
Abstract
Objective
To better study human motion inside the space suit and suit-related contact, a multifactor statistical model was developed to predict torso body shape changes and lumbar motion during suited movement by using fabric strain sensors that are placed on the body.
Background
Physical interactions within pressurized space suits can pose an injury risk for astronauts during extravehicular activity (EVA). In particular, poor suit fit can result in an injury due to reduced performance capabilities and excessive body contact within the suit during movement. A wearable solution is needed to measure body motion inside the space suit.
Methods
An array of flexible strain sensors was attached to the body of 12 male study participants. The participants performed specific static lumbar postures while 3D body scans and sensor measurements were collected. A model was created to predict the body shape as a function of sensor signal and the accuracy was evaluated using holdout cross-validation.
Results
Predictions from the torso shape model had an average root mean square error (RMSE) of 2.02 cm. Subtle soft tissue deformations such as skin folding and bulges were accurately replicated in the shape prediction. Differences in posture type did not affect the prediction error.
Conclusion
This method provides a useful tool for suited testing and the information gained will drive the development of injury countermeasures and improve suit fit assessments.
Application
In addition to space suit design applications, this technique can provide a lightweight and wearable system to perform ergonomic evaluations in field assessments.
Introduction
Space suits are an important hardware component in human spaceflight that enable astronauts to perform spacewalks or extravehicular activity (EVA). In addition to sustaining life, space suits are designed to provide protection, mobility, and comfort for astronauts in hostile environments. Because space suits are pressurized, they are extremely stiff and difficult to move. As a result, space suits can increase fatigue and task demands by adding mass, limiting range of motion, and reducing strength (Carr & Newman, 2007; Morgan et al., 1996).
Suboptimal or poor suit fit can facilitate or aggravate musculoskeletal disorders such as microgravity-induced low back pain (MGI-LBP; Sayson & Hargens, 2008) and shoulder injury (Scheuring et al., 2009; Williams & Johnson, 2003). For example, a 2003 report suggested that movement that was restricted by the scye opening (shoulder bearing) orientation on an incorrectly sized hard upper torso could lead to injury (Williams & Johnson, 2003). Additionally, poor fit can cause astronauts to experience discomfort, contusions, and abrasions that result from continuous contact and rubbing against the suit (Scheuring et al., 2009; Strauss, 2004).
For microgravity EVA, shoulder stresses have been identified as a significant risk factor for crew members in the traditional Shuttle Extravehicular Mobility Unit (EMU) space suits (Williams & Johnson, 2003). With the proposed lunar EVA missions, however, lower body mobility in planetary space suits is also expected to be critical to mission success and injury risk mitigation. In particular, lunar EVA tasks may involve lifting, crouching, and kneeling work postures where torso and waist flexibility are required. Proper space suit design will require careful suit-bearing configurations and material property selection to minimize mobility restrictions. Poor suit waist mobility will increase task demands, awkward postures, and musculoskeletal loading. Since crew members may perform physically demanding upper and lower body activities such as manual materials handling, instrument setup, and geological tasks, low back injury risk is a large concern during EVA. If a low back injury occurs, the astronaut’s ability to perform EVA will become further reduced. Thus, it is important to understand the torso and low back movement mechanisms inside the suit. Previous space suits such as the EMU have very little low body mobility, so torso movement inside the suit has been largely unknown.
Proper suit fit is also necessary to maximize performance, as it can directly influence the biomechanics of the astronaut inside of the space suit. Motion inside a space suit is different from natural biomechanical movement due to joint bearings and soft goods (nonrigid and textile-like components of the suit such as the arms and legs) that impede full mobility. For example, improper alignment with the joint bearings can reduce performance capabilities and decrease biomechanical leverage inside of the suit (Ross, 2013). Thus, performing repetitive motions or tasks with a poor suit fit can escalate discomfort and musculoskeletal injury risk.
Assessing the effect of suit fit during EVA motions is challenging because the space suit fit is unique for each astronaut. Body shapes and dimensions can be very different between individuals. Current and future astronauts are selected from a diverse population with a wide range of anthropometry (Benson & Rajulu, 2009; Currie & Graziosi, 2003). As custom space suits are not available to each person, some individuals will have a suboptimal suit fit, which can increase suit-to-body contact and interference with the suit, resulting in increased risk of injury during EVA.
Although external movement of the space suit has been well-researched (Morgan et al., 1996; Newman et al., 2000; Norcross et al., 2010), very little is known about how each astronaut moves and interacts within the space suit. Due to volumetric constraints imposed by the space suit, wearable garments were used for data collection inside of the suit in place of bulky motion capture systems. Studies have obtained useful shoulder and contact data using pressure mats and instrumented garments (Anderson & Newman, 2015; Reid et al., 2014). Performance of different space suit gloves have been measured using various sensors placed on the hand (Bishu & Klute, 1995).
Textile-based wearable sensors provide a practical approach to measuring kinematics for a variety of research fields, ranging from healthcare (Metcalf et al., 2009) to robotics (Totaro et al., 2018). These type of sensors consist of a low-profile sensing element that is embedded into a textile substrate. Thus, the sensor properties facilitate integration into a garment and enables unobtrusive kinematic measurements, as the sensors will conform and stretch with the body. Many prototype applications have been developed for kinematic measurements (Mengüç et al., 2013; Saucier et al., 2019) and gesture analysis (De Rossi et al., 2000; Lorussi et al., 2004). The StretchSense (StretchSense, Auckland, New Zealand) sensor, a strain-based fabric sensor, has been used to measure joint motion such as knee and wrist flexion (Huang et al., 2017; Poomsalood et al., 2019).
