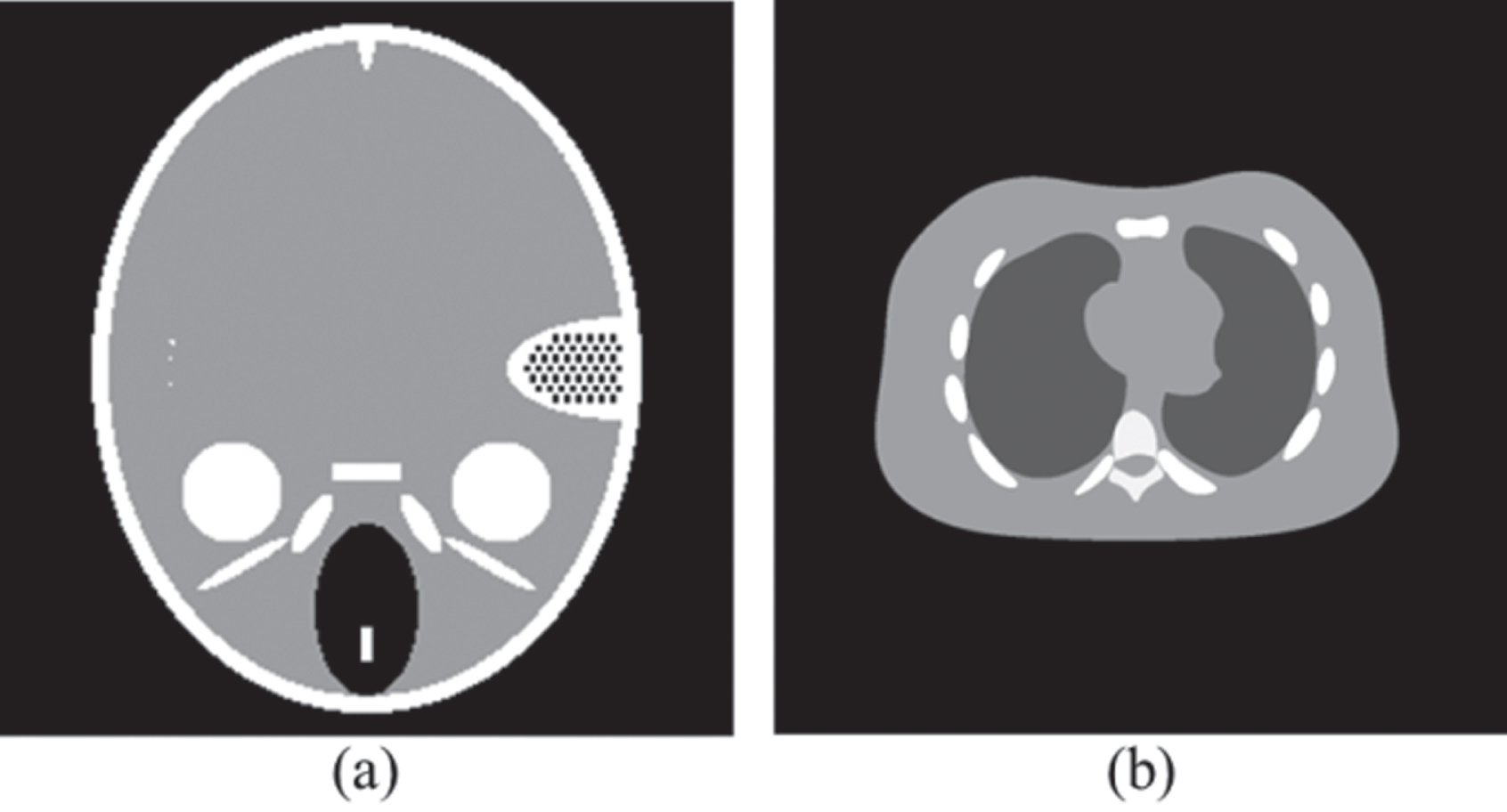
(a) Reference image of FORBILD head phantom, (b) Reference image of NCAT phantom.
We first use the FORBILD head phantom and NCAT phantom to verify the proposed reconstruction method. We use these experiments to show that the effectiveness of our method is due to its ability to distinguish image structures from shading artifacts and noise. The two phantoms consist of 256×256 pixels. The geometric parameters used for scanning and CT reconstruction are listed in Table 2. Poisson noise and Gaussian noise are added to noise-free projection data. The incident photon number is 1×105. The mean value and variance of Gaussian noise is 0 and 0.1% ×||p||∞, respectively. In this work, RTV method is compared to MDTV, wATV, and ADM-L0 methods. In addition to reconstructed images, their root mean square error (RMSE), peak signal to noise ratio (PSNR), and structural similarity (SSIM) [39] are calculated for image quality comparison.
Scanning and reconstruction parameters in simulation experiments
Scanning and reconstruction parameters in simulation experiments
In this section, the projection data in the range of [(0°, 30°] ∪ [120°, 150°] ∪ [240°, 270°] is used for image reconstruction. MDTV, wATV, ADM-L0 and RTV method are used to reconstruct CT image, their results are shown in the first row of Fig. 9, and their residual images are shown in the second row. In this experiment, reconstruction parameters for all methods are shown in Table 3. We can observe that ADM-L0 and our method can recover sharp image structures and reduce more artifacts than MDTV and wATV methods. When compare ADM-L0 and our method, it is difficult to see some differences from the reconstructed images, but we can observe their different performance from the residual images. The FORBILD head phantom is piecewise constant, and the residual image of ADM-L0 method is piecewise constant, but some image edges are not well recovered. Despite all this, their image quality approaches to each other closely. To show the superiority of RTV method, their RMSE, PSNR, and SSIM are calculated and listed in Table 4, which indicate the CT image obtained by the proposed method is closer to the reference image.
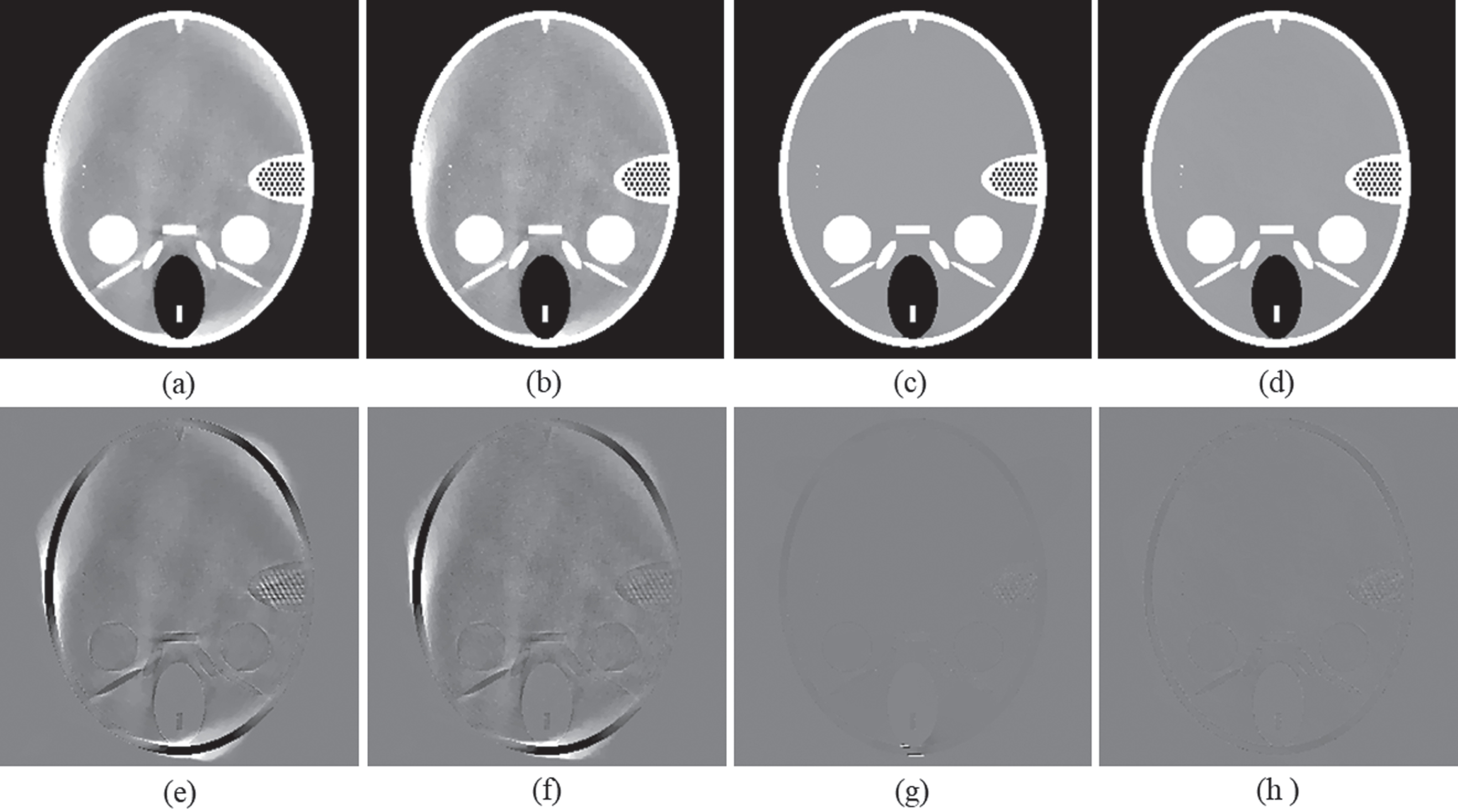
Images of the FORBIL head phantom reconstructed from projection data in the range of [0°, 30°] ∪ [120°, 150°] ∪ [240°, 270°], (a) MDTV, (b) wATV, (c) ADM-L0, (d) RTV method; (e), (f), (g), and (h) are their residual images. The display window for CT images is [0.8, 1.2] and for residual images [–0.2, 0.2].
