
Abstract
In recent years, wind power has become one of the most popular sources of renewable electricity generation. However, the wind is, by its nature, a highly intermittent source of energy. To capture the maximum power, wind turbines are generally equipped with a Maximum Power Point Tracking (MPPT) Controller. This paper proposes effective and robust MPPT control strategies based on Fuzzy Logic controller PI (FPI) and Fuzzy logic Fractional Order controller PI (FFOPI). Particle Swarm Optimization (PSO) is used to optimize the membership functions of FPI and FFOPI. The proposed MPPT strategies are validated on a Permanent Magnet Synchronous Generator (PMSG)-variable-speed wind energy conversion system. The overall model of the wind turbine-PMSG and control scheme is developed in MATLAB/Simulink and SimPower Systems toolbox. The results show that the MPPT based on FFOPI control optimized by PSO leads to the best transient response performance and robustness.
Introduction
Wind power is becoming an important alternative source of electricity supply and has gained a great popularity in recent years (Chavero-Navarrete et al., 2019). The main drivers are the escalation of electricity demand globally, the need to meet the decarbonization targets of the energy sector and the cost decline of wind turbine technology. However, wind energy depends on several factors such as the atmospheric conditions and geographic locations which may not always provide a strong enough or constant wind speed to generate electricity (Maroufi et al., 2020).
Consequently, with these intermittent characteristics, wind power cannot be fully extracted to meet electrical demands. In addition, wind turbines are not capable of producing as much electricity as conventional energy sources such as coal, gas or nuclear power plants (Parvin et al., 2019).
There are two types of wind turbines: fixed speed turbine and variable speed turbine (Salih et al., 2016). A variable-speed wind turbine allows the rotor speed of the turbine to follow the changes in wind speed. To maintain a maximum power output and maximize the efficiency of a variable speed wind turbine, a Maximum Power Point Tracking (MPPT) controller is used.
In recent years, Fuzzy Logic Controller (FLC) has been widely used for MPPT of WECS due to fact that it is able to take care of the nonlinearities and uncertainties (Parvin et al., 2019). optimization of fuzzy fractional controller using PSO algorithm improved the results for many kinds of systems, since it gives additional flexibility to the design. In this line of thought many applications of this type of controller were developed in the last few years Jesus and Barbosa, 2014).
Many researchers have devoted their studies to developing intelligent controllers, among these controllers we find the fuzzy FOPI optimized by the PSO, (PSO-fuzzyFOPI) (Elyaalaoui et al., 2021; Truong and Ngo, 2019). Our new contribution is to build a fuzzy program in the Matlab script, and introduce the values obtained from the PSO algorithm such as the error and error variation to obtain the results of
Compared to other evolutionary computation techniques such as Genetic Algorithms (GAs); the advantages are that PSO is easy to implement and there are few parameters to adjust. PSO has successfully applied in many areas such as function optimization, artificial neural network training, fuzzy system control, and other areas where GA can be applied. PSO has already been a new and fast developing research topic (Dorrah et al., 2012).
This article presents a new approach to robust and optimal MPPT controller design for a wind power system. Two controllers techniques for tuning the MPPT are proposed based on fuzzy PI (FPI) and fuzzy FOPI (FFOPI). The membership functions of these fuzzy controllers are tuned using an evolutionary algorithm based on Particle Swarm Optimization (PSO).
The remaining of the paper is organized as follows: Section 1 describes the modeling of the wind energy conversion system. Section 2 overviews the PSO algorithm and presents the fuzzy logic and fractional PI (FOPI); Section 3 describes the combination between the two tuning techniques (FLC and PSO), as well as the objective function for optimization, section 4 discusses the simulation result, and section 5, finally concludes the article.
Wind turbine model
Figure 1 shows the schematic of a small wind turbine system based on a permanent magnet synchronous generator (PMSG). Wind turbines convert wind energy into mechanical energy. This energy drives a generator, which produces electrical energy.
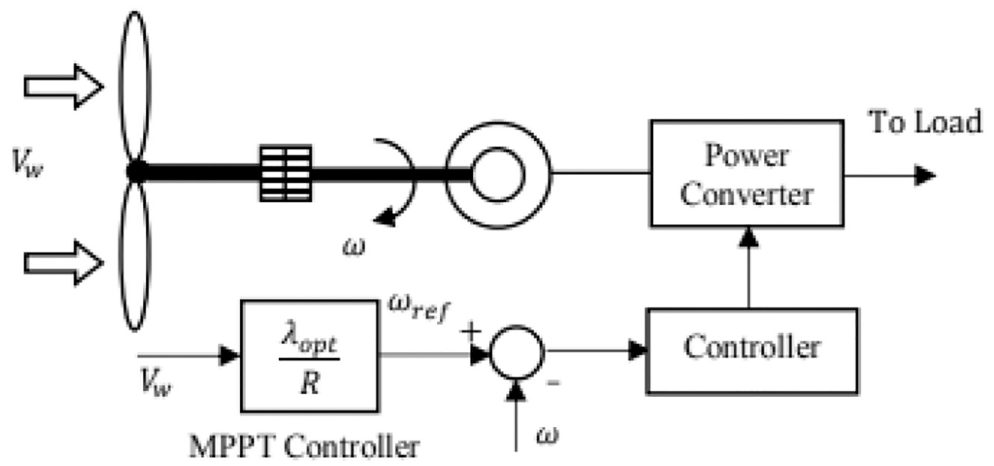
Wind power system with MPPT controller scheme.
The mechanical power produced by the wind turbine is expressed as follows (Sabzevari et al., 2017):

Where
The power captured by the wind turbine depends highly on

Where

The mechanical equation of the PMSG-based wind turbine is given by:

Where

The adjustment (or variation) of the torque is obtained by acting on the quadrature current
The speed regulation of the turbine with the maximization of extracted power is given in the following Figure 2:

Block diagram of the turbine with maximization of the extracted power.
Remarks
(i) For a given WT with fixed pitch angle,
(ii) In our project,
PI and FOPI controllers
PI controller
PI controller has wide applicability in the industry, because of its simplicity in implementation, most industrial controllers belong to the PID family Farahani and Rahmani (2019). Two parameters of the PI controller are defined as proportional (P) which is equal to the difference between the input signal and the feedback signal; integral (I) which is proportional to the integral error of the exciting signal. The transfer function of the PI regulator G(s) is expressed in equation (6).