Recently, a system involving fabric strain sensors, which can be integrated into a garment, was developed to provide kinematic measurements during suited motion. The strain sensors yield a capacitance measurement that increases with the sensor elongation. Previous studies have concentrated on predicting lumbar joint angles from fabric strain sensors that were adhered to the back (Vu et al., 2019, 2020). In these studies, lumbar joint angles were calculated from the relative rotation of local reference frames (derived from anatomical landmark positions) that were attached to the thoracic cavity and the pelvis. Torso motions were represented by planar Euler angles: sagittal flexion, lateral bending, and axial rotation. However, as lumbar motions are the outcome of complex interactions across multiple joints along the spinal column, motions represented by Euler angles may not provide sufficient accuracy to fully describe the body position and body surface geometry inside the space suit. Furthermore, lumbar joint angles cannot fully describe the contact and clearance between the space suit and body, which is critical for suit fit and comfort. Therefore, predicting and characterizing how the overall lumbar surface geometry changes inside the space suit, in addition to joint angles, is necessary. The lumbar region can experience considerable body shape and surface deformation between different bending postures, producing large and distinctive patterns of strain sensor signals across multiple sensors. For sensors placed across the torso, different groups of sensors would produce unique sensor activation patterns in different postures. For example, when a person bends forward with the sensors, the sensors placed vertically along the lumbar spine may show the largest signal increase. The observation of signal patterns during different postures was explored in greater detail in Vu et al. (2020). Thus, these characteristic signal patterns are advantageous and can be useful for producing a model capable of predicting lumbar shape.
Body surface shape is often determined by using machine learning methods to extract the body shape from images (Bogo et al., 2016; Kanaujia et al., 2011) or by using infrared depth cameras systems/scanners (Shotton et al., 2013; Zhang et al., 2014). The accuracy with these image and depth camera systems is much greater with vertex errors that are within 1 cm (Wang et al., 2012). However, these type of systems are visually obstructed by the suit itself and cannot determine the exact body position inside the suit. The wearable approach to estimating body shape is fairly novel, as there is very little literature on estimating body surface shape from textile-based sensors. In similar applications, textile sensors have been used to assess lumbar joint angles (Bakhshi & Mahoor, 2011), spinal curvature changes (Taylor et al., 2010), and skeletal joint configurations (Mattmann et al., 2007), which corroborates with our general approach.
In this study, a method to predict overall torso shape and geometry from strain sensors placed on the body surface was proposed to ultimately measure the motion and suit-to-body interactions inside a space suit. A statistical prediction model was constructed from a data set containing strain sensor measurements and 3D body scans of different lumbar postures that were collected simultaneously. Predicted torso shape variations were compared to the raw scans to assess the validity of the model using different metrics including root mean square error (RMSE) calculations. The model can be used to provide information that will help improve space suit design and inform the development of countermeasures that can mitigate injury in astronauts, particularly injuries associated with lumbar movement during dynamic tasks. The model will also provide a starting point to aid the efforts to quantify suit fit during EVA motions. This model can also be used in civilian applications as a means to measure lumbar motion in environments where traditional motion capture is not feasible, such as industrial factories or outdoors construction areas. The information gained from this tool can be used for ergonomic and low back injury assessments.
Methods
Study Participants
Volunteer participants (12 males; age 21–52 years) with a body mass index (BMI) between 18.5 and 24.9 participated in the Institutional Review Board (IRB)-approved study. The study volunteers were recruited from the Johnson Space Center (JSC) active test subject pool. Males with similar BMI were selected to limit inter-subject variability between body shapes that may be introduced in the model. Once validated, the study will be expanded to include different genders and anthropometry. All participants were healthy and did not have low back symptoms or injury. This research complied with the American Psychological Association Code of Ethics and was approved by the IRB at NASA Johnson Space Center. Informed consent was obtained from each participant.
Data Collection
On test day, participants were provided with compression shorts and asked to remove their shirts. Paper stickers that were 1.25 cm in diameter were placed on anatomical landmarks on the torso (Figure 1). The landmarks were located on the pelvis, back, chest, and shoulders, which were palpated and identified by the study investigators. The light blue color of the stickers allowed for semi-automatic landmark labeling during postprocessing. Specifically, the color texture map associated with each scan was filtered to isolate the pixels containing similar hues to the sticker patches placed on the skin. Afterwards, the center of each pixel cluster was located by a blob detection algorithm and landmarks were assigned to the identified cluster centers.

Images of the sensor and paper sticker placement on a study participant.
Ten StretchSense fabric-based strain sensors (StretchSense, Auckland, New Zealand) were adhered to the torso with elastic kinesiology tape (KT Health LLC, Utah, USA). The sensor locations on the body were adapted from the study performed by Mokhlespour Esfahani et al. (2017), where the authors aimed to maximize textile sensors elongation in different lumbar pose variations (Figure 1). This specific sensor configuration seemed to perform well in Vu et al. (2020). Measurements were collected at a 100-Hz sampling rate by a data collection module that was secured to the thigh via athletic wrapping to avoid adding superfluous geometry to the torso.
