
Abstract
This paper investigates the stability and performance of distributed multirate control of direct touch in networked haptic systems that provide users with a remote dynamic proxy of their peer and with passive wave domain communications. The paper considers communication networks with fixed delay and with packet update rate smaller than the update rate of the users' local force feedback loops. After developing a multirate state space model of the direct touch haptic system, the paper uses eigenvalue-based stability analysis to determine the maximum contact stiffness that can be applied to users, as well as the maximum coordination gain that can be used to synchronize the user sites. The analysis predicts that both remote dynamic proxies and passive wave-domain communications make the contact stiffness robust to delay, but only passive wave-domain communications mitigate the negative impact of delay on the coordination gain. In other words, the analysis suggests that passive wave-domain communications should be employed to make the distributed multirate control of direct touch in networked haptic systems stable regardless of the fixed communication delay. However, if power-domain communications are employed, remote dynamic proxies should be used to allow rendering of stiffer contact between users. Experiments in which two users probe each other using similar haptic interfaces validate the analytical results.
Keywords
1. Introduction
Haptic sharing of networked virtual environments is beneficial in applications like tele-therapy (Sugarman H., Dayan E., Weisel-Eichler A., and Tiran J., 2006), virtual reality-based surgical training (Mitra P. and Niemeyer G., 2007) and multi-user online computer games with haptic feedback (Kim Y.-B., Han S.-H., Kim S.-J., Kim E.-J., and Song C.-G., 2007). In such applications, the networked users need to both cooperatively manipulate shared virtual objects (SVOs) and to directly interact with each other. For instance, in tele-therapy, remote patients may require assistance both to open their hand to grasp a virtual cup and to carry it to a specified location. In online hockey with haptic feedback, the remote players should be able to both hit the virtual puck and to touch their partner's stick.
Cooperative haptic manipulations of SVOs have been implemented using both centralized and distributed controllers, over both power-domain and wave-domain communications 1 . For power-domain communications, several experimental studies have investigated the impact of network delay, jitter and packet loss on the stability and fidelity of the networked haptic cooperation (Hikichi K., Morion H., Arimoto I., Sezaki K., and Yasuda Y., 2002), (Alhalabi M. O., Horiguchi S., and Kunifuji S., 2003), (Fujimoto M., and Ishibashi Y., 2005), (Sankaranarayanan G., and Hannaford B., 2006), (Sankaranarayanan G., and Hannaford B., 2008), (Lee S., and Kim J., 2009). Stability analyses have been developed: i) for centralized (Ishibashi Y., and Kaneoka H., 2006), (Kim J., Kim H., Tay B. K., Muniyandi M., Srinivasan M. A., Mortensen J., Oliveira M., and Slater M., 2004) and distributed (Cheong J., Niculescu S.-I., and Kim C., 2009), (Kim Y.-B., Han S.-H., Kim S.-J., Kim E.-J., and Song C.-G., 2007) control strategies considering constant network delays; ii) for centralized and distributed control in the presence of constant network delay and limited packet update rate (Fotoohi M., Sirouspour S., and Capson D., 2007); and iii) for distributed control across the Internet (Lee D., and Huang K., 2010). The results in (Fotoohi M., Sirouspour S., and Capson D., 2007) indicate that distributed control can render stiffer virtual contacts than centralized control and thus, is advantageous for haptic cooperation in rigid virtual environments. The results in (Lee D., and Huang K., 2010) provide guaranteed stable force feedback during cooperative probing of a static virtual object over a packet-switched network. However, they do not support torque feedback or cooperation in dynamic virtual environments because they require a passive integrator developed for the simulation of a point mass interacting with a virtual wall. For wave-domain communications, distributed haptic cooperation has been studied experimentally in (Sankaranarayanan G., and Hannaford B., 2006), (Arioui H., Kheddar A., and Mammar S., 2002), (Arioui H., Kheddar A., and Mammar S., 2002) and (Li Z., and Constantinescu D., 2009), while centralized haptic cooperation has been considered in (Yasrebi N., and Constantinescu D., 2009). The experimental investigations have confirmed the robustness to transmission delays of haptic cooperation with unirate wave-domain communications. The analysis in (Yasrebi N., and Constantinescu D., 2009) has shown that multirate wave-domain communications are passive if aliasing is prevented at the rate drop in the communications due to a network packet update rate lower than the force feedback update rate at the cooperating users.
Direct user-to-user networked haptic interaction has been tackled in (Li Z., and Constantinescu D., 2009) through distributed control of remote dynamic proxies (RDPs). The RDPs are physically-based proxies of remote peers in the local virtual environment of each user. They are simulated at the high rate of force feedback at the user at whom they reside, and are coordinated to the peer whom they represent at the slow packet update rate of the communication network. During direct networked touch, the RDPs prevent the remote peer position discontinuities caused by the infrequent packet updates from leading to force feedback discontinuities and possibly to instability. Multirate analytical results and experiments in (Constantinescu D., Li Z., and Rakhsha R., under review) indicate that the RDPs support stiff direct contact and render smooth motion of the remote peers in the presence of power-domain communications across a network with constant communication delay and slow packet update rate. However, the RDPs do not maintain stable direct networked touch when the communication delay increases.
