
Abstract
Purpose:
The aim of this study was to estimate the mechanical properties (elasticity) of normal and cancer prostate tissues and to develop a tissue elasticity map for the diagnosis and localization of prostate cancer.
Materials and Methods:
A total of 735 sites from 35 radical prostatectomy specimens were used in the experiments using a robotic palpation system, and the elasticities of the specimens were estimated by a tissue characterization algorithm. The estimated elasticities from 21 regions were separated into normal and cancer tissues using the pathological information, and a tissue elasticity map was developed using numerical functions and a nonlinear surface-fitting method.
Results:
The mean elastic moduli of the normal and cancer tissues were 15.25 ± 5.88 and 28.80 ± 11.20 kPa, respectively. The base region had the highest elasticity, followed by the medial and apex regions. These results demonstrated the ability to separate the cancer tissue from the normal tissue based on its elastic modulus. The tissue elasticity mapping was carried out using the estimated elasticity and nonlinear surface fitting. The proposed map showed the elasticity and was used to estimate the elastic modulus of the prostate at any given region.
Conclusion:
Tissue elasticity may be an important indicator of prostate cancer because the pathologic changes alter the tissue properties, including cell integrity and intercellular matrix. This work provides quantitative and objective information for the diagnosis of prostate cancer. In addition, these results may have implications for the localization of prostate cancers.
Introduction
Robotic palpation systems are aimed at precisely inducing mechanical loading to tissues and recording the biological tissue behavior. Several researchers have investigated the robotic palpation, and have developed the systems for the acquisition of elasticity and presentation of the information to physicians. 14 –16 The systems could represent the information obtained by providing tactile and kinesthetic sensation to the user. Even if the tissue behavior can be measured, the problem of producing quantitative and objective results still has to be confronted. One of the possible approaches is the characterization of biological tissues. 17 Using this method, the quantitative and objective results can be obtained.
In our study, ex vivo experiments on human prostates were carried out at 21 sites across the posterior surface of the specimens. The mechanical property (elasticity) of the tissues was estimated using the experimental results and the Hertz-Sneddon equation. 18 The obtained elasticity data were compared with the pathologic findings, and the tissue elasticity map was developed with a nonlinear surface fitting using the estimated elastic modulus and numerical functions.
Materials and Methods
Robotic palpation system
The palpation system was developed to measure the tissue behavior against mechanical loadings. 19 For clinical applications, the system dimension, operation range, and force-sensing resolution should be taken into account. The system was designed to have an 8-mm maximum outer diameter and a 150-mm length. The physicians induced deformations of several millimeters onto the tissues by the system. To measure the tissue behavior accurately, we used a high-accuracy force transducer whose resolution was <5 mN. Figure 1 shows the design details and the developed system. The system is composed of a hemisphere-tip (2-mm diameter) probe (Misumi), a force transducer (Kistler Instrument), two moving shafts, a screw, a micro DC motor (Maxon Precision motors), a motor key, a motor key holder, a linear position sensor (magneto-resistive sensor and magnetic bar; Piezo-tech), several housings, and a connector. When the motor is operated, the system moves as shown in Figure 1b. The system is manipulated within a range of 8 mm at a maximum velocity up to 3 mm/seconds with <30 μm of motion error. During the operation of the system, the reaction force as a measure of tissue behavior is measured by a force transducer and recorded with the controller. The developed system is attached to a link system, as shown in Figure 1d.