Reconstruction parameters for the FORBILD head phantom and the reconstructed images are shown in Fig. 9
SSIM, RMSE and PSNR of CT images of FORBILD head phantom, and the reconstructed images are shown in Fig. 9
In addition to this experiment, the projection data in the range of [0°, 18°] ∪ [72°, 90°] ∪ [144°, 162°] ∪ [216°, 234°] ∪ [288°, 306°] is used for image reconstruction. All competing methods are used to reconstruct CT image. Reconstructions results are shown in the first row of Fig. 10, and their residual images are shown in the second row. Reconstruction parameters for all methods are the same as that shown in Table 3. We can see that obvious artifacts appear in the images reconstructed by TVM and wATV methods, while ADM-L0 and RTV method can reduce more shading artifacts. RMSE, PSNR, and SSIM of these CT images are calculated and listed in Table 5, which indicate the CT image obtained by RTV method is closer to the reference image.
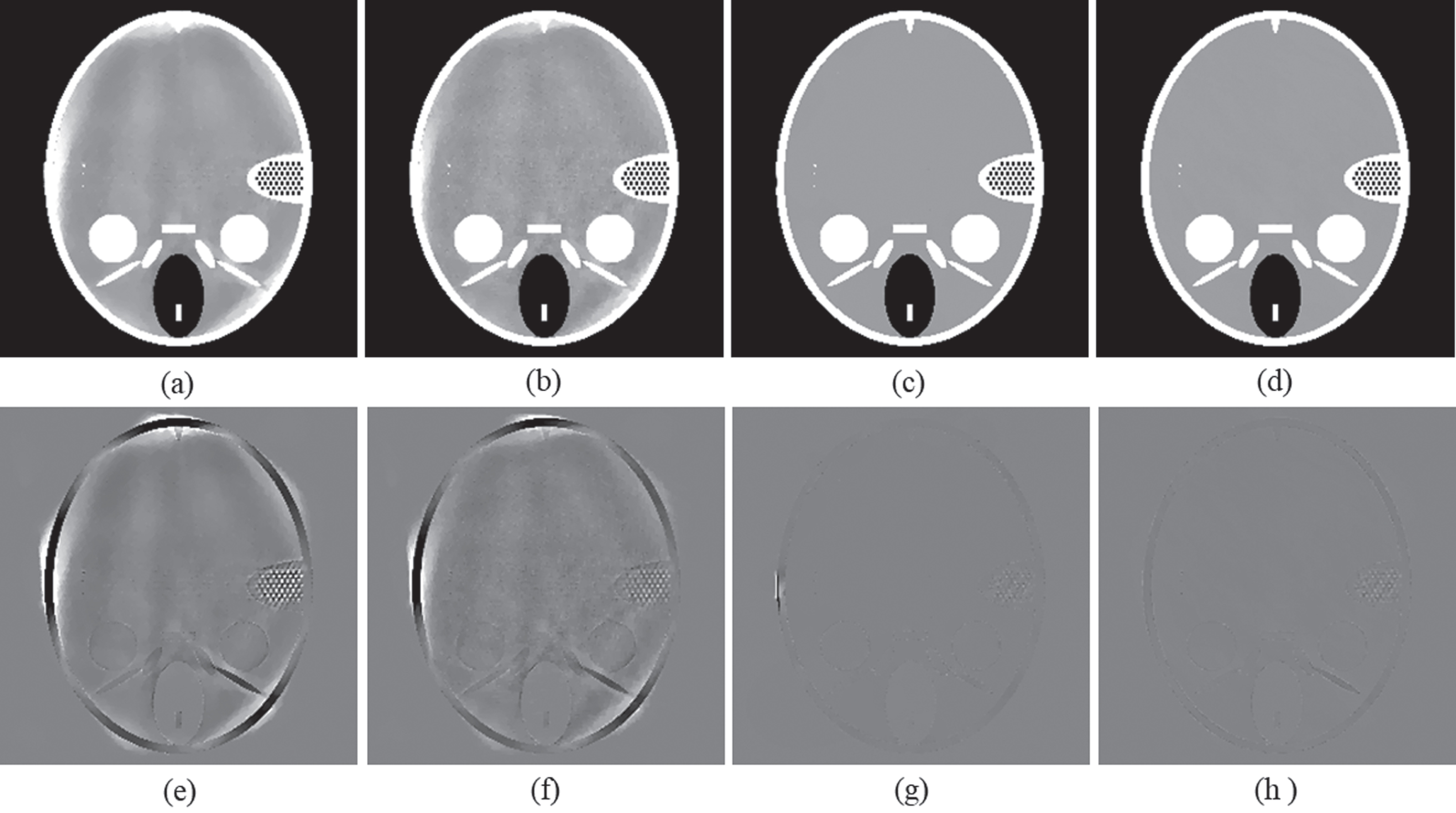
Images of the FORBILD head phantom reconstructed from projection data in the range of [0°, 18°] ∪ [72°, 90°] ∪ [144°, 162°] ∪ [216°, 234°] ∪ [288°, 306°], (a) MDTV, (b) wATV, (c) ADM-L0, (d) RTV; (e), (f), (g), and (h) are their residual images. The display window for CT images is [0.8, 1.2] and residual images [–0.2, 0.2].
SSIM, RMSE and PSNR of CT images of FORBILD head phantom, and the reconstructed images are shown in Fig. 10
In order to clearly show the superiority of our method, we plot profiles of the images in the first experiment on FORBILD head phantom along some row, the figures are shown in Fig. 11(a) and (b). And Fig. 11(b)is the close-up of the selected region in (a). We can see that the profile of our method is closer to the reference image.
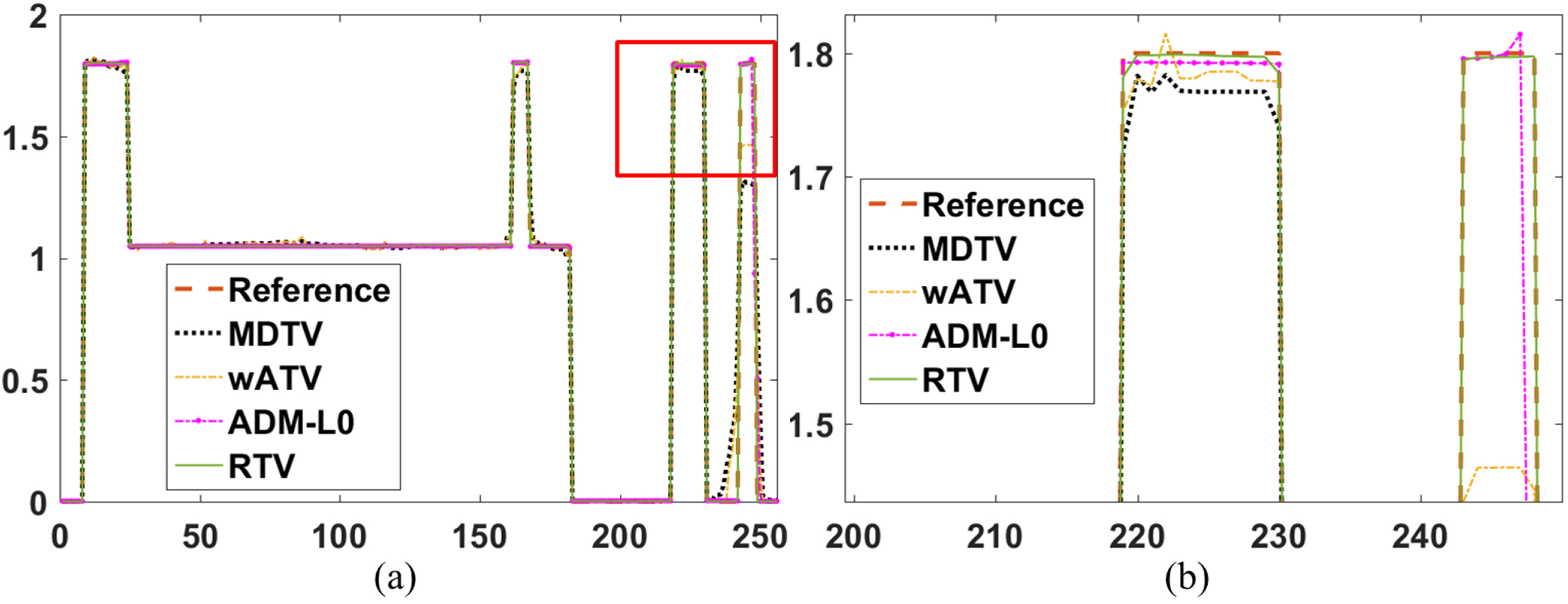
Image profiles in the first experiment on FORBILD head phantom: (a) horizontal profiles along middle image row. (b) is the close-up of the local regions in (a).