FOPI controller
Fractional calculus is an extension of the


The generalized FOPI controller G(s), has a transfer function of the form (Jesus and Barbosa, 2014):

Where
Particle swarm optimization (PSO)
Particle swarm optimization (PSO) is a heuristic algorithm that finds the best solution by simulating the movement and clustering of birds. It can also be said to be a social psychology-based algorithm. According to Kennedy and Eberhart, the main idea of PSO is to assume that there is a flock of birds in a particular space.
The flock exchanges and communicates information through each other’s messages, follow the bird closest to the food, and change its search direction, gradually approach the only piece of food in the space. The theoretical basis of PSO is to find the optimal solution (
In a


where


Where

PSO process flowchart.
Fuzzy logic controller (FLC)
A fuzzy logic system (FLC) is a rule-base system that implements a nonlinear mapping between its inputs and outputs (Dorrah et al., 2012). Mamdani fuzzy system consists of four mains parts, namely Fuzzy, Fuzzy Inference, fuzzy rule base and defuzzification. A typical fuzzy system takes a state value and passes it through a fuzzification process and, then, it is processed by an inference engine. Finally, it goes through a defuzzification process (Safari et al., 2013). Figure 4 below shows the basic block diagram of an FLC (Parvin et al., 2019). There are two inputs in this Fuzzy algorithm and two outputs for PI controller which are
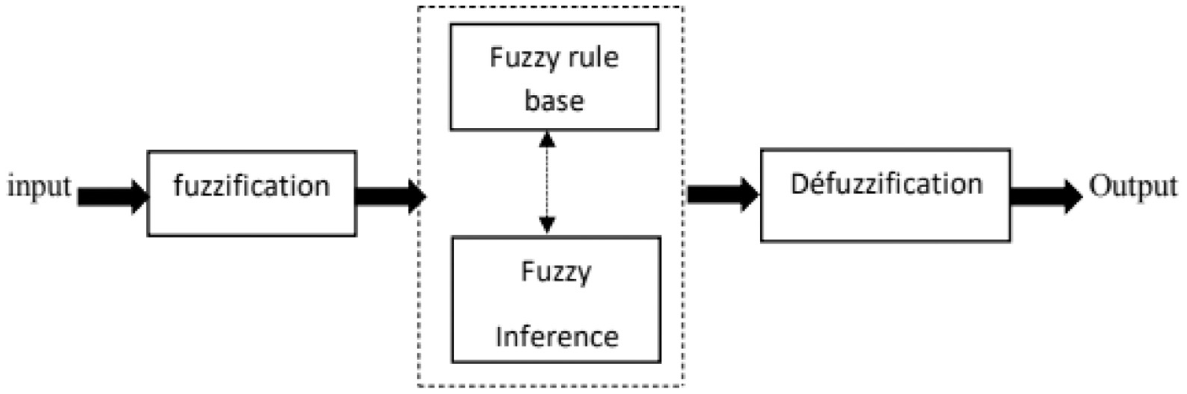
FLC basic block diagram.
Tuning through fuzzy controller
The structure of a tuned FPI and FFOPI controllers with two inputs (
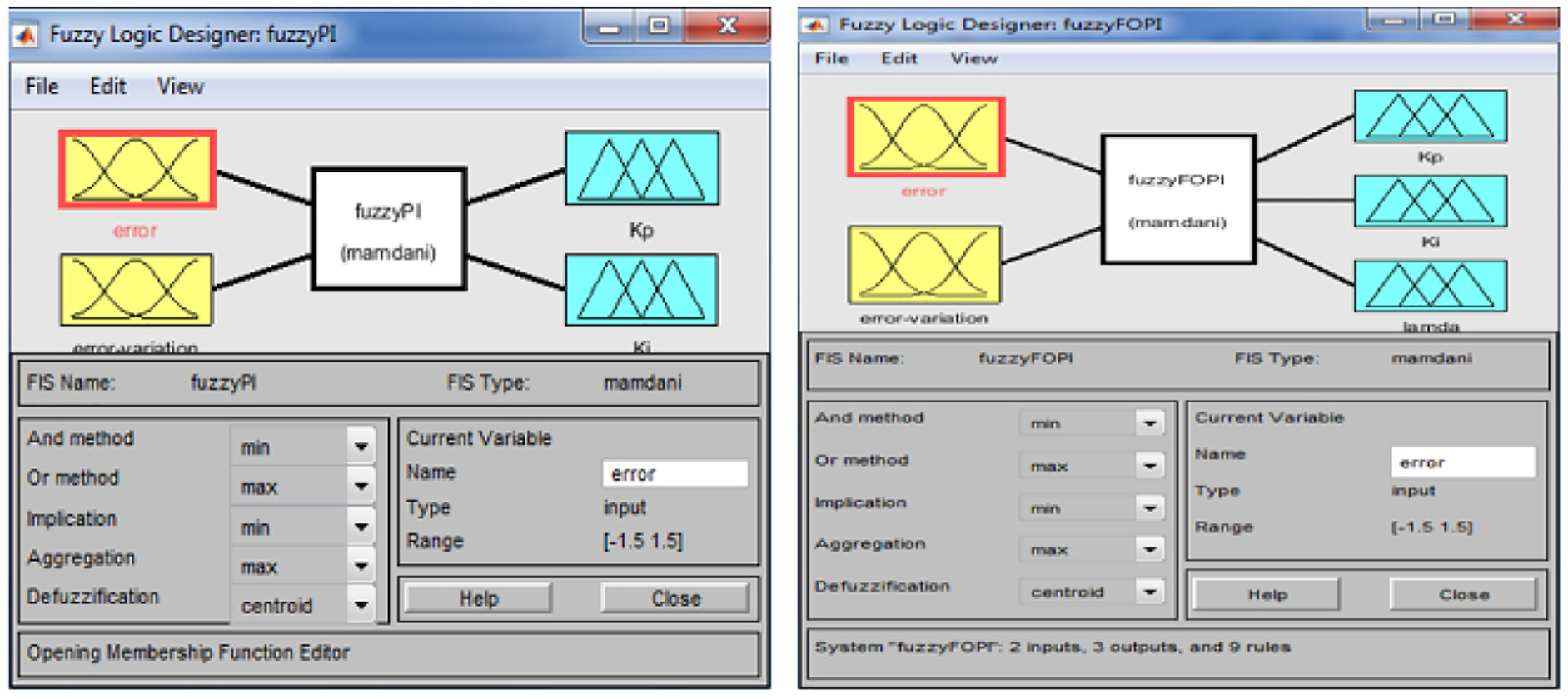
Mamdani fuzzy system for proposed FPI and FFOPI controllers.
Three membership functions for inputs: error (
Suspension fuzzy control tuning by PSO
This section presents the proposal for an active suspension fuzzy controller with PSO tuning, which is outlined in Figure 6. The purpose of the PSO is to adjust the scaling factors of a fuzzy controller which are A and B for inputs and
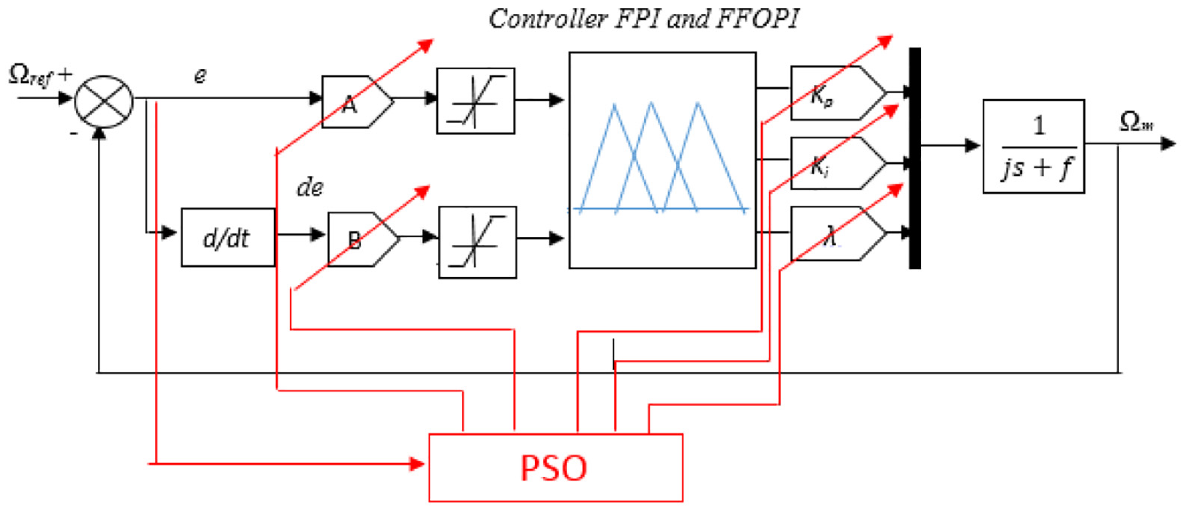
Block diagram for the PSO-Fuzzy control system.
Optimization problem
The goal of all optimization algorithms is to minimize system error performance. Therefore, the objective function must take into account the reduction in error. The characteristics of the response are implemented as an objective function. In this work, we use the integral absolute error (ITAE) criterion in goal to minimize the error signal in other words (Solihin et al., 2020); overshoots and setting time. The investigated objective function is given below:

where
Results of simulation and discussion
Results of simulation
We have noted that figures 7, 8, 9, 10, 11, 12, 13 represent the memberships functions for the inputs: error and error variation and the outputs: Kp, Ki, and λ; the wind profile represents the image of the turbine speed, it is illustrated in figure 14.
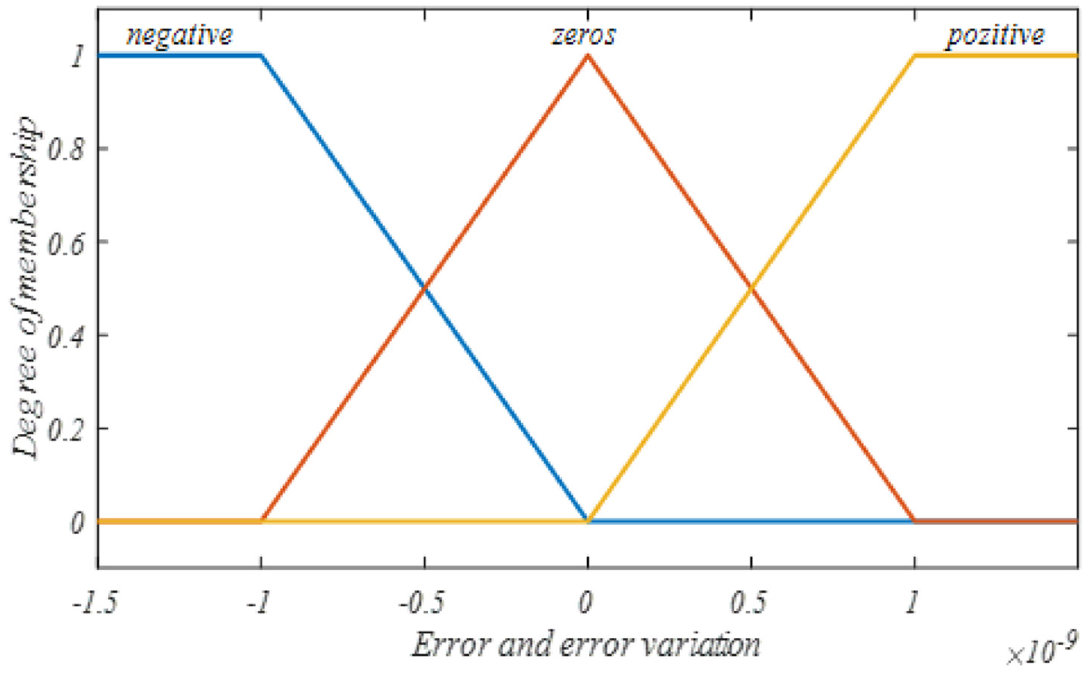
Memberships functions inputs.
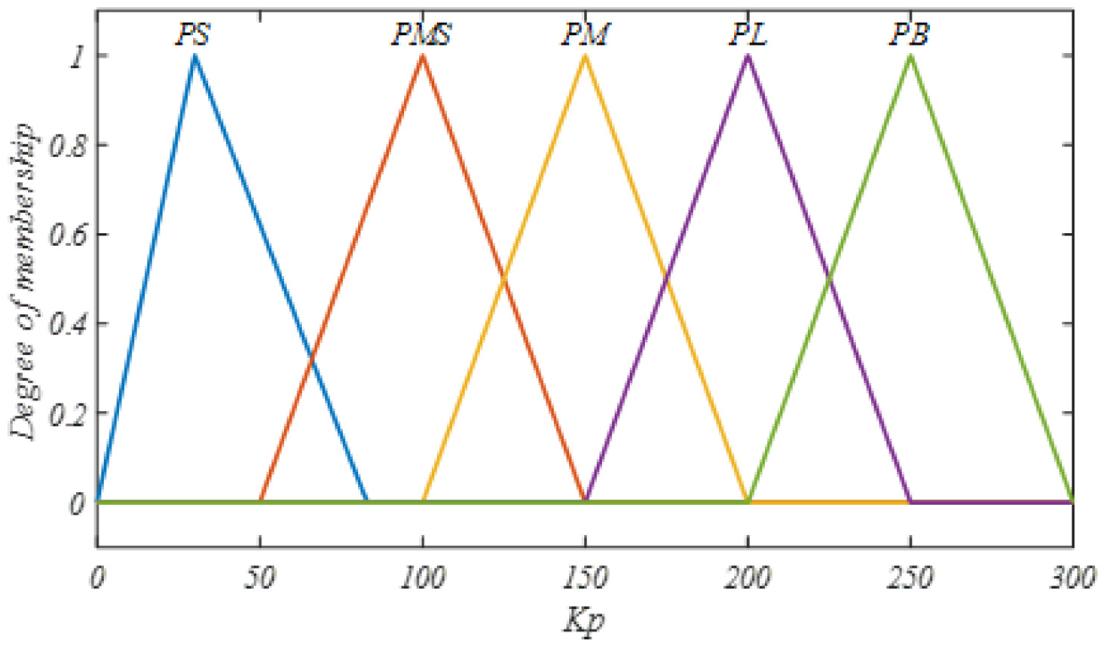
Memberships functions output 1.
