
Abstract
The main content dealt with in this paper was to carry out a theoretical analysis of the damping property of spacer fabric used as cushion materials. A free vibration test was conducted and the corresponding model was established based on a single-degree-of-freedom (SDOF) system by considering the viscous–elastic behavior of spacer fabric during free vibration. Displacement–time curves of spacer fabric were calculated by a second-order integral of acceleration and time curves recorded by an accelerator sensor. Then, vibration indexes, including the damping ratio, damping coefficient, logarithmic decrement and free vibration period, were featured based on a SDOF model. The experimental results of damping ratio and displacement–time curves were compared with the theoretical results. It indicated that the vibration model was effective to characterize the free vibration of spacer fabric. Moreover, the effects of different structural parameters, including thickness, filament diameter, area density and inclination angle and arrangement of spacer filaments, of the spacer fabric on the damping property were also investigated. This is helpful to better design spacer fabrics with a good damping property.
Spacer fabric is a kind of textile material with a special sandwich structure, consisting of an upper layer, a bottom layer and one middle layer whose flexible filaments tightly link the bottom and upper surface layers. 1 Spacer fabric is widely used as mattresses and filling material for wheelchairs in automobiles and trains due its light weight, good permeability and outstanding pressure distribution performance. 2 Some researchers have also studied the antimicrobial and water repellent properties of spacer fabric as a medical and technical textile due to those good abilities. 3 These application of spacer fabric as mattresses mainly depends on the static compression and dynamic vibration property, as well as the comfort. 4
Recently, some investigations have provided a solid basis for explaining the pressure relief mechanism under the static condition when spacer fabrics are compressed, indicating that they are superior to sponge and wool carpets, and that thicker spacer fabric is effective in absorbing compression impact energy by plate compression and spherical compression.5–9 This is due to the fact that the special sandwich structure is effective in evenly dispersing external pressure to a larger supporting area so as to relieve concentrated stresses. Much work has been done with respect to the application of spacer fabrics in cushion products.10–12 However, previous research was mainly focused on the testing and analysis of basic properties, such as the compression property, impact property, air permeability and water vapor permeability.13,14 In fact, spacer fabric is also a good substitute for polyurethane foam due to its good damping property, thermal/moisture comfort and air permeability.15,16 Some work has been done on the dynamic property of spacer fabric and it indicates that spacer fabric can be used as a type of effective material for human body protection. 17 Meanwhile, little further progress has been made about the damping property of spacer fabric, and the damping property is an important indicator of dynamic comfort. Furthermore, apart from these works on other materials, for example, composite, foam and nanotube mats, 18 there have been few investigations on the dynamic mechanical property of spacer fabrics, such as high damping and stiffness, and relations between the structure of spacer fabric and damping indices. At present, the general measuring methods of the damping property are the free vibration method and half power points method.19,20 So, the free vibration method is adopted.
Therefore, following previous studies on the structure and properties of spacer fabrics, we deeply studied the damping property in this paper. A theoretical analysis of the damping property of spacer fabric was conducted based on the damped free vibration test, and the damping ratio, damping coefficient, logarithmic decrement and free vibration period were featured. In addition, the effect of different structural parameters of spacer fabric on the damping property was also investigated. The findings are anticipated to help people design spacer fabric with a better damping property.
Theoretical analysis
Description and assumption of vibration methods
In order to conduct the free vibration test of spacer fabric, the setup of the vibration test of a knitted spacer fabric is schematically shown in Figure 1. A support platform is fixed to a fixed platform, and spacer fabric is tightly pasted on the surface of the support platform; then, an isolator connected with an accelerator sensor is put on the spacer fabric. When an external initial excited vibration is acted on the spacer fabric and the isolator, they will form a uniform vibration assembly and do free vibration. Finally, the vibration assembly will be static because of the damping of spacer fabric.
