
Abstract
This paper presents an iterative learning control (ILC) strategy to resolve the trajectory tracking problem of wheeled mobile robots (WMRs) based on dynamic model. In the previous study of WMRs’ trajectory tracking, ILC was usually applied to the kinematical model of WMRs with the assumption that desired velocity can be tracked immediately. However, this assumption cannot be realized in the real world at all. The kinematic and dynamic models of WMRs are deduced in this chapter, and a novel combination of D-type ILC algorithm and dynamic model of WMR with random bounded disturbances are presented. To analyze the convergence of the algorithm, the method of contracting mapping, which shows that the designed controller can make the velocity tracking errors converge to zero completely when the iteration times tend to infinite, is adopted. Simulation results show the effectiveness of D-type ILC in the trajectory tracking problem of WMRs, demonstrating the effectiveness and robustness of the algorithm in the condition of random bounded disturbance. A comparative study conducted between D-type ILC and compound cosine function neural network (NN) controller also demonstrates the effectiveness of the ILC strategy.
1. Introduction
Nowadays, wheeled mobile robots (WMRs) are treated as a substitute in almost every industry, which can be used in the industrial environment for the transportation of materials, inspection and operation for their intelligence, efficiency, flexibility, and predictability. Trajectory tracking is one of the most important problems of WMR. Unlike the path following problem, the trajectory tracking problem not only has the spatial position requirements, but also has velocity requirements, that is, to require the WMR reaching a specific location with specific velocity. Over the past decade, many meaningful research results in this field have emerged. Two kinds of models, that is, kinematical model and dynamic model, were established, and some control strategies, for example, backstepping control [1], sliding mode control [2, 3], adaptive control [4, 5], fuzzy control [6, 7], neural network (NN) control [8, 9], were proposed. Aiming at a class of WMRs, which usually have the repeated tasks, i.e. relatively fixed trajectory, iterative learning control (ILC), which have the property of improving the tracking performance by iteration in a fixed time interval, can be applied to the WMR trajectory tracking problem. After more than three decades’ development, ILC algorithm has been a branch of intelligent control with well-established mathematical description and stability proof, which can handle nonlinear and strong coupling systems in a very simple way and low cost [10–12]. Now, the ILC has made tremendous progress in the learning law, convergence, robustness, learning speed, and application, which has been used in industrial robots, rotary systems, heat treat, chemical production processes, and so on [10]. Paper [13] proposed a simultaneous iterative learning control and dynamic model (SILCDM) approach, which combined ILC method and iterative learning parameter estimation algorithm for unknown nonlinear system. Based on the data-driven method, the unknown parameters can be identified and better control performance can be achieved, but the SILCDM algorithm is complicated and difficult to be realized. The combinations of optimal control theory and ILC become more and more popular, and paper [14] used optimal control to design learning gain for more rapid convergence speed and better robust performance, process disturbances, and measurement noise. However, the algorithm needed large memory space and huge amount of calculation.
In general, the WMRs for industry application always do the same task and move on the desired trajectories. For example, some WMRs, which inspect the state of electrical equipments and collect data automatically in transformer substation, must patrol along the designed route repeatedly. So, the WMR trajectory tracking problem using ILC has received more attention. Early research about ILC and nonholonomic mobile robot was presented in the literature [15–17]. Paper [15] presented an iterative learning controller applied to nonholonomic mobile robots, which can be put in chained form, and the control scheme can obtain nice convergence and robustness properties with respect to modeling inaccuracies as well as disturbances. An ILC technique for path-tracking control for an omni-directional vehicle was proposed in paper [16]. A practical ILC updating law was designed to improve the path following accuracy for an omni-directional mobile robot in reference [17]. The discrete kinematical model of two WMRs was established in literature [18], and an ILC was applied to implement trajectory tracking for WMR. Paper [19] proposed an ILC algorithm with the analysis of convergence for kinematical model of farm mobile robots. An improved ILC strategy was developed for path-tracking control of a nonholonomic mobile robot in paper [20]. In [21], an ILC law with predictive, current, and past-learning items to solve the high-precision trajectory tracking issue of WMR was designed. A D-type iterative learning controller for WMR, which can track the desired velocity trajectory asymptotically after a few times of iterations, was proposed in paper [22].
From the literature review mentioned above, ILC has been less investigated in WMR dynamic model for tracking control. In fact, dynamic model of WMRs is more appropriate to real robots than kinematic model. In the literatures [15–21], there is an assumption that the velocities (such as linear velocity and angular velocity) of WMR are ideal. Furthermore, the ideal velocities can track desired velocities immediately and without error, which cannot realize in the real world. In Ref. [22], only the ideal situation and the WMR trajectory tracking without any disturbance are considered, and the convergence of controller in the presence of the bounded disturbance was not proved. Hence, in this chapter, ILC is proposed to work with the dynamic model of WMRs in the presence of the bounded disturbances. The main characteristics of the proposed D-type ILC with the application to WMR dynamic model are highlighted as follows:
A D-type ILC algorithm is incorporated into the WMR dynamic model to improve the tracking performance of the control system. The controller works directly on the dynamic model, which is more appropriate than kinematical model. The control law does not need any prior knowledge of WMR, making it simple to be realized.
The convergence of the proposed algorithm using contracting mapping theory can be established. The controller can drive the velocity tracking errors to converge to zero rapidly with or without disturbances. The tracking performances with and without disturbances are presented and compared. Simulation studies verify the convergence and effectiveness of the algorithm in the presence of the random bounded disturbances. A comparative study conducted between D-type ILC and compound cosine function NN controller demonstrates the satisfactory performance of the ILC strategy.
This chapter is organized as follows. In Section 2, the kinematical and dynamic models of WMR are described. In Section 3, the D-type iterative learning controller is derived, and the convergence of the designed controller is proved by the contracting mapping theory. Simulation results are presented in Section 4. Finally, conclusions are given in Section 5.
2. Kinematical and Dynamic Model of WMR
A typical two WMRs are shown in Figure 1. This WMR has two independent driving wheels on the same axis and can move in the coordinate system for the inertial frame
Suppose that the contact of driving wheels and ground only exists “pure rolling without sliding,” the model of two WMRs can be simplified as unicycle-type mobile robot. The nonholonomic constrains of the WMR, which imply that the robot cannot move sideways, can be expressed as:

Eq. (1) can be rewritten as:

where
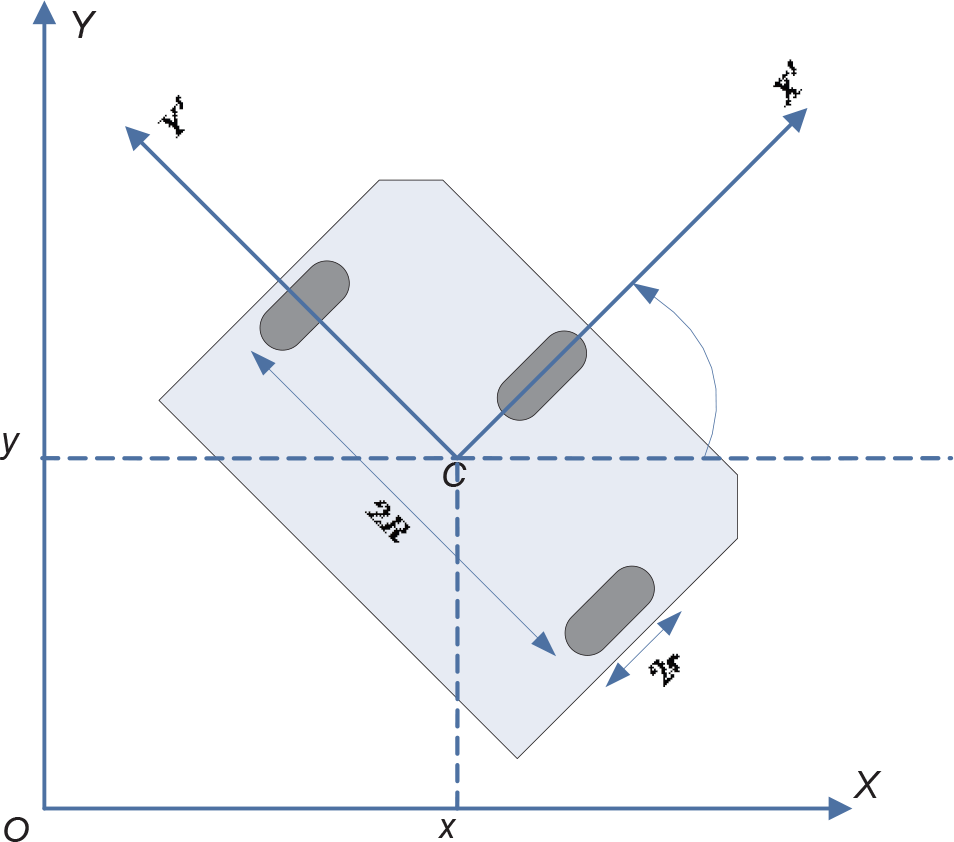
Two-wheeled mobile robot
The linear and angular velocities of WMR in point C are defined as υ and ω, respectively. The kinematical model of WMR can be described as follows:

Eq. (1) can be rewritten as follows:

where
According to the Eular-Lagrangian formulation, the dynamic model of WMR is given as follows:

where
When the WMR moves on the plane, its potential remains constant. Considering the WMR mass m and the moment of inertia of WMR I, and ignoring the moment inertia of wheels, the total kinetic energy is

To eliminate the Lagrange multiplier in Eq. (6), the derivative of Eq. (4) can be expressed as:

Substituting Eq. (7) into Eq. (6) and multiplying by

where
Defining

Furthermore, the upper formulation can be written as follows:

where
3. Iteration Learning Controller Design
In the iteration learning control system, the dynamic model of WMR can be written as follows:

where
The tracking problem of WMR is what this chapter considers, so the control goal is to design a suitable control law to make the state trajectory
Now, we can state the following results.
Theorem 1. Aiming at the control system described in Eq. (11), the control law is chosen as follows:

where
If the system satisfies the following conditions:
initial state
then the system iteration output
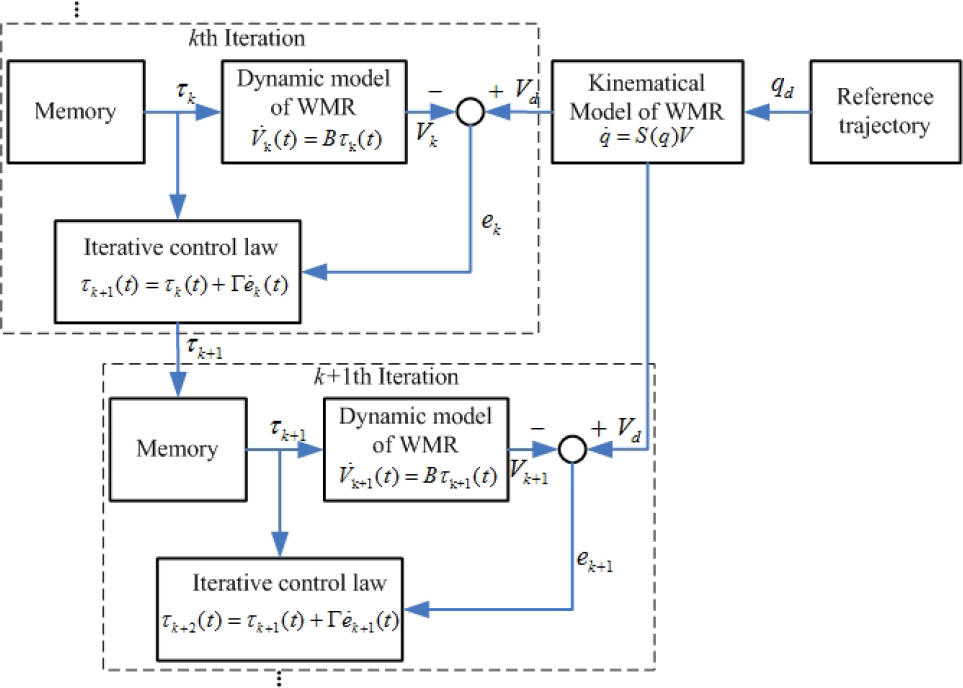
Block diagram of ILC for WMR
Remark 1. The D-type iterative learning controller described in Eq. (12) does not use any parameter of WMR dynamic model, so the control law does not need any prior knowledge of WMR. The only parameter in Eq. (12) is gain matrix Γ, which can begin with very small value to satisfy the condition (1) and then increase slowly for better convergence performance.
Remark 2. In Eq. (12),
Proof. See Proof 1 in Appendix.
In actual WMR system, disturbances such as measurement noise and input disturbances are always inevitable. Usually, the disturbances are random bounded signals. So, it is necessary to verify the convergence of controller in the situation of random bounded signal

