
Abstract
Regenerative medicine and tissue engineering are hindered by the lack of consistent measurements and standards for the mechanical characterization of tissue and scaffolds. Indentation methods for soft matter are favored because of their compatibility with small, arbitrarily shaped samples, but contact mechanics models required to interpret data are often inappropriate for soft, viscous materials. In this study, we demonstrate indentation experiments on a variety of human biopsies, animal tissue, and engineered scaffolds, and we explore the complexities of fitting analytical models to these data. Although objections exist to using Hertz contact models for soft, viscoelastic biological materials since soft matter violates their original assumptions, we demonstrate the experimental conditions that enable consistency and comparability (regardless of arguable misappropriation). Appropriate experimental conditions involving sample hydration, the indentation depth, and the ratio of the probe size to sample thickness enable repeatable metrics that are valuable when comparing synthetic scaffolds and host tissue, and bounds on these parameters are carefully described and discussed. We have also identified a reliable quasistatic parameter that can be derived from indentation data to help researchers compare results across materials and experiments. Although Hertz contact mechanics and linear viscoelastic models may constitute oversimplification for biological materials, the reporting of such simple metrics alongside more complex models is expected to support researchers in tissue engineering and regenerative medicine by providing consistency across efforts to characterize soft matter.
Impact Statement
To engineer replacement tissue requires a deep understanding of its biomechanical properties. Mesoscale indentation (between micron and millimeter length scales) is well-suited to characterize tissue and engineered replacements as it accommodates small, oddly shaped samples. However, it is easy to run afoul of the assumptions for common contact models when working with biological materials. In this study, we describe experimental procedures and modeling approaches that allow researchers to take advantage of indentation for biomechanical characterization while minimizing its weaknesses.
Introduction
Biological soft tissue is a challenging material to model: it is hyperelastic, heterogeneous, and anisotropic; it consists of numerous interfaces and hierarchical structures; and it is composed of networked polymer chains and charged fluid that impart time and strain-rate dependence to its mechanical properties. While sophisticated constitutive models of these tissue properties are critical for accurate mechanical behavior modeling, simple quantitative values of basic mechanical properties remain important for mechanobiology and tissue engineering research. Researchers designing their own biomaterials and scaffolds recognize the need to quantify mechanical properties carefully, 1 but soft matter characterization is complex. To be useful across wide-ranging experiments, laboratories, and companies, simple and easy-to-compare metrics of tissue mechanics are needed to complement sophisticated constitutive models.
Young's elastic modulus, perhaps the simplest metric to describe traditional engineering materials (e.g., metal alloys and ceramics), mediates the linear relationship of uniaxial stress (force divided by area) to uniaxial strain (deformation normalized to original length) in materials within their elastic range for small strains (e.g., <1%). However, biological materials can exhibit complex fluid characteristics and are challenging to manipulate into shapes and sizes amenable to simple stress-strain calculations; thus, tissue is not easily described by the conventional Young's modulus. Common tensile and shear test equipment requires samples of standard shapes and sizes, which is not always possible with biological samples, and requires low-load transducers, which are not always standard components (Table 1). 2 To accommodate small samples of irregular sizes and to avoid testing issues, such as tissue clamping and tearing in tensile testing and asymmetrical geometries for compression, nanoindentation and atomic force microscopy (AFM) use nano- to microscale probes and precise sensors to contact a surface and measure corresponding deflections. 3 These tools were initially optimized to characterize nanoscale features and properties of hard materials and have also proved useful at the protein and cell scales,4–6 but researchers interested in materials for biomedical applications are often interested in the mesoscale (100 μm–1 cm) as they design higher-order structures for implantation and repair.
Common Mechanical Characterization Tools for Biomaterials
In this study, we explore the applicability of indentation at this mesoscale to hydrated, soft matter samples. We and others have developed custom equipment capable of performing indentations at the mesoscale,7–14 but translating force-displacement data derived from indentation into intrinsic mechanical properties remains a contentious process. As many have argued, Hertz contact models originally developed to derive an elastic modulus from indentation data on hard, elastic materials are inadequate to quantify intrinsic mechanical properties for soft matter.15,16 When applied haphazardly to soft matter, Hertz contact mechanics yields notably variable results, as we demonstrate here. However, certain conditions yield reliable and consistent effective elastic moduli from mesoscale indentation of soft matter, even using a Hertz model. This approach is not appropriate for researchers working on modeling of mechanical behavior, but the effective mechanical properties resulting from the simple models described in this study can inform the design of new materials by providing simple, reasonable target metrics. We report an example mechanical property derived from a modified Hertz model—the steady-state modulus (SSM), a strain-rate-independent metric also referred to in mechanics as the equilibrium modulus, aggregate modulus, infinity modulus, or permanent modulus 17 —for a variety of human tissues, animal tissues, and biomaterials as a step toward simple comparisons of tissues and scaffolds.