(a) Schematic diagram of the free vibration of spacer fabric. (b) Schematic diagram of the single-degree-of-freedom system of free vibration of spacer fabric.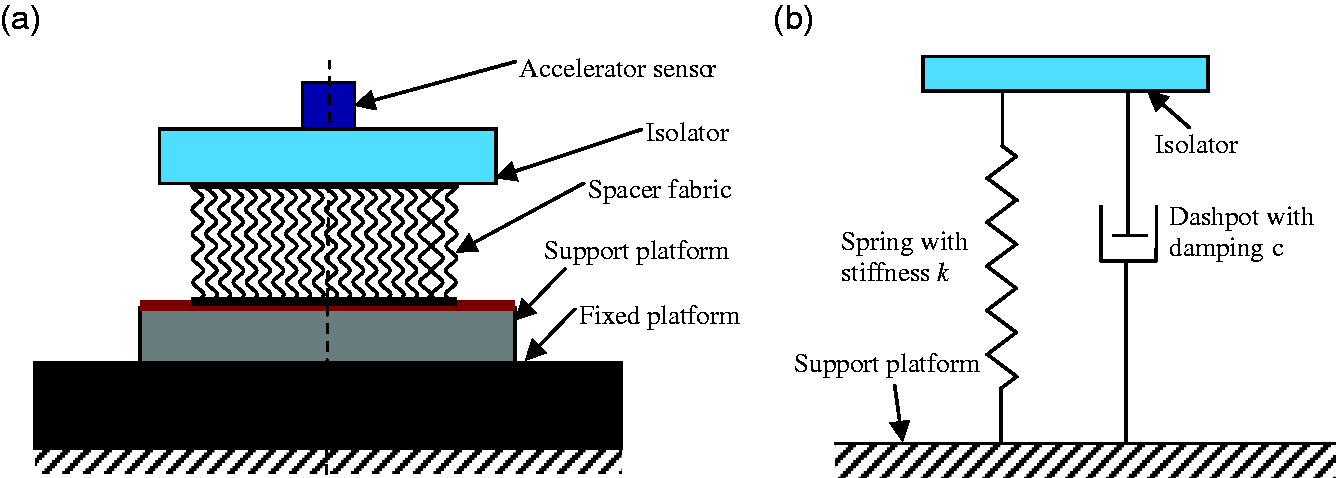
Based on the observation of the spacer fabric and the isolator in the preliminary test, the isolator keeps contacting with spacer fabric during the whole vibration test, and the following assumptions are made for the theoretical analysis of the spacer fabric under free vibration.
The mass of the isolator made up of iron is much larger than that of the spacer fabric (ranging from 100 to 300 g) made of polyester. Therefore, when considering the assembly consisting of spacer fabric and the isolator, the mass of the spacer fabric can be ignored in the vibration system for the assembly. Spacer fabric is a viscous–elastic body, and the elastic stiffness of spacer fabric is far lower than that of the isolator, and the damping effect of spacer fabric dominates greatly. Then, during the whole vibration process, elastic stiffness and damping of the assembly are assumed to be equal to that of spacer fabric.
Mathematical modeling
When the vibration system excites the assembly to have a free vibration, the assembly consisting of the isolator and spacer fabric vibrates freely and decays to be static. The damped free vibration can be regarded as a single-degree-of-freedom (SDOF) system, as shown in Figure 1(b). In this model, the spring with stiffness k and the dashpot with the viscous damping c are connected with a mass m of the isolator. The displacement x of the isolator can be integrated by the acceleration recorded by the accelerator sensor. The vibration differential equation of the assembly may be written as follows

In order to solve equation (1), some symbols are introduced in equation (2)

By substituting equation (1) into equation (2), it yields

This is a damped vibration equation for loss energy resulting from friction and plastic deformation of spacer fabric. So, the corresponding solution of equation (3) may be written as


Hence, equation (4) is simplified as

By considering boundary conditions, that is, when

By combining equation (7), equation (6) may be written as


Based on equation (8), it is obvious that the response of the vibration system is no longer simple harmonic motion but damped vibration under certain regularity when the damping ratio is smaller than 1. The damped vibration curve is shown in Figure 2.
Damped vibration curve of spacer fabric.
It is obvious that the assembly conducts damped free vibration, and the vibration amplitude of spacer fabric gradually decreases to be zero. Vibration period Td is expressed in equation (10)

Figure 2 shows that the damping system can still do reciprocating motion when the damping is small, while it can do simple harmonic motion with exponential decay. The attenuation coefficient of vibration amplitude η can be expressed as

From equation (11) and Figure 2, we know the attenuation degree of vibration amplitude is determined by the attenuation coefficient η. The greater the attenuation coefficient η is, the larger the attenuation degree of vibration amplitude is. The logarithmic decrement δ is often used to replace attenuation coefficient η. For convenience, two peaks are chosen to calculate the damping coefficient and damping ratio for more accurate results, when η is small. We select peak value Ai of the ith peak and peak value


If the damped vibration curve of the spacer fabric in Figure 2 is measured, the logarithmic decrement δ can be calculated by equation (11) and the damping ratio is calculated by equation (13). Then, viscous damping of vibration system c is acquired based on equation (2).
Experimental details
Sample preparation
The spacer fabrics we need in this paper were mainly applied to cushion products, so 13 warp-knitted spacer fabrics with a suitable compressive property were selected as samples. The filaments of these spacer fabrics were all made of polyester. As the structural parameters, such as thickness of spacer fabric, outer layer structure and structural parameters of the spacer filament (diameter, inclination angle, arrangement method), could affect the vibration damping of spacer fabric, 13 spacer fabrics were designed by changing the thickness, filament diameter, area density, inclination angle of the spacer filament and arrangement method of the spacer filament.
