
Abstract
In this paper, we introduce a novel tuning procedure to ensure semi-global exponential stability for the classical PID control of rigid robots. This tuning procedure is expressed in terms of conditions which are more relaxed than those proposed previously in the literature. This allows us to perform, for the first time, experimental tests with a classical PID controller ensuring semi-global exponential stability. Finally, we show numerically that previous formal tuning procedures in the literature result in very large controller gains which prohibit the performance of any experimental test.
Introduction
Classical PID control of robot manipulators is still the most common control scheme used in industrial applications because of its simplicity (which is mainly due to the fact that it is a model-free controller), good performance and robustness with respect to disturbances and uncertainties.
However, several features remain unsolved which render its study interesting from the control point of view. One of these open problems is the lack of tuning procedures achieving - simultaneously - stability and good performance. For instance, although several works have claimed semi-global asymptotic stability [1, 2, 3, 4, 5, 6, 7, 8], performances achieved with the resulting tuning procedures are far from acceptable in practice. This motivated the work by Hernández et al. [9] who proposed a tuning procedure formally explaining several very good performances which had been reported previously in the literature.
On the other hand, a similar situation exists for semi-global exponential stability, which has been claimed by Chaillet et al. [10]. However, in this case the problem still remains unsolved: the resulting tuning procedure is so conservative that no experimental test was reported. We stress that the controller gains used in experiments reported by Chaillet et al. [10] have not been verified to satisfy the tuning conditions proposed in that paper to ensure semi-global exponential stability. The tuning procedure proposed in [10] is conservative mainly due to the fact that it is expressed in terms of the smallest and the largest eigenvalues (or norms) of both matrix controller gains and matrix robot parameters. Although this feature allows us to write tuning procedures in terms of simple expressions, this also forces us to compute the controller gains under extreme operating conditions. For instance, a common condition establishes that the smallest proportional gain must dominate the gravity effect of the whole robot [10]. This results in excessively large proportional gains for most joints because the joints close to the robot tip are provided with low torque actuators since they do not need to deal with the gravitational effect of links placed close to the robot base.
In the present paper, we introduce a novel proof for the semi-global exponential stability of classical PID control for rigid robot manipulators. The resulting tuning procedure is expressed as the stability conditions that must be satisfied by each individual controller gain to be used at each robot joint. As a consequence, the number of conditions to check seem to be larger than in previous works in the literature. However, use of a computer program to check the stability conditions easily solves this point. Once this is accomplished, the main advantage of the proposed tuning procedure is clear in experiments: the stability conditions are so relaxed that they allow for the use of suitable controller gains which - importantly - improve the closed-loop system performance. Furthermore, this allows us to perform, for the first time, experiments with a classical PID controller, ensuring semi-global exponential stability. These features represent the main contribution of the present paper.
We would stress that this work is not intended to present an analytical procedure to achieve a specific, prescribed good performance. We just look for the most relaxed stability conditions in the literature for the present control problem guided by the hypothesis that more relaxed stability conditions will allow for the selection of suitable controller gains to achieve a better closed-loop performance. The present paper is intended to prove such a hypothesis for the case of the semi-global exponential stability of classical PID control of robot manipulators. We also stress that this must not be underestimated, since exponential stability is a strong property which is commonly expressed in terms of restrictive conditions. Moreover, recall that exponential stability has important and well known implications: robustness with respect to external disturbances and an exponential rate of convergence are both guaranteed.
The remainder of the paper is organized as follows. In Section 2, we present the robot dynamic model that we consider as well as some useful properties and previous mathematical results. Our main contribution is given in Section 3. Section 5 is devoted to present an experimental test intended to give some insight into the achievable performance. Finally, some concluding remarks are given in Section 6.
Throughout this paper, we use the following notation. Given some vector
Robot Dynamics
The dynamic model of a serial n -link rigid robot is given as [7, 11]

where
Property 1. Considering that matrix

Independently of the way in which

Furthermore, for robots equipped only with revolute joints, there exists a positive constant kc1 such that, for all

Property 2. For robots equipped only with revolute joints, there exists a positive constant k g such that

and

A way to compute kg is:
Furthermore, there exist positive constants k g i such that

Finally, we present some useful results.