Materials and Methods
Indentation apparatus
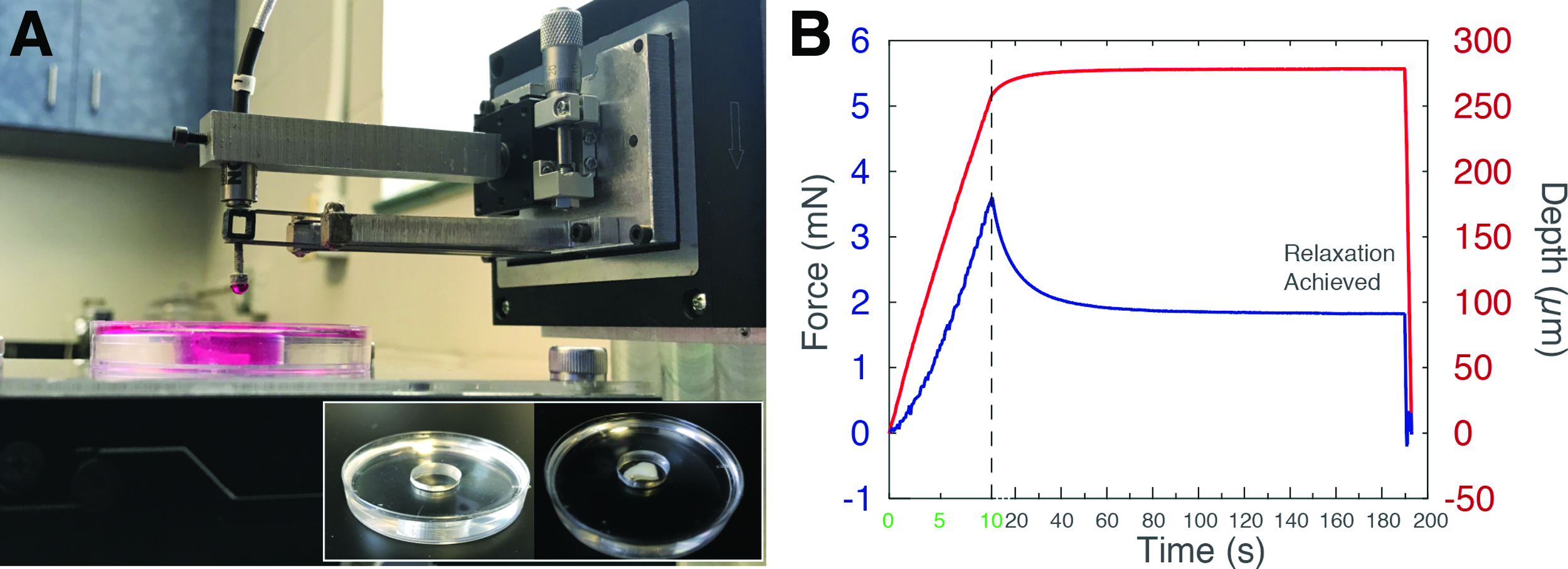
Our cantilever-based system comprises a capacitive sensor to quantify deflections of the tip of a custom titanium cantilever (Fig. 1).12–14 The cantilever-based probe is displaced vertically into the sample using a software-controlled, position-encoded piezoelectric stage (P-628.1CD; Physik Instrumente). The spherical indentation probe is brought into contact with the tissue sample following a time-dependent displacement profile set by the user in custom LabVIEW code. The reacting normal force of the tissue bends the titanium cantilever, and the relative displacement of the cantilever tip is measured by a capacitive sensor (C8S-3.2-2.0 and compact driver CD1-CD6; Lion Precision) through a data acquisition card system (NI 9220 and cDAQ-9171; National Instruments). The stiffness of the cantilever (79.8 N/m), calibrated using small weights that cover the full range of the capacitive sensor, is used by the LabVIEW code to determine the normal load throughout the indentation cycle. The indentation depth is held for a certain amount of time, termed the relaxation time. This “spring-loaded” relaxation does not constitute a pure stress relaxation experiment because the probe tip is allowed to move, but the deflection during relaxation is <5% of the typical indentation depth. Actual indentation depth is used in calculations, so this assumption does not affect contact model calculations. After relaxation is completed, the probe returns to its initial position (these retraction data are not included in the present analysis).
In this work, pancreas samples were indented using a hemispherical-tipped 1 mm borosilicate glass probe; all other samples were indented using a 4 mm polished ruby hemisphere or as indicated in the text. We chose to work with (hemi)spherical probes that are easily ordered with “optically smooth” finishes in a range of diameters to leverage the substantial body of literature around nanoindentation and AFM, which typically use Hertz contact models for spherical tips and flat semi-infinite substrates. While many contact models are also available for “flat punch” tips, and indeed flat tips have been used elsewhere for milliscale indentation, 9 machining and polishing a flat tip to a minimally adhesive mirror finish is beyond the capacity of most academic machine shops.