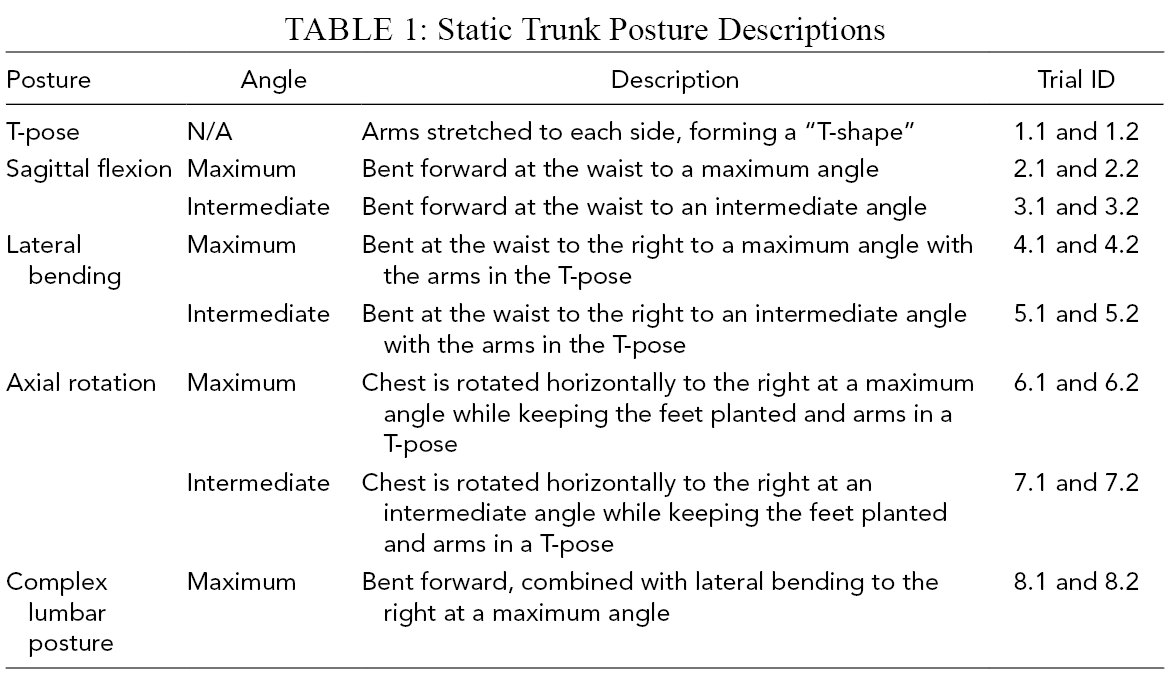
Participants performed a series of static torso postures inside the capture volume of a 3dMD optical whole-body scanner (Atlanta, GA, USA). The scanner uses photogrammetry via 12 camera modules to capture both 3D geometry and color texture. Participants assumed eight different static torso postures twice, for a total of 16 postures per participant (Table 1). Participants performed sagittal flexion, lateral bending, and axial rotation postures at the maximum angle the participant could bend in the prescribed direction and a subjectively selected intermediate angle. Participants assumed each posture with arms abducted, palms facing downwards, and feet together. For each posture, sensor measurements and 3D body scans were collected after a stable position was reached. More details on this posture set can be found in Vu et al. (2020), where the posture set was defined.
Static Trunk Posture Descriptions
Scan Postprocessing
The identified marker positions on the scan were manually matched and labeled with the corresponding anatomical landmarks. Scans were segmented at planes located at the gluteal fold, thyroid cartilage (Adam’s apple), and the left and right axilla to remove the head, arms, and legs from the scan. Cross-sections were created at horizontal and vertical levels between anatomical landmarks. For each cross-section, virtual landmarks were automatically generated on the cross-section outline at 25%, 50%, and 75% of the distance between landmarks (Figure 2C). The virtual markers were created to increase the accuracy of the template fitting and parameterization process. All of the postprocessing steps are illustrated in Figure 2.
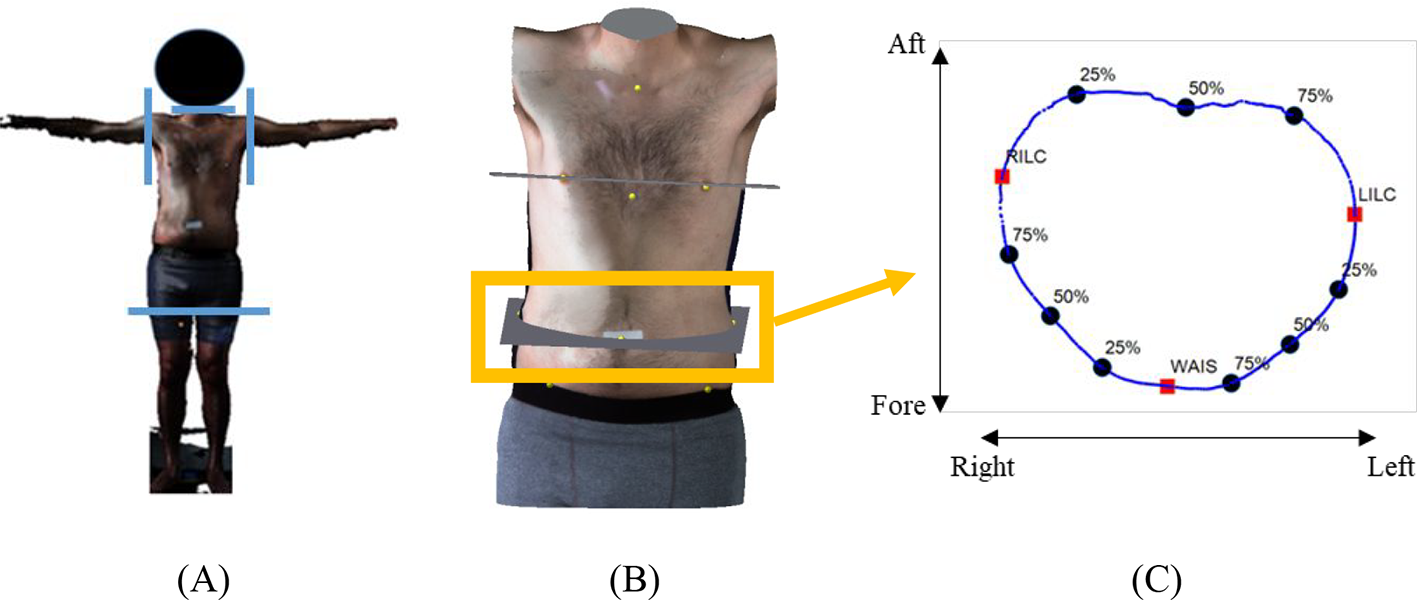
Images from postprocessing steps. (A) Raw scan with planes for segmentation identified (blue). (B) Segmented torso. (C) Virtual markers generated at the waist cross-section location. LILC = left iliac crest; RILC = right iliac crest; WAIS = umbilicus.