If the Hessian matrix (∂/∂

where ξ is a vector on the line segment that pins the vectors

Consider the autonomous system

with initial conditions


∀ t ≥ 0 and
In fact, the positive constants k and Λ of Definition 2 can be computed as follows ([13], pp. 154):
In this section, we present our main contribution. Consider the classical linear PID controller

where Kp, Kv and Ki are diagonal positive definite matrices which represent the proportional, derivative and integral gains, respectively, ω0 is the initial value of ω(t) (ω0 = ω(t0)), and

where α > 0 is a constant scalar, and Kp’ and Ki’ are diagonal positive definite matrices. Using (4), we can rewrite control law (3) as

From (1), (4) and (5), we can obtain the following closed-loop system equation:

It is easy to prove that

where

Function V in (7) is positive definite and radially unbounded if (see Appendix A)




are satisfied for some α > 0, β > 0 and K'i, or equivalently Ki for some positive definite matrix. Furthermore, in Appendix A (see (28) and (29)) it is also shown that there exist two positive constants α1 and α2 such that
After some algebraic manipulation, including the use of Property 1, we can show that the time derivative of the Lyapunov function candidate in (7) along the trajectories of the closed-loop system (6) is given by
Define
where α3 = Λmin{Q} and matrix Q are defined in (30) Appendix B. Moreover, it is also shown in Appendix B that Q is positive definite if

where Kvρ and Kvσ are some diagonal positive definite matrices, such that K v = Kvρ + Kvσ and

i = 1, …, n.
Thus, according to Theorem 3, we can conclude that the equilibrium point

where α1, α2 and α3 are given by (28), (29) and (14), respectively. This completes the proof of Proposition 1.
where
On the other hand, considering the stability conditions (9)–(17) in the present paper and neglecting those dependent terms of α and β (which are constants that have to be suitably tuned), we have it such that the proportional gain must fulfil at least

which is a much more relaxed condition than (19). As will be shown in Section 5, condition (19) is too restrictive to carry out experimental tests, whereas the conditions in (20) are so relaxed that they allow us in the present paper to perform, for the first time, experimental tests with a classical PID controller ensuring semi-global exponential stability (see Section 5).
An estimate of the domain of attraction Ω c ⊂ D can be computed as (Khalil [13], p. 317)
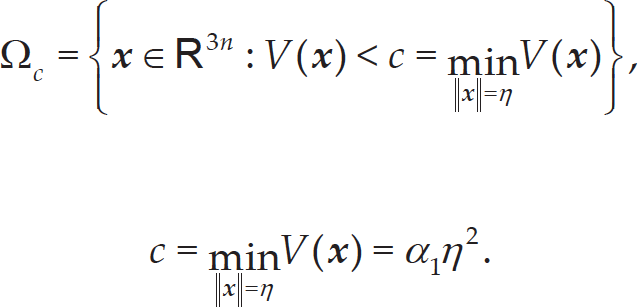
A more conservative estimate of the domain of attraction Ω
r
, represented by a ball of radius r, can be determined by bounding
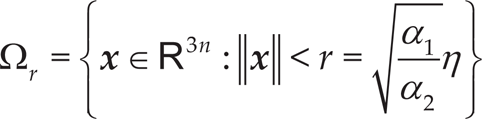