Preparation and maintenance of hydrogel and tissue samples
A wide range of synthetic, bioderived, and tissue samples have been utilized for demonstration of mesoscale indentation. Characterization of similar materials by indentation is tabulated for reference in Supplementary Table S1.11–13,19–28
Resected tissue samples
Human samples of pancreas were generously provided by General Surgery at the University of Florida. Patient consent, data de-identification, and tissue procurement followed protocols approved by UF's Institutional Review Board. Twenty-five pancreas resections were analyzed: 5 normal (no histologic evidence of pancreatitis or cancer), 9 pancreatitis, and 11 pancreatic ductal adenocarcinoma tumors. 13 Excised tissues were placed in DMEM-F12 media and stored on ice to maintain hydration and help preserve cell and tissue conditions during transport. The size of the sample varied substantially, but volumes generally ranged between 0.1 and 1 cm3 with side lengths between 2 and 10 mm. Between 7 and 13 indentations were performed depending on the size of the sample. If the smallest dimension was >4 mm, the sample was sliced in a matrix slicer (Zivic Instruments) to obtain a 3 mm thick sample with a flat indentation surface.
Murine hearts were generously provided by the Division of Cardiovascular Medicine at UF and were obtained consistent with AVMA guidelines. 12 One excised Wistar-Kyoto heart was cut using a stainless-steel rat heart slicer matrix (Zivic Instruments) to obtain a 3 mm thick horizontal (transverse) ventricular slice to generate data for Figure 6C. For all tissue samples, the tissue resections, submerged in culture media, were allowed to reach ambient temperature before indentation, and indentations were carried out no more than 2 h after resection.
Hydrogels
A polyacrylamide (PA) gel was polymerized from acrylamide–bisacrylamide precursor solution with ammonium persulfate and tetramethylethylenediamine initiators to generate data in Figure 4. Gel volume of 380 μL was covered with 22 mm diameter cover glass during polymerization, which resulted in ∼1 mm thick disc of gel, similar to a configuration reported previously. 29
Agarose powder (UltraPure™ Agarose; Life Technologies Corporation) was diluted in water to wt% indicated, heated to ∼70°C, and stirred for 15 min until the solution became transparent. The solution was transferred to Petri dishes and allowed to cool to obtain ∼3 mm thick agarose hydrogels. After 30 min of cooling at room temperature, deionized water was added to the Petri dish to fully submerge the sample and maintain hydration.
Polydimethylsiloxane samples were produced using the CY52276 Kit (Dow Corning). The silicone samples were fabricated following manufacturer's instructions by mixing a 10:1 (w:w) ratio of base to curing agent. The precursor solution was then thoroughly mixed, poured into the bottom of a 40 mm diameter Petri dish, vacuum degassed for an hour, and stored in a 50°C oven overnight. A dilute Triton-X 100 1:100 solution was used to reduce adhesiveness and keep the samples submerged during indentation.
All samples were stored in fluid as indicated and indented 24–48 h after fabrication to allow swelling to reach steady state and therefore avoid disruption of data acquisition during indentation.
Tissue engineering scaffolds
High-concentration rat tail collagen type I (Corning) was diluted with 0.02% acetic acid and combined in a 3:1 ratio with Dulbecco's Modified Eagle's Medium 5X (SIGMA Life Science) and 1 M HEPES buffer solution (Gibco by Life Technologies) to fabricate 2 mg/mL collagen hydrogels. The precursor solution was prepared at ∼4°C and then incubated at 37°C for 30 min to allow thermogelling. The gels were then hydrated with phosphate-buffered saline (PBS) and kept at 37°C until before indentation (between 2 and 24 h). Decellularized bovine kidney was kindly supplied by Dr. Bradley Willenberg from the University of Central Florida and obtained through previously published methods. 30 Samples were maintained in saline solution for shipping on ice, stored in saline at 4°C, and indented in PBS less than a week after receiving shipment. One 1 mm thick slice was used to generate data in Figure 7.
Contact mechanics model and modified hertz “transient” modulus
Many groups use indentation to characterize soft biological materials because indentation offers advantages in the context of milliscale, irregularly shaped samples. However, indentation methods for soft matter have been widely criticized because contact models used to convert force-displacement data to effective moduli such as the Hertz modulus were originally developed for elastic, homogenous materials and not viscoelastic, hydrated biomaterials. Conventionally, the Hertz model for a spherical indenter on an elastic half-space is as follows:
where F is the normal force,
This model assumes that the indented material is linear elastic, as indicated by the use of the constant elastic modulus in the equation. However, for biological materials, the work performed by the indentation tip into the sample is only partially stored as strain energy; some energy is dissipated by viscous mechanisms. This constraint and others of the Hertz model are thoroughly discussed in Results and Discussion section. To capture this time-dependent, energy-dissipating effect, we rewrite the traditional Hertz equation as an effective modulus that is a function of force and displacement:
where the variables are defined as in Equation (1). Since we have both force and displacement as a function of time from our indentation data (Fig. 1), we can write the transient modulus as a function of time:
where
Estimation of error associated with Equation (3) can be determined by propagation of uncertainty 34 using typical values for force, Poisson's ratio, and displacement (Supplementary Table S2). Large error is associated with low maximum forces (<100 μN), which can be reduced by using a larger diameter probe tip if the sample area is large enough to accommodate it. With low maximum forces, error propagation analysis suggests that percentage error values can reach ∼25%, which may or may not be sufficient to distinguish between experimental groups (e.g., healthy vs. diseased tissue).