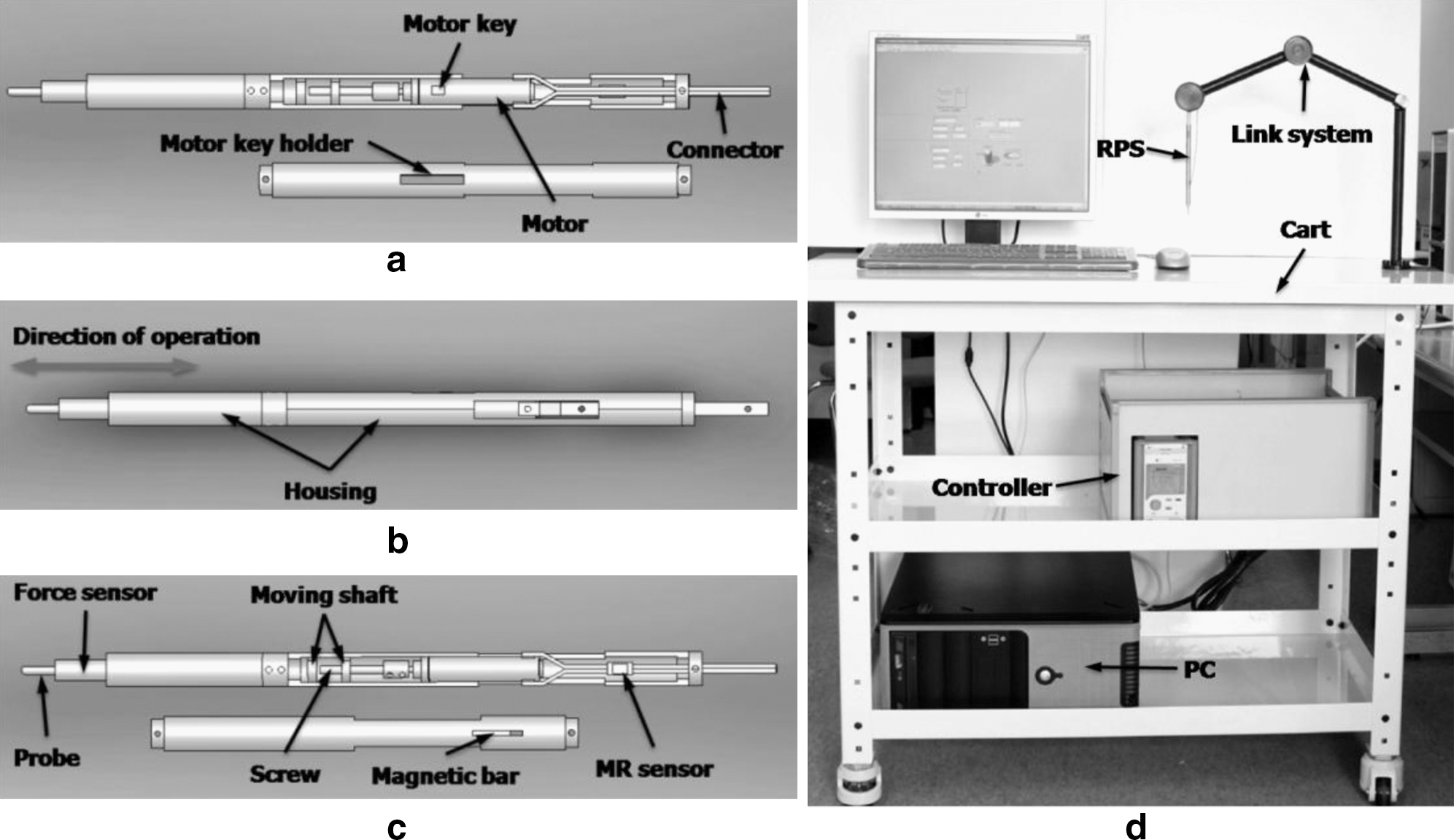
Robotic palpation system: design details of
Human organ preparation
All patients provided written informed consent, and the study was approved by the Institutional Review Board of Severance Hospital. Prostate specimens were obtained from 41 patients who had undergone radical prostatectomy at Severance Hospital, Yonsei University in Seoul, Korea, between August 2009 and December 2009. Patients who had received preoperative hormonal/radiation therapy or prostate-related surgery were excluded from the study. Patients with clinically insignificant small cancer (<0.5 mL) were also excluded from the study. Thirty-five prostate specimens out of 41 patients were eligible for analysis. The mean age of patients was 63.9 ± 7.9 years (range 42–76 years), and the mean PSA level was 9.5 ± 8.7 ng/mL. The mean preoperative volume of prostates was 44.7 ± 19.6 mL (range, 20.1–110.0 mL). The prostate cancer specimens were divided into the pathologic findings. 20 The clinical stage of the prostate cancer obtained with this system was T1c in 20 patients; T2a in 4 patients; T2b in 3 patients; T2c in 3 patients; T3b in 1 patient, and T3c in 2 patients.