The upper bound in (22) grows as Kp and Kv grow, and Ki decreases if the ratio Λmin{Kp}/Λmax[Kp} is kept constant. Thus, there always exist diagonal positive definite matrices Kp, Kv and Ki such that the radius of the domain of attraction r in (21) can be enlarged arbitrarily. This completes the proof of Proposition 2.
The following is a tuning procedure that ensures semi-global exponential stability, i.e., conditions (9), (10), (11), (12), (15), (16) and (17) are all satisfied and the radius of the domain of attraction Ω r , given in (21), can be enlarged arbitrarily:
Propose positive values for η, α and β (select a small enough value for β to obtain more relaxed stability conditions).
Find Kvρ as a diagonal matrix such that its diagonal elements kvρi satisfy (15).
Choose Λmin{Kvσ}, such that
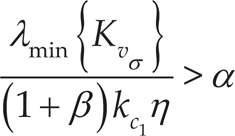
and, by computing K v = Kvσ + Kvρ, that (9) and (11) are satisfied.
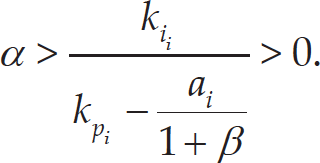
Propose Ki as a diagonal matrix such that its diagonal elements k ii satisfy (16).
Choose Kp as a diagonal matrix whose elements kpi satisfy (10), (12) and
Using (28)–(29), compute the radius of the domain of attraction as
If r is not large enough, propose a larger value for η and follow one of the following options until the desired r is obtained
Keep α without change and repeat (iii), (v), (vi) and (vii). Choose a smaller value for β if necessary.
Go to step (iii) and, using Λmin{Kvσ}, compute a new value for α. Repeat steps (ii), (iv)–(vii). Choose a smaller value for β if necessary.
Trial and error is an empirical method for PID control tuning. This method is very attractive for designers because it allows for the selection of the controller gains without performing computations. In the following, we present the fundamentals and disadvantages of this method in order to compare with our proposal in the experiments section. According to an empirical method, the PID controller gains can be selected following the below steps: [15]
The integral and derivative gains are set to zero and the proportional gain is increased. This renders the response more quickly but, at the same time, the oscillations increase.
Once the proportional gain has been set to obtain a desired fast response, the derivative gain is increased to stop oscillations. We do not increase the derivative gain too much since this renders the closed-loop system very sensitive to noise. Increasing the derivative gain also renders the system response more slowly. Thus, we repeat this step and the previous one until a fast and well-damped response is obtained.
Increase the integral gain. This reduces the steady state error and the settling time, but it also increases system oscillations.
Repeat all of the above steps until a zero steady state error is obtained, with a fast and well-damped response.
Although the above method is an empirical method that is not intended to check any stability condition, the stability of the trial and error method can be understood as follows. The closed-loop dynamics of a single rotative body with inertia J, which is subject to the action of a linear spring, with a stiffness constant K, and a PID controller, is given as

where
The third condition explains why increasing Ki results in oscillations (or even instability), which can be reduced increasing Kd and, also, Kp. Note that in the case of a conventional linear spring, K > 0. However, K may become negative in a nonlinear mechanism. This happens, for instance, in a simple pendulum when operating in the inverted configuration. There, any position deviation (the spring deformation) from the inverted configuration produces a gravity torque (the nonlinear spring) which increases (rather than decreases) such a deviation (spring deformation) from the inverted configuration. This means that the gravity is equivalent to a spring with a negative stiffness constant when operating in the inverted configuration. It is very important to point out this phenomenon because, according to the third condition above, a PID controller which has been tuned by trial and error in the bottom stable configuration may become unstable in the inverted configuration. This kind of problem motivates formal studies such as the one in the present paper. The idea is to find tuning procedures which ensure stability in a well-defined domain of attraction. These procedures select controller gains which satisfy some conditions which take into account the worst cases in such a domain of attraction.
Finally, we want to stress an important difference of our proposal with respect to empirical methods. We provide a tuning procedure which not only achieves good performance but, at the same time, also ensures stability. Thus, our contribution is that our tuning procedure achieves the best performance among the tuning procedures in the literature which are provided with a formal semi-global exponential stability proof.
Experimental Results
In this section, we present four experimental tests intended to give some insight into the performance achievable using the stability conditions obtained in this paper. We have used the CICESE robot located at the Automatic Control Laboratory of the Instituto Tecnológico de La Laguna as an experimental platform (see Fig. 1). The CICESE robot is a two-DOF robot manipulator with two revolute joints whose dynamic model has been presented previously in the literature [6, 16]. The CICESE robot is equipped with Yokogawa servo actuators DM1200-A and DM1200-B for the shoulder and elbow joints, respectively. These servos are operated in torque mode and they accept an analogue voltage as a reference of the torque signal. The control algorithm is programmed in a personal computer with the software Win-Mech-Lab [17]. The sample period is fixed to 2.5 [ms]. Some useful parameters of the CICESE robot are shown in Table 1.