Basic structural parameters of spacer fabrics

C: the number of courses per 5 cm; W: the number of wales per 5 cm; M: the number of meshes per 25 cm2.
In addition, X and V are the arrangement methods of the spacer filaments and they are shown in Figure 3.
X-shape and V-shape.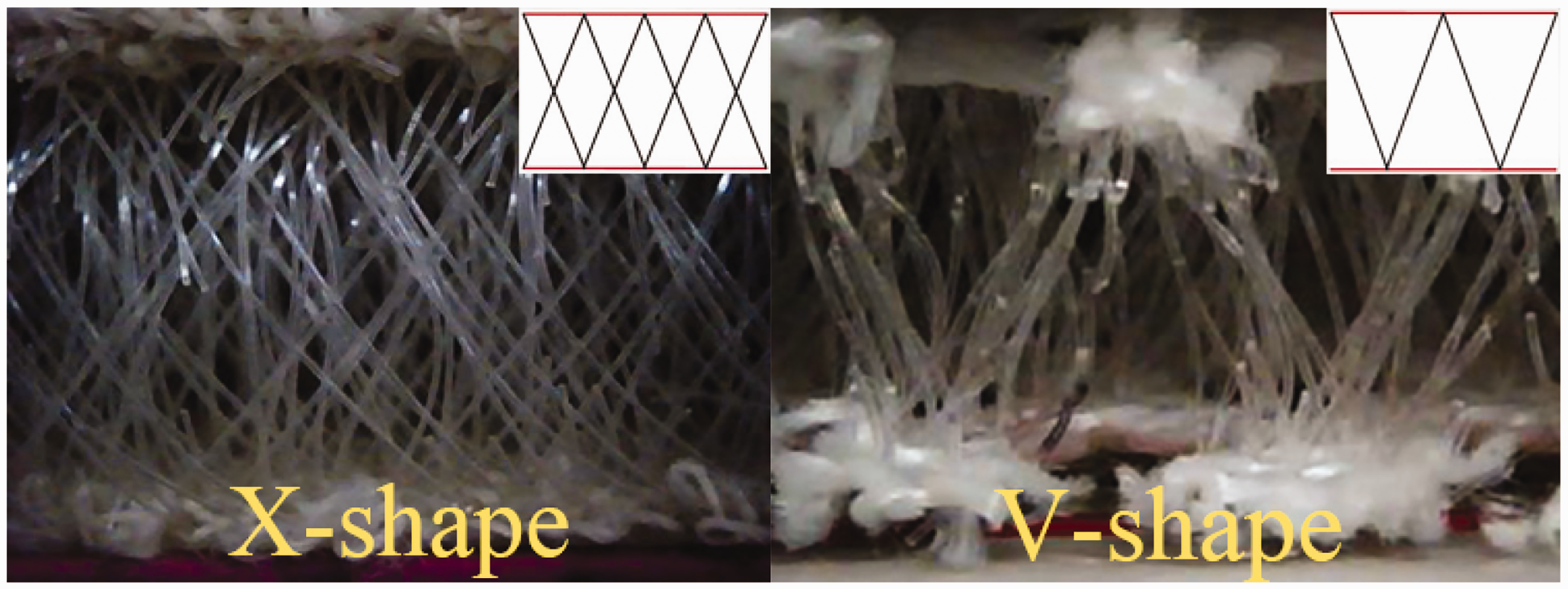
Free vibration test
The test system of the damping property of spacer fabrics is shown in Figure 1. An accelerated sensor was installed on the center of the isolator, and the accelerated sensor was connected with a data collector and PC computer. Then, we set the basic parameters of the dynamic acquiring software LMS to set the test time as 10 min. Accelerated velocity–time curves were obtained. After using MATLAB to analyze the data collected from the test, we could acquire a displacement–time curve by a second-order integral at the acceleration–time curve. Then, we extracted the eigenvalues and calculated the damping ratio, damping coefficient, logarithmic decrement and free vibration period.
In order to calculate the damping coefficient and the damping ratio, and analyze the influence of structural parameters on the damping property, spacer fabrics with different structural parameters were tested by the free vibration method. Thirteen spacer fabrics were cut into circles with diameters of 16 cm, and all samples were kept flat for accurate measurement. Spacer fabric was tightly pasted on the support platform. When the platform is excited slightly, the system would vibrate. Then, the accelerated velocity sensor collected vibration signal and data collector transferred the electrical signal to a digital signal, and the PC computer processed and analyzed the digital signal. When the test was completed, the data was checked and saved. Each sample was measured in triplicate.
