
Abstract
Background and Purpose:
Complete stone removal is important in upper tract stone surgery. Unfortunately, even with the latest technologic advances, current methods only achieve 50% to 80% complete clearance of upper tract stones at the time of primary treatment. Our group has explored the novel use of peptide-coated iron oxide superparamagnetic microparticles that bind to calcium stones, allowing for extraction of these stones with magnetic tools. We present analytic and numeric models that characterize stone attraction performance for feasible magnetic tool sizes and stone magnetization levels.
Materials and Methods:
Magnetostatics equations are applied to a simplified, one-dimensional scenario of a spherical target coated with a variable amount of superparamagnetic particles, placed under the influence of a magnetic field aimed at vertical attraction (capture) of the target. Equations are parameterized in terms of (a) target size, ranging from 0.5 mm to 3 mm to represent stone sizes of interest, (b) effective magnetization per surface area delivered by the particle binding chemistry, and (c) distance to the field source.
Results:
Target capture is predicted to be effective in the low, single-digit millimeter distance range, favoring smaller stones and then up to a practical upper limit of 3 mm diameter. Higher iron loading chemistries have a direct improvement in magnetic force and therefore increase the viability of the technique, albeit along an asymptotic trendline.
Conclusions:
We are able to characterize the potential for kidney stone capture via magnetic attraction. Computer-developed models show good correlation with experimental results using actual magnetized stone samples. Future research efforts can use the proposed techniques to estimate the performance impact of advanced magnetic tools and surface chemistries.
Introduction
A novel technique has been developed at our institutions whereby stone fragments are managed during surgery so as to react with a magnetic instrument. 4 The objective is to obviate the need to precisely target individual fragments for removal, thereby diminishing the associated difficulty, skill, and operative time. To render stones magnetophoretic, fragments are exposed to a solution loaded with iron-containing microparticles and functionalized for attachment to the stone surface. The chemistry is engineered such that microparticle binding to the stone surface takes place within a few minutes, after which extraction with a magnetic tool can be performed.
This technology has been conceived and directed at conventional ureteroscopy and, as such, instrument insertion via a standard ureteroscope access sheath constrains magnetic tool diametral cross-section as well as stone size to a theoretical maximum of 3.8 mm. The analyses presented in this study characterize a magnetic tool deployed inside the collecting system within said envelope, and estimate capture distance as a function of magnetic field strength, stone target size, and iron loading.
Materials and Methods
To explore the higher end of magnetic tool performance, we set the tool diameter at 2.5 mm—just below that of the ureteroscope (nominally 8.5F). This device would have to be back-loaded and would admittedly pose visualization challenges similar to current commercial products (Bigopsy, Cook Urological, Bloomington, IN). While it would be ideal to use the ureteroscope working channel in an antegrade fashion, benchtop experience demonstrated that the resulting 1 mm diameter magnet (<3.6F) would be too weak (data not published). Tool length is more arbitrary, the main limitation being maneuverability inside the collecting system. We set our working value at a long 13 mm, chosen to maximize the projected magnetic field strength. Within this cylindrical work envelope, multiple magnetic configurations are possible and can readily be substituted in the computer derivations. We assumed a simple, axially magnetized barrel magnet. Stone targets were assumed to be perfect spheres (actual stones admittedly have irregular shapes with greater surface-to-volume ratios) because this analytic simplification properly exposes the effects of variable stone size. Taken as a whole, the system can be represented as shown in Figure 1.

Overall magnetic stone capture system.
Mathematical modeling
Target distance is characterized by a single parameter x along the tool axis and the center of the stone, zero defined at contact. Two main capture modes are possible—vertical, or horizontal where weight is canceled at the expense of wall friction. In practice, we anticipate that the tool tip will approach the stone at an arbitrary angle dependent on the local collection site and endoscopic access, independent of body pose. For purposes of our analysis, we focus on pure vertical capture because it represents the most stringent threshold (nominally 3–4 times higher, based on friction estimates around 0.2–0.4). The corresponding free-body diagrams are shown in Figure 2.

Basic stone vertical and horizontal capture models.
The dynamic equation for capture is as follows, representing a force balance of inertial, gravitational, frictional, and magnetic components:
where r, m, and Vs represent the stone radius, mass and volume, η is the kinematic viscosity of saline, Fm is the magnetic force, and ρs and ρf are the stone and saline densities. Solved as a first-order equation on velocity and using representative values (m=3.4 mg, η=1.2 mPa-s, and r=0.72 mm), the time constant is in the order of 200 ms, thus making dynamics negligible—a fact easily corroborated by experience. Of considerably higher interest is the static force balance formula (without inertia and viscous drag) describing the onset of vertical capture:
which, for the stone sizes of interest, predicts the need for magnetic forces up to approximately 200 micronewtons.