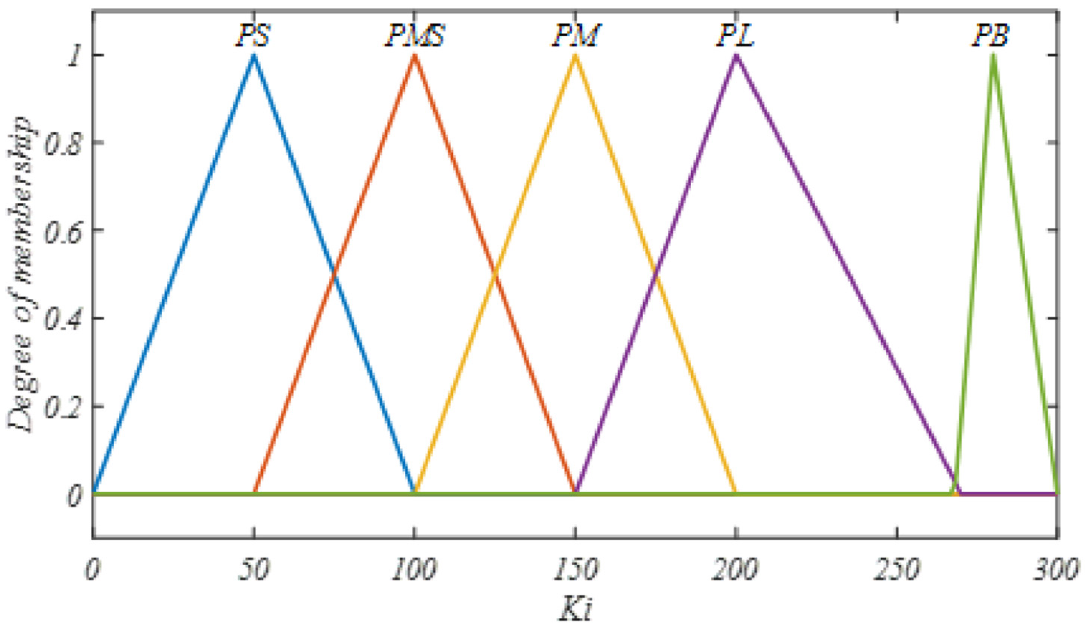
Memberships functions outputs 2.
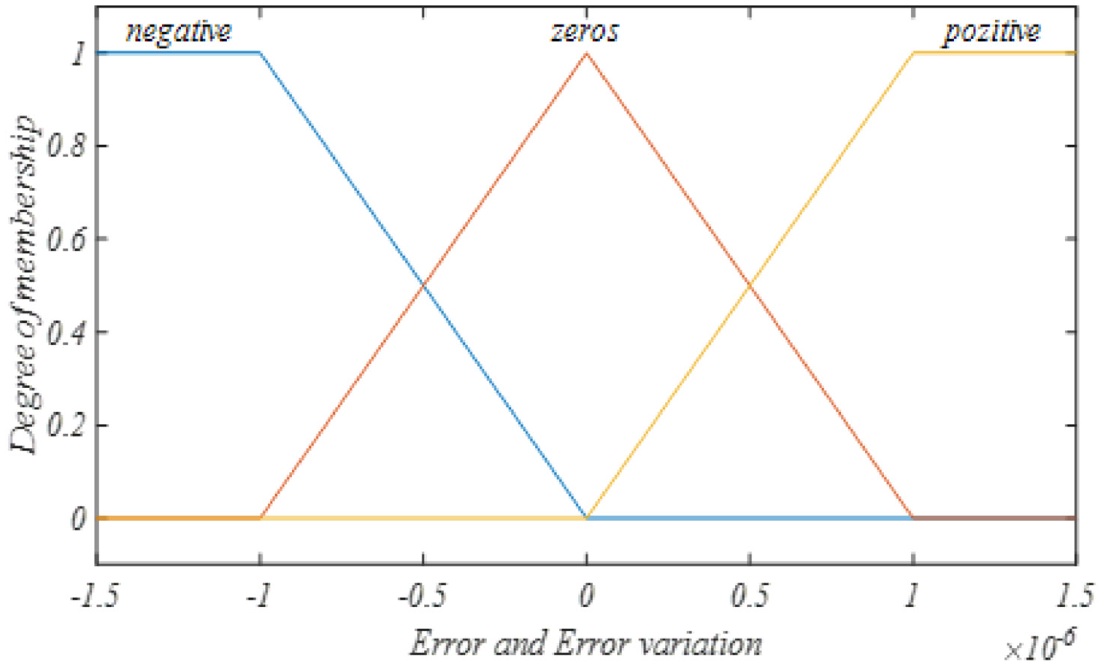
Memberships functions inputs.
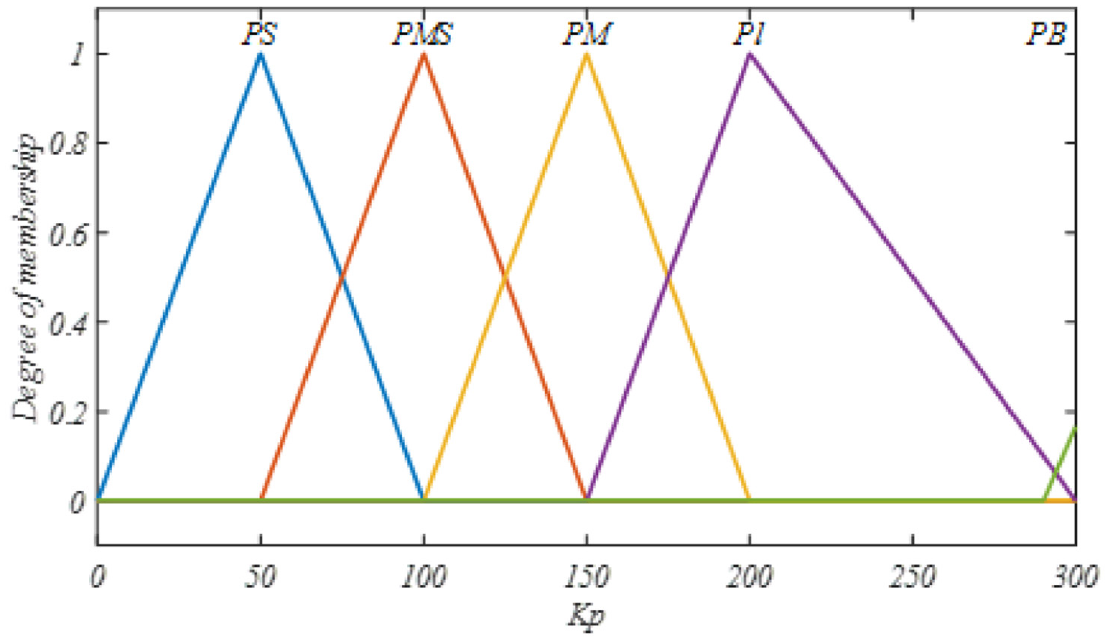
memberships functions outputs 1.
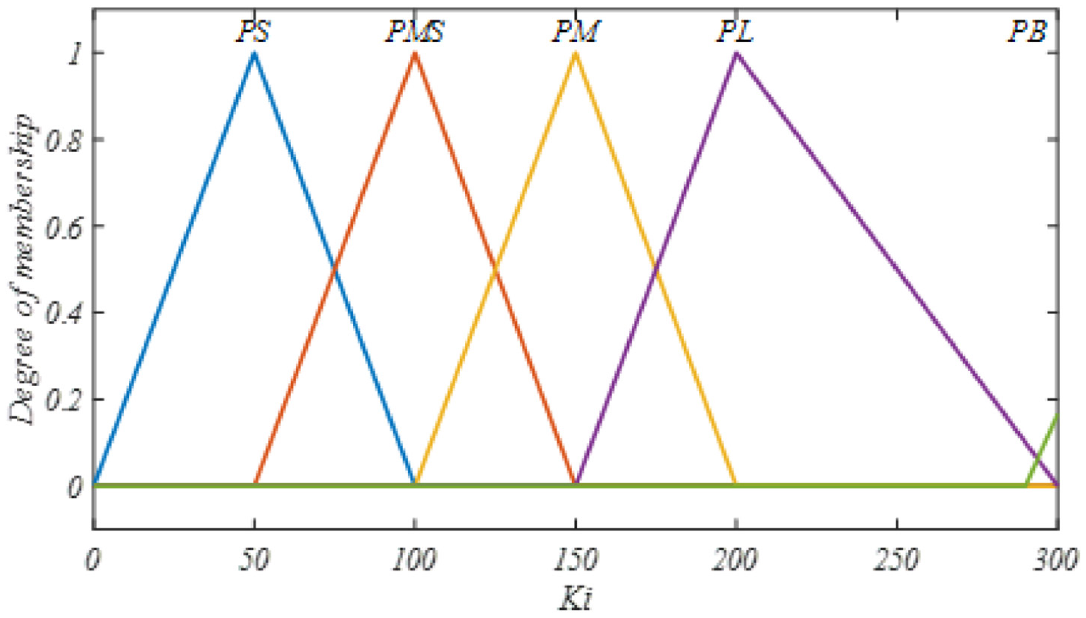
memberships functions outputs 2.
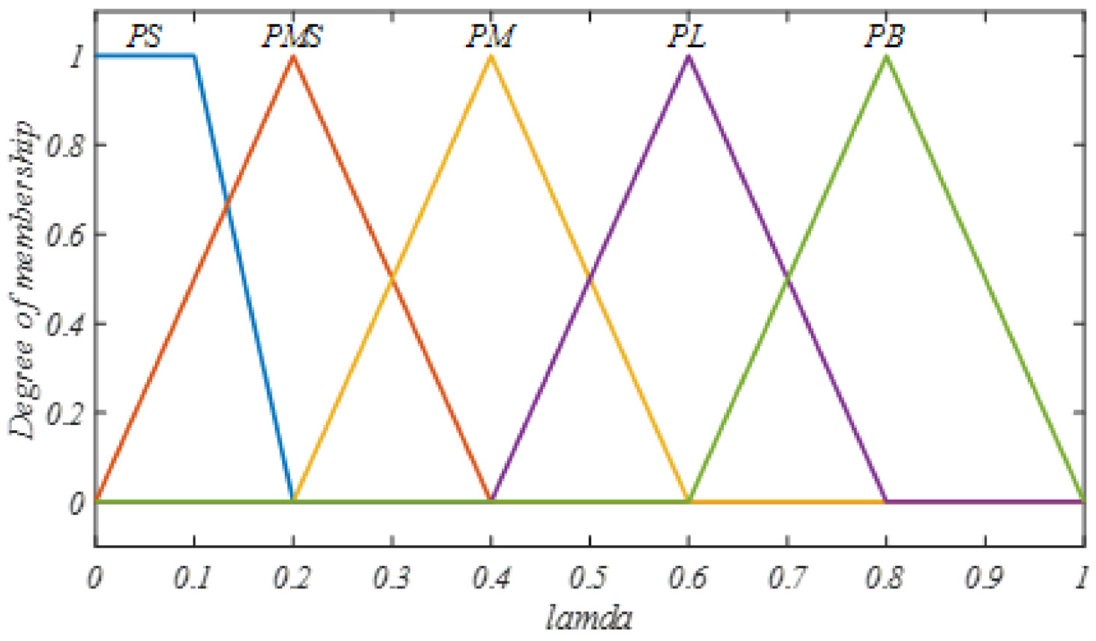
memberships functions outputs 3.
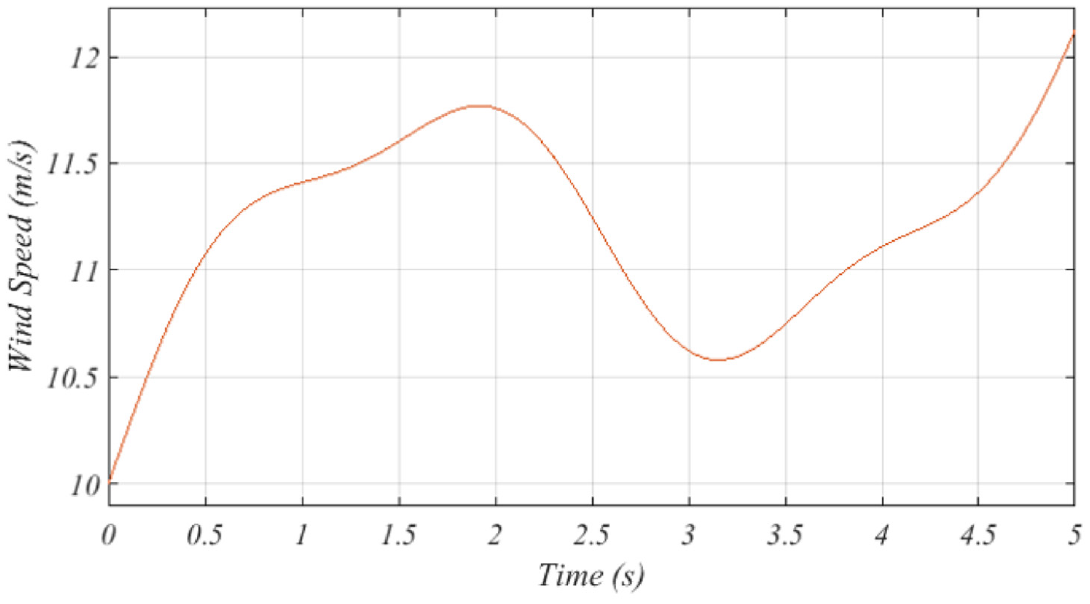
Wind speed profile.
Discussion