A uniform reference geometry (“template”) mesh was modified from a 3D human geometry containing 10,777 vertices that was developed from the U.S. Army Anthropometric Survey (ANSUR) database (Gordon et al., 2014). The template was segmented in the same anatomical planes as the processed scans (gluteal fold, thyroid cartilage, left and right axilla). Thus, the final template had a total of 3,940 vertices.
For each scan, the template was aligned and fitted to the scan surface. The fit was obtained by aligning the anatomical landmark locations of the template to the anatomical locations on the scan via radial basis function (RBF) interpolation. RBF interpolation is a neural network method that approximates vertices by Equation (1), which minimizes the thin-plate spline function (f) for a transformation over a set of given points (Bookstein, 1986).

RBF has been shown to effectively translate point-to-point correspondence of a human body template to the surface of a scan, replicating the overall structure (Seo & Magnenat-Thalmann, 2003; Wang, 2005). The differences between the morphed template and the original scan were evaluated and found to have an average morphing error of less than 1.0 cm across all postures.
Modeling and Validation
Data Partition
The model development and validation were performed using a holdout cross-validation method (Arlot & Celisse, 2010). Specifically, from 16 trials of each participant, eight trials were assigned as a training data set (96 trials total for all 12 subjects) and five trials were assigned as a test data set (60 trials total). The training set and test set trials were sampled from each pose replication. Three trials consisting of intermediate sagittal flexion, lateral bending, and rotation were assigned as the calibration set data (36 trials total). Intermediate joint excursions were selected because greater subject-specific variability was observed in the intermediate excursion ranges across these three “primitive” types of joint angle manipulations. The statistical model was developed using the training set and validated using the test set data.
Statistical Modeling
A multilayer statistical model was constructed to estimate the template-fitted body shape from the sensor measurements. To reduce the data dimensionality, principal component (PC) analysis was applied separately to the flattened vertex coordinates (3940 vertices × three Cartesian coordinates) of the template-fitted body shapes and sensor measurements (10 sensor capacitance readings × 1 trial measurement) in the training set data. The training set data consisted of a collection containing one of each type of posture replication from all subjects (Trial IDs: 1.1, 2.1, 3.1, . . . , 8.1). The first 10 and five PC scores (largest eigenvalues) were selected from the template vertex coordinates and sensor measurements PC analysis, respectively. The PC scores accounted for 94% and 90% (respectively) of the variability in the template vertex coordinates and sensor measurements. Since PC analysis reduced the multi-collinearity between the sensor values and vertex measurements, linear regression was then selected to characterize the underlying model and strong correlations. For each i-th participant, a participant-specific prediction model (F i ) was constructed via multivariate linear regression to predict body shape PC scores (Body PCi with a matrix size of 10 body PC scores × eight trials for i-th participant) from sensor PC scores (Sensor PCi with a matrix size of five sensor PC scores × eight trials for i-th participant) as represented in Equation (2). Thus, F i had a matrix size of 5 × 10 and b i ,1, b i ,2, b i ,3 . . . , b i ,5 each had a vector size of 10 × 1.

where: F i = b i ,1 Sensor PCi,1 + b i ,2 Sensor PCi,2 + b i ,3 Sensor PCi,3 … + b i ,5 Sensor PCi,5.
To adjust for participant-to-participant differences, individual calibration matrices (Calibration PCi) were constructed. Sensor and body shape measurements were obtained from the individuals’ calibration set data. Body PC and sensor PC were computed using an inverse PC transformation and projecting the data onto the existing PC spaces. The existing PC spaces were obtained from the original PC analysis (i.e., eigenvectors) performed with the flattened vertex coordinates and sensor measurements in the training set data. The body PC and sensor PC were calculated for each trial in the calibration set data, which were composed of three trials in different postures sampled from each participant (Trial IDs: 3.2, 5.2, 7.2). For each calibration set trial, the body PC and sensor PC were concatenated (15 combined body and sensor PC scores × one trial). For the i-th subject, all three trials were joined to form Calibration PCi (45 total PC scores × one subject). A general prediction model (G1, G2, G3,…, G5) was constructed to predict regression coefficients (b1, b2, b3,… , b5) of the subject-specific models Fi (Equation (2)) from Calibration PCi via multivariate regression (Equation (3)). Each prediction model (e.g., G1, G2, G3,… , G5) had a matrix size of 10 × 45.

Model Prediction and Validation
To estimate each subject’s torso shape in the test set data, the Calibration PCi (45 body and sensor calibration PC scores × one i-th subject) was obtained from the subject’s calibration scans. For each participant, the coefficients (b0, b1, b2,… , b5) of the subject-specific model (F i ) were determined using the general prediction model (G1, G2, G3,… , G5) and Calibration PCi (Equation (3)). After F i and its coefficients were determined, the raw sensor measurements belonging to each subject in the test set were transformed into PC scores using the existing sensor PC space. The resultant F i models then predicted body shape PC scores as a function of the test set sensor PC scores (Equation (2)). An inverse PC transformation was applied to predicted body shape PC scores to reconstruct the torso body shape using the original body PC space (i.e., eigenvectors) created during the initial model development.