SLA sampling can be combined with multisegment straight-line CT (MLCT) scanning. Intermittently reducing the number of segments in MLCT can realize SLA sampling, this under-sampling strategy is conducive to improve the throughput of industrial CT system. Besides, the source fan-beam coverage in MLCT is often less than 180 degrees. In the new experiment, we assume that the projection data is in the range of [0°, 30°] ∪ [60°, 90°] ∪ [120°, 150°]. Then, all methods are used for image reconstruction. Main reconstruction parameters are adjusted referring to those in Table 3. The reconstructed images are not shown in this paper for short. Their RMSE, PSNR, and SSIM of these images are calculated and listed in Table 6, which show that RTV method performs best.
SSIM, RMSE and PSNR of CT images of FORBILD head phantom, and the images are reconstructed from projections in the range of [0°, 30°] ∪ [60°, 90°] ∪ [120°, 150°]
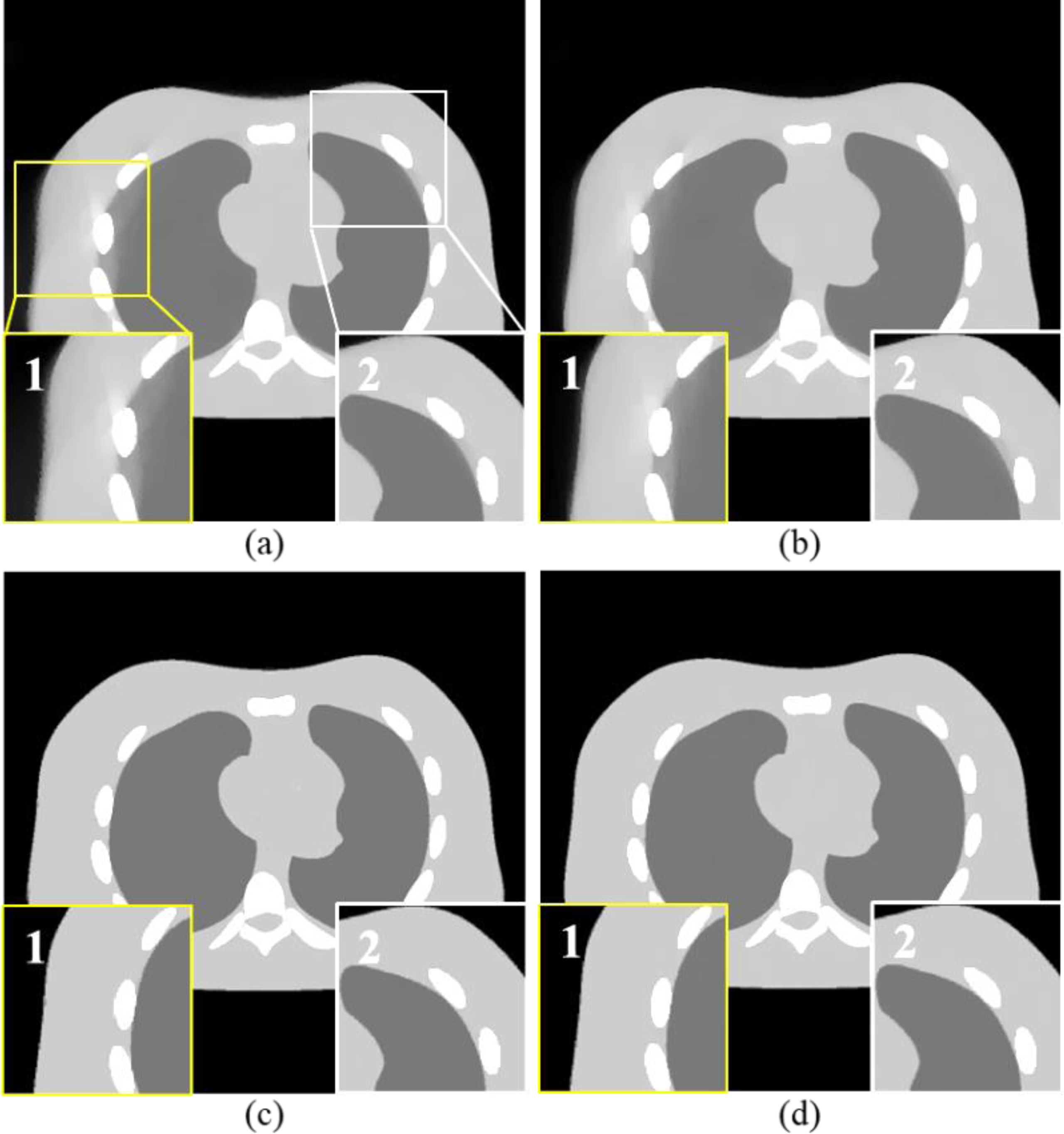
In this section, NCAT phantom is used to compare different reconstruction methods. The projection data in the range of [0°, 30°] ∪ [120°, 150°] ∪ [240°, 270°] is first used for image reconstruction. The reconstructed images are shown in Fig. 12. The reconstruction parameters are shown in Table 7. Thanks to the advantages of SLA sampling, the images reconstructed by all methods have little difference. In order to clearly show their differences, we select two local regions and display their close-ups. Images reconstructed by MDTV and wATV suffer from shading artifacts, which can be observed in their close-ups. ADM-L0 removes most of the shading artifacts, so no obvious artifacts remain in the image or its close-ups. However, ADM-L0 cannot completely recover some image structures (close-up 1). The image reconstructed by our method is closer to the reference image. There is no obvious artifact in its close-ups and image structures are recovered well. Their RMSE, PSNR, and SSIM are listed Table 8, which show that our method performs best, which coincides with the results obtained from image comparison.