We can clearly see in Figure 15 that the FPI controller optimized by PSO gives good follow-up in terms of robustness, speed and precision compared to other controllers.
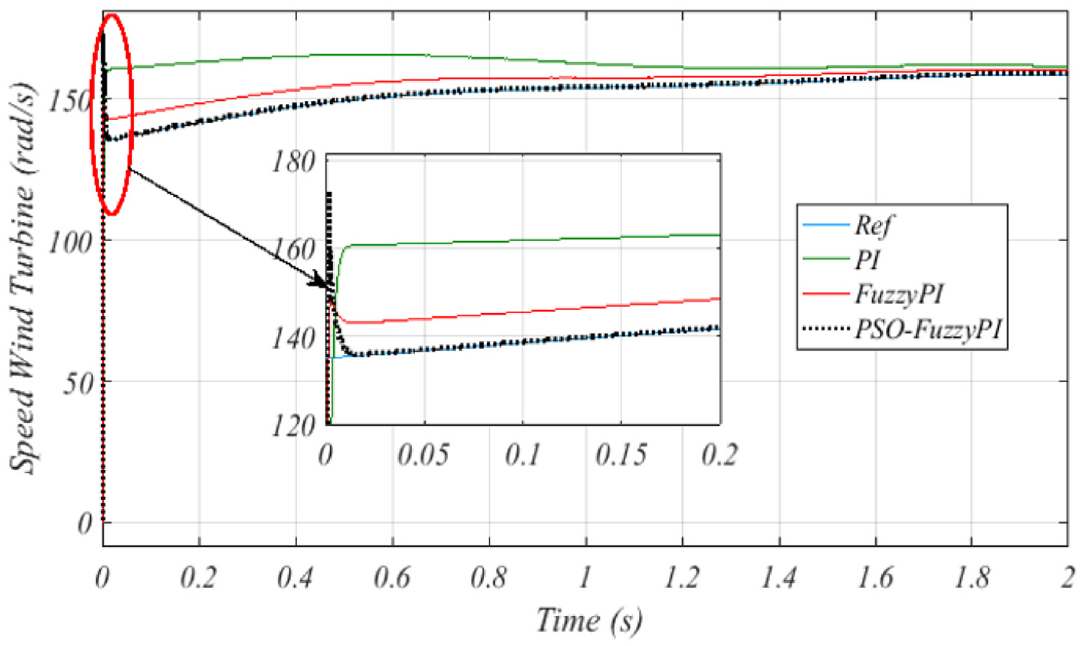
Performance of controllers: PI, FPI, and PSO-FPI.
It is also clearly seen in Figure 16 that the FFOPI controller optimized by PSO gives good performance compared to other controllers.
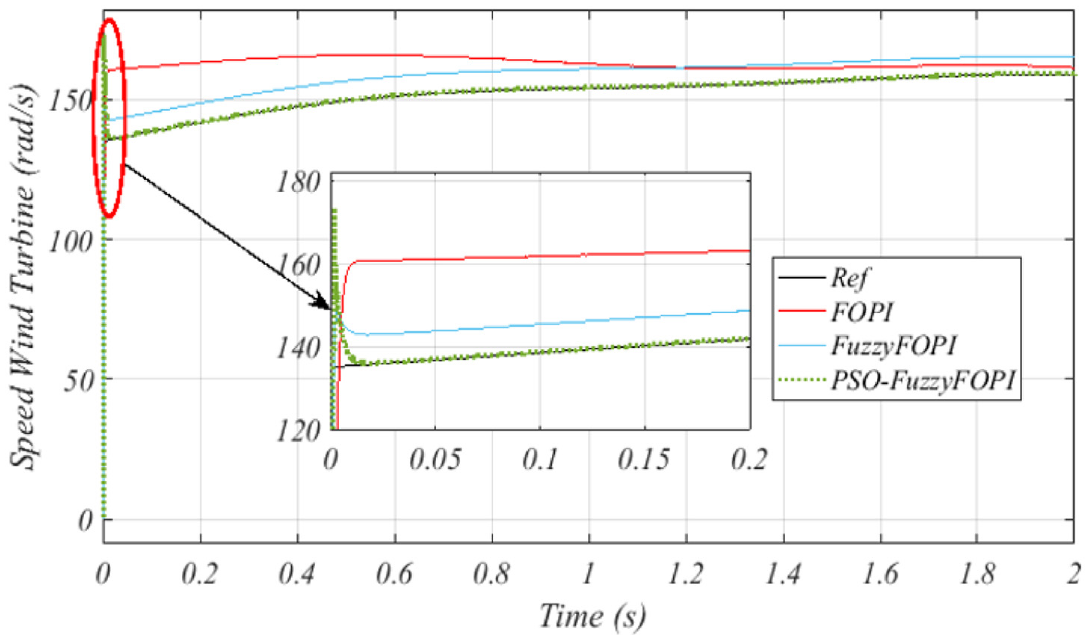
Performance of controllers: FOPI, FFOPI, and PSO-FFOPI.
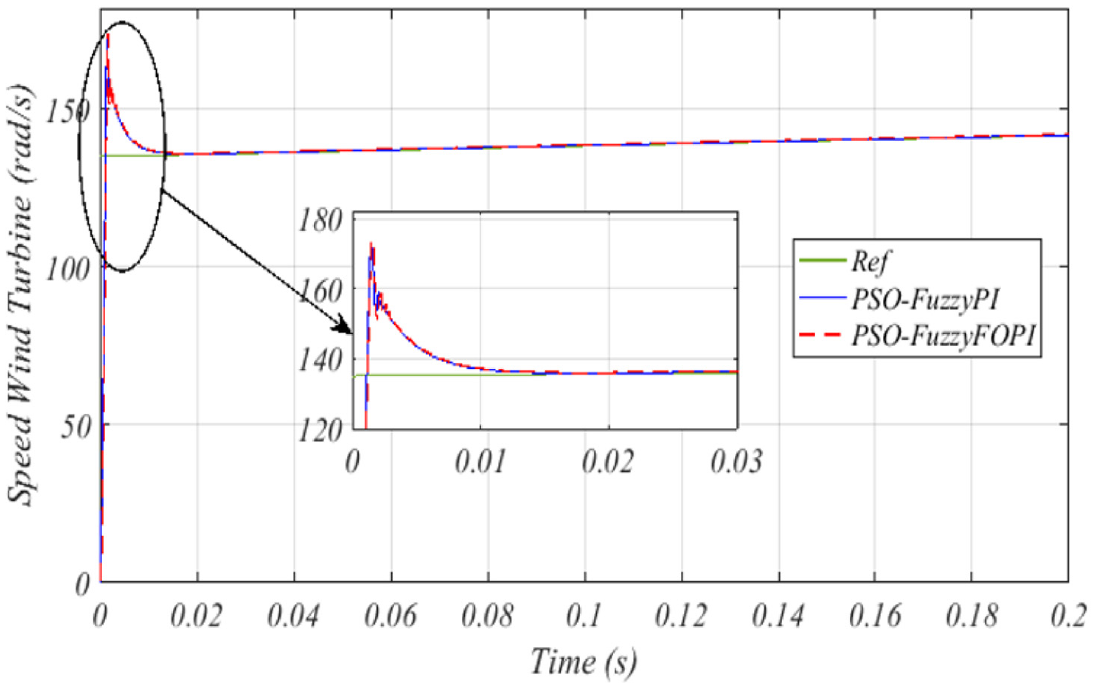