During validation, the developed model was used to predict body shape from sensor measurements in the test set data. The prediction error was defined as the linear distance between the vertices in the predicted model and corresponding vertices in the scan as determined by a k-nearest neighbor search. The RMSE of the prediction errors was calculated to evaluate prediction accuracy and quality of mesh estimation. Specifically, the RMSE error was obtained from differences between the 3940 vertices in the predicted body mesh and the original scan. The RMSE was averaged across subjects and reported in the Results section. A one-way between-subjects ANOVA was conducted to compare the effect of different postures (independent variable) on RMSE prediction error (dependent variable), using one RMSE value per subject per posture.
Results
Across postures, the predicted body shape geometry was compared to original scans in the test set (Figure 3). The curvature and skin deformation of the torso appears to be reproduced in the predicted shapes. For example, skin folding or bulges on the right side of the torso (Figure 3C) and on the abdomen (Figure 3D) were observed in the original scans and replicated in the predicted body shapes. Additionally, the overall predicted torso articulation seemed to closely match the original scans.
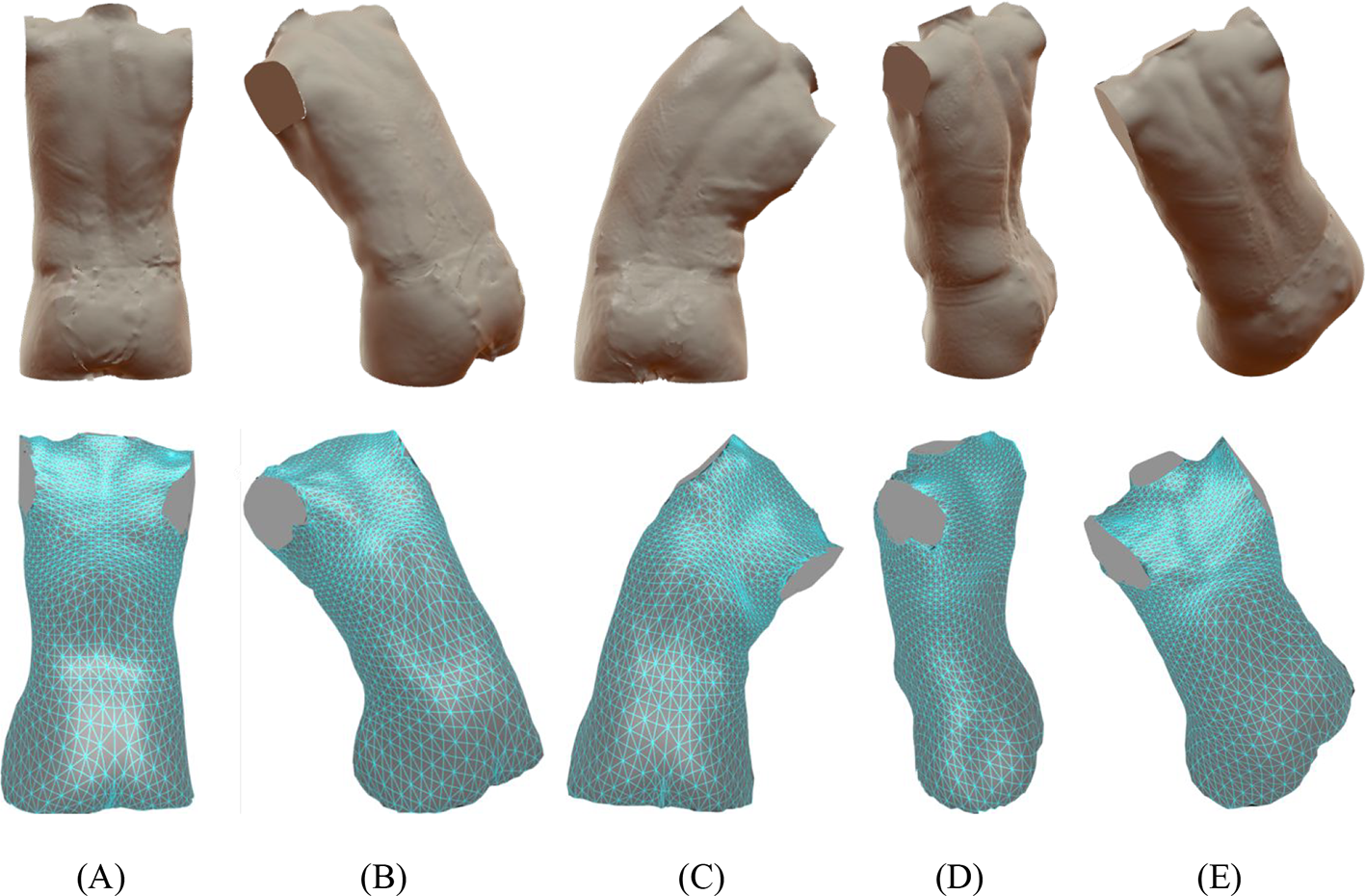
Comparison between predicted and original scans. The original scans (top row) and predicted body shape (bottom row) for a representative subject in different postures is shown in the figure. (A) T-pose. (B) Forward flexion. (C) Lateral bending. (D) Axial rotation. (E) Complex lumbar posture.
Prediction errors across the body shape geometry were quantified. The prediction errors are illustrated in Figures 4 and 5. In the T-pose, specifically, 80% of the observed prediction errors were below 2.00 cm (Figure 5). For flexion, lateral bending, and rotation postures, 80% of the prediction errors were below 3.73, 3.86, and 2.84 cm, respectively. In the complex posture, 80% of the errors were below 4.14 cm, which were slightly larger than the other postures. Generally, the greatest prediction errors were concentrated in the shoulder and pelvis regions, while prediction errors were smallest in the lumbar region.