The magnetic force acting on a body immersed in a field B can be approximated in lumped parameter form as the product of the field gradient at a given point and the magnetization of the body induced by said field.
5
The following expression simplifies this relation to the case of an idealized dimensionless target, aligned in our case with the longitudinal axis of the cylindrical magnet tool:
The field B and its gradient are a function of tool design and may readily be obtained from finite element software. For the axially magnetized barrel under consideration, a closed-form approximation
6
may be used:
Br is the remanent field strength of the magnet, and x=0 starts at the face of the magnet normal to the longitudinal axis. This field has a decaying exponential quality, and it can be shown that magnet length to radius ratios L/R greater than 5 yield no further gains in B(x); this is the actual basis for setting our tool length to 13 mm. For said dimensions and N52 grade material, the working B field is as shown in Figure 3.
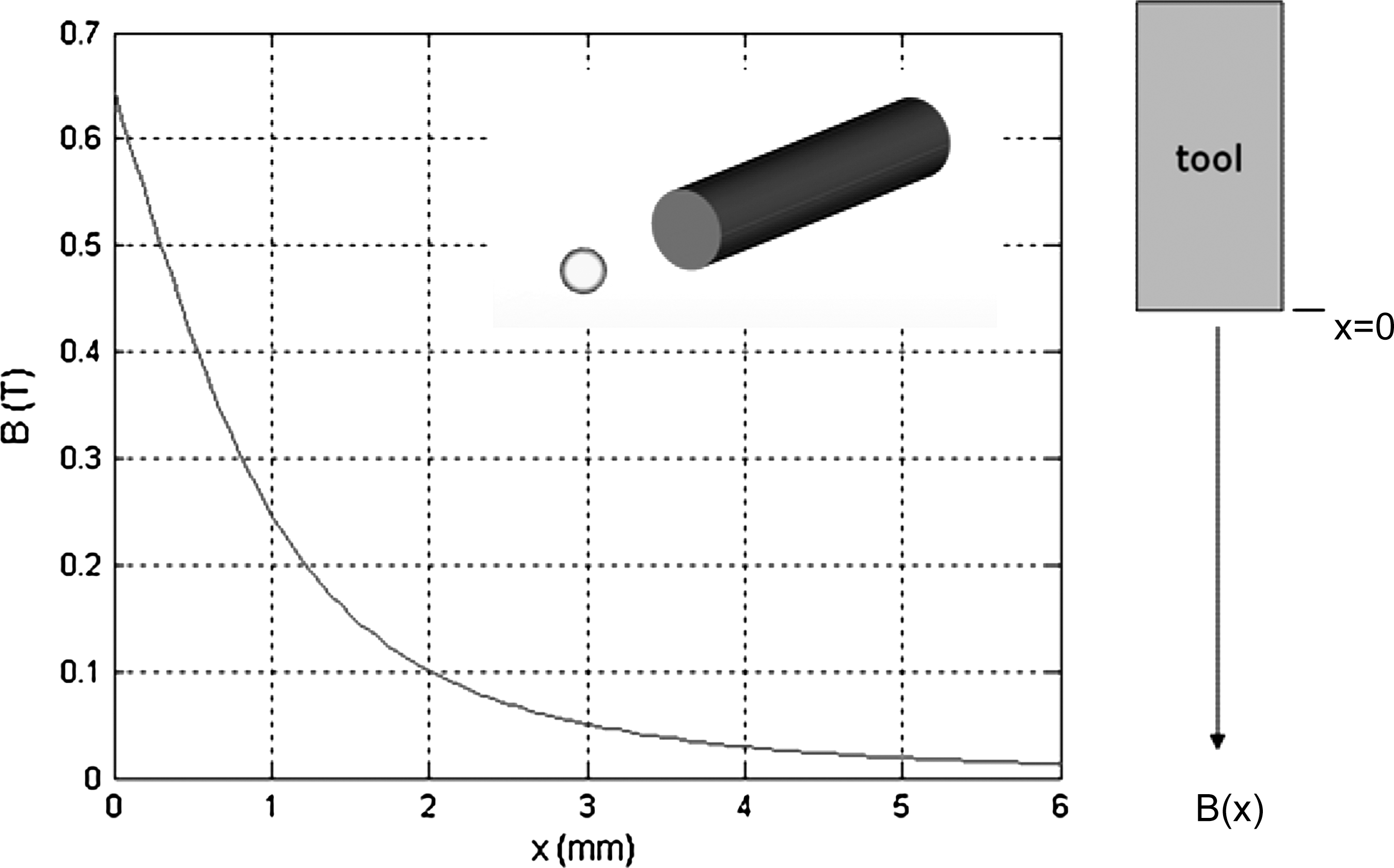
Magnetic B field projection along tool axis.