While passive multirate wave-domain communications have been shown to make centralized haptic cooperation robust to fixed communication delays (Yasrebi N., and Constantinescu D., 2009) and RDPs have been proven to increase the stability region and to display smooth motion of the remote peer when users are connected over power-domain communications, their synergistic effect on the distributed multirate control of direct touch between networked users is unknown. This paper studies the synergy between passive wave communications and RDPs through a comparative stability and performance analysis. The main contributions of the paper are: i) the development of a multirate state-space model of distributed control of direct touch with RDPs and passive wave-domain communications; ii) a comparative investigation of stability and performance of distributed multirate control of direct touch without and with RDPs, and over power-domain and passive wave-domain communications; iii) the experimental validation of the analytical results. The analysis and experiments illustrate that both remote dynamic proxies and passive wave-domain communications make the maximum contact stiffness (that can be applied to users) robust to delay, but only passive wave-domain communications mitigate the negative impact of delay on the maximum coordination gain that can be used to synchronize the two user sites. Therefore, this paper suggests that passive wave-domain communications should be employed to make the haptic interaction robust to fixed communication delay. However, if power-domain communications are employed, then RDPs should be used to allow stiffer direct contact between the users.
In the remainder of the paper, Section 2 introduces the distributed multirate control architecture for direct user-to-user haptic interaction with RDPs over passive wave-domain communications. Section 3 derives the multirate state-space dynamics of the direct touch system and uses these dynamics for the comparative stability and performance analysis. The comparison contrasts direct touch systems with and without RDPs, with passive wave-domain and with power-domain communications. Section 4 validates the theoretical results through experiments. Section 5 summarizes the conclusions drawn from this work and discusses possible directions for future work.
2. Distributed Multirate Control of Direct Touch with RDPs and Passive Wave-Domain Communications
Wave-domain communications (Niemeyer G., and Slotine J.-J. E., 1991) have been introduced in bilateral teleoperation, and have been used in haptics to permit the passive transmission of velocity and force information across communication channels with constant time delays. Passive communications are advantageous because they guarantee that any passive user can stably interact with any passive real or virtual environment if the communication delay is constant and the haptic interface is made passive through low-level control. In networked haptic systems, the communication network typically provides a packet update rate that is lower than the users' local force feedback rate. Therefore, a rate drop occurs in the communication channel and a multirate strategy is needed to control the haptic interaction. The rate drop may introduce aliasing and compromise the passivity of the wave-domain communications (Yasrebi N., and Constantinescu D., 2009). To guarantee passive wave-domain communications through preventing aliasing the wave signals need to be low-pass filtered before the rate drop (Yasrebi N., and Constantinescu D., 2009).
In distributed control of networked haptic interaction, all users are peers and interact with their own copy of the shared virtual environment (SVE). In turn, the multiple copies of the SVE are coordinated through distributed control. When the local copies of the SVE include RDPs of the remote peers, the RDPs have the same mass and damping as the haptic device of the peer whom they represent, and are coordinated through control to these same devices. The distributed multirate control architecture for two-user direct touch with RDPs and passive wave-domain communications is depicted in Figure 1. In this figure: Tc is the sampling time of the users' local force feedback loops; Tn is the sampling time of the network packet updates; Td is the network delay; FLCi is the contact force applied to Peer i; KLC, BLC are the stiffness and damping of the virtual contacts; FRDPji is the force applied by the coordination controller to the RDP of Peer j in the SVE of Peer i; KRDP, BRDP are the proportional and derivative coordination gains; ẋijd is the velocity command decoded from the wave signal received at Peer i from Peer j;uin i and uin ji are incoming waves at Peer i; uout i and uout ji are outgoing waves at Peer i; M is the downsampling factor; LPs are anti-aliasing low-pass filters with cutoff frequency Ω c = π/M which guarantee the passivity of the wave-domain communications (Yasrebi N., and Constantinescu D., 2009); and yf i and yf ji are the outputs of the anti-aliasing filters. Because users are peers in the distributed control of networked haptics, symmetric wave encoding and decoding is implemented at each user. Note that distributed multirate control of direct touch without RDPs over passive multirate wave-domain communications is a simplification of the architecture shown in Figure 1 and is not presented for brevity.