Experiments
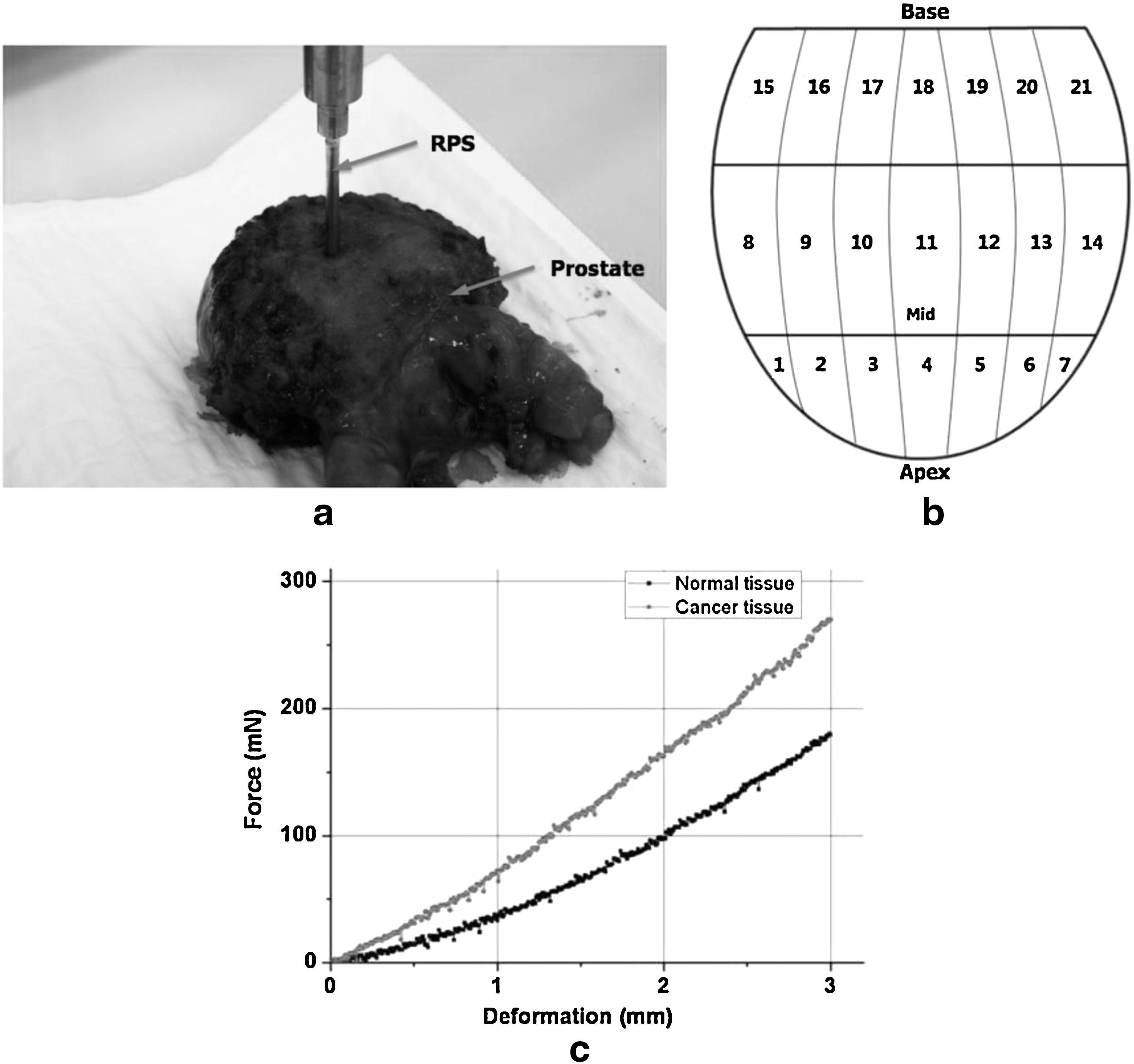
Mechanical experiments were carried out on resected human prostates (Fig. 2a) and the palpation system was used to measure the tissue behavior against mechanical loadings. 19 The investigator who performed the experiments was blind to the clinical data. The clinical expert as an investigator determined the divided sites of specimens and carried out the experiments. The experiment consisted of the following steps. First, the probe tip was placed in contact with the posterior surface of the prostate. Then the tissue was indented at a rate of 1 mm/second to produce the deformation. When the deformation was induced, a reaction force occurred. This reaction force from indented tissues was measured by a force sensor. In these experiments, we used a probe whose diameter is 2 mm, and 3 mm depth deformation was induced to the specimens. Finally, the reaction force and deformation data were acquired with a data acquisition system. The experiments were performed within 30 minutes after extraction of the specimen in the operating room. The indentation experiment was performed at 21 sites across the posterior surface for each prostate specimen as shown in Figure 2a and b. A total of 735 indentations were performed on the 35 specimens.