A dipole strength m(x) arising in the superparamagnetic particles is readily measured in the laboratory with a magnetometer, yielding a nonhysteretic “H vs emu” curve (1000 emu=1 Am2) characterized by a rapid magnetization buildup and subsequent saturation. The field strength H is known for any given distance from the tool B field, as is its gradient dB/dx; with the magnetization curve, we can calculate the induced dipole, and from this we can approximate the attractive force (equation 3) and determine whether capture occurs (equation 2). Since our objective is to develop a performance envelope for different size targets and microparticle surface loading, we curve fit the magnetization curve of a magnetized stone sample and parameterized it in terms of saturation value. Choosing the arctangent function as a base because of its similar shape, a curve-fitting algorithm can quickly optimize two unknown coefficients—one multiplying the arctan argument, and another used as a scaling factor:
This linear scaling of the sample magnetization curve does not hold universally, but it is useful for order-of-magnitude comparisons (a good visual match was seen against samples as high as 100 to 300 times the saturation dipole used to construct eq. 5). We can now easily iterate on target size and saturation value (on a surface area basis, emu/m2) to solve equation 2 for capture distance—ie, the distance at which the magnetic force balances the particle buoyant weight.
Numeric simulations
Representative magnet and target geometries were created and simulated using the three-dimensional magnetic field solver software Amperes from Integrated Engineering Software (Winnipeg, Manitoba, Canada). Material properties for the microparticle-coated target were input into the software directly from experimental BH curves (data not shown) obtained from magnetometer tests, while coercivity and remanence values for the magnetic tool were taken from the supplier datasheet. The simulation software reports not only the magnetic field distribution, derived by boundary element techniques, but also the net force acting on the target particle.
Results
Figure 4 shows the capture distance parameterized in terms of target size and surface magnetization. Current surface magnetization based on state-of-the-shelf particles is approximately 140 emu/m2.
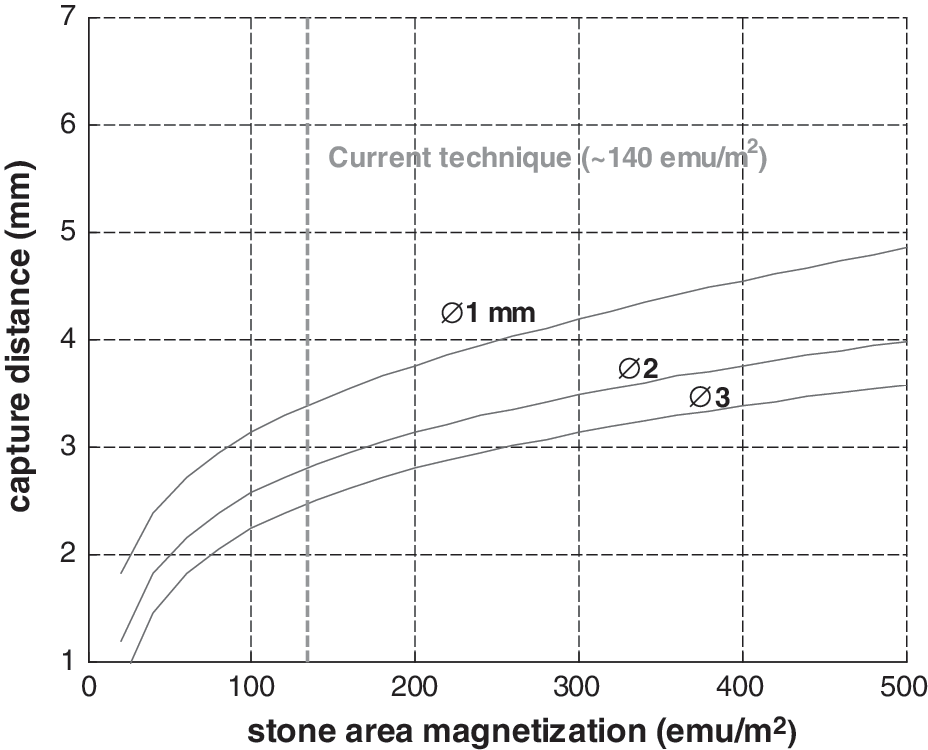
Capture distance as a function of stone area magnetization.