Distributed multirate control of direct touch with RDPs and passive wave-domain communications. The RDPs and their coordinating control forces are shaded.
The next section derives the multirate state-space dynamics of the closed-loop system shown in Figure 1 and uses them to determine the maximum contact stiffness KLC and the maximum coordination gain KRDP for which distributed multirate control can maintain direct touch with RDPs and passive multirate wave-domain communications stable. The multirate state-space matrices for direct touch without RDPs result through straightforward simplification of the equations derived in Section 3 and are not presented.
3. Multirate State-Space Dynamics of Direct Touch with RDPs and Passive Wave-Domain Communications
The derivations in this section are based on the approach introduced in (Araki M., and Yamamoto K., 1986) and first applied to haptic systems in (Fotoohi M, Sirouspour S., and Capson D., 2007), and are detailed only in as much as needed for the integration of the passive wave-domain communications.
3.1 Discrete-Time multirate State-Space Representation of Direct Touch with RDPs and Passive Wave-Domain Communications
Hereafter, the network sampling interval Tn is assumed to be a multiple integer of the sampling interval of the users' local force feedback loops Tc. Their values are selected to match the experimental testbed in Section 4 and are Tc = 0.001 s and Tn = 0.008 s. The discrete-time open-loop state-space model of direct touch is obtained through multirate discretization of the continuous-time state-space matrices in Appendix A, in the following form:

where the index D defines discrete vectors and matrices, and k represents the k-th network update interval. For detailed derivations of the system matrices

and the position commands are obtained from them through discrete-time integration after unwrapping the algebraic loop typical in wave transformations using xijd [k + 1] = Tc · xijd [k] + xijd [k]. The position and velocity commands are included in the discrete-time state-space dynamics of the distributed haptic system through augmenting the state vector:

where

in which the incoming wave vector is:

The augmented output vector can be written as:

where the outgoing waves are computed at the fast control rate via:

After incorporating the wave dynamics, the discrete-time dynamics of the open-loop system become:

The dynamics of the anti-aliasing filters are included through augmenting the system state:

where
3.2 Stability Analysis
The stability of distributed multirate control of direct touch with RDPs and passive wave-domain communications can be derived after forming the state transition matrix of the closed-loop system

where
In the next section, the following parameter values are used in the calculations: mHDi = mRDPi = 0.1 kg; bHDi = bRDPi = 0.5 Ns/m; BLCi = BRDPi = 3 Ns/m; b = 5 Ns/m; Ω c = 60 Hz. Computational delays equal to one step of the force feedback loop Tc and constant communications delays Td = nt · Tn are also considered in the analysis.
3.2.1 Direct Touch without RDPs
Figure 2 plots the maximum contact stiffness that can be stably applied to users through distributed multirate control of direct touch without RDPs when the users are connected via power-domain communications (PDC) and via passive wave-domain communications (PWDC), and for various communication delays Td = nt · Tn. This figure shows that the contact stiffness decreases rapidly with increasing communication delay when power-domain communications are employed. In contrast, passive wave-domain communications can be used to render much stiffer contact regardless of how large the fixed communication delay is. The experiments presented in Section 4 will verify this analysis.
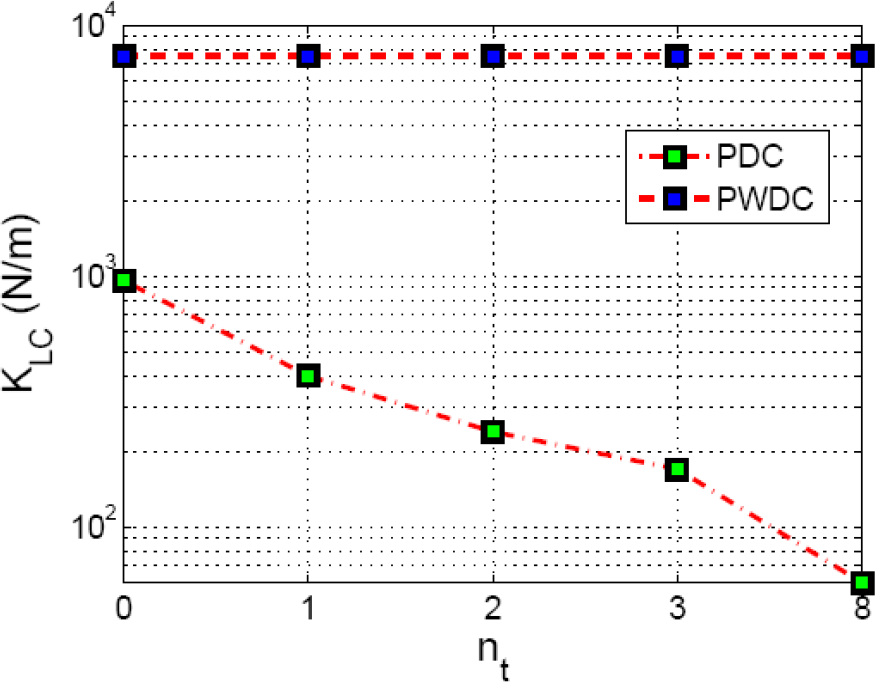
Maximum contact stiffness that can be stably applied to users through distributed multirate control of direct touch without RDPs, when users are connected via power-domain communications (PDC) and via passive wave-domain communications (PWDC), and for various communication delays Td = nt · Tn.

Stability regions for distributed multirate control of direct touch with RDPs over power-domain and passive wave-domain communications, for various communication delays Td = nt · Tn.
3.2.2 Direct Touch with RDPs
Figure 3 depicts the stability regions for distributed multirate control of direct touch with RDPs when users are connected via power-domain communications (PDC) and via passive wave-domain communications (PWDC), and for various communication delays Td = nt · Tn. This figure illustrates that both the RDPs and the passive wave-domain communications make the contact stiffness robust to delay, but only the passive wave-domain communications mitigate the negative impact of delay on the coordination gain. In other words, only the passive wave-domain communications can maintain the synchronization between the two users when the delay increases. The experiments presented in Section 4 will support these analytical results.
3.3 Performance Evaluation of Distributed Multirate Control of Networked Haptic interaction with RDPs and Passive Wave-Domain Communications
This section evaluates the impact of the RDPs and of the passive wave-variable communications on the performance of distributed multirate control of networked haptic interaction via the admittance perceived by a user who manipulates a distributed virtual mass, similarly to (Fotoohi M., Sirouspour S., and Capson D., 2007). Ideally, the user should feel the admittance of a mass. Deviations from the ideal admittance are caused: i) by the delay and the low packet update rate of the communication network; ii) by the physical damping of the haptic devices; and iii) by the distributed controller. The comparative analysis herein aims to determine if the RDPs and the passive wave-domain communications can decrease the deviation of the perceived admittance from the ideal admittance. The analysis considers distributed multirate control without and with RDPs, over power-domain and passive wave-domain communications, and for round trip delays Td = 0.016 s (Figure 4.a) and Td = 0.128 s (Figure 4.b). Table 1 provides the control gains used in the analysis. In this table: KT is the coordination gain that synchronizes the distributed copies of the virtual mass; KRC is the contact stiffness between the SVO and the RDP when RDPs are used. Note that the notation KRC is also used as the contact stiffness between the SVO and the position of the remote peer received over the network when RDPs are not employed. The damping of all contacts and the derivative gains of all coordination controllers are set to 3 Ns/m. At low frequencies, the deviations from the ideal perceived admittance for interactions over power-domain communications are due to physical damping of the devices, the network delay, and limited packet update rate. Such deviations are attributed to the viscous behaviour perceived by users. In addition, larger network delays result in higher viscous damping. However, note that: i) passive wave-domain communications result in perceived admittance closer to the ideal admittance of a pure mass regardless of the value of the network delay; ii) RDPs lead to higher viscous damping being perceived by users at low frequencies – which is to be expected given that the RDPs are considered to have the same viscous damping at the remote haptic interface which they represent. Experiments will be presented in Section 4.2 to validate this performance analysis.
The control gains used to compute the perceived admittance provided by distributed multirate control of haptic interaction without and with RDPs, and via power-domain (PDC) and passive wave-domain (PWDC) communications.