Assignment of Poisson's ratio
Poisson's ratio (the negative ratio of strain in one direction to that in an orthogonal direction) is straightforward to define for rigid, elastic materials; however, the concept is more complex for soft matter. It is commonly assumed that ν = 0.5 for “incompressible” biomaterials, but values for biological materials may be lower because long polymer chains and fluid flow allow some volume loss that can be interpreted as compressibility. Experimental determination of Poisson's ratio is challenging because test coupons of tissue have different properties than intact tissue and because the boundary conditions of the test configuration substantially change the results. Thus, uncertainty is present with any assumed Poisson's ratio used in Equations (1)–(3). For simplicity, we used ν = 0.5 for all calculations; a propagation of uncertainty calculation for Equation (3) reveals that a variation of ν between 0.3 and 0.5 results in a deviation ∼10%. For compliant samples, this variability is equivalent to or less than error from other sources (Supplementary Table S2), but for stiff samples, the estimate for Poisson's Ratio may be the main source of variability and should be validated carefully if differences between experimental groups are also ≤10%.
Submersion conditions
To submerge resected tissue, samples are placed in contact with a dry polystyrene surface before adding saline or culture medium to leverage adhesive properties of tissue. To reduce fluid volume and buoyancy forces that may detach tissue, we typically fabricate custom sample chambers by filling Petri dishes with silicone (e.g., Sylgard 184; Dow Corning), storing cured dishes covered at room temperature, and punching out a chamber with a diameter 10–20% larger than the tissue sample (Fig. 1A inset). In some cases, adhesion and sample weight are not enough to counteract buoyancy, in which case a small drop of surgical glue can be applied to the outer edge of the dry chamber before placing sample. Care should be taken with this approach to use large surface area samples (>1.5 cm side length) and small amounts of glue as we have found these acrylate-based glues to rapidly diffuse into the tissue and cause dramatic stiffening. We did not use this technique for any samples reported in this article.
Engineered samples, prepared for indentation in situ, typically adhere to chamber after polymerization sufficiently to avoid flotation. For our demonstration of surface adhesion, three materials over a relatively wide range of SSM values were selected as case studies: 2 mg/mL collagen hydrogels (∼500 Pa), 4.5% acrylamide/0.075% bisacrylamide hydrogels (∼2 kPa) and CY52276 silicone (∼30 kPa). Samples were indented “dry” first, which for collagen and PA hydrogels meant that the surface layer of fluid was allowed to evaporate for 10–15 min before indentation. The indentation probe was manually positioned close to—but not in contact with—the surface of the samples before the computer-controlled indentation cycle was initiated. After each sample was indented, it was allowed to recover for >5 min. PBS (collagen and PA) or 5% sodium dodecyl sulfate in water (silicone) was added to fully submerge the sample and indentation tip without adjusting the indentation tip location. The sample was then reindented under submerged conditions.
Results and Discussion
Force-displacement data do not fit the Hertz equation for large indentation depths
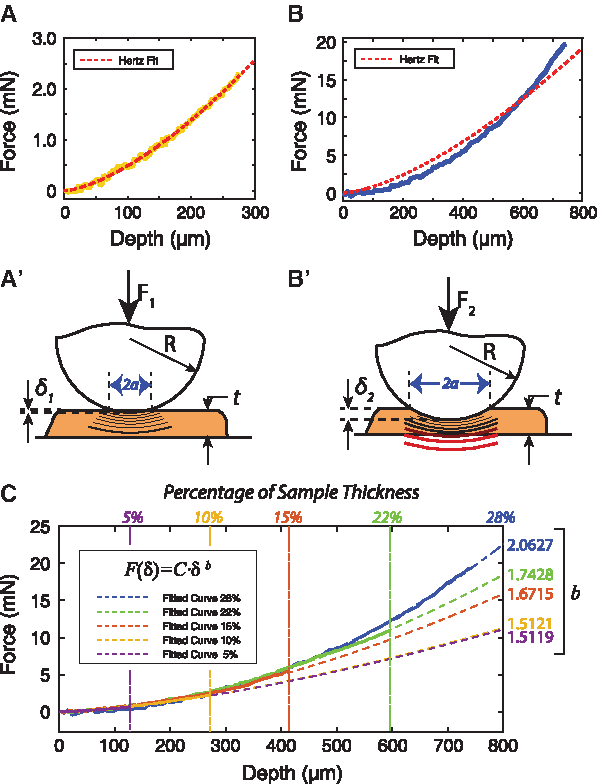
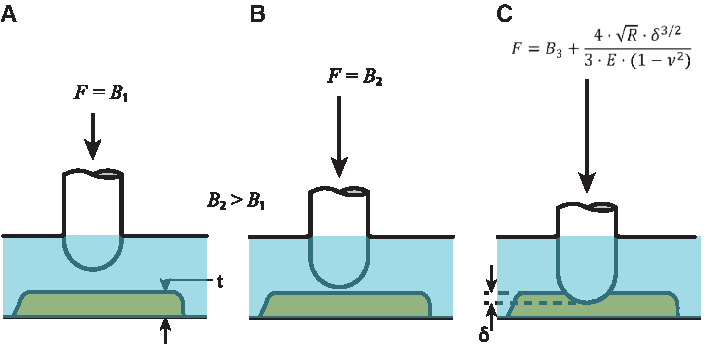
In addition to constraints associated with the material and friction/adhesion mechanisms, the Hertz model is limited to very small contact areas and indentation depths. Specifically, the indenter radius should be much greater than the indentation depth, and the indentation depth should be much less than (i.e., less than ∼10% of) the sample thickness; see Selby et al.
