
Abstract
This paper proposes a novel method using a machine learning-based Adaptive Neuro-Fuzzy Inference System (ANFIS) to optimize Maximum Power Point Tracking (MPPT) in variable-speed Wind Turbines (WT). The ANFIS algorithm, blending artificial neural networks and fuzzy logic, addresses issues with traditional wind speed sensors, such as cost, imprecision, and susceptibility to adverse weather conditions. An initial offline-trained ANFIS is suggested to understand turbine power characteristics, and subsequently estimate varying wind speed, addressing strong nonlinearity due to WT aerodynamics and wind speed fluctuations. A second ANFIS efficiently tracks the maximum power point, overcoming limitations of linear controllers. Implemented in Matlab/Simulink for a 3.5 kW WT, the approach demonstrates effectiveness, precision, and faster response time in wind speed estimation and accurate MPPT compared to alternatives. A notable advantage is its independence from instantaneous wind speed measurement, providing a cost-effective solution for wind energy systems.
Keywords
Introduction
Recently, the field of wind power generation has experienced remarkable growth owing to its cost-effectiveness and environmentally friendly characteristics. This escalating trend is driven by the worldwide acknowledgment of wind energy as a pivotal solution to address future energy demands (Anbalagan and Joo, 2024; Chatri et al., 2023). Consequently, researchers have turned to advanced control techniques to enhance the performance of wind power systems. However, the inherent dependence of wind power on weather patterns makes it difficult to accurately gage its output due to its intermittent nature (Merabet et al., 2016). Central to this challenge is the crucial role of Wind Speed (WS) in determining the power output of Wind Turbines (WTs). Therefore, attaining precise WS estimation holds the key to optimizing operations and augmenting the overall efficiency of WTs (Krim et al., 2018).
Among various Wind Energy Conversion Systems (WECSs), the variable-speed power generation system (Prince et al., 2021) stands out due to its exceptional capability of extracting high power and maintaining superior power quality (Bekiroglu and Yazar, 2022; Hermassi et al., 2022b). A wind power system is highly complex due to its unpredictable and abrupt WS changes. Therefore, employing a Maximum Power Point Tracking (MPPT) controller is crucial to optimize the aerodynamic output power. This optimization aims to maximize power generation independently of the WS.
The aerodynamic power generated by a WT is directly linked to the rotor surface area, the power coefficient (CP), and the wind velocity (Krim et al., 2016). The power coefficient varies nonlinearly based on the Tip Speed Ratio (TSR) and the angle of the blade pitch (β). The TSR(λ) is determined by the rotor’s rotational speed and the WS (Krim et al., 2016; Youssef et al., 2018). At the point of optimal λopt, the power coefficient reaches its highest value (CPmax). The rotor speed of the WT at this optimum point, referred to as λopt and CPmax, is termed the optimal rotor speed. The WT attains its maximum power output at this optimal rotor speed.
The primary approach to achieve optimal wind energy extraction from the variable-speed WT is through the MPPT control method. This method can be broadly categorized into two groups: Direct Power Control (DPC) and Indirect Power Control (IPC). DPC is designed to immediately maximize the electrical power output. While this method performs well by analyzing the predetermined power curve of the system, its robustness cannot be guaranteed (Zhong et al., 2013). This DPC such as Incremental Conductance (INC), Optimum Relation-Based MPPT (ORB), and the Hill-climbing Search (HCS) (Bendib et al., 2015; Femia et al., 2007; Hohm and Ropp, 2003; Hosseini et al., 2013; Hua and Cheng, 2010; Lalouni et al., 2015; Yu and Liao, 2015). On the other hand, IPC aims to optimize mechanical wind energy extraction. Indeed, this is accomplished through methods such as Power Signal Feedback (PSF), TSR control, and Optimal Torque Control (OTC), as discussed in Cheng and Zhu (2014), Johnson et al. (2006), Pagnini et al. (2015). Additionally, fuzzy logic system, sliding mode control, and Neural Network (NN)-based control has been developed (Chen et al., 2024; Marugán et al., 2018; Moutchou et al., 2023).
For PSF control presented in Pagnini et al. (2015), it relies on the measured power curve of the WT. However, its applicability in complex environments with high wind turbulence is limited. The TSR control, as described in Johnson et al. (2006), regulates the rotor speed to maintain an optimal value but it requires accurate WS data. In Cheng and Zhu (2014), the authors introduced OTC that sought to maximize power capture despite uncertainties in aerodynamics and turbulent effects. However, a downside of the OTC approach is its relatively slow response to fluctuations in wind conditions, leading to a decrease in energy capture.
In addition, the INC methods operate independently of sensor requirements and the specific parameters of WTs and generators. Consequently, utilizing this method in systems leads to reduced overall costs and improved reliability (Bendib et al., 2015). As outlined by the authors in Hosseini et al. (2013)Yu and Liao (2015), the determination of the MPPT operating point can be based on the power-speed slope. However, a limitation of this approach is its susceptibility to instability when the turbine’s inertia fluctuates in scenarios of variable WSs (Hohm and Ropp, 2003). To mitigate this instability at various WSs, a novel technique named fractional order INC (FO-INC) is introduced in Yu and Liao (2015). This method is designed to address the instability concern by incorporating a variable step size for efficient tracking of the Maximum Power Point (MPP) under varying wind conditions, particularly during rapid changes in WS.
HCS, also recognized as Perturbation and Observation (P&O) method, is a resilient but unpredictable technique built on prior knowledge of WT characteristics (Lalouni et al., 2015). This algorithm aims to identify the local maximal point for a given function (Lalouni et al., 2015). A limitation of this method is the potential for determining the wrong direction when striving for the most significant power point during sudden changes in wind direction. To address these challenges, the authors in Femia et al. (2007), Hua and Cheng (2010) developed and implemented an improved version of the HCS technique, effectively mitigating the issue of inaccurate directional adjustments in response to changing WSs. Conventional MPPT methods face significant limitations due to their non-adaptive nature, particularly when dealing with the nonlinearity of wind speed and uncertainties in turbulent conditions.