Results and analysis
Typical displacement and time curve of the free vibration test
MATLAB software was used to analyze the data collected from the accelerator sensor, and a displacement–time curve could be calculated by a twice integration at the acceleration–time curve. A typical displacement–time curve of spacer fabrics is shown in Figure 4.
Typical displacement and time curve of spacer fabric.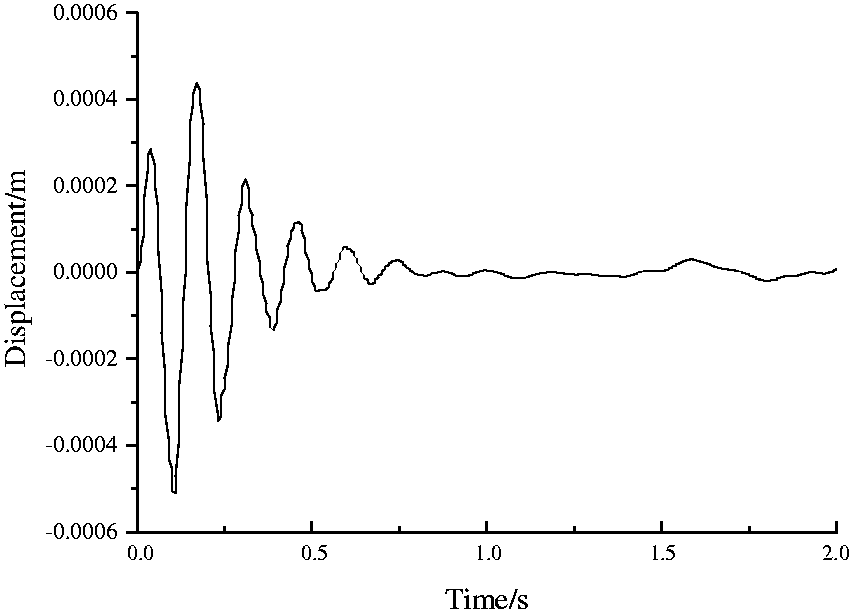
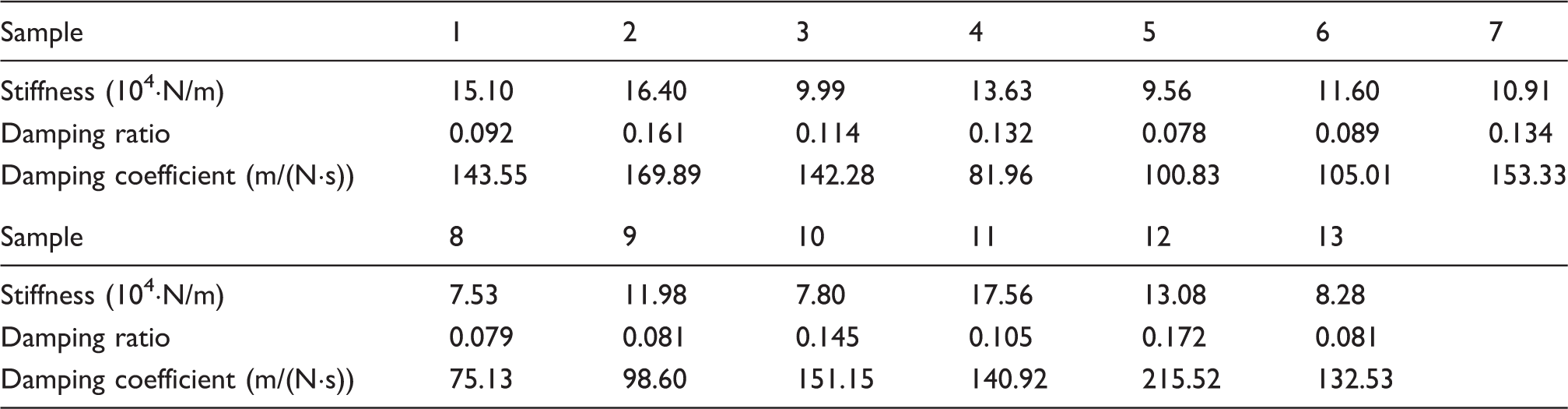
Damping ratio and damping coefficient of spacer fabric
The deviation between discrete points from the experimental results and theoretical curves is very small. That is, the goodness of fit between the experiment results and the theoretical results is very high. The theoretical damped vibration curves were obtained based on the initial peak value, damping ratio and natural frequency from the experimental displacement–time curve. Comparative analysis was given between the theoretical damped vibration curves and measured damped vibration curves.
For the stiffness of spacer fabrics under compression, samples were cut into a circle shape and the compression speed was set as 12 mm/min, and then experimental compression stiffness values were featured from compression force and distance curves.