35
for exemplar article with detailed discussion and experimental demonstration of these considerations. For very compliant materials, however, suitable indentation could require a substantial contact area and/or depth to obtain measurements above the noise floor of the equipment. Large-indentation-depth violations of Hertz assumptions further render the Hertz model unsuitable for soft biomaterials.
36
If materials are indented to an excessive degree (>10% thickness), Equation (1) cannot be fit to the data (Fig. 2B) as is generally agreed upon by the nanoindentation community.
37
However, when the depth of indentation remains small (≤10%), the data reasonably fit Equation (1) (Fig. 2A, normalized mean square error [NMSE] = 0.9959) as seen in other studies.38,39 Regressions in the form of
Mesoscale indentations reduce intrasample variation
Given the clear violation of many of the original Hertz assumptions by biological materials, it is notable that the equation still describes the observed force-displacement behavior for the wide variety of soft materials we have tested. One experimental element that may be contributing to the consistent fit is our use of a relatively large millimeter-scale indentation tip (4 mm diameter). Contact bodies are assumed to be homogeneous in the Hertz contact model, but tissue samples, protein-based scaffolds, and even some synthetic hydrogels are heterogeneous. Tissue is composed of cells and cell-secreted extracellular matrix (ECM), such as hyaluronic acid, collagen fibers, and proteoglycans, among other components. Mammalian cells in tissues commonly range from 10 to 100 μm in length. The interstitial spacing between cells, filled with ECM components and fluid, can range from 3.5 nm between connected neurons and epithelial cells to 30 μm between connected mature bone cells. Microscale probes could be probing a single cell or even between cells. Nano- and microscale indentations exacerbate this heterogeneity, whereas millimeter-scale indentations approach homogeneous conditions (Fig. 3).
Hertz modulus from 10 indentations (8 μm/s) on decellularized kidney using a 1 mm diameter probe
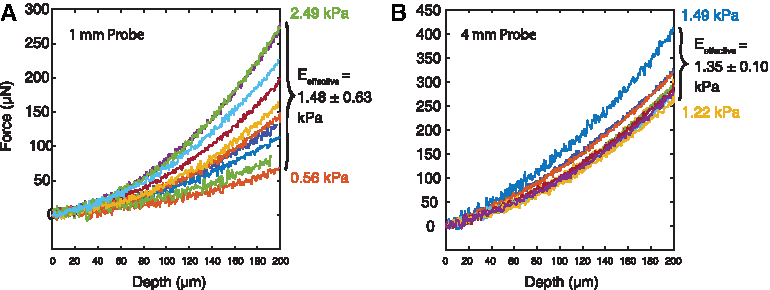
Excised tissue samples from patients are frequently small fragments that offer limited surface area for indentation, so large spherical probes with diameters on the order of sample size allow only a few indentations per sample. Probe size selection must balance between a sufficiently large probe to capture mesoscale, semihomogeneous features, and a sufficiently small probe to enable multiple indentations without artifacts from nearby indentations. We recommend the largest probe size that can achieve >3 distinct indentations, while remaining two indentation lengths (∼one probe diameter) away from edges and previous indents. For example, for samples prepared in a 96-well plate or an excised tissue sample <1 cm2, a 1 mm-diameter probe could yield four to six indentations. For larger samples (>1.5 cm side length or diameter), probes with greater diameters (e.g., 4 mm as we discuss) reduce variance, while yielding >3 indentation locations for statistical analysis or even a heat map of elastic values.
The sensitivity of our device also enables micron-scale indentation depths with micron-scale contact areas, avoiding known nonlinear deformation of polymers and soft matter at large deformations. However, the material is also assumed to be isotropic in the Hertz model, which remains an important restriction. In gelatin-alginate hydrogels that polymerize in organized, oriented fibers, we detected different effective moduli in orthogonal directions, warranting a model that reflects this anisotropy (Supplementary Fig. S1).