Lately, artificial intelligence-based learning control methods, including fuzzy logic, neural networks, and neuro-fuzzy systems, have emerged as active solutions for addressing the challenges posed by nonlinear and uncertain systems. In Moutchou et al. (2023), the authors introduced an MPPT-based controller utilizing FLC for variable speed WECS with a direct drive PMSG. The proposed method utilizes DC voltage and power to optimize efficiency and robustness in MPPT control. The MPPT-based FLC is demonstrated to be highly effective, accuracy, and capable of enhancing power output while mitigating external perturbations. Despite the numerous benefits offered by the fuzzy model in comparison to alternative techniques, a noteworthy limitation is its inability to comprehensively address every conceivable issue. A critical consideration is the need for a meticulous examination of the parameters used for assigning linguistic variables during its application. In Chen et al. (2024), the authors introduces an adaptive integral sliding mode MPPT control approach for WTs with fixed-time convergence. By constructing a novel fixed-time integral sliding mode manifold, the controller design avoids singularity issues without using piecewise continuous functions. The adaptive fixed-time MPPT controller enhances tracking performance and robustness against external disturbances and uncertainties, showcasing promising results in improving WT control efficiency. Nevertheless, this approach have limitations related to the requirement for accurate measurement of system state values for effective fixed-time controller design. This reliance on precise state measurements could potentially limit the application of the proposed strategy in scenarios where accurate sensor data is challenging to obtain. The Artificial NN (ANN) represents an alternative approach for determining the maximum power peak, involving the processing of various input variables to achieve optimal power output (Marugán et al., 2018). Each NN comprises an input layer, a hidden layer, and an output layer, with no strict constraints on the number of nodes, allowing flexibility according to requirements. The ANN-based controller emerges as a more efficient and reliable option compared to conventional controllers for harnessing the maximum available power from the kinetic energy of the wind. However, NN exhibit certain limitations, including their black box structure, heightened computing load, vulnerability to overfitting, and the reliance on an empirical approach in the development of models (Thongam et al., 2009). Furthermore, the use of a lookup table containing pre-defined data is imperative for the implementation of this technique (Thongam et al., 2009).
Hence, to maximize power extraction from a WT within its operational WS range, optimal adjustment of the turbine shaft’s rotational speed is necessary (Krim et al., 2017). This adjustment relies on real time WS information (Usta and Kantar, 2012; Yılmaz and Çelik, 2008). Typically, WS anemometers are used for WS measurement. However, the significant cost associated with precise anemometers limits their extensive utilization. For instance, anemometers positioned around WTs within wind farms often fail to provide accurate WS data for each turbine (Lee et al., 2012). Anemometers situated atop nacelles can also lead to inaccuracy in WS measurement (Sozzi et al., 2001). In wind farms, multiple anemometers are commonly placed strategically to measure average WS (Pandey, 2002). This approach introduces challenges related to calibration, measurement precision and increased initial costs for wind generation systems (Diniz et al., 2004). Consequently, there is a growing interest in replacing mechanical anemometers with digital wind-speed estimators that leverage turbine characteristics (Abo-Khalil and Lee, 2008; Kusiak and Li, 2010).
Consequently, recent literature has documented various wind-speed estimation methods (An and Pandey, 2005; Carro-Calvo et al., 2011; Lombardo, 2012; Qin et al., 2011). In Tan and Islam (2004), the authors used an autoregressive statistical model to estimate WS. However, this approach required intricate calculations and yielded imprecise outcomes for regulating the WT rotor speed. Indeed, these statistical techniques depend on past wind-speed data to anticipate future patterns. Researchers in wind-speed estimation (Costa et al., 2008; Kavasseri and Seetharaman, 2009; Shi et al., 2012; Taylor and McSharry, 2007) have also explored other time-series models, such as the Autoregressive Integrated Moving Average (ARIMA), the autoregressive moving average, and the fractional ARIMA. While these methods demonstrate effectiveness in scenarios with minimal, rapid wind-speed fluctuations, they have encountered challenges when confronted with high-frequency changes. The authors in Bhowmik et al. (1999) employed an iterative algorithm to compute the roots of a WT power coefficient polynomial, enabling them to dynamically assess online wind velocity. However, the real-time computation of polynomial roots presented a time-intensive challenge due to the polynomial’s high order, thus leading to a decline in system performance. In Deng et al. (2019), the authors introduce an algorithm for sensorless WS estimation in variable-speed WTs based on an unknown input disturbance observer and the extreme learning machine. Nevertheless, the accuracy of this estimator may be compromised at specific critical points, particularly during abrupt and unpredictable changes in wind patterns. Another sensorless WS estimation approach is proposed in Naba and Nadhir (2018), utilizing fuzzy logic principles derived from typical WT power curves. However, determining appropriate input limits for this method could pose a challenge. In Tan and Islam (2004), the authors presented a WS estimation method based on an autoregressive statistical model. Despite its potential, this method involves computationally complex calculations, which may limit its practicality. In Yang et al. (2006), the authors introduce an estimator for WS using support vector machine. This estimator is tailored to address challenges associated with small sample sizes, nonlinearity, high dimensionality, and local minima within the given problem context. In Abo-Khalil and Lee (2008), the authors introduce a WS estimation technique utilizing support vector regression for wind power systems. However, it heavily relies on WT power without accounting for power losses, potentially limiting its applicability.