Comparisons of damped vibration curves between theoretical and experimental results of the free vibration test
The experimental logarithmic decrements of free vibration were obtained from the displacement–time curves shown in Figure 4, wherein the theoretical curves of the damping ratio and logarithmic decrement of spacer fabric were also acquired. The comparative analysis of the experimental results and theoretical curve is illustrated in Figure 5. After substituting the experimental results, the theoretical displacement–time curves can be achieved. Figure 5 provides a typical comparison of the experimental curve and the theoretical curve of one spacer fabric.
Comparison of the experimental curve and the theoretical curve of sample 1.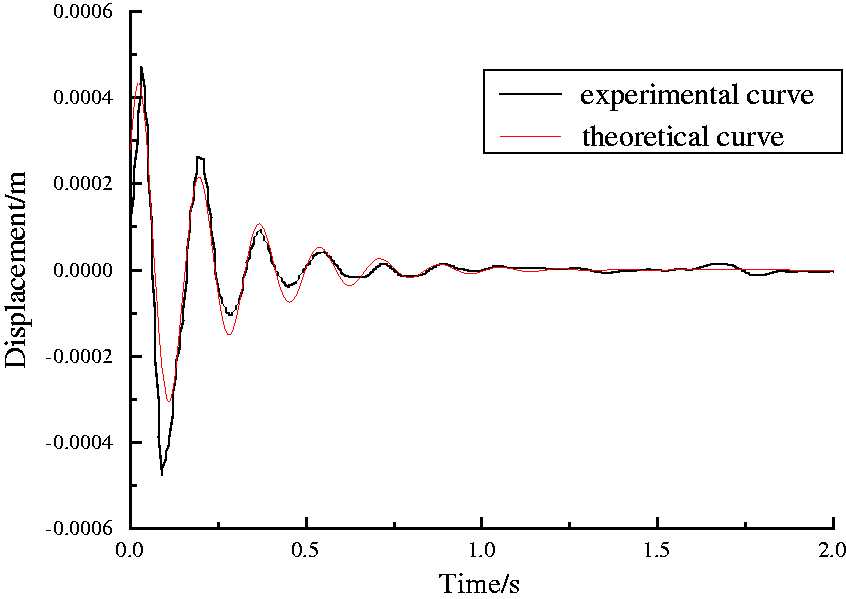
The comparisons of logarithmic decrements and free vibration periods from experiment and theory

In Table 3, Ac is relative error (
Influence of structural parameters of spacer fabric on the damping property
Based on the structure of spacer fabric, the damping property is related to the structural parameters of spacer fabric. In order to better design spacer fabrics with a good damping property, the effect of different parameters of spacer fabric, including thickness, filament diameter, area density and inclination angle and arrangement of spacer filaments, is adopted to analyze the relation of structure on the damping property.
Effect of the thickness of spacer fabric
A single factor analysis was used to study the effect of thickness. Hence, spacer fabrics with similar structural parameters but different thicknesses, that is, sample 1, sample 10 and sample 11 were chosen. Displacement–time curves of the three samples are shown in Figure 6. In addition, the damping ratios and damping coefficients are listed in Table 2.
The displacement–time curves of spacer fabrics with different thicknesses.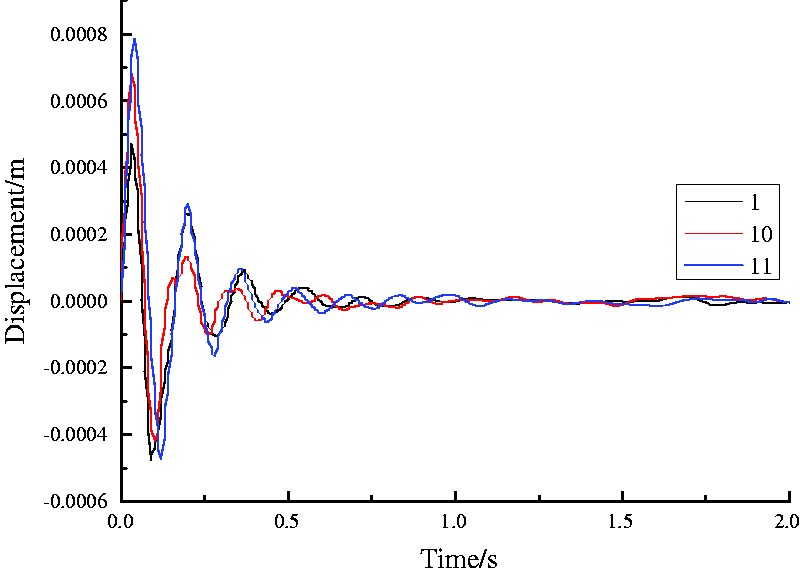
The damping ratio is a standard expression of comparing the damping property of different structural spacer fabrics. The value of the damping ratio reflects the energy absorption in the vibration process when compression deformation has happened. The larger the value of the damping ratio is, the more the energy absorption is. The thicknesses of sample 1, sample 10, and sample 11 are 5.96, 13.23 and 9.10 mm, respectively, and the damping ratios are 0.092, 0.145 and 0.105, respectively. The damping ratio of sample 10 is the largest, whereas that of sample 1 is the smallest. This is because the thickness of sample 10 is the largest; energy absorption is the largest when spacer filaments bend. Previous study has shown that pressure stress was in proportion to the reciprocal of the square of thickness, that is, when the thickness was larger, spacer filaments were easier to bend. Furthermore, spacer filaments will revolve and slip at the touchpoint. From this point of view, if the thickness is larger, the configuration is easier to change and the compression stiffness is smaller. Thus, it will take more energy for a larger deformation, which implies a larger damping ratio. Within a limited thickness, it can be presumed that the thicker space fabric possesses a higher damping ratio.