We will state the following results and then give the proof.
Theorem 2. Aiming at the control system described in Eq. (13), the control law is chosen as in Eq. (12).
If the system satisfies the following assumptions:
initial state
the difference of
then the velocity trajectory error
Proof. See Proof 2 in Appendix.
Remark 3. In real WMR, disturbance signals are usually random and bounded, so the assumption (3) is reasonable, and the assumption (4) can be concluded by the assumption (3).
4. Simulation Study
To demonstrate the effectiveness of the D-type ILC algorithm, Matlab/Simulink is used for the numerical simulation. Parameters of WMR are as follows:
In this simulation example, the desired velocity trajectories are described by
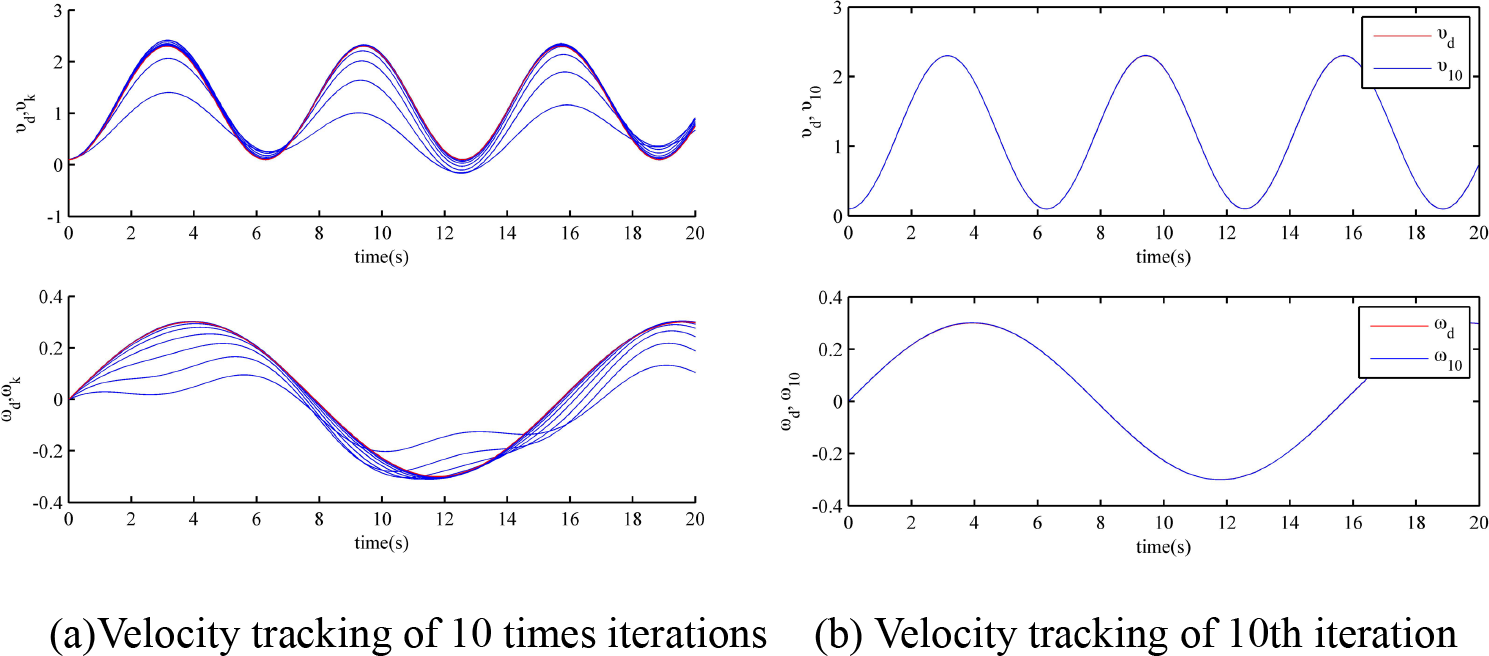
Velocity tracking without disturbances

The convergence of tracking errors without disturbances
After 10 times iterations over the time interval
To further verify the validity of the control law for the velocity tracking of WMR, the random bounded disturbances, which always exist in practice, are considered in the next simulation. The disturbance is given as