Ex vivo experiment:
Mechanical property estimation
Elasticity of the tissue was presented as the elastic modulus (Young's modulus, E). For normal palpation, uniform deformation and friction-free contact were assumed to permit sliding of the tissue across the indenter surface. If the indenter contacted completely with the tissue, the Hertz-Sneddon equation (1) can be applied to estimate the elastic modulus of the biological tissues based on the experimental results.
18
Therefore, we estimated the elastic modulus of the prostate using the experimental results and the equation, where E is the elastic modulus, R is the radius of the probe (1 mm), δz
is the indentation depth (3 mm), f
z is the measured force, and υ is the Poisson's ratio (an incompressible material is about 0.499.).
17,19
Histological examination
After the experiments were completed, the specimens were sent to the pathology department for histological examination at Severance Hospital. All specimens were fixed in formalin and then embedded in paraffin. The specimens were then stained with hematoxylin–eosin and examined using an optical microscope, and were analyzed by a single pathologist who was blinded to the results of mechanical testing. The location and size of the cancer tissues were documented for all sections.
Statistical analysis
The elastic moduli were presented as mean ± standard deviation in kPa. The two samples independent t-test was used to assess the elasticity differences between the cancer and normal tissues. SPSS version 12.0 (SPSS) was used to perform statistical analyses.
Mechanical property mapping
The tissue elasticity map can be applied for diagnosis of prostate cancers with comparison between the measured property from the experiments and estimated property with this map. Thus, we performed the three-dimensional nonlinear surface fitting in MATLAB (Mathworks) using the estimated elasticity of the prostate. In the fitting, we assumed that the organ is a continuum and has 20 mm lateral size from the center and 40 mm vertical size from the base. In addition, the nonlinear Gaussian cumulative function and two-dimensional parabola function for normal and cancer tissues were used to develop the map with the forms
where, ENormal and ECancer are the elastic moduli of the normal and cancer tissues, respectively. PH and PV are the target position of the horizontal direction at the center and vertical direction at the base end of the organ. ENormal ,0, ECancer ,0, A, B, C, D, α, β, γ, δ, ɛ, a, b, c, and d are the mapping parameters. To obtain the best fitted parameters of the functions, the Levenberg-Marquardt method was applied. 17 If the parameters are estimated, the elastic modulus of tissues at the measured positions can be obtained.
Results
Typical experimental results on the human prostate tissues are presented in Figure 2c. Overall elastic moduli of 735 regions were obtained from the experimental results and Hertz-Sneddon equation. The results obtained from mechanical property experiment were compared with the histopathological results obtained from the pathologist. In the histopathological examination, 269 regions of 35 prostate specimens included the cancer tissues. Cancer tissues were located most frequently at the base of prostate (50.9%), followed by the mid-gland (32.4%) and then the apex of the prostate (16.7%).
The mean elastic moduli of the normal and cancer tissues were 15.25 ± 5.88 and 28.80 ± 11.20 kPa (p = 0.000), respectively. For more effective statistical analysis, we assume that the right and left sides of prostates have similar characteristics. Although experiments were performed at 21 regions, the elastic moduli of right and left sides were not statistically and clinically different, and the data of the right side were included in those of the left side such as (1 = 7, 2 = 6, 3 = 5, 4, 8 = 14, 9 = 13, 10 = 12, 11, 15 = 21, 16 = 20, 17 = 19, and 18). In the normal tissue regions, region 17 (21.40 kPa) demonstrated the highest elastic modulus and region 1 (9.82 kPa) showed the lowest property. In the cancer tissue regions, the highest elastic modulus was region 16 (36.47 kPa) and the lowest was region 1 (15.85 kPa). In addition, the elastic moduli of normal and cancer tissues are different from the t-test results (p = 0.000). These results indicate that the cancer tissue has a harder property than the normal tissue for all regions. Furthermore, the results confirm the ability to differentiate cancer tissues from normal tissues based on its elastic modulus. The obtained elastic moduli and t-test results are presented in Figure 3 and Table 1. The tissue elasticity mapping was carried out using the estimated elasticity and nonlinear surface fitting. In the mapping, the parameters of numerical functions on the elasticity were obtained as shown in Table 2, and the fitted surfaces of the tissue elasticity are shown in Figure 4.