We can see in Figure 17, that the PSO-FFOPI controller gives a good flexibility compared to PSO-FPI, causing the impact of
The Performance comparison between two controllers: PSO-FPI and PSO-FFOPI.
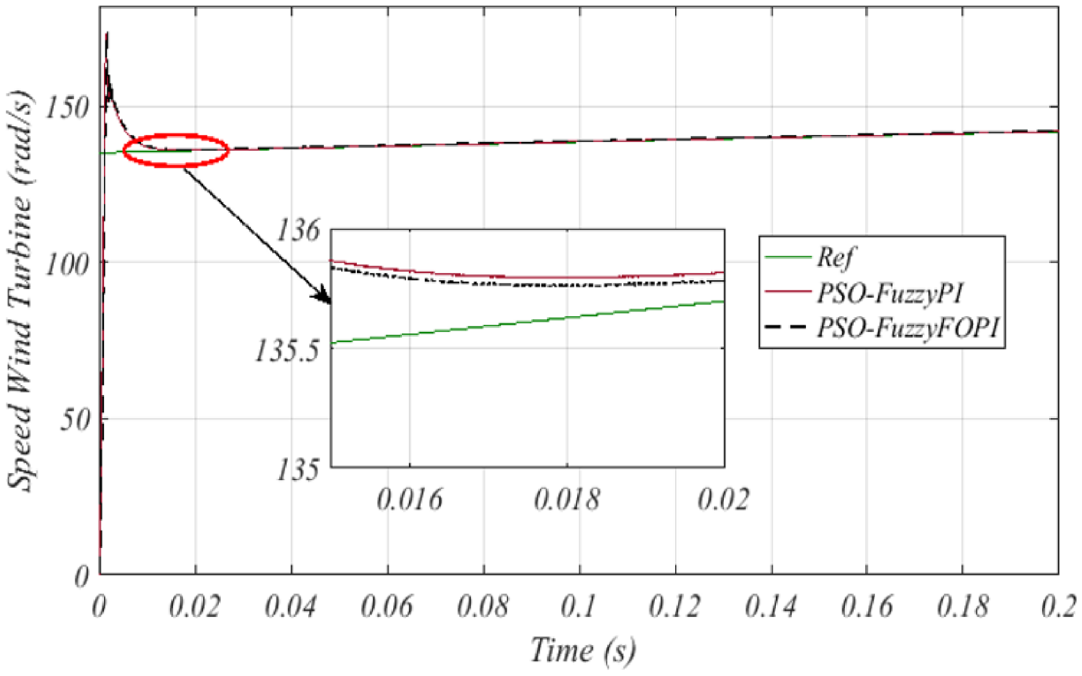
The final figure shows the robustness of two controllers PSO-FPI, and PSO-FFOPI by the parametric variation with
From Figure 18, the controllers PSO-FPI, and PSO-FFOPI present good robustness despite the parametric variation of the system.