Importance of minimizing adhesion and finding the sample surface
Submersion of samples suppresses adhesion
The original Hertz contact model assumes no adhesion or friction during indentation. The presence of adhesion dramatically affects analyses of the hysteresis and hysteresis loss factor (elastic strain energy ratio) for loading–unloading indentation cycles. 3 In stress relaxation experiments, which do not incorporate the unloading phase of the force-displacement profiles, high adhesion between surfaces may still cause inaccuracies during the loading stage.40,41 However, submersion detectably decreases the adhesiveness of most samples and can eliminate adhesion for hydrogels at the mesoscale. 42 Adhesive “snap-in” can be detected while approaching a relatively dry sample (Fig. 4, bottom row). The measured forces are close to zero until adhesive forces pull the tip onto the surface, at which point the forces transition to negative values and slowly start increasing as the indentation probe continues to move into the sample. Unlike indentation on dry samples, submerged indentations show a consistent linear increase due to buoyancy, followed by the successively increasing force that characterizes Hertz contact (Fig. 4, top row).
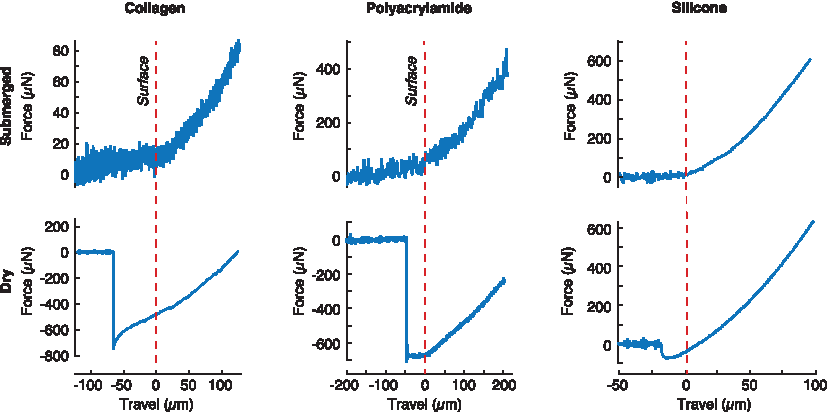
Force-displacement profiles for approach and loading stages show that tip-to-sample adhesion on dry samples (left column) causes Hertz fits to be inapplicable to curves immediately after contact, while submerged sample profiles (right column) show a clear transition from a linear buoyancy increase to Hertz contact behavior. Here, 2 mg/mL collagen (∼500 Pa), 4.5% acrylamide/0.075% bisacrylamide PA (∼2 kPa), and CY52276 silicone (∼30 kPa) were used. Vertical dashed lines indicate expected contact with the sample surface absent adhesive forces. The submerged PA gel and silicone were indented at 8 and 3 μm/s, respectively. A rate of 1 μm/s was used for all other indentation experiments to reduce noise. PA, polyacrylamide. Color images are available online.
Accurate surface finding is required to use the transient modulus
The development of indentation systems for traditional engineering materials has generated multiple techniques for accurately finding the surface before indentation, but these techniques are confounded in soft biological materials because of low contact forces and the possibility of adhesion forces. Consensus is that most hydrogels and tissue samples are submerged to maintain hydration—avoiding sample shrinkage and cell death—and to meet the low adhesion requirement previously discussed.
It is computationally critical, however, to know exactly when the probe first makes contact with the surface,43–46 and buoyancy forces can easily be confounded with contact forces as the tip moves closer to the sample before actual contact. This increase in buoyancy is easier to detect when linear as it can be differentiated from the curved loading stage of the indentation, assuming that linearity is ensured using constant-diameter indentation shafts (Fig. 5A). A simple approach to locating the sample surface is to carry out a linear regression for the group of points starting at time zero and ending in a variable time, t. The time for which this regression is no longer linear (corresponding to a low coefficient of determination) can be used to assume the position for which the probe makes contact with the sample (Fig. 5).
When using the transient modulus to calculate SSM, it is imperative to identify the surface of the sample accurately. In general, the distorted curvature of force-displacement curves resulting from inaccurate surface detection can result in fitting to inappropriate contact models. 47 For the models described here, initiating an indentation routine with inaccurate identification of the sample surface can result in unreliable values for effective moduli, transient moduli, and the SSM (Supplementary Fig. S2). If an indentation begins away from the surface (out of contact), a Hertzian regression does not fit the initial indentation data well but the transient modulus can still be fit to viscoelastic models (Supplementary Fig. S2A, A′ and Supplementary Table 3). However, the standard linear solid (SLS) fit results in misleadingly low SSM values compared to appropriately indented samples (Supplementary Fig. S2B, B′). If a sample is erroneously preindented, the Hertz fit for the loading stage and SLS fit will be reasonable, but the SLS fit will yield an artificially high SSM (Supplementary Fig. S2C, C′). Consequently, our recommendation is to confirm that the transient modulus during the loading stage (before relaxation) fluctuates around a value that is similar to the Hertz-derived effective modulus of the indentation phase (Supplementary Fig. S2B, B′).