Effect of the diameter of filaments on the damping property
Obviously, the filaments are the main stressed parts and they have a great influence on the damping property. So, diameter may be an important factor on the damping property. Comparing sample 1 with sample 5, all structural parameters are basically the same except for the diameter. The situation is the same for sample 3 and sample 8, and sample 9 and sample 11. Hence, these three groups are selected to analyze the influence of diameter on the damping property. The displacement–time curves are illustrated in Figure 7. The damping ratios and damping coefficients of the samples are listed in Table 2.
The displacement–time curves of spacer fabrics with different diameters.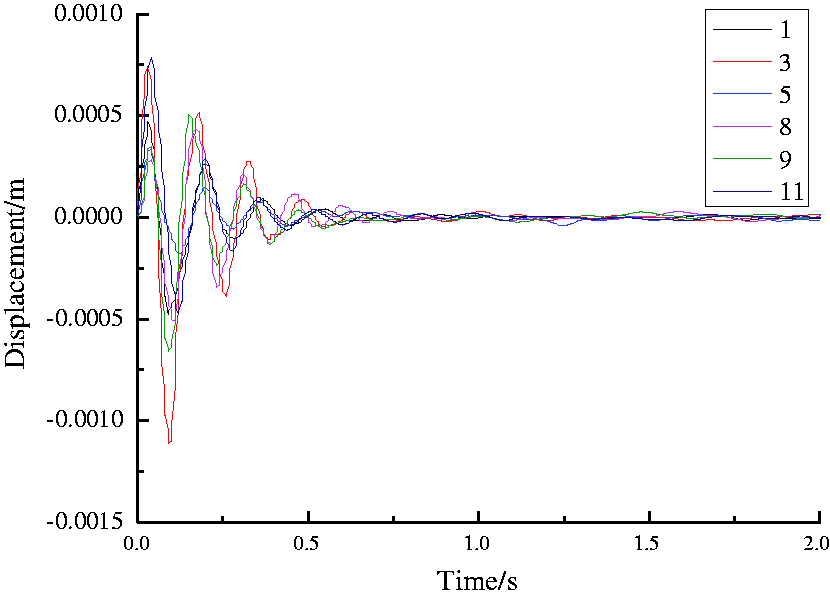
As shown in Tables 1 and 2, the diameters of samples 1 and 5, samples 3 and 8, and samples 9 and 11 are 192.7 and 132.6 µm, 228.1 and 178.0 µm, and 169.7 and 204.3 µm, respectively. Their damping ratios are 0.092 and 0.078, 0.114 and 0.079, and 0.081 and 0.105, respectively. It is obvious that the damping ratio increases with the increase of diameter when the structure is similar. This is because it takes more energy to bend if the diameter is larger when the number of the filaments is the same. Therefore, if the other structural parameters are basically the same, the damping ratio increases when the diameter of the filaments increases.
Effect of the area density of spacer filaments on the damping property
The structural parameters of samples 2 and 4 are basically the same except for the area density of the spacer filaments, so samples 2 and 4 are chosen to analyze the influence of the area density of filaments. The displacement–time curves are illustrated in Figure 8. The damping ratio and damping coefficient of samples 2 and 4 are given in Table 2.