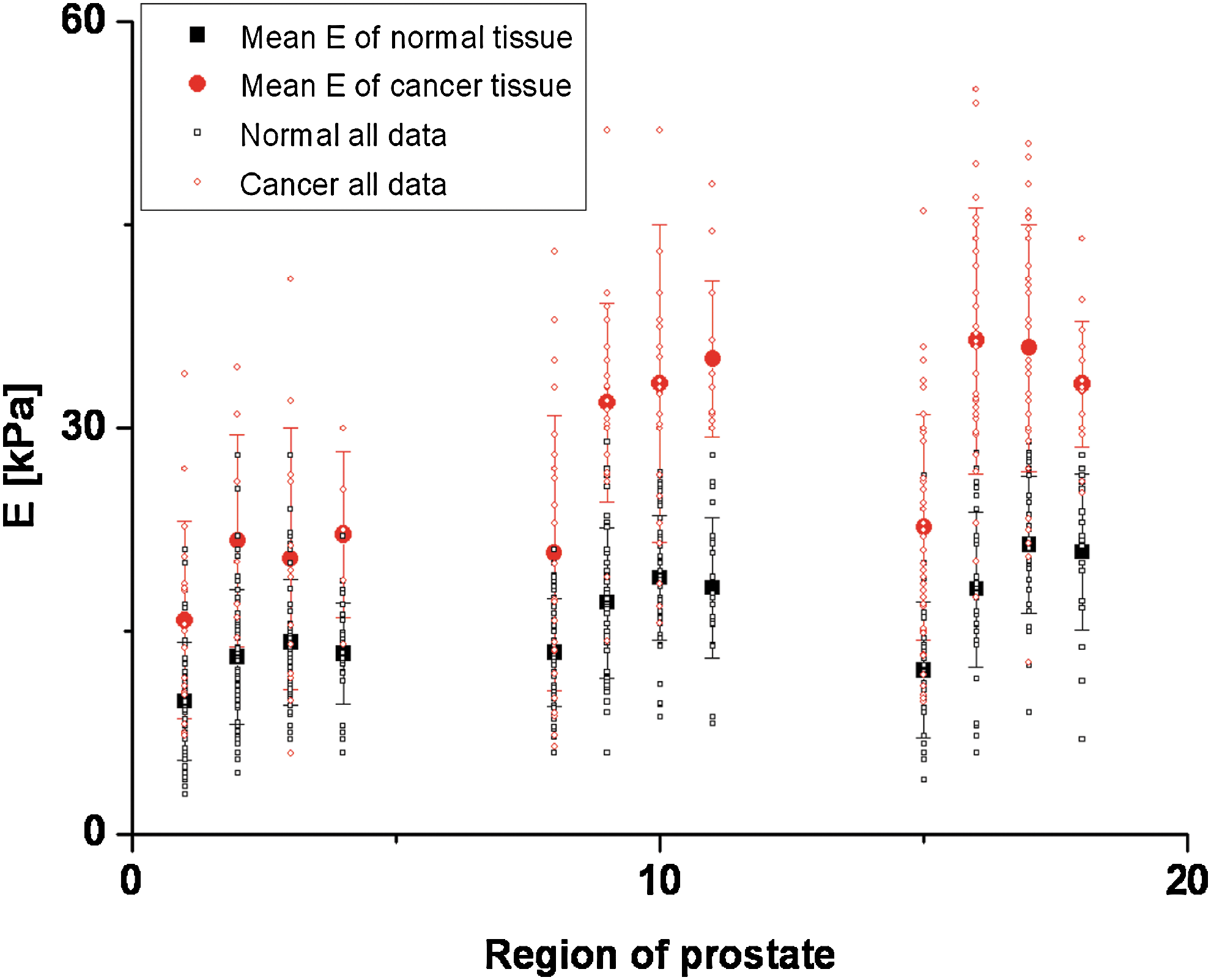
Elastic modulus of normal and cancer prostate tissues according to the regions. Color image available online at

Three-dimensional nonlinear surface fitting on the estimated elasticity of the prostate:
Discussion
The tissue elasticity may be an important predictor for the prostate cancer identification because the pathologic changes vary the tissue property from the alteration of cell integrity and intercellular matrixes. In this study, the novel method to identify the cancer tissues using the elasticity was proposed. The experiments on human prostates were performed to measure the mechanical behavior with respect to the various regions of the posterior surface. The elasticity as the quantitative and objective information of the prostate tissues was estimated. The analytical results show that the mechanical properties of normal and cancer prostate tissues affect the regions of the prostate. The results also show that the cancer tissue has a more hard property than the normal tissue for all regions. Furthermore, the tissue elasticity map was developed with the numerical function and the nonlinear surface fitting method. The map can be utilized as the criteria for the diagnosis and localization of prostate cancer.