The effective modulus from the Hertz contact model is strain-rate dependent
The Hertz contact model assumes linear elastic, homogenous, and isotropic properties—idealizations that often do not apply to biological tissues. Furthermore, the surfaces must be frictionless, smooth, and adhesionless to satisfy the Hertz assumptions. However, with careful experimental controls, the form of the Hertz contact model as in Equation (1) does fit well to indentations of soft biological materials (Fig. 2A). Note that for soft matter, the modulus derived from this equation cannot strictly be termed the “elastic modulus” because the material exhibits known relaxation with short-time scales and because this modulus quantity varies substantially with small changes in indentation rate (Fig. 6). Thus, we refer to this simplified value as the “effective modulus.”
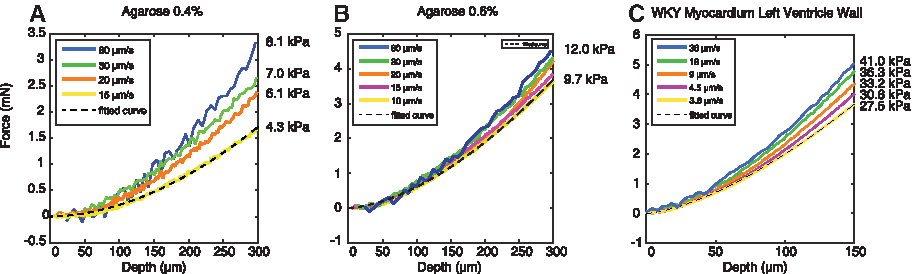
The indentation rate can affect the effective modulus obtained through the Hertz contact model for
This effective modulus is challenging to compare across experiments, tissue, and laboratories because it depends on the indentation rate.16,41,46 For soft matter, higher indentation rates result in less time for energy dissipation and thus a higher apparent stiffness (Fig. 6). The magnitude of this effect varies depending on the material, further affecting comparison and interpretation. For 0.4% agarose hydrogels, a fourfold change in indentation rate can result in a twofold change in the obtained effective modulus (Fig. 6A), while a tenfold increase in rate results in a 50% increase in the estimated effective modulus of rat left ventricle tissue (Fig. 6C). These relationships between rates and moduli are not consistent across materials, making this strain-rate dependence challenging to generalize and potentially leading to erroneous comparisons: compliant materials tested at high strain rates could appear comparable to stiffer materials tested at low strain rates.
Surfaces should also be frictionless and smooth to use the Hertz model; we use a ruby hemisphere with a smooth optical finish. No adhesion is accounted for in the Hertz model; thus, modified Hertz-JKR models are often used to understand hysteresis in soft biomaterials when adhesion is expected and of interest.48–50 However, submersion of samples in media seems to mitigate “snap-in” (Fig. 4), so we proceed with the unmodified Hertz equation to derive an effective modulus rather than attempting to describe the surface properties in more detail.
The Hertz-derived transient modulus decays to the strain-rate-independent SSM
For mesoscale indentation relaxation experiments, we found that the forces rapidly decayed to a steady-state value within minutes for all soft matter tested, in keeping with other applications of indentation to stress relaxation experiments. 3 Inserting this steady-state force into the Hertz model [Equation (2)] yields a modulus value that approximately matches the effective modulus value fit to force-displacement data [Equation (1)] obtained during quasistatic indentation (Supplementary Fig. S3). Given this consistency, we assumed that the rearranged Hertz equation is also useful to derive a time-dependent transient modulus as in Equation (3). The transient modulus does in fact decay to a strain-rate-independent SSM for all biological materials that we have tested, including decellularized porcine kidney (Fig. 7), rat myocardium, 12 and human tumors.13,14 The concept of such an infinite, equilibrium, or aggregate modulus is widely applied to viscoelastic and poroelastic materials and models. The reader is directed to the reviews by Chen et al. 17 and Oyen and Cook 51 for excellent discussion of visco/poroelastic constitutive models and analysis of transient nanoindentation data, respectively. Furthermore, the transient-modulus-derived SSM yields similar effective modulus values to that of quasistatic loading (low strain rate; Supplementary Fig. S3A), and the initial transient modulus matches effective modulus values for instantaneous loading conditions (high strain rate; Supplementary Fig. S4).
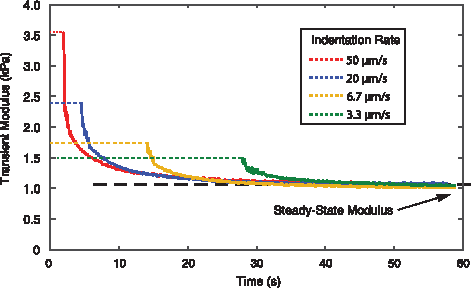
The SSM is consistent even for initial indentations at different displacement rates, revealing independence of the strain rate. The effective modulus that would have been calculated using the Hertz model (dashed lines) for the selected indentation rates yields values between 1.5 and 3.5 kPa. Sample: decellularized porcine kidney medulla cut to 1 mm thick slices and indented 100 μm at the designated rate. SSM, steady-state modulus. Color images are available online.