The displacement–time curves of spacer fabrics with different area densities.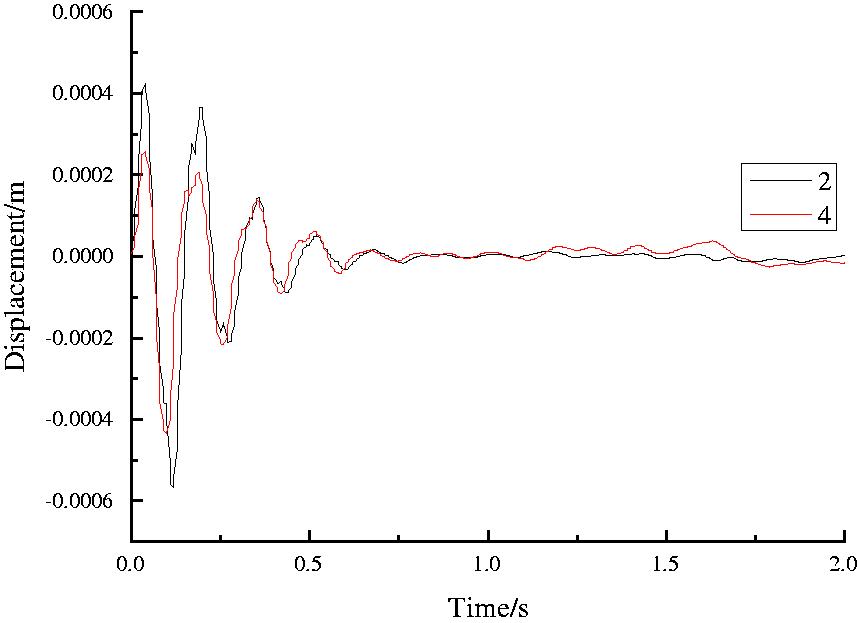
It can be seen from Tables 1 and 2 that the area densities of sample 2 and sample 4 are 616.3 and 439.5 g/m2, respectively; the damping ratios of sample 2 and sample 4 are 0.161 and 0.132, respectively. That is, the damping ratio of sample 2 is larger than that of sample 4. This suggests that the damping ratio increases with the increase of area density. The result may be due to the fact that the friction and extrusion force is enhanced with the increase of the number of spacer filaments. Viscous damping and dry friction damping increase as well. It can be concluded that the damping ratio of spacer fabric increases when the area density increases, if the other structural parameters are close.
Effect of the inclination angle of spacer filaments on the damping property
Comparing sample 4 with sample 6, all structural parameters are basically the same, except for the inclination angle of spacer filaments. The situation is the same for sample 7 and sample 12. Therefore, these two groups are selected to analyze the influence of the inclination angle of spacer filaments. The displacement–time curves are shown in Figure 9, and the damping ratios are listed in Table 2.
The displacement–time curves of spacer fabrics with different inclination angles.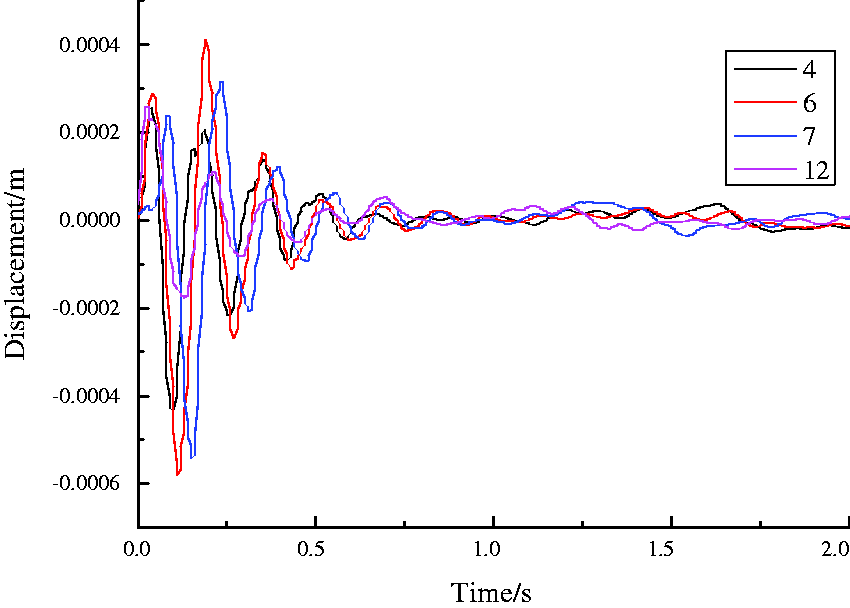
The inclination angle is the angle between the spacer filament and the plane of the outer layers. The deformation of the spacer filaments is mainly caused by the bending of filaments. The axial load is restricted by the inclination angle, and the viscous damping area from the inner air is restricted by inclination as well. Meanwhile, an appropriate inclination angle is beneficial to the structural stability of spacer fabric. As shown in Table 1, the inclination angles of sample 4 and sample 6 are 36.8° and 19.7°, respectively, and the damping ratios of sample 4 and sample 6 are 0.132 and 0.089, respectively. It is obvious that the damping ratio of sample 4 is larger than that of sample 6. The inclination angles of sample 7 and sample 12 are 18.9° and 31.5°, respectively, and the damping ratios of sample 7 and sample 12 are 0.134 and 0.172, respectively. The damping ratio of sample 12 is larger than that of sample 7. Therefore, the larger the inclination angle is, the larger the damping ratio. It can be concluded that the damping ratio of spacer fabric increases when the area inclination angle increases, if the other structural parameters stay the same.