The benefits by applying robotic technologies in urology are to enable physicians to provide precise, objective, and quantitative information to patients. Several robotic systems were developed by the previous researchers to measure and characterize biological tissue behavior against mechanical loadings such as aspiration, 21 indentation, 17,19 compressive pressure, 22 and shear strain. 23 These devices were used to apply specific mechanical loadings on the surface and measure the tissue behavior that reflected mechanical properties. In this study, we developed the palpation system, which can be applied as a tool for screening prostate cancer through measurement of the tissue properties. The results on the experiments and characterization show that our system can precisely measure the biological behavior of tissues, and the experimental results can be used to estimate objective and quantitative tissue properties. The results proposed in this study confirm the ability to differentiate cancer tissues from normal tissues based on its elastic modulus. Furthermore, this study proposed the elasticity maps of the tissues, which were obtained by the grossly measured data of the prostate in an ex vivo condition and can be used as a criteria for the prostate cancer diagnosis.
In the mapping, to find the best fitted equations of mechanical property maps, we applied several numerical equations for normal and cancer tissues. From the numerical fitting results, we can find that the proposed equations (2 and 3) are the best fitted. Therefore, we selected the equations and obtained the parameters of the equations that were the best fitted for mechanical property maps for normal and cancer prostate tissues.
The results of this study have limitations on direct application to the clinical (in vivo) trial because the results were obtained from ex vivo experiments. Thus, it is difficult to consider the tissue property between the rectal wall and prostate, which the results obviated because of the experimental condition. Since the experiments were performed without any information on the cancer tissue location, there is uncertainty in exactly matching the palpated site with the location. In addition, although we classified the prostate with respect to the 21 regions to increase the accuracy of the results, the elasticity can be affected because the cancer tissues are surrounded by the normal tissues. Furthermore, although the elasticity map on prostates does not consider the depth of the cancer tissues, prostate cancers generally arise in the peripheral zone (about 80%) of the prostate. 3 Therefore, it can be used as a reasonable tool for the diagnosis of prostate cancers. In order to increase the accuracy as a tool, the depth information of the map should be reflected. We need to consider the innate characteristics of the prostate, which reflected the histopathological conditions such as tumor site, tumor volume, and Gleason score. Thus, when the proposed maps were applied for an in vivo trial to detect the prostate cancer, the cutoff value of the property should be decided to discriminate the cancer tissues to the normal tissues.
In the future, in vivo experiments will be performed using the system for the purpose of verifying its safety and its potential as a clinically practical tool for prostate cancer detection. First, the experiments on animals will be conducted for human safety. If safety is verified, then the experiments on patients will be performed by urologists in the operating room. Furthermore, we will modify the system and interface to allow real-time prostate cancer detection.
Footnotes
Acknowledgments
This research is supported by Ministry of Culture, Sports and Tourism (MCST) and Korea Culture Content Agency (KOCCA) in the Culture Technology (CT) Research & Development Program 2010.
Disclosure Statement
No competing financial interests exist.