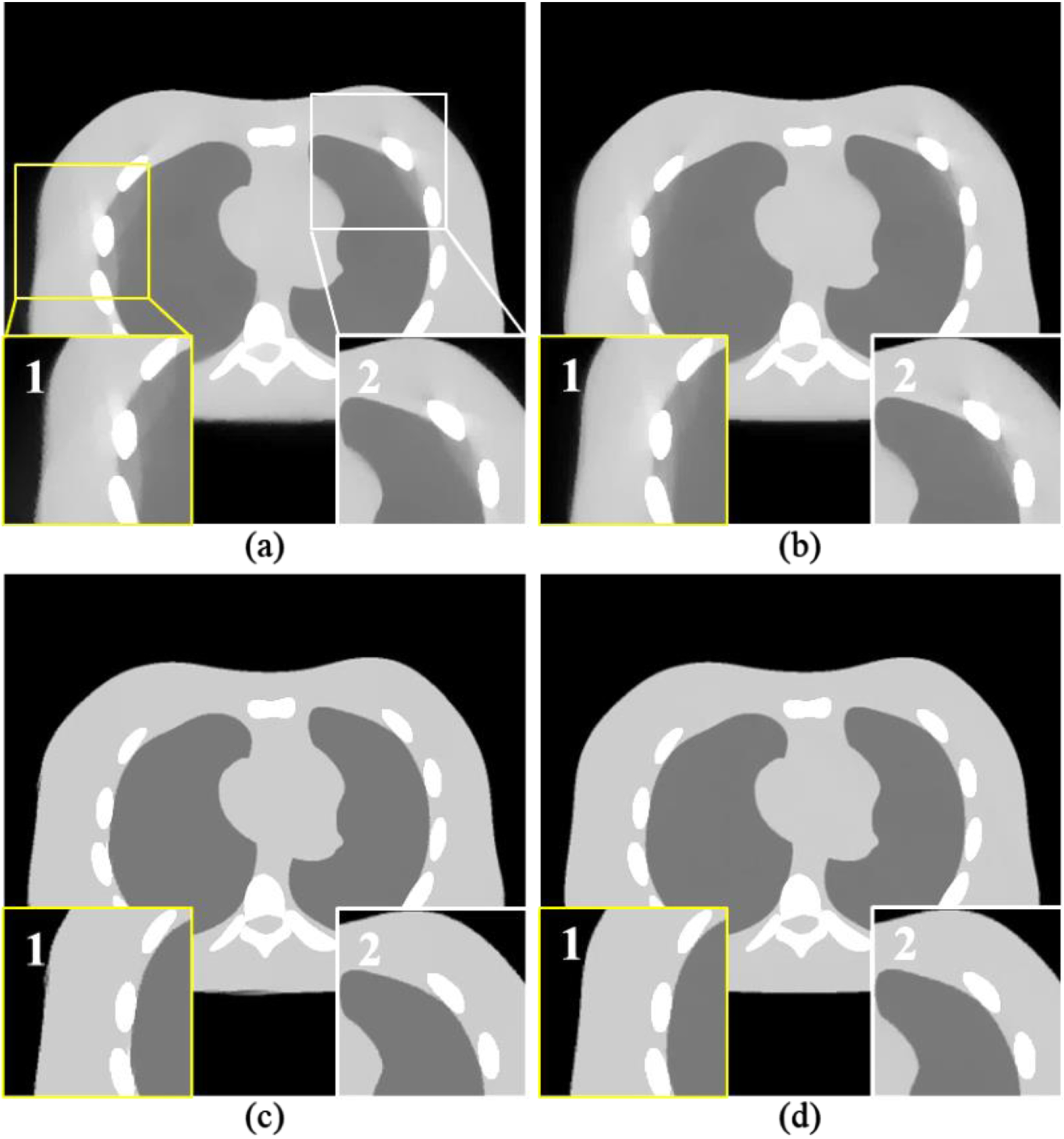
Images of the NCAT phantom reconstructed from projection data in the range of [0°, 30°] ∪ [120°, 150°] ∪ [240°, 270°]. (a) MDTV, (b) wATV, (c) ADM-L0, (d) RTV method. Two local regions are selected for image quality comparison. The display window is [0, 3].
Reconstruction parameters for the NCAT phantom and the reconstructed images are shown in Fig. 12
SSIM, RMSE and PSNR of CT images of the NCAT phantom, and the reconstructed images are shown in Fig. 12
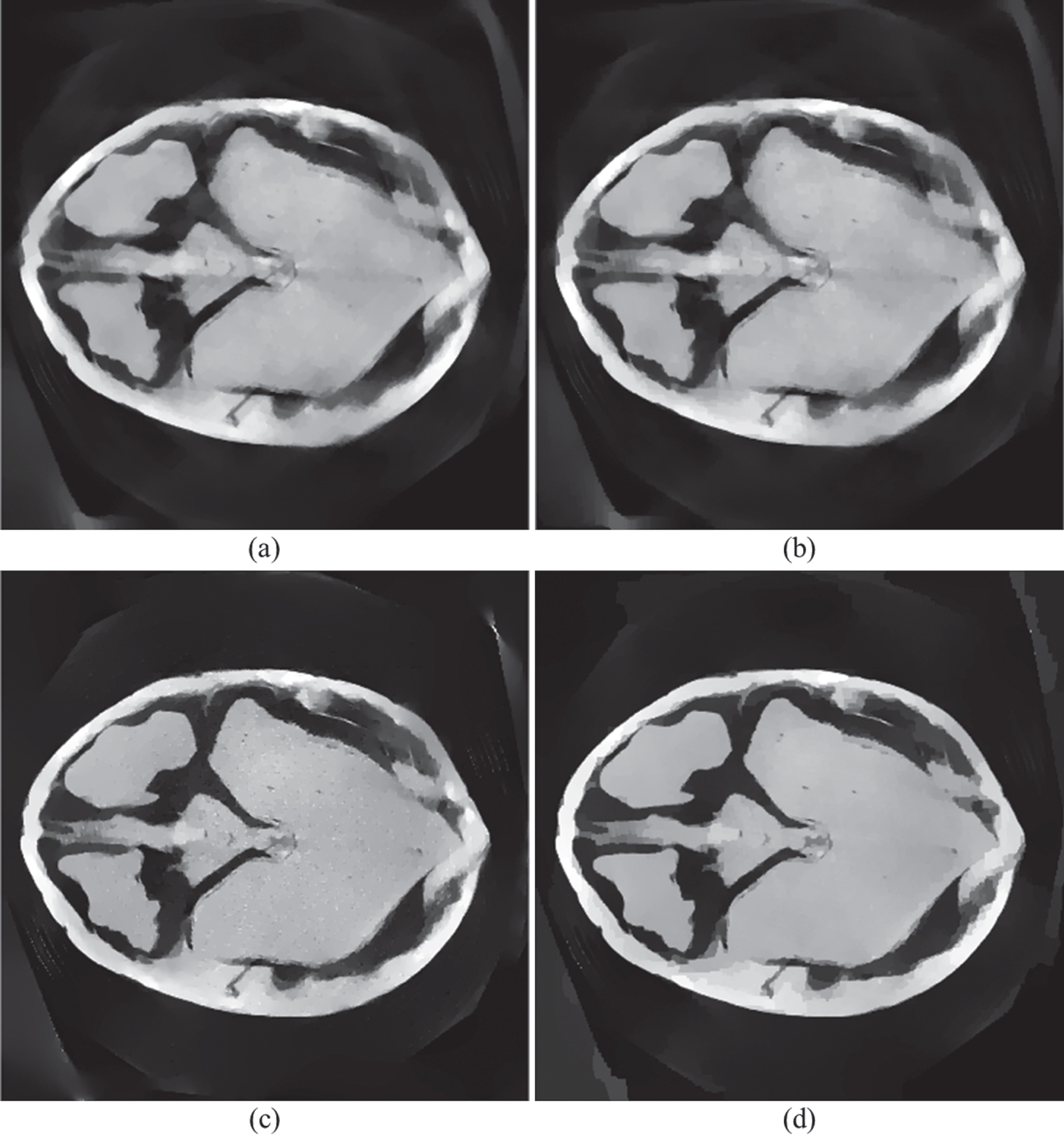
When SLA sampling is combined with MLCT, the projection data of NCAT phantom in the range of [0°, 30°] ∪ [60°, 90°] ∪ [120°, 150°] is used for CT reconstruction. All methods are used for image reconstruction. Reconstruction results are shown in Fig. 13. Main reconstruction parameters are listed in Table 9. Like the results of previous experiment, MDTV and wATV cannot effectively remove the shading artifacts, which can be observed in their close-ups. ADM-L0 and our method reconstruct high-quality images. There are no obvious artifacts in their images or close-ups and image structures are recovered well. In order to compare them, RMSE, PSNR, and SSIM of these images are calculated and listed in Table 10. The image reconstructed by our method is closer to the reference image. Besides, we also plot image profile in the first experiment on the NCAT phantom, and the figures are shown in Fig. 14. Horizontal profiles are plotted as shown in Fig. 14(a). And Fig. 14(b) is the close-ups of the selected region in (a). We can see that the profile of our method is closer to the reference one.
Images of the NCAT phantom reconstructed from projection data in the range of [0°, 30°] ∪ [60°, 90°] ∪ [120°, 150°]. (a) MDTV, (b) wATV, (c) ADM-L0, (d) RTV method. Two local regions are selected for image quality comparison. The display window is [0, 3].