The observable features are a rapid initial increase in capture distance with iron content, subsequently trending at a lower rate. Small particles are favored; this is consistent with the fact that weight grows in cubic proportion to radius, whereas iron content is a surface effect growing in square proportion to radius. The results compare well with numeric simulations and with experimental tests performed with actual functionalized kidney stones (data not published). Foreseeable (double to quadruple) improvements in surface chemistry predict vertical capture distances in the 3 to 5 mm range (Fig. 4).
Discussion
The presence of remnant stone fragments continues to be an issue in the endoscopic management of stone disease. Rebuck and associates 7 found that in patients with clinically insignificant residual fragments after ureteroscopy, stone-related events over the following 1.6 years would develop in up to 20%. Similarly, Raman and colleagues 8 found that postpercutaneous nephrolithotomy stones greater than 2 mm or located in the renal pelvis or ureter independently predicted for future stone-related events. As such, technology to improve renal stone fragment clearance is needed.
The first experiments at functionalizing stone fragments with superparamagnetic microparticles were conducted by Tracy and coworkers. 4 The experiment was performed in a bladder model and involved exposure of stone fragments to a microparticle solution and then extraction of the fragments with a solid magnetic rod inserted via the working channel of a rigid cystoscope. It was found to be more efficient at extraction of stone fragments compared with a standard nitinol basket. There were clear limitations noted, however, including that attraction of the functionalized stone fragments to the magnet needed either direct contact or be within 1 mm. Also, the experiments were performed in a bladder model with a rigid rod magnet, although the future intent is for the system to be used in the confined spaces of the renal collecting system using a small diameter flexible magnetic tool.
The modeling performed in this study sought to determine the potential performance envelope of the functionalized stone fragments based on the current generation of microparticles and surface chemistry and how the modeling compared with in vitro experiments in the bladder simulator. During retrograde intrarenal surgery, the patient is usually placed supine. Some of the calices will be orientated vertically—thus, the decision to base the modeling on a worst case scenario of vertical capture. The model predicts that 3 mm stone fragments may be attracted from just over 2 mm using a 2.5×13 mm cylindrical magnetic tool.
The current magnets being used are neodymium boron iron (NdFeB), grade 52, nickel-coated magnets. These represent among the highest energy product magnets that can currently be purchased off the shelf. As such, further improvement in tool performance is unlikely. We have experimented with electromagnets, but at the small sizes needed for the magnetic tool, the electromagnets easily overheat and do not produce a magnetic field as strong as the neodymium magnets. As for the current microparticles in use, they are 25.5% iron (Dynabeads® MyOne,™ Invitrogen). Higher iron content could improve capture distance as indicated in Figure 4. This graph shows the combined effect of microparticles plus surface chemistry (emu/m2); the implication is that if, for example, microparticle Fe content alone were to increase to 50% Fe, the stone fragment magnetization would increase from 140 emu/m2 to 280 emu/m2 and capture distance would increase by approximately 1 mm.
The modeling performed in this study demonstrates that there are fixed limitations to the capture distance that can be achieved with this technology. As discussed, increasing microparticle iron concentration feasibly increases capture distance by about 1 mm. Another approach, as alluded to, would be to improve the surface chemistry for microparticle stone binding—increasing relative iron deposition. Continued work on this aspect is anticipated. Last, new tool designs may improve stone particle capture. For example, a tool that incorporates both a basket and a magnet could be more effective than either tool alone.
Conclusions
The use of superparamagnetic particles in combination with magnetic tools to extract stones continues to be a promising area of research. The analytic techniques presented quantify how improvements in particle binding chemistry and magnetic tool design stand to raise capture distance. Our results suggest that current technology allows for effective capture in the low, single-digit millimeter range, favoring smaller stones up to a practical upper limit of 3 mm diameter. Higher iron loading chemistries have a direct improvement in magnetic force and modestly increase the viability of the technique along an asymptotic trendline.
Footnotes
Acknowledgments
The authors gratefully acknowledge the support received from The University of Texas at Dallas and the TexasFuture Semiconductor Commercialization (FUSION) Consortium to carry out this research.
Disclosure Statement
No competing financial interests exist.