In the same context of the WS estimation, several Artificial Intelligence (AI) techniques have been covered in the literature, including radial basis function NNs, backpropagation NNs, support vector machines, extended Kalman filter-based NNs and support vector regression (Abo-Khalil and Abo-Zied, 2012; Chang et al., 2017; Haque et al., 2012; Jaramillo-Lopez et al., 2016; Jena and Rajendran, 2015; Tian et al., 2011; Wu et al., 2013; Zhou et al., 2011). Additionally, evolutionary approaches like genetic algorithms and particle swarm optimization have been employed to fine-tune weights during the training of ANNs (Li et al., 2016; Nikolić et al., 2016). Recently, the rapid evolution of renewable energy sources, particularly wind energy, has spurred the development of innovative technologies to maximize the efficiency and performance of WECSs. In this pursuit, machine-learning techniques, driven by the power of Artificial Intelligence (AI), have emerged as indispensable tools to enhance the capabilities of WECSs (Farrar et al., 2023). AI-powered machine learning has the advantage of identifying patterns and relationships within complex data, enabling the extraction of valuable insights (Farrar et al., 2023). One notable approach that has gained prominence is the application of Adaptive Neuro-Fuzzy Inference System (ANFIS), a hybrid AI model, in WECSs (Elsisi et al., 2021; Vyas et al., 2022). An ANFIS combines the strengths of NNs and fuzzy logic to create a versatile model capable of capturing intricate nonlinear relationships and handling uncertain or imprecise data (Walia et al., 2015). This synthesis of AI-driven machine learning and ANFIS offers a promising avenue to tackle challenges in WS estimation and optimization strategies within variable-speed WTs (Geçmez and Gençer, 2021; Mohandes et al., 2011; Naidu and Meikandasivam, 2021). As the demand for cleaner and more sustainable energy sources intensifies, the integration of AI and ANFISs into WECSs stands poised to revolutionize the field by unlocking new levels of efficiency and adaptability.
The ANFIS presents a unique amalgamation of ANNs and fuzzy logic systems, offering distinct advantages that make it particularly well suited for addressing complex tasks within wind energy systems (Petković et al., 2013). The ANFIS seamlessly integrates the learning capabilities of ANNs with the interpretability of fuzzy logic, creating a hybrid system that excels in capturing intricate patterns and relationships. The ANFIS architecture consists of interconnected layers that enable it to process input data, extract relevant features, and generate a crisp output. The fuzzy logic component introduces linguistic rules that mimic human decision-making, contributing to the system transparency and the ability to handle uncertainties (Karaboga and Kaya, 2019). The ANN, on the other hand, provides the data-driven adaptability necessary to model non-linearities and complex dynamics. The ANFIS offers the distinct advantage of efficient training, as it combines supervised learning and gradient descent optimization (Karaboga and Kaya, 2019). During training, ANFIS adjusts its fuzzy Membership Functions (MFs) using the backpropagation algorithm or hybrid optimization, iteratively fine-tuning its parameters to minimize prediction errors (Walia et al., 2015). This inherent adaptability empowers the ANFIS to swiftly adapt to changing conditions, a crucial aspect for accurate WS estimation and rotor speed regulation within the context of WT operations.
In this article, a novel approach that harnesses the potential of a machine learning-based ANFIS, to simultaneously provide accurate WS estimation and enhance the MPPT mechanism within variable-speed WTs, is introduced. The proposed approach unfolds in two key stages. In the initial phase, we deploy an ANFIS for WS estimation, utilizing inputs such as the mechanical speed, the aerodynamic power, and the TSR. This estimation process is followed by an offline training phase designed to comprehensively understand turbine power characteristics in relation with the wind and machine speed. Subsequently, for the second phase, the method is adapted for online WS estimation. Subsequently, we move to the MPPT control algorithm’s next stage, which is the design of rotor speed tracking control. For this purpose, we present a secondary ANFIS model, which efficiently regulates mechanical speed, guiding it toward an optimal value to achieve the desired MPPT outcome. The proposed approach operates without the need for any system parameters or WS data in computation, which endows the entire control system with resilience against changing operational conditions.
The validity of the suggested approach is confirmed through simulation in a Matlab-Simulink environment and their performance is investigated in a WT of rated power of 3.5 kW. Furthermore, a comparison with alternative methods is conducted to demonstrate the superior performance of the proposed ANFIS estimator and MPPT controller for the WT.
The article introduces innovative concepts and achieves significant objectives in the field of WECS. These objectives can be summarized as follows:
i. The article presents a novel MPPT control algorithm utilizing an ANFIS approach. This innovative method aims to overcome the limitations inherent in conventional MPPT control algorithms, providing excellent performance in terms of robustness, set-point tracking accuracy, and rapid response time.
ii. A pioneering ANFIS model, focused on WS estimation, is introduced to enhance the accuracy of WS estimation. This model addresses the constraints associated with traditional anemometers and overcomes the limitations of estimators mentioned earlier. The improvements not only refines the precision of effective WS measurement but also results in reduced overall costs and maintenance, thereby enhancing system reliability compared to traditional anemometer usage.
iii. ANFIS is positioned as a powerful soft computing algorithm capable of adapting to a wide array of operating conditions. Leveraging the learning capabilities of ANNs, ANFIS trains input MFs and IF-THEN fuzzy rules. Following the training phase, ANFIS seamlessly adjusts the system’s behavior, demonstrating exceptional robustness in the face of changing conditions and remarkable precision in performance efficiency.
iv. The proposed ANFIS mechanism eliminates the need for complex mathematical models, such as differential equations, when dealing with nonlinearities. Instead, it integrates prior system knowledge to predict future behavior. This approach outperforms ANNs in terms of learning capability, requiring fewer adjustable parameters and achieving faster convergence. Additionally, it boasts low computational complexity, a significant advantage over intricate algorithms with substantial memory requirements and a heavy reliance on parameter selection.
The paper is organized as follows: In section 2, we outline the preliminaries and problem definition. This includes the presentation of the WT model—a 3.5-kW variable-speed WT employed exclusively for simulation purposes. It is worth noting that the utilization of the mathematical model is restricted to simulation, as the suggested controller design is independent of it. Additionally, this section offers a concise overview of the underlying principles of the ANFIS algorithm, along with detailed explanations of the proposed methods for wind-speed estimation and MPPT control design. The results are summarized in section 3. In Section 4, a discussion of the results and comparison with other works is presented. Finally, the conclusion is provided in section 5.
Methods
WECS
A WT harnesses the kinetic energy of the wind and converts it into mechanical energy, subsequently translating this mechanical energy into electrical energy through an electric generator. The aerodynamic power extracted by the WT is a fraction of the available wind power P, as shown by the following equation (Hermassi et al., 2023).