CICESE robot
Numerical values of some useful parameters of the CICESE robot

In this experimental test, we have used

These gains have been obtained by using α = 0.938, β = 0.0001, η = 46.3, which results in r = 0.6508 and ∥

Position errors and torques obtained in Experimental Test 1
The main reason for this experimental test is to compare the performance achievable with the tuning procedure in Section 3.3 of the present paper with the performance achievable by an empirical tuning procedure. Hence, the desired position and initial conditions in this experiment are the same as those used in Experimental Test 1. We have used the following controller gains,

which have been selected using the trial and error empirical method described in Section 4. These controller gains were found to achieve the best performance. The position errors and torques obtained in this experimental test are shown in Fig. 3.

Position errors and torques obtained in Experimental Test 2
We realize that a quicker response is obtained with the trial and error empirical tuning procedure. In this respect, we would stress that it is common to find in the literature that formal tuning procedures achieve inferior performance compared to empirical tuning procedures. This problem has its roots in the well-known mathematical limitation that nonlinear systems do not have a general analytical solution. Hence, the mathematical tools used to formally prove stability in nonlinear systems only establish sufficient conditions. This means that there exist controller gains which, although not formally ensuring stability, achieve a stable response in practice. Moreover, these gains can be chosen without any restriction because they are selected without ensuring stability. This explains why empirical tuning methods perform better than formally established tuning methods in nonlinear systems. This is why we stress that our formal tuning procedure achieves the best performance among tuning procedures in the literature provided with a semi-global exponential stability proof. Moreover, our tuning procedure achieves an approximate settling time of five seconds (see Fig. 2) whereas the empirical tuning procedure achieves a one-second settling time in Fig. 3. We think that such a difference is not too large if we consider that exponential stability is formally proven for the results in Fig. 2.
In order to test the controller gains (24) in an unstable robot configuration, consider the top position for both links as the desired position, i.e.,
In order to compare the performance with that obtained with the controller gains in (25), in Fig. 5 we present the robot response (Test 4) when using (25) and the same desired position and initial conditions as in Fig. 4.

Position errors and torques obtained in Experimental Test 3
We realize that the performance obtained with both tuning procedures deteriorates in Figs. 4 and 5. However, it can be seen that such a deterioration is more evident for the empirical tuning procedure. This can be concluded by comparing Figs. 5 and 3: the settling time has increased about 12-fold, i.e., from one second to about 12 seconds, and the error peak value has increased to about 0.15[rad]. On the other hand, when using the tuning procedure proposed in the present paper, we have to compare Figs. 2 and 4: the settling time has increased by about 2.4 times, i.e., from five seconds to 12 seconds, and the error peak value has increased to about 0.3[rad]. This last feature means that the formal tuning procedure introduced in the present paper is more robust in the sense that a less oscillatory response is obtained. This implies that the system remains more stable.

Position errors and torques obtained in Experimental Test 4
On the other hand, we have already pointed out that a tuning procedure has been proposed by Chaillet et al. [10] which it is claimed ensures semi-global exponential stability. However, as was already explained at the end of Section 3.1, such a tuning procedure is very conservative. As a matter of fact, it should be said that, using (19) and k given in Table 1 in the present paper, we find that the proportional gain matrix allowed by the tuning procedure of Chaillet et al. [10, 14] must satisfy Λ
min
(Kp)>970.53 at least, since several other terms have to be added to this value (those terms dependent on
We have presented a formal proof for the semi-global exponential stability of robot manipulators when using linear classical PID control. From this stability proof, we have proposed a novel tuning procedure which is stated in terms of such relaxed stability conditions that we have succeeded, for the first time, in performing an experimental test with a classical PID controller ensuring semi-global exponential stability. We have observed, in this experimental test, that the achieved performance is good enough for practical applications. An experimental comparison with empirical tuning methods is also included. Finally, a numerical comparison is presented whereby it is shown that the formal stability conditions presented previously in the literature are too restrictive to be used in practical applications.