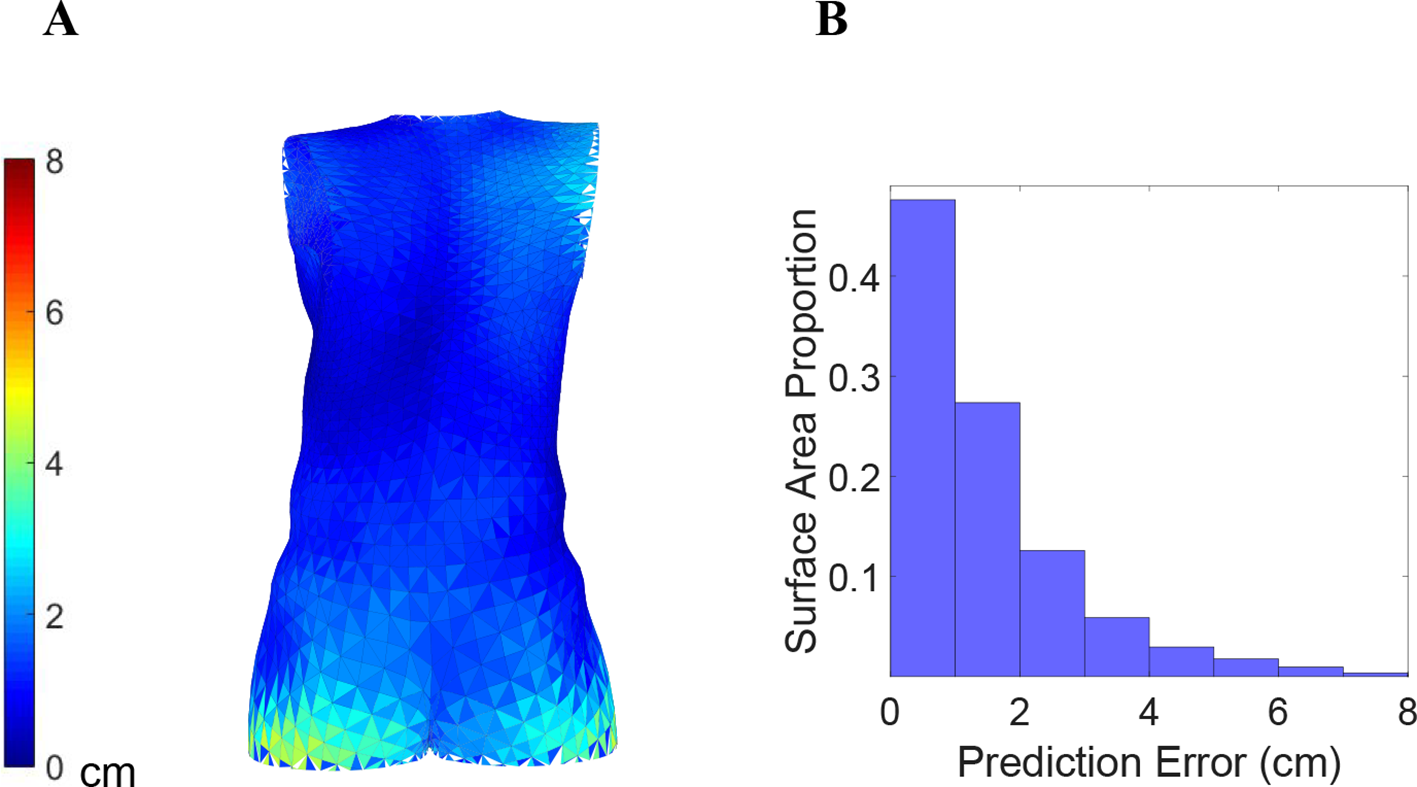
T-pose prediction errors. (A) Color-coded prediction error averaged across participants. (B) Prediction error histogram.
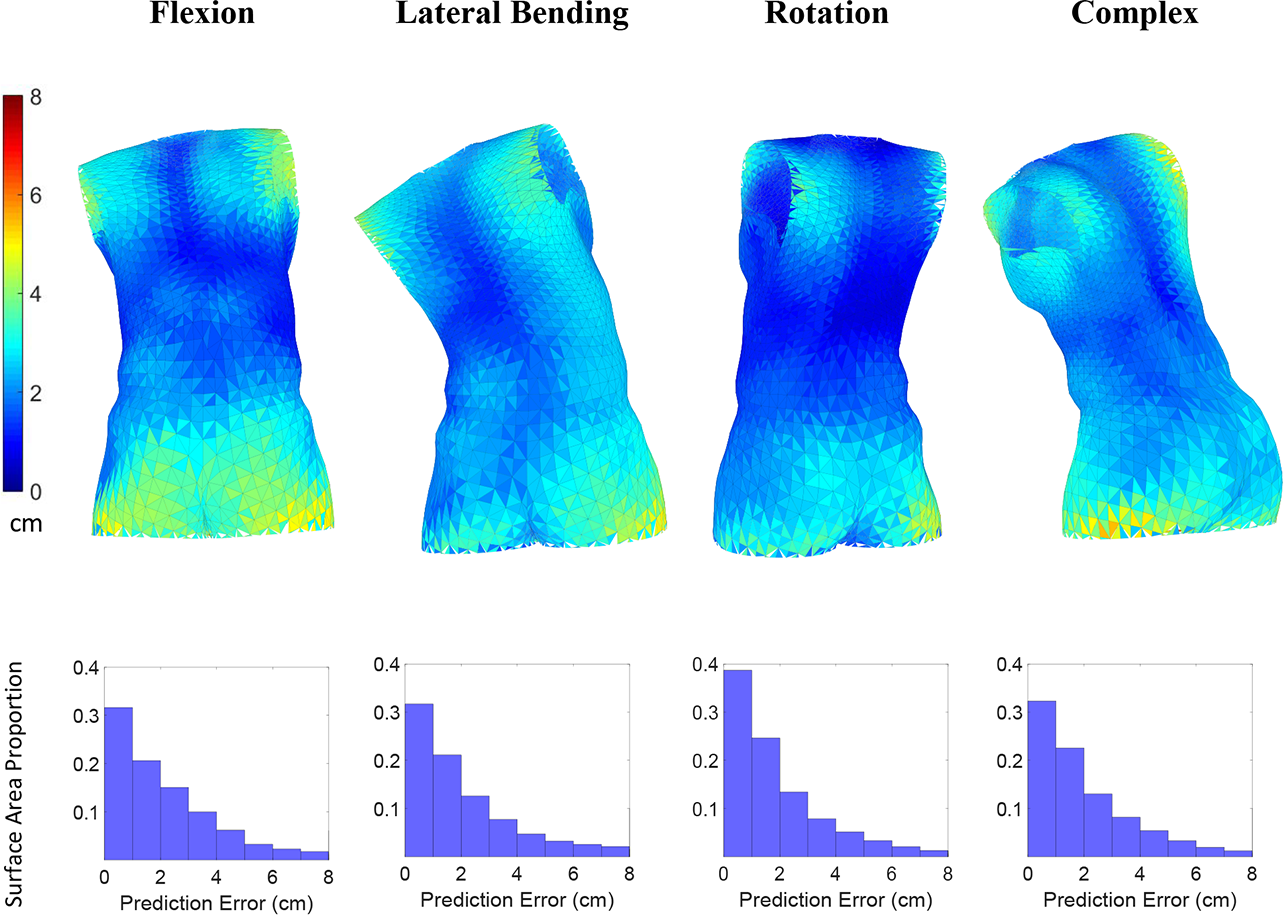
Lumbar posture prediction errors. Color-coded prediction errors for different lumbar postures (top panels) and the corresponding histograms (bottom panels). Errors were averaged across all participants.