where S represents the rotor swept area (m2), ρ is the air density (kg/m3), V is the WS (m/s), Cp is the power coefficient, β is the pitch angle of the blades (°) and λ is the speed ratio.
The aerodynamic torque (Taer) of the wind rotor is determined as follows (Kraiem and Abbes, 2023):

where Ωmec is the rotational speed of the WT (rad/s).
C p signifies the relationship between aerodynamic power and wind power. This is associated with the pitch angle (β) and the TSR (λ). The expression of the TSR is formulated as follows (Hermassi et al., 2023):

where R is the radius of the surface swept by the blades of the WT (m).
The WT is regulated to capture the maximum available power. According to Betz’s theory, the power coefficient is limited to 0.593 (Hermassi et al., 2022a). This coefficient is influenced by the geometric shape of the blades. In this work, the Cp coefficient is estimated by the following equation (Kraiem and Abbes, 2023):

Figure 1 represents the evolution of Cp according to λ and β. It highlights an optimal speed ratio (λopt = 8.15), where the power coefficient reaches its maximum value (Cpmax = 0.4794) with β = 0. As a result, equation (5) represents the achievable electromagnetic torque utilizing the MPPT technique (Hermassi et al., 2023).

The functioning of the variable-speed WT is categorized into four sections as illustrated in Figure 2.

Cp versus λ.

Operating regions of variable-speed WT.
ANFIS
The ANFIS represents a form of ANNs that integrates with the Takagi-Sugeno fuzzy inference system (Jang, 1993). The parameters of the MF are fine-tuned through a learning procedure using a hybrid algorithm. Typically, ANFIS architectures are composed of six layers: the input, fuzzification, rule, normalization, defuzzification, and output layers, as depicted in Figure 3.

ANFIS architecture.
The number of neurons in each layer is determined by various factors such as the number of input variables, fuzzy sets, and rules. Neurons in the input layer correspond to input features, while neurons in the fuzzification layer represent the fuzzy sets or membership functions. The number of rules determines the neurons in the rule layer in the fuzzy inference system, and the output layer typically contains a single neuron for regression tasks. The process for selecting the number of neurons involves trial and error to fine-tune the architecture for optimal performance during the training phase.
The ANFIS algorithm employs the Sugeno fuzzy model (Jang, 1993), where the fuzzy if-then rules can be represented as follows:
If X is A1n and Y is A2n then

where q, r, and p represent the consequent parameter values of a first-order polynomial. These parameters are adjusted during the learning process using the forward pass technique through the least squares method.

Parameters ai and bi are commonly denoted as the premise parameters.

where j is the number of MFs.