The Performance of PSO-FPI, and PSO-FFOPI controllers with parametric variation.
Results of calculation
This part of the work gives the results obtained from the fuzzyPI and fuzzyFOPI programs using a PSO code.
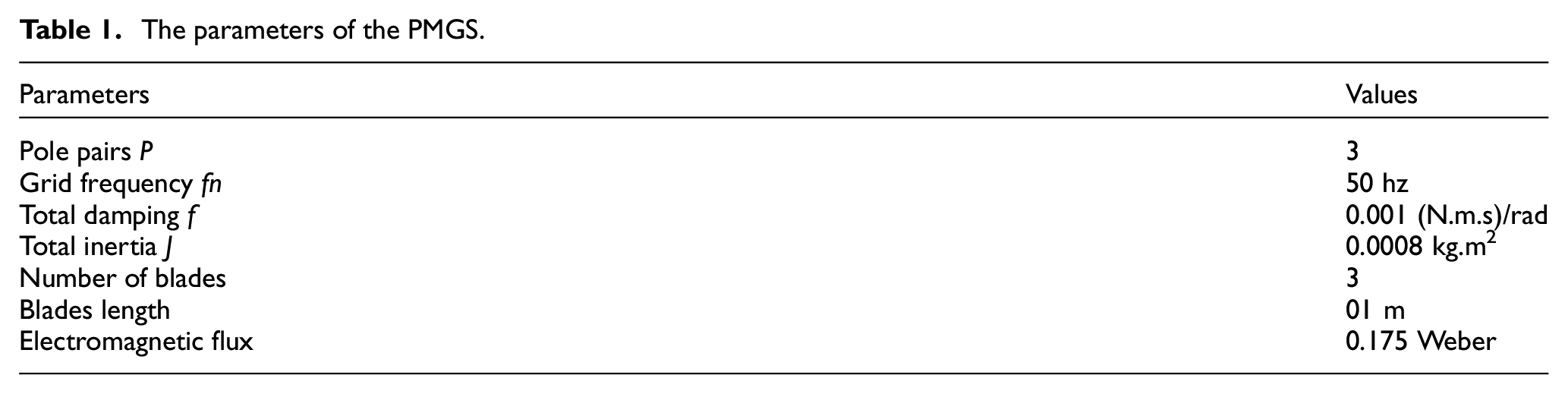
The parameters of the simulated PMGS-based WT system and PSO algorithm are given in the Tables 1 and 2 (Asgharnia et al., 2018; Dorrah et al., 2012; Iqbal et al., 2020).
The parameters of the PMGS.
The parameters of PSO algorithm.