Reconstruction parameters for the NCAT phantom and the reconstructed images are shown in Fig. 13
SSIM, RMSE and PSNR of CT images of the NCAT phantom, and the reconstructed images are shown in Fig. 13
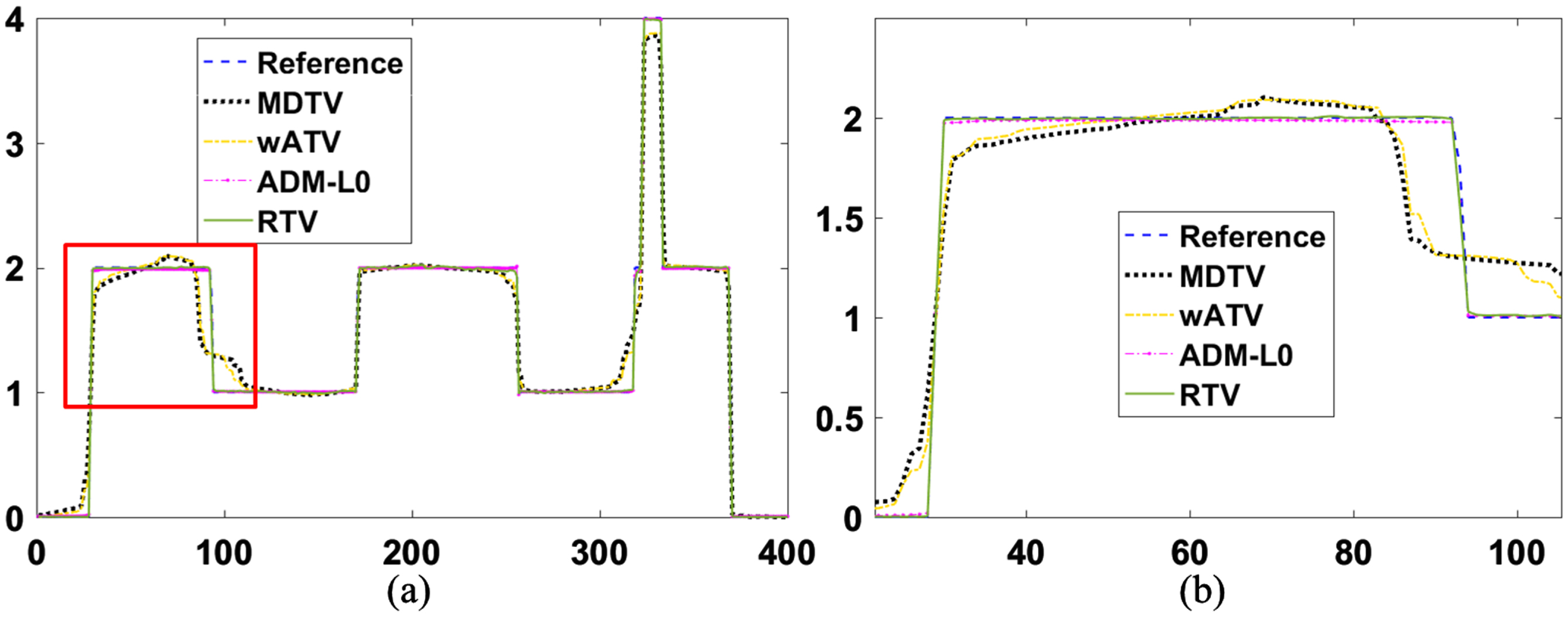
Image profiles in the first experiment on the NCAT phantom, (a) is horizontal profiles along certain image row. (b) is the close-up of the local regions in (a).
We take the previous experiment on the FORBILD head phantom as an example to study whether the presented algorithm can converge. The projection data is in the range of [0°, 30°] ∪ [120°, 150°] ∪ [240°, 270°]. The adopted algorithm in this work is to minimize the objective function in problem (6). Thus, the energy functional is first calculated to see whether it decreases during iteration process. Then, RMSE is plotted here to see if the intermediate image gradually approaches to the reference image. In order to calculate the energy functional, the data fidelity term and the regularization term are calculated. Data fidelity term
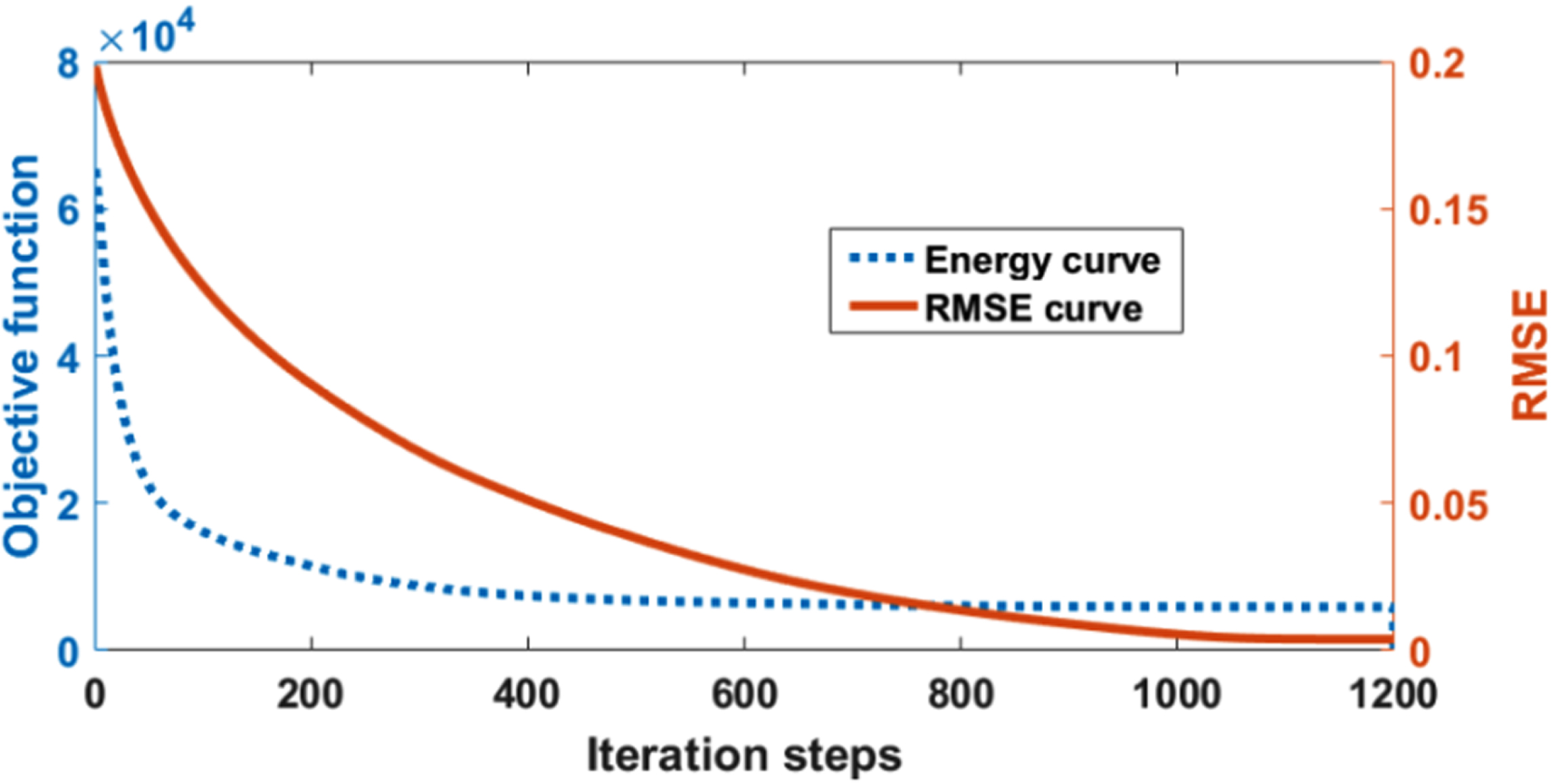
Energy curve and RMSE curve in experiment on the FORBILD head phantom. This figure has two y-axes, the left and right characterize the value of objective function and RMSE of reconstructed images, respectively. These two curves gradually descend to a small value.
Experiments on digital phantom show that the proposed method performs better than other competing methods in term of artifact reduction and structure preservation. In real CT applications, noise and potential artifacts may abate the performance of reconstruction methods. It is necessary to test all reconstruction methods in a more realistic situation. In this section, real CT data of a carved cheese [40] engraved with “CT” is used for image reconstruction. In order compare image quality, a reference image is reconstructed by SART (20 iterations) algorithm using complete projection data and the reference image is shown in Fig. 16(a).