Neuro-fuzzy systems belong to the category of hybrid intelligent systems. These systems process the capability of automatically formulating fuzzy rules by analyzing training datasets and subsequently refining MFs through training. These refined rules enable the system to generate accurate outputs for given input values. The ANFIS can be trained using either the backpropagation gradient descent method or a hybrid algorithm. The hybrid algorithm combines both the least square method and the backpropagation gradient descent method. The training process stops when a specified maximum number of epochs is reached or when a defined minimum error tolerance is achieved. The construction of the FIS can be accomplished through two techniques: subtractive clustering or grid partitioning. Grid partitioning is the preferred choice when the number of input variables is less than six due to its shorter simulation time. Subtractive clustering is employed to generate the FIS when dealing with a higher number of input variables.
Proposed WS estimation
The main concept behind the suggested ANFIS method for estimating WS is to enhance the accuracy of the MPPT algorithm for any given instant of WS, all without the need for an anemometer. This approach, which combines ANN and fuzzy logic systems, essentially emulates the functionality of a virtual anemometer. Essentially, it enables the prediction of the actual WS by the WT model. The configuration of the ANFIS for WS estimation is illustrated in Figure 4.
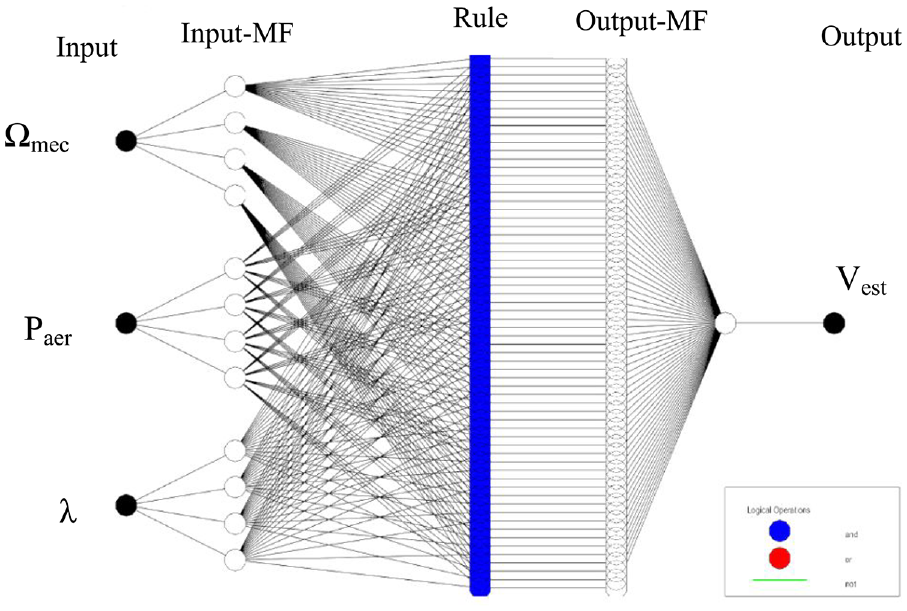
ANFIS structure for WS estimator.
This section discuss an ANFIS model which the measured Paer, Ωmec and λ as the inputs for estimating the effective WS. Due to the nonlinear relationship among Paer, Ω
Statistical properties for WS estimation in WT.

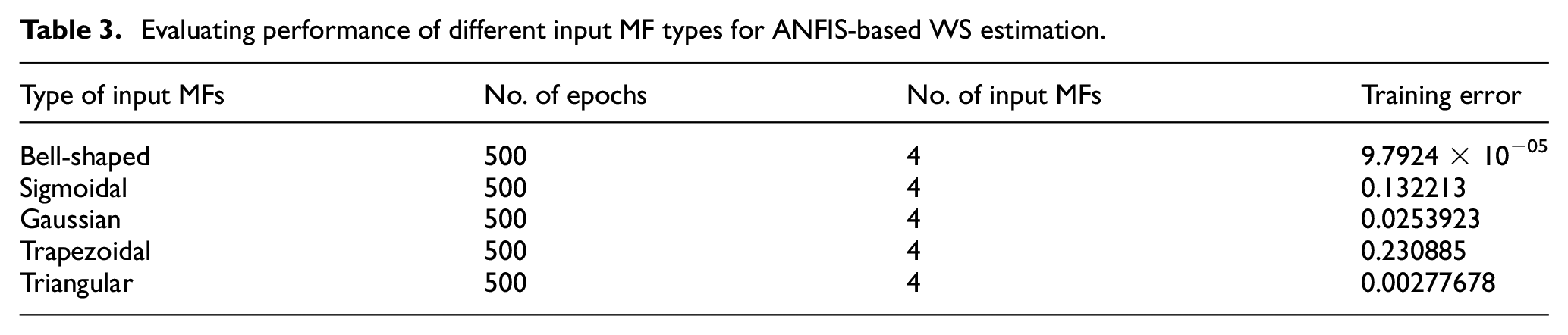
In the previous section, a comprehensive outline of the detailed design process of the ANFIS technique employed in WS estimation has been provided. Within this design process, the selection of the appropriate quantity of if-then rules plays a crucial role in influencing the performance of the output responses. The determination of this rule count needs either careful consideration to prevent an inadequate fit (with too few rules) or an overly complex model (with an excessive number of rules). In this work, the hybrid optimization approach is utilized to update both antecedent and premise parameters. The training process is set to a maximum of 500 epochs, and no error tolerance is allowed. The ANFIS parameters for the WS estimator are presented in Table 2. The ANFIS model is then subjected to training using trapezoidal, triangular, Gaussian, sigmoidal and bell-shaped input MFs. Table 3 illustrates a performance evaluation, contrasting different types of input MFs for the ANFIS-based WS estimation. Figure 5 depicts the trained MFs for mechanical speed, TSR, and power aerodynamics.
ANFIS parameter information for WS estimator.