In this work, we have optimized the interval of the universe of discourse for two inputs
(i) for FPI:
(ii) for FFOPI:
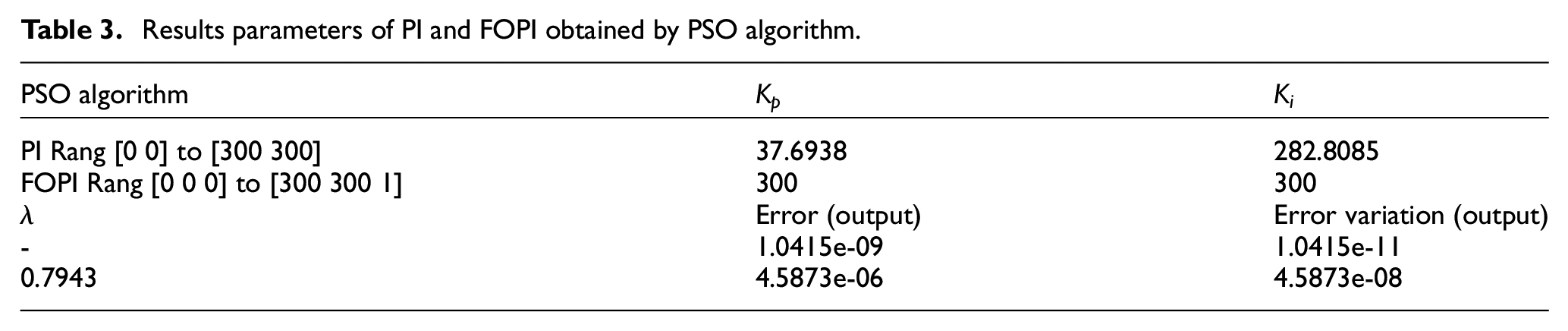
The results obtained by the PSO and on the interval [0 0] a [300 300] for FPI controller, and [0 0 0] a [300 300 1] for FFOPI controller are showing in the following Table 3:
Results parameters of PI and FOPI obtained by PSO algorithm.
In this step, we introduce the value of the error and variation of error calculated from the PSO. The values of the outputs
Results parameters of FPI and FFOPI optimized by PSO algorithm.
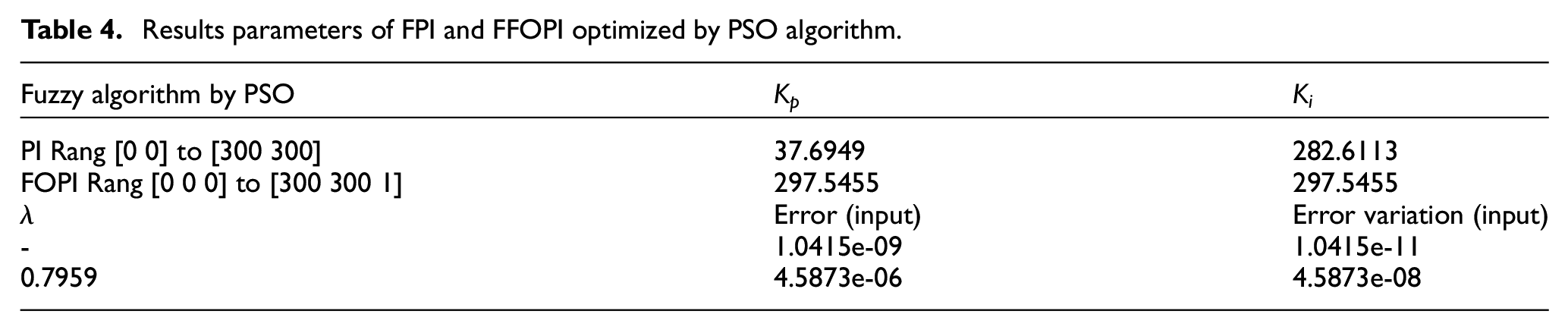
We have seen from the results in two Tables 3 and 4 that the parameters of
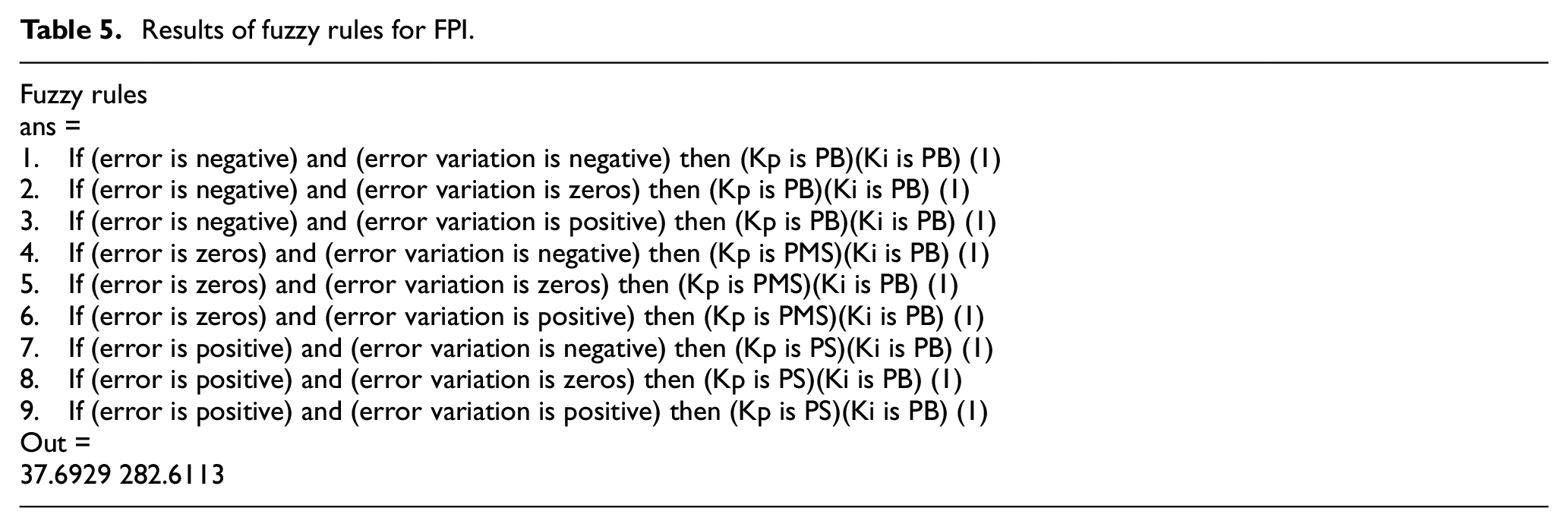
Results of fuzzy rules for FPI.
Results of fuzzy rules for fuzzy FOPI.

Conclusion
We assumed a mixed approach of PSO and FLC to achieve the optimal parameters of PI and FOPI controllers in MPPT for a wind turbine. PSO is used to optimize ranges of membership functions and fuzzy rules. The developed algorithm provided a high quality solution in an efficient manner and offered full control to extract the maximum power provided by the wind. the designed FLC gives better control performance than the status feedback controller. However, the FLC is not robust, but when we use the PSO algorithm to tune the FLC, the FPI and FFOPI controllers become very robust. but according to the studies which already made and the study in this work, the new commands PSO-FFOPI and PSO-FPI are very effective compared to the controllers PI, FOPI, FPI, and FFOPI.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.