Given the broad range of mechanical properties targeted by the tissue engineering community, a wide range of strain rates and constitutive models remain relevant. However, many groups utilize similar materials for different purposes, so reporting steady-state or quasistatic parameters will help the community compare data across projects, tissues, and scaffolds. Performing stress-relaxation experiments, fitting transient data to visco/poroelastic models, or performing quasistatic indentation with optical methods19,24 will yield SSM and other quasistatic parameters that would be more comparable across methods and models. Future tissue engineering applications will dictate whether a given material's response to either low or high strain rates is notable, for example, low-strain-rate expansion during development versus high-strain-rate shock waves through the brain. In any case, the transient modulus approach provides these and intermediate response values from only one relaxation experiment, in stark contrast to a single indentation–retraction pass yielding one strain-rate-dependent metric that may not be comparable with other laboratories, materials, or experiments. However, more complex and nuanced experiments, contact models, and constitutive models are still needed to create parameters appropriate for computational models of time-dependent loading conditions.
The stress relaxation modulus can be fitted to various constitutive models and still yield similar SSM values
Constitutive models that accurately describe time-dependent tissue behavior continue to challenge the biomaterials and biomechanics communities and require increasing levels of complexity (as discussed, e.g., by Oyen and Cook 51 ). To characterize the consistency of the SSM across indentation experiments and models, we used three different time-dependent constitutive models to fit the transient modulus to determine the SSM (Supplementary Table S3). While these common constitutive models vary in their estimation of the initial relaxation behavior of the materials tested, they consistently describe the semi-infinite relaxation behavior and identify similar SSM values (Supplementary Fig. S5). The concept of a quasistatic modulus, despite its various names, is compatible with many constitutive models and is therefore a useful value for researchers to reference when comparing experimental methods and models and producing application-specific mechanical characterization data.
Conclusions
Indentation methods for biological materials are contentious because most contact models have been derived for purely elastic, homogenous, and isotropic materials in an adhesion-free and frictionless experimental configuration. While many of these assumptions are violated while indenting soft matter, the general relationship derived by Hertz among force, displacement, and mechanical properties notably holds true, although the exact mechanical property defined in the equation is not the elastic modulus as originally described. The strain rate can sharply alter our measurements of what the Hertz model assumes to be a property of the material—the elastic modulus. We propose that this mechanical property should be referred to as an effective modulus since it is the apparent modulus for a specific indentation rate. At very slow quasistatic indentation rates, the Hertz modulus matches the infinite modulus or SSM of the material. To use the Hertz equation for soft biological materials, millimeter-scale samples and indenter tips are recommended. Surface contact and indentation depth must be carefully controlled for the resulting values to be reliable. Furthermore, this approach is not recommended for materials that demonstrate large adhesive forces nor those known to be strongly anisotropic. A summary of our experimental and analytical recommendations for mesoscale indentation can be found in Table 2.
Summary of Recommendations for Indentation of Tissue and Scaffolds
SSM, steady-state modulus.
Rearrangement of the Hertz contact model equation introduces the transient modulus as a function of time throughout an indentation or relaxation cycle. We have demonstrated that relaxation experiments are advantageous, as they can yield multiple metrics that can be compared to other quasistatic quantities, unlike strain-rate-dependent values calculated from loading–unloading cycles. The transient modulus is a useful construct and reasonable rearrangement of the Hertz modulus as demonstrated experimentally in three ways. First, the Hertz effective modulus fit to an “instantaneous” loading is close to the same value as E(t = 0) using transient modulus data fit to Equation (4) (Supplementary Fig. S4); that is, near-instantaneous loading conditions result in similar values for the effective modulus from the original Hertz equation and from the transient modulus evaluated at t = 0. Second, slow indentations that use loading times higher than relaxation times yield an effective modulus for quasi-steady-state conditions. This effective modulus matches values calculated for the SSM (Supplementary Fig. S3A). Finally, the effective modulus for any given strain rate matches the average of the transient modulus during the loading stage of the indentation (Supplementary Fig. S2B). These three demonstrations suggest that time-dependent rearrangement of the Hertz equation is reasonable within the experimental constraints discussed to yield a useful transient modulus.
There is a substantial risk to promoting Hertz contact models for soft matter in that the initial indentation modulus or effective modulus may continue to be discussed as an elastic modulus, undesirably obfuscating the role of porous or viscous relaxation. However, many disciplines, and tissue engineering in particular, 1 have long communicated a desire for simple, standardized ways to characterize mechanical properties of biological materials. This transient modulus and its semi-infinite SSM can be used to compare small, irregular samples of soft matter to design replacement materials and tissues in a straightforward manner. In addition, we show that the SSM can be constitutive-model independent; thus, its reporting alongside complex constitutive models can support the diverse goals of researchers interested in mechanical properties for computational biomechanics, tissue engineering, biomaterials, and mechanobiology.
Footnotes
Acknowledgments
The authors gratefully acknowledge partial support of this work by Medtronic (Investigator-Initiated Grant to C.S.S.), the National Science Foundation (CMMI-BMMB 1636007 to C.S.S.), and the University of Florida's Pittman Fellowship of the Institute for Cell and Tissue Science and Engineering (A.R.). We thank John M. Maloney for valuable editorial input.
Disclosure Statement
No competing financial interests exist.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.