Evaluating performance of different input MF types for ANFIS-based WS estimation.

Trained MFs of: (a) mechanical speed, (b) TSR, and (c) power aerodynamics.
The result demonstrates that bell-shaped MFs deliver the most optimal outcomes, showcasing a remarkably low training error of 9.7924 × 10−5. Figure 6 depicts the training result of bell-shaped input MFs for 500 epochs.

Training error of bell-shaped MFs after 500 Epochs.
Proposed MPPT speed control
In this part, our focus is directed toward Zone 2, as illustrated in Figure 2, which necessitates the implementation of the MPPT algorithm. Consequently, the control algorithm involves regulating the electromagnetic torque of the generator to align the mechanical speed with a set reference value. This action aims to optimize the power extraction from the turbine. As a result, the generator speed requires precise control. The structure of the MPPT speed control is illustrated in Figure 7.
ANFIS structure for MPPT algorithm.
At a specific operational point, the maximum aerodynamic power is attainable when the wind system operates with its maximum power coefficient Cpmax. This objective is realized when the TSR λ reaches its optimal value λopt = 8.15. Consequently, the reference speed of the generator (Ω*mec) is achieved using equation (11).

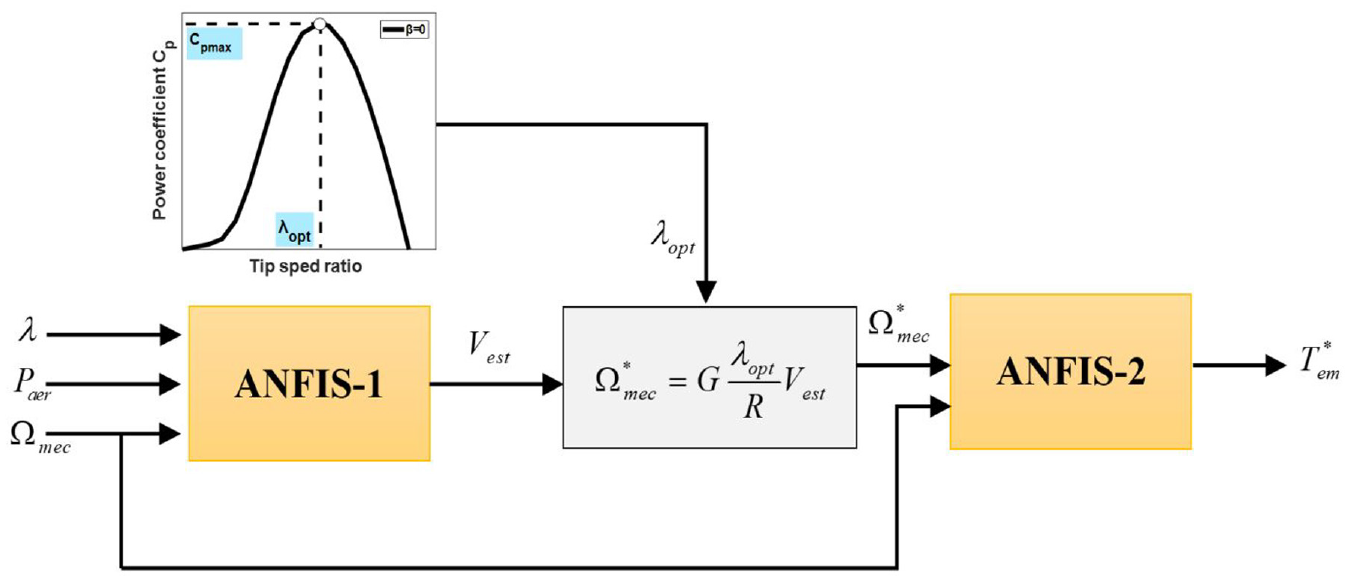
In this method, the reference electromagnetic torque T*em, utilized to govern the rotor speed of the Permanent Magnet Synchronous Generator (PMSG) is acquired from the output of the speed controller. In this context, the ANFIS is suggested to regulate the mechanical speed during WS estimation Vest in order to guarantee the extraction of the maximum power. The architecture of the proposed ANFIS-MPPT approach is illustrated in Figure 8.

ANFIS structure for MPPT method.
The inputs for the ANFIS consist of the reference mechanical speed (Ω*mec) and the measured mechanical speed (Ωmec). The resultant torque (T*em) is the output generated by the ANFIS controller. Table 4 shows the ANFIS parameter information for the MPPT algorithm.
ANFIS parameter information for MPPT algorithm.