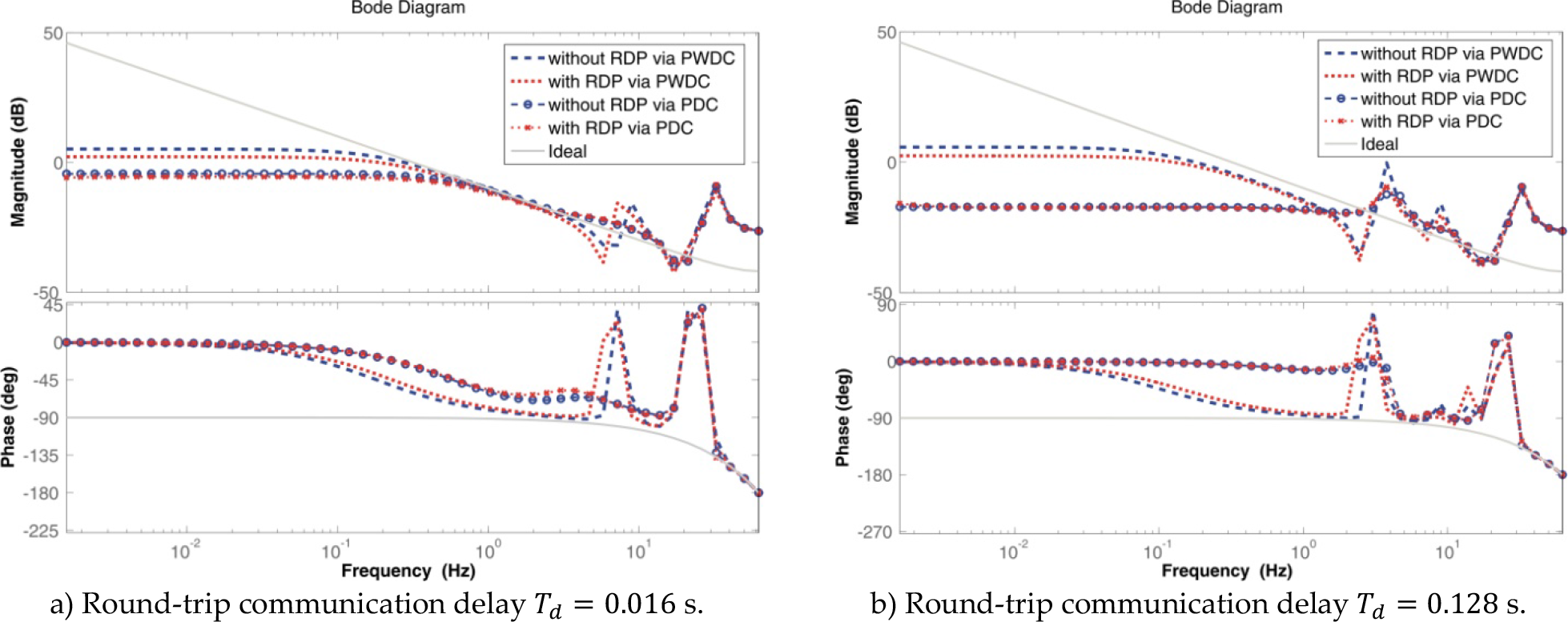
Perceived admittance of a virtual mass for distributed multirate control of haptic interaction cooperation with and without RDPs, and over power-domain (PDC) and passive wave-domain (PWDC) communications.
4. Experiments
This section depicts experiments carried out using a distributed networked haptic system for one degree of freedom (DOF) haptic interaction. To allow meaningful comparison among successive experiments, the users are replaced by forces applied to the haptic devices as commands sent to the servo motors. Note that the elimination of the human hand damping represents a worst case scenario for stability for the given experimental setup, in which two impedance-type haptic devices are used.
The experimental testbed is shown in Figure 5. It comprises two Quanser 6 DOF haptic wands connected to two personal computers running Window XP on an Intel Core 2 Duo CPU at 2.67 GHz with 2 GB RAM. The two computers communicate over a local area network (LAN) via the UDP protocol. The position sensing and force feedback rates for both devices are set to 1 kHz. The network data transmission rate is 125 Hz. In all experiments, proportional-derivative controllers constrain the 6-DOF devices to move only along the horizontal x-direction, parallel to the back wall in Figure 5. In the SVE, the haptic devices are represented as virtual spheres. In the experiments, the damping of all contacts and the derivative gains of all controllers are 3 Ns/m and the wave impedance is b = 5 Ns/m. All experiments start with the two haptic devices at rest and in contact with each other, and with users pushing each other with a constant force equal to 0.1 N. Moreover, the RDPs are simulated using forward Euler integration with fixed step equal to Tc. They have mass mRDP = 0.1 kg and damping bRDP = 0.5 Ns/m.