Effect of the arrangement of spacer filaments on the damping property
Comparing sample 1 with sample 13, all structural parameters are basically the same, except for the arrangement of spacer filaments. Therefore, sample 1 and sample 13 are selected to analyze the influence of the arrangement of spacer filaments. The displacement–time curves are shown in Figure 10 and the damping ratios are listed in Table 2.
The displacement–time curves of spacer fabrics with different arrangements of spacer filaments.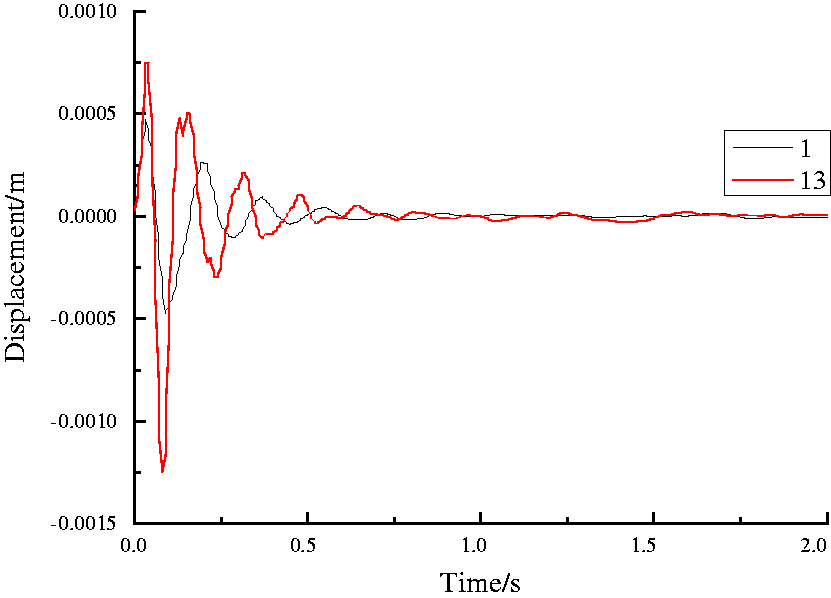
It can be seen from Tables 1 and 2 that the arrangement of spacer filaments of sample 1 and sample 13 is X-shaped and V-shaped, respectively, and the damping ratios of sample 1 and simple 13 are 0.092 and 0.081, respectively. The damping ratio of sample 1 is larger than that of sample 13, which manifests that the damping ratio of spacer fabric with X-shaped spacer filaments is higher than that of spacer fabric with V-shaped spacer filaments. In the case of the X-shaped arrangement of spacer filaments, the spacer filaments cross with adjacent filaments and this contributes to improving the compression elasticity of spacer fabric. In addition, dry friction damping from the slippage amongst spacer filaments is larger. Thus, the damping ratio is still higher when the arrangement of spacer filaments is X-shaped.
Therefore, the arrangement of filaments makes a big difference to the damping property. When the other structural parameters are basically the same, the damping ratio of spacer fabric with X-shaped spacer filaments is higher than that of spacer fabric with V-shaped spacer filaments.
Conclusions
The theoretical model of a SDOF system was made based on the viscous–elastic behavior of spacer fabric during damped free vibration testing. Displacement–time curves were acquired by a second-order integral of acceleration and time curves were recorded by the accelerator sensor, which was effective in featuring vibration indexes. Moreover, a comparative analysis between experimental and theoretical results of the damping ratio and displacement–time curves indicated that the vibration model was effective to characterize the damped free vibration of spacer fabric. In addition, the relationship between the structure and damping properties of spacer fabric was also investigated, which showed that parameters of spacer fabric, including thickness, filament diameter, area density and inclination angle and arrangement of spacer filaments, have a significant effect on the damping property. It can be concluded that warp-knitted spacer fabric has a great damping property and can be used as a kind of excellent damping material.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant numbers 11272086, 51203022), the Fundamental Research Funds for the Central Universities (2232014A3-02), the “DHU Distinguished Young Professor Program (B201307)” and the Fok Ying Tung (huoyingdong) Education Foundation (151071), and supported by the National Key Research and Development Program of China (Grant No.2016YFC0802802).