Results
In the beginning, the first ANFIS for estimating WS consists of three inputs: the mechanical speed, the aerodynamic power, and the TSR. The ANFIS model is then trained offline and the parameters of the ANFIS are updated using hybrid optimization. The desired error is set to zero. Next, the second ANFIS-based MPPT is developed, where the inputs are the mechanical speed and its reference, and the output is the optimal electromagnetic torque. The performance of the suggested ANFIS models is evaluated using the Matlab-Simulink environment for a WT with rated power of 3.5 kW.
To evaluate the effectiveness of the suggested ANFIS algorithm in MPPT strategies, a comparison is carried out with the traditional Proportional Integral (PI) controller and the MPPT Without Speed Control (WSC) using equation (5). Additionally, a comparison is performed between the proposed ANFIS approach and alternative control methods detailed in distinct research papers. Figure 9 represents the comparison between the original and estimated WS using the ANFIS. Figures 10 to 12 depict the power coefficient Cp, the TSR λ and the mechanical speed, respectively.
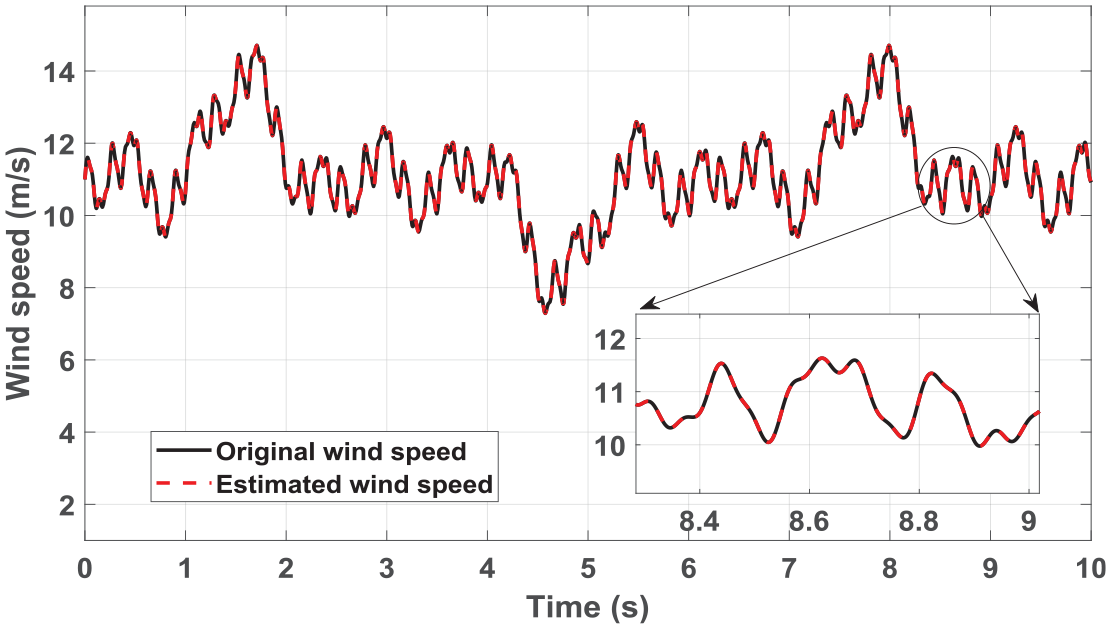
Comparison between original and estimated WS using ANFIS model.

Power coefficient for estimated WS.

TSR for estimated WS.

Mechanical speed for estimated WS.
Discussion
As shown in Figure 9, the estimated WS is close to the original WS with negligible estimation deviations, which prove the excellent performance of the ANFIS. Figures 10 to 12 distinctly illustrate the ANFIS approach, showcasing its notably superior dynamic performance in comparison to the traditional PI and WSC methods in terms of accurate tracking, precision, and rapid response times. The high error observed close to the starting time (time zero) is attributed to significant damping during the initial turbine operation.
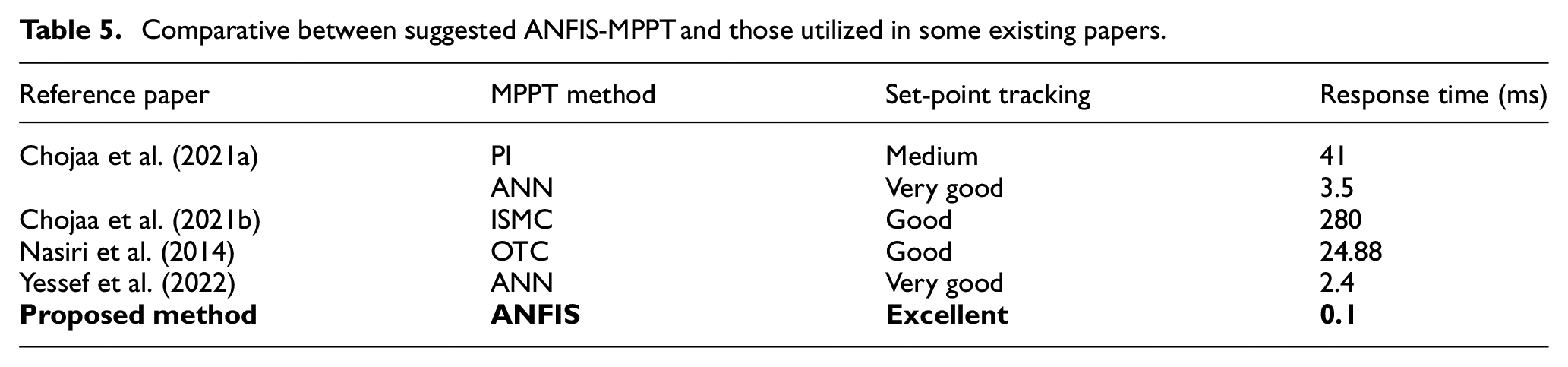
The comparison summarized in Table 6 encompasses various performance metrics. The results clearly demonstrate that when compared with other methods, the ANFIS controller achieves faster response time with 0.1 ms and exhibits superior precision and accuracy in tracking for MPPT control. These findings underscore the significant advantages of employing advanced control methodologies, such as ANFIS, to enhance the overall efficiency and accuracy of the system compared to PI, Integral Sliding Mode Controller (ISMC), OTC, and ANN controllers. The remarkable outcomes achieved through the ANFIS emphasize the potential of utilizing NN-based FLC controllers in complex systems, particularly where precision and rapid response time plays crucial roles in achieving optimal system performance (Table 5).
Comparative between suggested ANFIS-MPPT and those utilized in some existing papers.
Comparative between training error of proposed ANFIS-based estimator and those utilized in some existing papers.