The experimental haptic testbed.

Experimental direct touch without RDPs, via power-domain and via passive wave-domain communications.

Experimental direct touch with RDPs, via power-domain and via passive wave-domain communications.
4.1 Stability of Direct Touch with RDPs
In the direct touch experiments, Peer 1 applies an additional force equal to 1 N force towards Peer 2 for 25 ms at intervals of 2.5 s. The gains are selected for marginal stability for a round trip network delay Td = 0.016 s, as follows: i) for direct touch without RDPs, KLC = 300 N/m for power-domain communications and KLC = 1000 N/m for passive wave-domain communications; ii) for direct touch with RDPs, KLC = 1000 N/m and KRDP = 300 N/m for power-domain communications and KLC = 1000 N/m and KRDP = 3000 N/m for passive wave-domain communications. Robustness to delay is investigated through experiments performed for a second round trip network Td = 0.128 s.
As predicted analytically, direct touch over power-domain communications becomes unstable when the network delay increases, regardless of whether or not RDPs are employed: users cannot maintain contact, but bounce further and further apart. In contrast, direct touch over passive wave-domain communications remains stable when the network delay increases. Furthermore, the passive wave-domain communications allow much larger coordination gain KRDP to be used for the RDPs and thus, increase the position coherency between the RDPs to the user whom they represent. When direct touch is over passive wave-domain communications, users move less when provided with RDPs, which means that they feel more damping. This is expected because the RDPs introduce additional damping in the haptic system.
4.2 Performance Assessment
The second experiment investigates the effect of RDPs on haptic cooperation over passive wave-domain communications. In this experiment, the two users initially push a SVO with mass 0.4 kg with a force of 0.2 N towards each other along the x-axis. During the experiment, Peer 2 applies an additional sinusoidal force with amplitude 0.3 N and frequency 3 rad/s along the x-axis. The round trip network delay is Td = 0.128 s. The experimental results are shown in Figure 8. Note in this figure that the amplitude of the motion is smaller when RDPs are employed. The smaller amplitude of motion validates that users feel more damping during cooperative manipulations when provided with RDPs. This result is in agreement with the analysis and is expected because the RDPs contribute additional damping to the interaction.

Experimental two-user haptic cooperation with/without remote dynamic proxies (RDPs) via passive wave-domain communications, for round-trip communication delay Td = 0.128 s.
5. Conclusion
This paper has studied the impact of RDPs and passive wave-domain communications on the stability and performance of distributed multirate control of direct touch in networked haptic systems. It has considered communication networks with fixed delay and with packet update rate smaller than the update rate of the users' local force feedback loops. Analysis and experiments have been conducted to demonstrate that: i) RDPs render the user-perceived contact stiffness robust to delay; ii) passive wave-domain communications make both the user-perceived contact stiffness and the SVE coordination gain insensitive to delay. Hence, this work suggests that RDPs are beneficial for distributed networked haptic systems with power-domain communications because they allow stiffer direct contact between users. In distributed networked systems with passive wave-domain communications, the RDPs contribute little to stability and performance. Future work will investigate techniques for ensuring the passivity of wave-domain communications in networks with variable and asymmetric delays.
Footnotes
6. Acknowledgments
This work was supported through an NSERC Discovery Grant.
7. Appendices
1
The networked haptic users exchange position, velocity and force information over power-domain communications. The users transmit wave variables (Niemeyer G., and Slotine J.-J. E., 1991) over wave-domain communications.