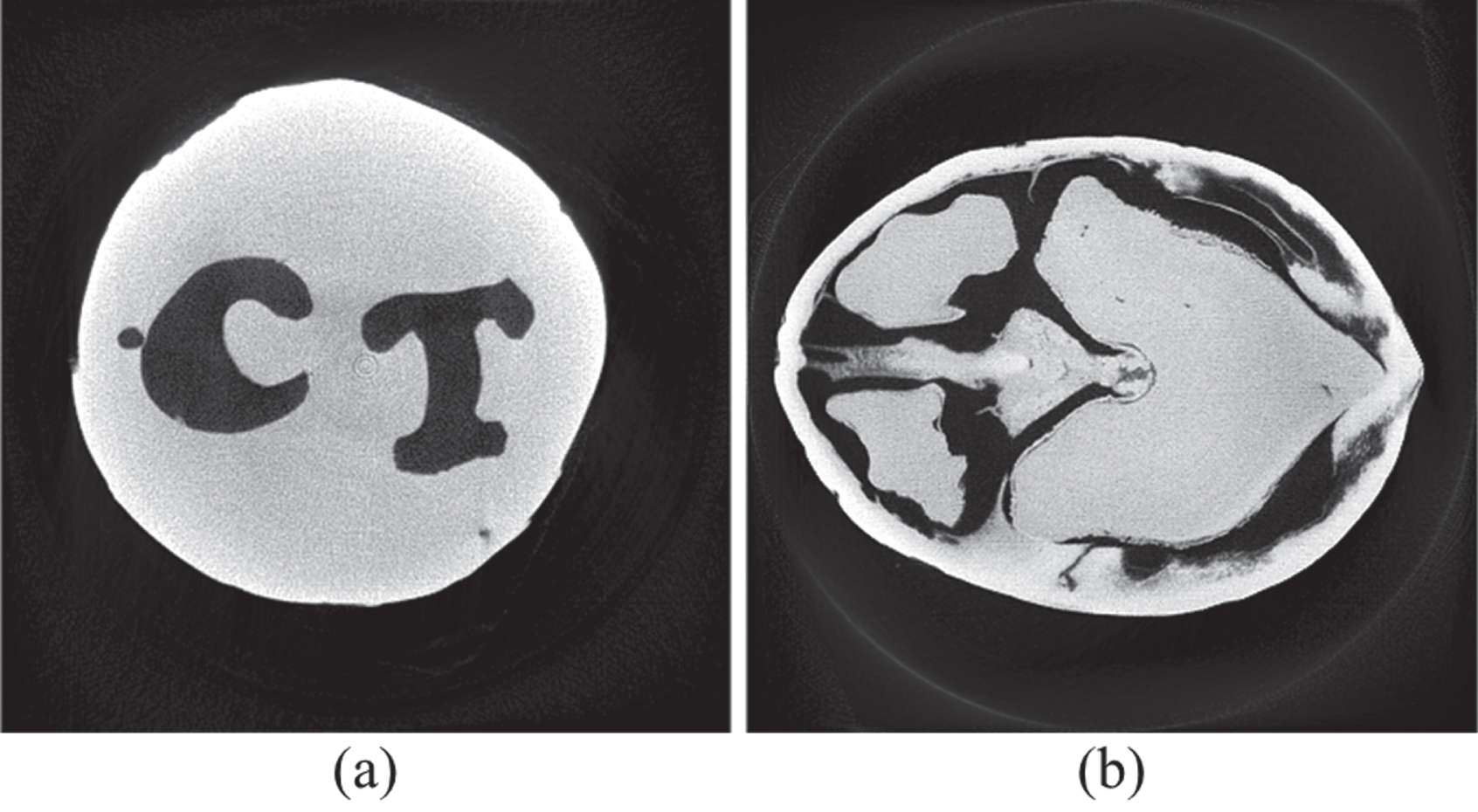
CT images of a carved cheese and a walnut, (a) carved cheese CT image, (b) walnut CT image. The display window is [0.01, 0.05] and [0 0.04], respectively.
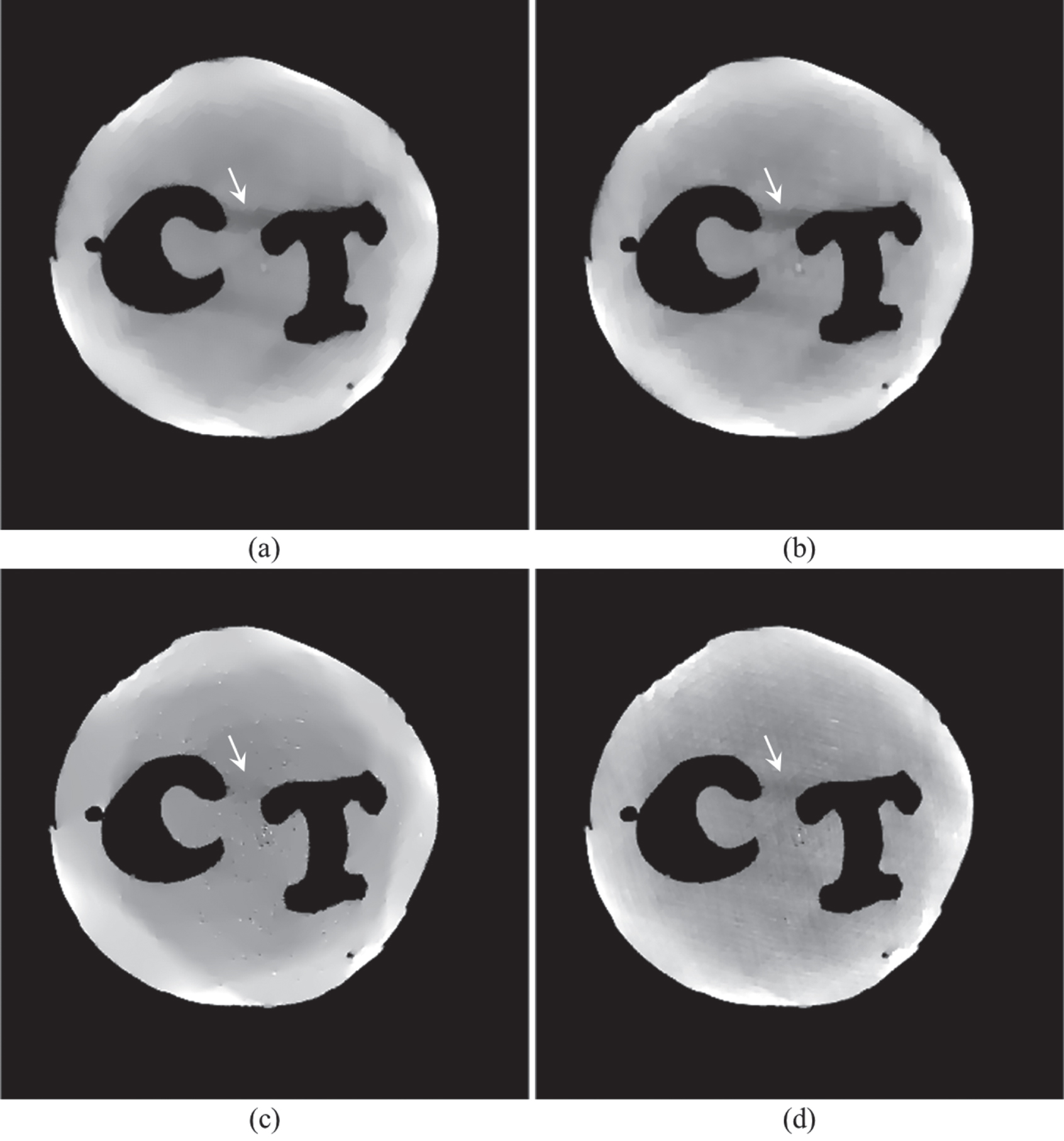
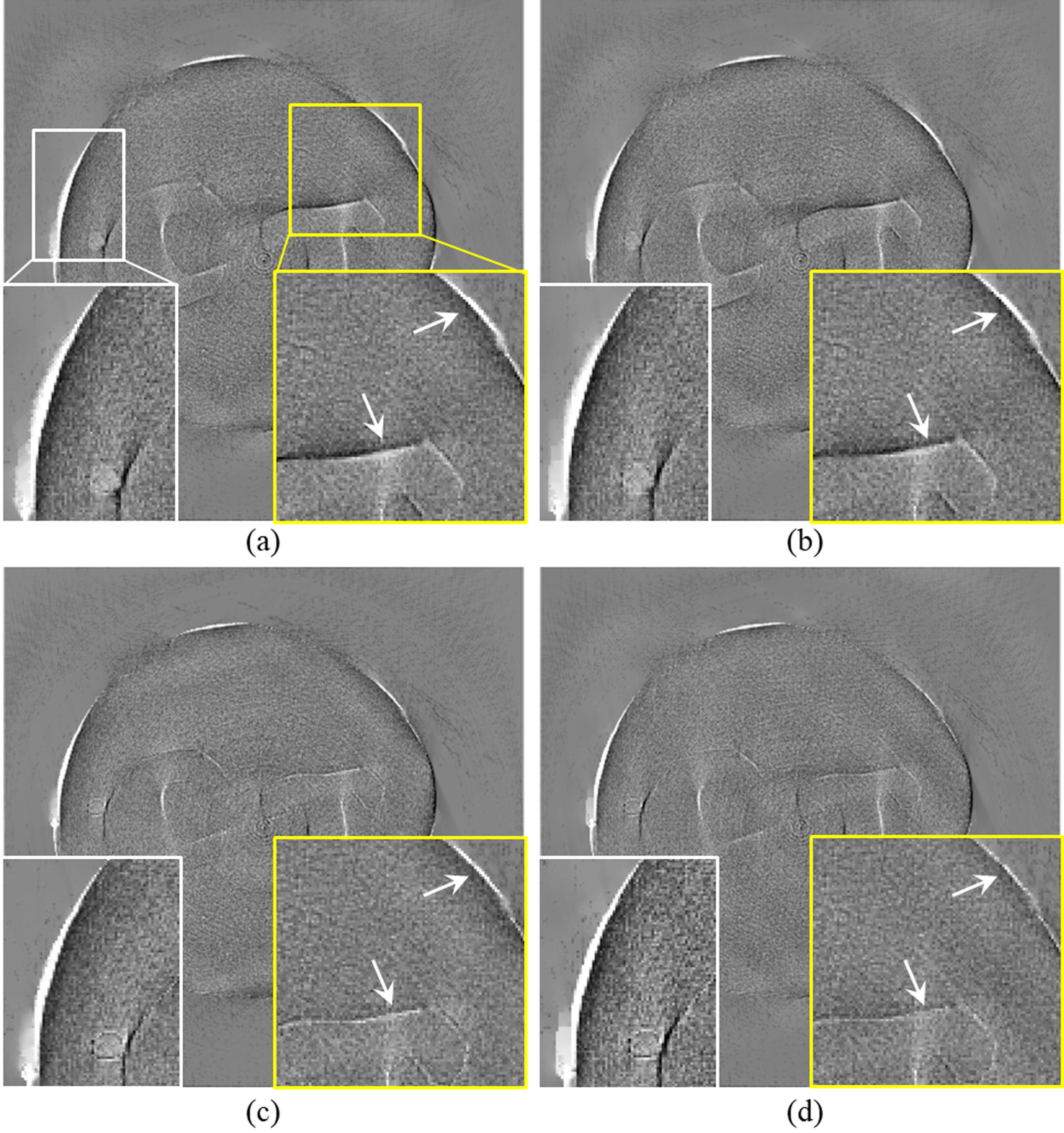
First, the projections in the range of [0°, 30°] ∪ [120°, 150°] ∪ [240°, 270°] is used for image reconstruction. Reconstruction parameters are listed in Table 11. The reconstructed images are shown in Fig. 17. Images acquired by MDTV and wATV methods suffer from obvious blocky artifacts. ADM-L0 method can remove blocky artifacts; however, noise cannot be suppressed well, which can be observed in Fig. 17(c). Our method avoids obvious blocky artifacts and noise. Besides, their residual images are listed Fig. 18 to see differences between different methods. The residual images of MDTV and wATV methods encounter more shading artifacts, which can be observed in close-up 1 and 2 in Fig. 18(a) and (b). ADM-L0 method can suppress the shading artifacts, but it does not perform well in image edge preservation. As indicated by the arrows in close-up 2, our method can better recover some image structures than ADM-L0. And its residual image encounters the least artifacts.
