
Abstract

M
Since 2012, ELMED (Ankara, Turkey) has been working on a robot specifically designed for flexible ureteroscopy. 3 The Roboflex Avicenna is operated using a surgeon's console and a manipulator of the flexible ureterorenoscope. The console consists of an adjustable seat where the urologist controls two different joysticks to handle the endoscope. The right joystick permits deflection like a standard ureterorenoscope, while the left joystick allows rotation, advancement, and retraction of the endoscope. The direction of deflection (upwards and downwards) can be used with US or European versions. The controls allow four functions: adaptation to US or European mode, change of speed of rotation and advancement, advancement and retraction of the laser fiber, and adjustment of the irrigation flow rate. The pedals control the fluoroscopy and the laser fiber. Small motors move the tip of the endoscope and allow it to perform basic movements inside the ureteral access sheet. There is also a system for advancement of the laser fiber connected to the working channel of the ureteroscope. The irrigation system is operated by a 25-speed mechanical pump connected to the console. In the display, there is also a button that allows additional irrigation for about 1 second (Fig. 1A).
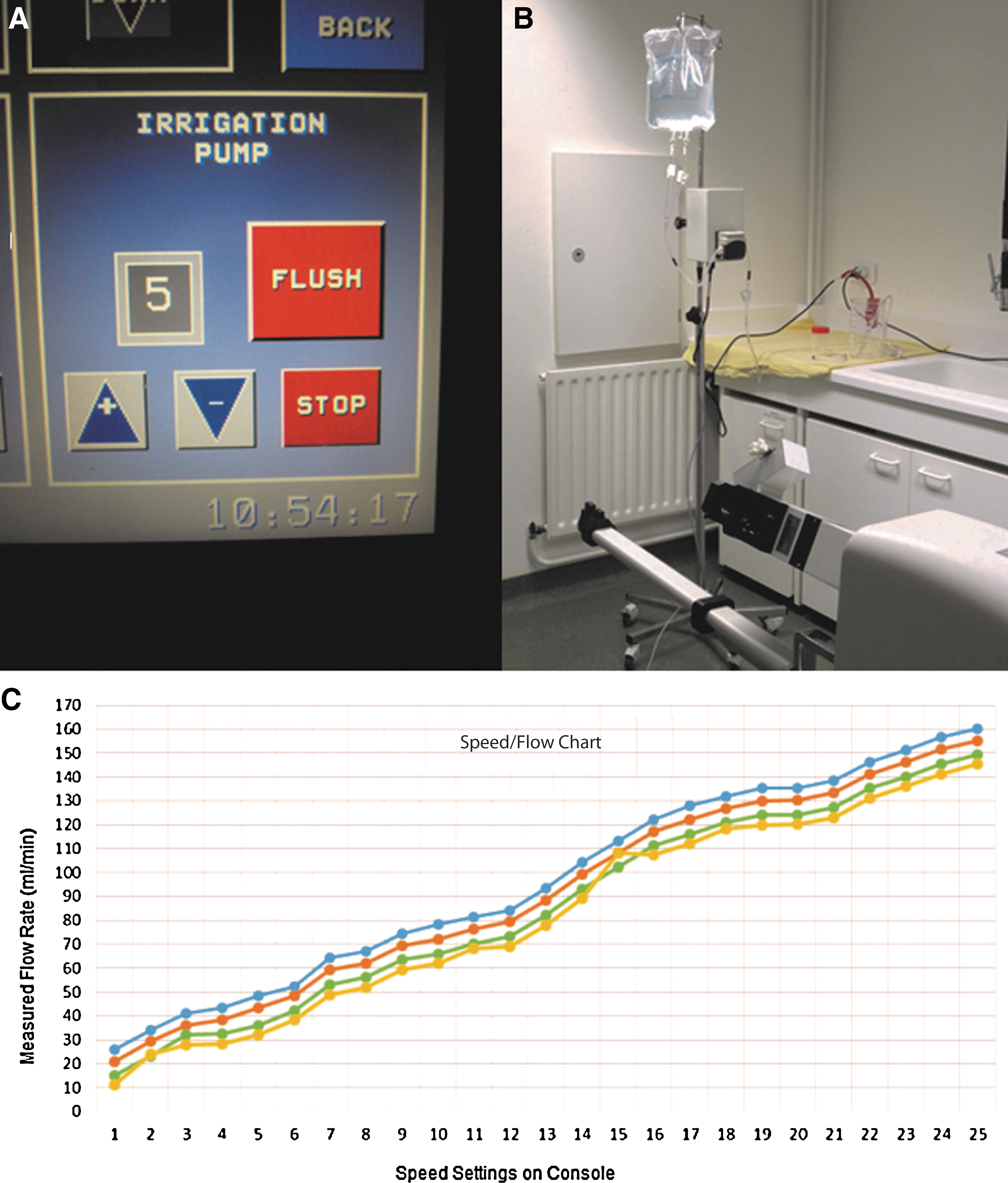
Today, we understand the mechanics and electronic parts of Roboflex. Yet, the precise flow produced by the pump in each of the different speed settings remains unknown. The instruction booklet also fails to explain this open question. For this reason, we believe that urologists working with Avicenna Robots should be aware of the pump's flow rate for each speed setting. To better determine this, we attached a container connected to the pump's irrigation system and measured the quantity of saline solution for each speed setting in different modalities (Fig. 1B): the pump on its own, the pump with ureteroscope (Olympus P5), with a laser fiber (200 μm by Rocamed), and the pump with a basket (Dakota by Boston Scientific). The results of our experiment are presented in Figure 1C. They demonstrate that the pump system does not maintain a constant flow rate when passing from one setting to another, as well as when it is in high-speed mode. Specifically, differences in flow rate from one setting to another are within a range of 3–5 mL/min in the low- and high-speed settings, while differences in flow rate are within a range of 8–10 mL/min in the intermediate-speed settings (a change in flow rate that is virtually double that of the low- and high-speed settings). Maintaining constant and consistent flow is critical during these operations because flow is tightly connected to intrarenal pressure. At the current state of the art, we have no data to evaluate intrarenal pressure, but several studies have been performed on the correlation between pressure and renal damage during flexible ureteroscopy. One of these studies by Schwalb showed that high-pressure irrigation during flexible ureteroscopy in pigs caused irreversible damage to the kidney parenchyma, and it has been suggested that infectious complications may be the result from bacterial translocation and renal extravasation. 4
For these reasons, we suggest caution using the Roboflex Avicenna pump, particularly while using the high-speed settings or when passing from low to intermediate speeds due to the increase in flow rate and resultant pressure.
More complex studies are needed to evaluate the behavior of the pump and how it relates to flow and intrarenal pressure since this is merely a first evaluation.