The RMSE were calculated from prediction errors, and then averaged across all participants. The RMSE and statistical test summary are reported in Table 2. The overall RMSE, averaged across all postures, was 2.02 (SD: .80) cm. Differences between posture type did not have a significant effect on prediction error (F[4, 55] = 1.02, p = .41) at a .05 significance level.
RMSE and Statistical Difference Across Postures
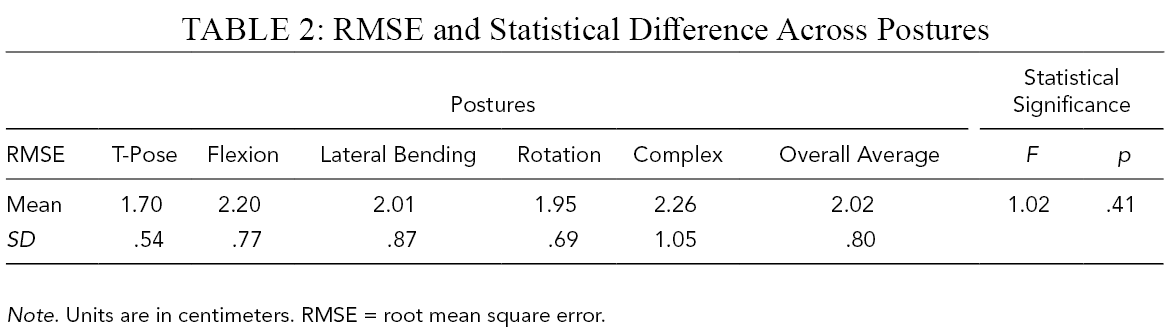
Note. Units are in centimeters. RMSE = root mean square error.
Discussion
The statistical model developed in this study provides a method to predict torso shape and posture using fabric strain sensors. This system has the potential to provide kinematic assessments of a person inside of the space suit and information on the suit-to-body interactions. The predicted torso shape was compared to the scan geometry for all postures and an average RMSE of 2.02 cm was observed. Roughly 80% of observed vertex errors were less than 4.14 cm. There seemed to be small variations in RMSE between postures, but the differences were not statistically significant. The developed model builds on the previous work (Vu et al., 2020) by utilizing stretch sensors to predict complex body shape variations and tissue deformation, whereas previous models were capable of only joint angle predictions.
The accuracy needed for fit assessments can differ across areas of the body. For example, areas on the body with bony landmarks may need greater accuracy for proper fit assessments. Thus, further work is needed to understand if the model can provide sufficient accuracy, depending on the need, across different regions of the body. The body shape prediction accuracy in this study seemed to differ across different regions of the torso, which can be seen in the color-coded prediction error images (Figures 4 and 5). Greater prediction accuracy was observed in the lumbar region, while lower prediction accuracy was observed in the shoulder and lower pelvis region. As there are only a few landmarks in the pelvis and shoulder region, it was difficult for the morphing procedure to accurately represent the lower pelvis and shoulder geometry. More importantly, the variations of the shoulder and upper torso geometry may not be completely captured by the lumbar postures used in this study. As the sensors were concentrated in the lumbar region, the measurement surface over the pelvis and shoulder was much smaller in comparison. Therefore, it is hypothesized that subtle shoulder and upper body movements such as internal rotation would not produce substantial changes in sensor signals and not be distinguishable by the model. Future studies can further refine the shoulder and pelvis region prediction models by increasing the number of sensors and anatomical landmark positions across the torso.
However, given that the scope of this study focused on lumbar movement and lumbar postures, the overall prediction accuracy was considered acceptable. Movements with the space suit are achieved through the activation of mechanical joints. Fine body movements can be difficult to perform due to pressurization of the suit and the overall kinematics are often large and coarse. Thus, the level of accuracy achieved by this system can be practically useful for understanding how the body moves and what postures may be observed during suited motion. The current system is capable of providing a general idea of what areas on the body may have fit or mobility issues.