Reconstruction parameters for experiments on a carved cheese, whose CT images are shown in Fig. 17

CT images of a carved cheese reconstructed from projection data in the range of [0°, 30°] ∪ [120°, 150°] ∪ [240°, 270°]. (a) MDTV, (b) wATV, (c) ADM-L0, (d) RTV method. The display window is [0.02, 0.05].
Residual images of different methods related to CT images shown in Figure 17: (a) MDTV, (b) wATV, (c) ADM-L0, (d) RTV method. The display window is [–0.02, 0.02].
When the projection data is in [0°, 30°] ∪ [60°, 90°] ∪ [120°, 150°], the reconstructed images are shown in Fig. 19. Reconstruction parameters are the same as those in Table 11. We can get results similar with the previous experiment. Images reconstructed by MDTV and wATV methods suffer from obvious artifacts, while ADM-L0 method and RTV method can remove blocky artifacts. When comparing ADM-L0 and RTV method, we can see ADM-L0 cannot suppress noise well, while our method avoids obvious noise. Their residual images are listed Fig. 20, which show that MDTV and wATV methods encounter more shading artifacts, which are indicated in close-up 1 (left local region) and 2 (right local region). ADM-L0 and our method can reduce some shading artifacts, but ADM-L0 does not perform well in image edge preservation as indicated by the arrows in close-up 2 in Fig. 20(c). From a comprehensively perspective, our method performs better in artifact reduction and structure preservation.
CT images of a carved cheese reconstructed from projection data in the range of [0°, 30°] ∪ [60°, 90°] ∪ [120°, 150°], (a) MDTV, (b) wATV, (c) ADM-L0, (d) RTV method. The display window is [0.02, 0.05].
Residual images of different methods related to CT images shown in Figure 19: (a) MDTV, (b) wATV, (c) ADM-L0, (d) RTV method. The display window is [–0.02, 0.02].
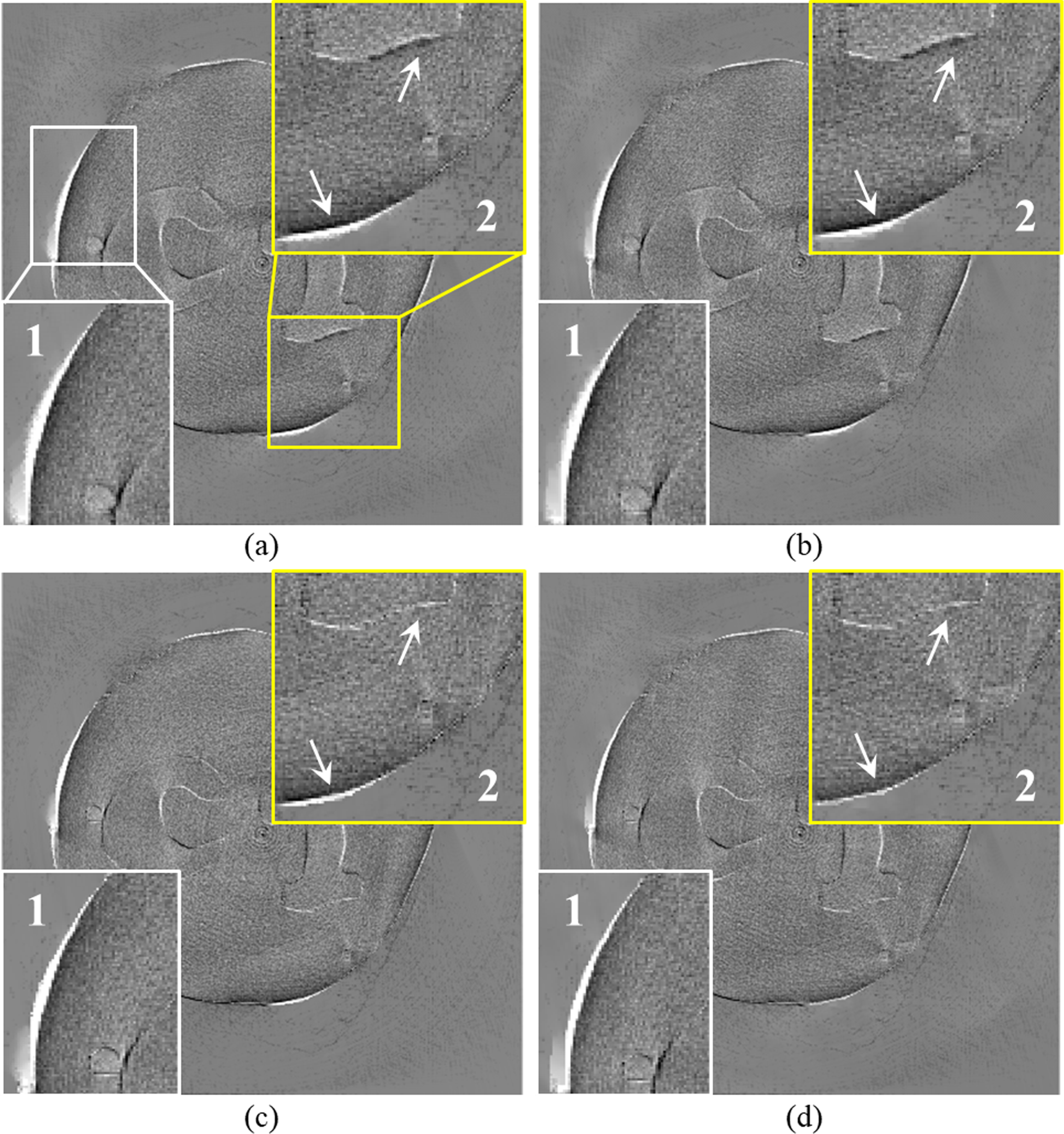
In addition, real CT data of a walnut is used for image reconstruction since it has more details. A reference image is reconstructed by SART (20 iterations) using complete projection data and is shown in Fig. 16(b). Then the projection data in the range of [0°, 30°] ∪ [120°, 150°] ∪ [240°, 270°] is used for image reconstruction. The reconstructed images are shown in Fig. 21. We can see that images acquired by MDTV and wATV methods suffer from obvious shading artifacts. ADM-L0 method can remove some artifacts; however, noise cannot be suppressed well. Our method avoids obvious artifacts and noise. Besides, their residual images are listed Fig. 22. Clearly, the residual images of MDTV and wATV methods encounter more residual artifacts, which can be observed in close-up 1 in Fig. 22(a) and (b). ADM-L0 method can suppress the shading artifacts, but it does not perform well in image edge preservation, as indicated by the arrows in close-up 2. Our method can better recover some image structures than ADM-L0, and the residual image of our method encounters the least shading artifacts.