Moreover, Table 6 presents a comparison with the root mean square error for training of the ANFIS model with other work for WS estimation. As shown, the proposed model for estimating WS gives a low error for training an error of 9.7924 × 10−5. This allows us to conclude that the suggested model has more precise and excellent performance in understanding the relationship between the inputs and the output for WS estimation. In addition, the ANFIS-based WS estimator outperforms the ANFIS model in Mohandes et al. (2011) not only in terms of precision and performance but also in simplicity. The model incorporates only three inputs and four MFs, whereas the competing model in Mohandes et al. (2011) relies on three inputs with six MFs. This highlights the elegance and efficiency of our proposed approach.
In the online WS estimation and the design of MPPT control strategies, the use of ANFIS presents a compelling approach. The ANFIS offers distinct advantages in scenarios where precise mathematical models of the system might be elusive. Instead, the ANFIS harnesses prior knowledge about the system to predict its future behavior, sidestepping the necessity for intricate mathematical equations. Moreover, the ANFIS employs simplified mathematical computation to effectively handle nonlinearities, diverging from the complexity of differential equations. In the context of rule-based fuzzy systems, the efficacy often rests on the expertise of rule developers and their understanding of system behavior. However, the ANFIS sets itself apart by autonomously generating fuzzy rules through the analysis of training data, a feature that enhances its adaptability and effectiveness. One noteworthy aspect of the ANFIS is its ability to maintain model compactness by utilizing a reduced number of fuzzy rules, an advantage it holds over traditional fuzzy models. This inherent efficiency, bolstered by straightforward mathematical calculations and support for parallel computation, not only streamlines system intricacies but also accelerates the estimation process. In the context of WS estimation and MPPT control design, these attributes carry significant weight. By integrating the strengths of both fuzzy systems and ANNs, the ANFIS offers a promising avenue for achieving precise WS estimation and efficient MPPT control design in scenarios where accuracy, rapid response time, and system complexity are crucial factors.
However, despite its numerous advantages, it is essential to acknowledge a notable limitation of the ANFIS in the context of WS estimation and MPPT control design. The automatic generation of fuzzy rules, while being a remarkable feature, can inadvertently introduce a challenge. The process can potentially result in a significant number of generated rules, increasing the computational complexity of the system.
Conclusion
In this article, an adaptive neuro-fuzzy mechanism with hybrid intelligent learning is proposed for estimating the WS and enhancing the MPPT control design in a variable-speed WT. Firstly, the proposed ANFIS-based WS estimator, developed in Matlab, was trained for 500 epochs using a hybrid optimization method with various MF types, showing lower training error with a bell-shaped curve. The wind speed estimates produced by the proposed ANFIS exhibit high accuracy, closely mirroring actual wind speed data. This precision demonstrates the estimator’s effectiveness and ratability in estimating effective wind speed. Subsequently, the output of the WS estimator determines the optimal mechanical speed for MPPT control in a variable-speed WT.
Secondly, we propose an ANFIS that regulates the mechanical speed toward its optimal value for achieving MPPT operation. The ANFIS-MPPT method proves superior in set-point tracking and response time, achieving a rapid response time of 0.1 ms compared to alternative techniques. This method not only excels in MPPT control but also reduces costs by eliminating the need for mechanical WS sensors, enhancing control reliability, and minimizing downtime. The proposed approach minimizes expenses associated with mechanical WS sensors and improves control reliability by avoiding sensor failure during harsh weather, potentially reducing WT downtime. The ANFIS is computationally intelligent, robust, and ideal for rapidly estimating effective WS and achieving MPPT in WTs. Future work includes experimental implementation on an FPGA board to validate the proposed method’s efficacy and applicability.
Footnotes
Authors' Note
Mohamed Ali Hajjaji is now affiliated to Higher Institute of Applied Sciences and Technology of Sousse, University of Sousse, Sousse, Tunisia. Youssef Kraiem is also affiliated to ESEO-IREENA Lab UR 4642, Nantes University, Angers, France.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.