Although the sensors functioned adequately during the study, it is unknown how suited testing will affect sensors. Environmental factors inside the space suit such as high temperature and humidity can cause changes to skin deformation properties and also cause sensor hardware complications. Donning of the liquid cooling ventilation garment and ingress into the space suit can impart shear forces on the sensors, resulting in altered sensor placement and performance. Extraneous contact forces on the sensors from inside the suit can introduce noise into the sensor signal and affect the prediction accuracy of the statistical model. Thus, the effects of the space suit on sensor noise will need to be studied further.
The prediction model developed here can be useful for examining motion and body shape deformation inside of a space suit with the StretchSense strain sensors. However, further development will need to focus on expanding the model for diverse anthropometry dimensions. Initially, males were tested to examine if the methodology was feasible with subjects that have minimal body shape variation under controlled conditions. Since positive outcomes were observed from this test, future studies are planned to incorporate female subjects as smaller females may have different suit fit issues. Given the similarities between participant anthropometry in this study, estimation accuracy of the current model may degrade across populations with different anthropometry dimensions. With more data across different body shapes, important factors for the morphology, such as gender and muscularity, can be represented. A more comprehensive study with a larger group of subjects with diverse body shapes can provide a better understanding of model characteristics and bias across different body shapes and postures. For example, the model may underestimate flexion postures for individuals with a longer torso. Additionally, this information is important for fit assessments to understand which areas on the body may be underpredicted or overpredicted. The data and results from this study can be used to refine the model and improve the generalizability.
Future work includes integrating the sensors into a tight-fitting garment to improve ease of use and possibly mitigate issues with tape adhesion and sensor placement. This would facilitate suited pilot studies that can be conducted to better understand sensor performance inside of a space suit. The model was tested on static 3D postures and needs to be validated on postures observed during dynamic movements. Motion capture studies can be used to validate the performance of the model, particularly during dynamic tasks. Furthermore, the model can be improved with the inclusion of extra rotational and complex postures to incorporate additional complex sensor activation patterns. Collecting additional postures would improve the model’s ability to more accurately reproduce the subtle torso shape changes. From the future study results, the statistical model and calibration method can be refined to mitigate and correct for noise. To optimize calibration specificity, different subsets of calibration postures should be tested, which can improve model sensitivity and accuracy. Additionally, a PC sensitivity analysis should be performed in the larger study to quantify subject differences and optimize PC selection.
The developed method will enable engineers and designers to better understand how the torso moves inside the suit and reduce injury risk during EVA. Suit engineers can use this system to supplement subjective fit reports with objectively quantifiable suit fit assessments. Suit components can be designed to account for the postures observed during different EVA tasks and improve mobility. Furthermore, padding configurations inside the suit can be optimized to minimize torso contact pressures. Medical doctors can use this system to monitor low back postures and duty cycles during EVA training.
The technology developed in this study has applications outside of aerospace. In ergonomic applications, this wearable technology can be used to perform objective and quantitative assessment of kinematics. Specifically, the developed technology can be used to assess work posture and repetition rates during a task without adding substantial weight or reducing range of motion of the wearer. For example, lumbar twisting velocity was measured using an exoskeleton-type device worn on the back, which has been identified as a risk factor for low back injuries (Marras et al., 1995). Recently, lightweight and less invasive forms of wearable mobile sensors have been used to measure awkward postures from construction workers (Nath et al., 2017) and nurses (Noma et al., 2004; Smith et al., 2011) in an occupational setting. Wearable sensors have been integrated into commercially available biofeedback systems for self-monitoring and real-time feedback on workers’ postures as an ergonomic risk intervention technique (Yoong et al., 2019). The collected ergonomic data can be used to redesign jobs to minimize risky postures and reduce injury risk. In the rehabilitation field, these sensors may be used for therapy to target specific exercise motions and measure performance (Bonato, 2005).
Conclusion
In this study, a method for estimating torso and lumbar geometry from strain sensor measurements was developed. Torso shape was estimated as a function of the strain sensor signals and information from a set of calibration postures. Overall torso shape was predicted at an average of 2.02 cm RMSE from the scans. Prediction accuracy will differ depending on factors such as specific local regions on the torso and subject anthropometry. With further development and validation, the method developed here can serve as a means for assessing suit fit and body shape deformation during suited EVA motions. Ultimately, the outcome can help lower injury risk by providing a method for researchers to better visualize torso motion inside the suit, improving the design of future injury countermeasures.
Key Points
Understanding how the body moves inside the space suit is needed to improve space suit fit and mitigate injury.
A wearable system using flexible strain sensors was proposed to estimate body shape using a multifactor statistical model.
An average RMSE of 2.02 cm was observed from the torso prediction model.
The developed method can be refined and improved with additional suited testing, inclusion of data across different body shapes, and integration into a tight-fitting garment.
Footnotes
Acknowledgments
We have no conflicts of interest to disclose. This study was partially funded by NASA HHPC NNJ15HK11B, USA.
Author(s) Note
The author(s) of this article are U.S. government employees and created the article within the scope of their employment. As a work of the U.S. federal government, the content of the article is in the public domain.
Author Biographies
Linh Q. Vu, is a human factors design engineer for MEI Technologies in the NASA JSC Anthropometry and Biomechanics Facility. He received his MS in industrial engineering at the University of Houston in 2018.
Han Kim is a senior human factors design engineer for Leidos Inc. in the NASA JSC Anthropometry and Biomechanics Facility. He received his PhD in industrial and operations engineering at University of Michigan in 2005.
Lawrence J. H. Schulze is an associate professor in the Department of Industrial Engineering at the University of Houston. He received his PhD in industrial engineering for ergonomics, safety, human factors, and industrial hygiene at Texas A&M University in 1989.
Sudhakar L. Rajulu is the technical monitor of the NASA JSC Anthropometry and Biomechanics Facility. He received his PhD in industrial engineering for human factors and ergonomics at Ohio State University in 1990.