CT images of a walnut reconstructed from projection data in the range of [0°, 30°] ∪ [120°, 150°] ∪ [240°, 270°]. (a) MDTV, (b) wATV, (c) ADM-L0, (d) RTV method. The display window is [0,0.04].
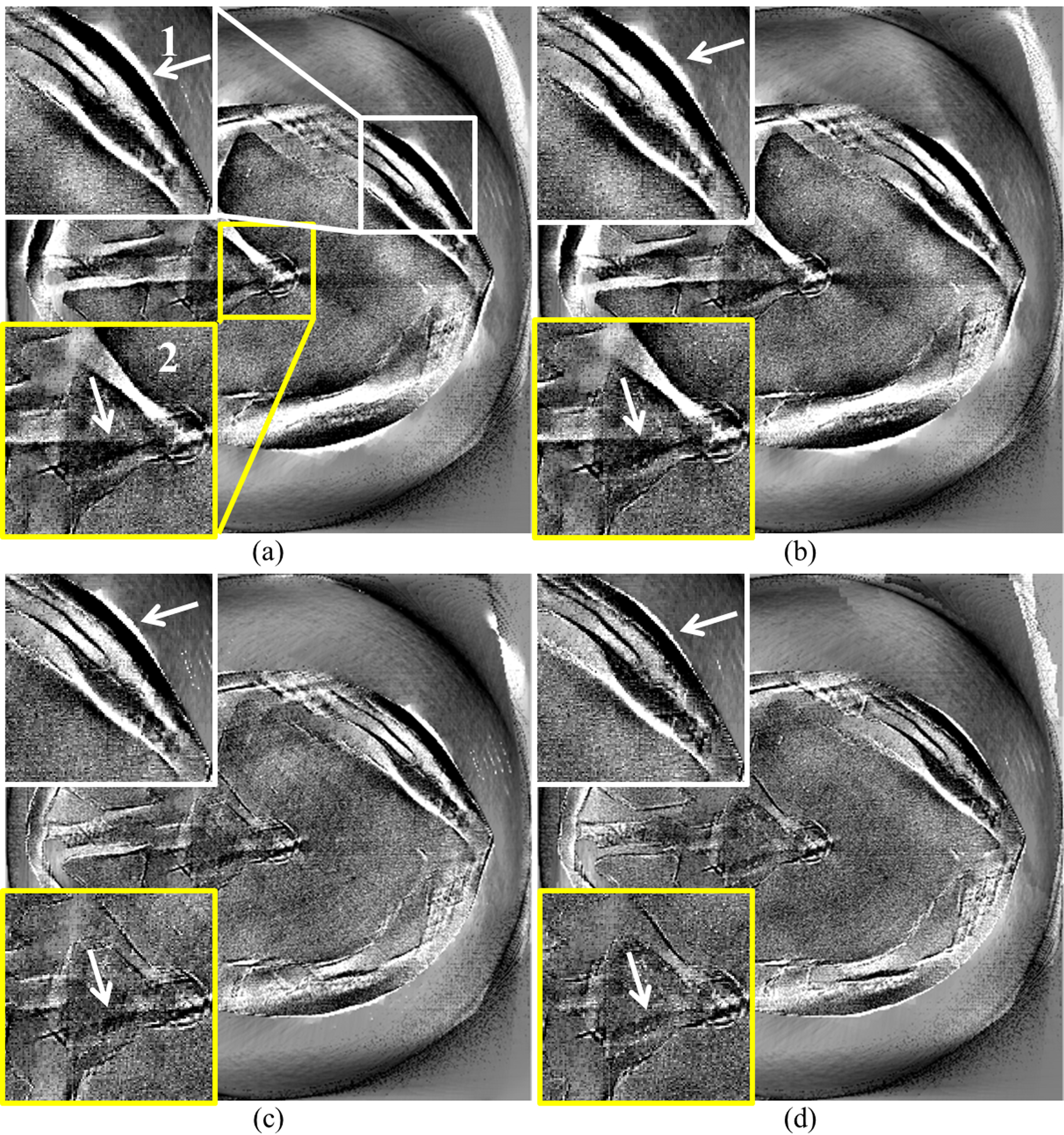
Residual images of different methods related to CT images shown in Figure 21: (a) MDTV, (b) wATV, (c) ADM-L0, (d) RTV method. The display window is [–0.005, 0.005].
This study endeavors to find a practical CT imaging method, including projection data acquisition and image reconstruction. SLA sampling can avoid disadvantages of few-view sampling and limited-angle CT reconstruction. In medical CT, SLA sampling completes projection data acquisition only by switching the tube voltage a few times. This sampling mode can greatly reduce the switching frequency of the tube voltage and can be realized on traditional single-source CT platform without introducing additional cumulative dose. In industrial CT, the combination of SLA sampling and MLCT platform first adapts to the characteristics of batch detection of industrial products so as to improve the throughput of CT system. Besides, it reduces the load of X-ray tube. SLA sampling is expected to become a practical under-sampling scheme. Following this sampling scheme, we have tried to regularize the reconstructed images using multi-direction total variation in our previous work [8]. However, this method cannot reduce the shading artifacts obviously. Hence, in this work, we focus on using the differences between image structures and shading artifacts to regularize CT images, rather than using the direction information of scanning angular range. The used reconstruction method needs to determine some parameter values. Nevertheless, we have given each parameter a relatively fixed reference value to reduce the inconvenience of usage caused by multiple parameters. Although our method outperforms some methods, this CT imaging method including data acquisition and image reconstruction also has its limitations, which needs further consideration and optimization.
First, SLA sampling requires the X-ray source and detector to span a large angular range. For example, in the experiments on FORBILD head phantom, when the projection data is in the range of [0°, 30°] ∪ [120°, 150°] ∪ [240°, 270°], the angular range spanned is at least 270°; when the projection data is in the range of [0°, 30°] ∪ [60°, 90°] ∪ [120°, 150°], the angular range spanned is 150°. The angular range spanned is larger than that in limited-angle CT. In real CT applications, the scanning angular interval is often less than 1 degree to obtain complete projections. The projections at adjacent angles are likely to be redundant. In limited-angle CT, all data samplings are concentrated in one successive angular range. There are many pairs of redundant projections in this range. In SLA CT, data samplings are distributed in multiple successive angular ranges. Although there exist some pairs of redundant projections in each successive range, the angular gap significantly reduces the redundancy of the projections in different angular ranges. Thus, we think acquired SLA CT data has lower data correlation compared to limited-angle CT, which is conductive to reconstructing higher-quality images. Following this idea, we know that few-view sampling in a short-scan angular range can greatly avoid data redundancy. However, compared to few-view sampling, SLA sampling greatly reduces technical requirements of fast switching tube voltage, which collects projection data with low voltage switching frequency and only needs to turn on and off the tube voltage a few times. This mode can be realized on traditional single-source CT platform. Second, because the X-ray source spans a large angular range, SLA sampling may be subject to the geometry of the scanned object. For example, SLA sampling may not acquire the projection data of a long object, since X-rays cannot pass through the long interior of the object at some view angles. In this case, limited-angle CT may be a better choice. Third, the computational time per iteration of MDTV, wATV, ADM-L0, and RTV method are about 0.3147 s, 0.2878 s, 0.3238 s, and 0.5518 s, respectively. The time consumption of our method is slightly larger than other methods. The extra time mainly comes from calculating elements ux,m, uy,m, vx,m, and vy,m, and solving problem (15) iteratively. Solving the linear equation consumes almost all the time (95%). However, the continuous development of computational power and the power to reduce artifacts and preserve structures offset the potential longer execution time. Besides, the performance of our method is still limited by incomplete projections, new method should be designed to further reduce the shading artifacts.
In conclusion, we present a practical CT imaging method, that is, SLA sampling combined with RTV based CT reconstruction method. And a designed algorithm with two main steps is presented to solve CT reconstruction problem (6). This reconstruction method uses key differences between image structures and shading artifacts to regularize CT images. Experiments on digital phantoms and real CT data indicate that RTV method can obviously reduce shading artifacts.
Footnotes
Acknowledgments
This work is supported by the National Natural Science Foundation of China (61701174), General Project of Chongqing Natural Science Foundation (cstc2021jcyj-msxmX0679), Science and Technology Research Program of Chongqing Education Commission of China (KJQN202000808), and Scientific Research Foundation of Chongqing Technology and Business University (2056023).