Velocity tracking with disturbances

The convergence of tracking errors with disturbances
By comparing Figures 3 and 5, we can find that the tracking performance of first few times in the condition of random bounded disturbance is not as good as the tracking performance without disturbance. However, it can be seen from Figure 5(b) that the actual velocity curve almost overlaps the desired velocity curve, which means that the velocity tracking performance is acceptable. Figure 6(a) shows that the maximum absolute values of tracking errors are larger than the errors shown in Figure 4(a), but the errors with disturbance can decrease rapidly and converge to a region around zero. The squared tracking errors integrated over iteration period with random disturbance converge rapidly with the increase in iteration index, which is shown in Figure 6(b). So, the simulation results in Figures 5 and 6 reveal the effectiveness and robustness of D-type ILC algorithm in the velocity tracking of WMR with random bounded disturbance.
To demonstrate the effectiveness of the ILC strategy, a comparative study was conducted between D-type ILC and compound cosine function NN controller proposed in the literature [9]. The desired velocity trajectory, D-type ILC controller, system parameters, and disturbances are same in this comparative study. The compound cosine function NN controller is designed as follows:

where

The network weight value update law is in the following:

In the simulation as shown in Figures 7 and 8, the parameters of NN controllers are chosen as: the number of neurons in hidden layer

The comparison of velocity trajectory tracking performances between D-type ILC and compound cosine function NN controller
In Figure 7(a), red, blue, and green curves denote desired velocity trajectory, velocity trajectory of 10th iteration using D-type ILC, and velocity trajectory of compound cosine function NN method, respectively. The linear velocity and angular velocity curves using ILC almost overlap the desired velocity curves. However, the linear velocity trajectory using NN method cannot accurately track the desired linear velocity trajectory, and there is obvious difference between the angular velocity trajectory using NN method and the desired angular velocity trajectory in the first 8 seconds. To further show the difference of tracking performance between two methods, the velocity tracking errors are shown in Figure 7(b). The linear velocity and angular velocity tracking errors using ILC method are close to zero in No. 10 iteration, and the velocity tracking errors using NN method are larger than that of ILC.

The comparison of velocity tracking errors with different disturbances
Figure 8 shows the variation in velocity tracking errors when the amplitudes of disturbances are changed. In the simulation, three kinds of disturbances are set as
5. Conclusion
In this chapter, a D-type ILC algorithm for WMR velocity tracking control is proposed. The kinematical and dynamic models of two WMRs are first established, and then the D-type ILC strategy is designed. The theory of contraction mapping and λ-norm are used to prove the convergence of control law in the velocity tracking, and the proof also shows that if the control law satisfies four assumptions in Theorem 2, the tracking errors will converge to zero when iteration times tend to infinite under the condition of random bounded disturbances. The simulation results verify the effectiveness and convergence of the control law in two kinds of conditions. Moreover, the comparison of ILC and compound cosine function NN controller also shows the excellent tracking performance of ILC. In conclusion, the D-type ILC algorithm can be used for the velocity tracking of WMR, which moves on desired trajectory repeatedly.
Footnotes
6. Acknowledgements
The authors thank the anonymous reviewers for useful comments that improved the quality of this chapter. This work is partially supported by National Science Foundation of China under grant no. 61374100, Natural Science Foundation of Jiangsu Province under grant no. BK20131136, and Open Foundation of Jiangsu Key Laboratory of Power Transmission & Distribution Equipment Technology under grant no. 2015JSSPD06. This article is a revised and expanded version of a paper entitled Tracking control of wheeled mobile robots using iterative learning controller presented at 15th International Conference on Control, Automation and Systems (ICCAS), Busan, 2015.
8. Appendix
Proof 1.
λ-norm will be used in the proof of convergence, which is defined as follows:
where
Define
Using Eq. (17), the state error
Define control input error
Taking norm for both sides of Eq. (19), and according the condition (1)
Eq. (20) can lead to
Taking norm for both sides of Eq. (18) and multiplying by
that is,
Proof 2.
According to the dynamic model of WMR Eq.(13), we have:
Define the velocity tracking errors in No.
Taking norm for both sides of Eq. (24), we can obtain:
Multiplying by
where
When λ is large enough,
When k tends to infinite,