
Abstract
Aircraft landing is a critical operation for both terminal airspaces and airports. This study presents a multi-objective optimization model for this problem and aims to minimize the total flight time and emission value. A point merge system and vector maneuver techniques are implemented in aircraft to regulate air traffic. The model uses the augmented è-constraint method to reveal objective function relationships. To test the performance of the mathematical model, several realistic scenarios are generated and solved by GAMS/CPLEX solver. The algorithm can obtain Pareto-optimal solutions for each air traffic situation. In addition, noticeable reductions were observed in most of the Pareto-optimal solutions in emission values. The results showed that total emissions value and flight time were reduced up to 4.69% and 0.92%, respectively, compared with the first-come-first-served approach.
Keywords
Economic developments worldwide have led to the rapid growth of air transportation, with an average annual growth rate of 3.5% between 1989 and 2019 ( 1 ). Although the COVID-19 pandemic caused a 33% reduction in the global commercial air traffic volume in 2020, the international air traffic growth rates are predicted to recover to 2019 values by 2024 ( 2 , 3 ). The rapid growth in air traffic causes disruptions and congestion in air traffic control (ATC) systems. Air traffic services are essential to aircraft within the airspace in the cruise, approach/descend, and ground phases of flights to ease the congestion. Approach and descend operations occur in the terminal maneuver area (TMA), a transition area between airport and cruise operations. Because of the limited airspace configuration of TMAs, congestion can be observed during peak hours. Standard terminal arrival routes and instrument departure routes are presented to overcome this situation. Furthermore, airport management can construct new runways to compensate for this demand. Air traffic controllers (ATCOs) need to use additional separations techniques (i.e., vector maneuver, speed reduction, holding points, ground holding) to regulate air traffic flow. Also, advanced decision support systems are developed to provide relevant advice for the airport and airspace managers. Airborne and ground delays severely affect airlines and airport management because delays increase operational costs, decrease passenger comfort, and affect ground operations. In addition to delays, the level of on-time aircraft performance is another essential indicator to determine the efficiency of an airport. Therefore, reducing airborne and ground delays and the number of delayed aircraft is critical for airlines, airport operators, and ATC service providers. Considering the airport and TMA operations together is crucial in presenting a more efficient aircraft sequencing that decreases delays and significantly increases the punctuality of flight operations.
Several studies have been presented to solve aircraft sequencing and scheduling problems (ASSP), aircraft landing problems (ALP), and aircraft departure problems, including exact and near-optimal solution methods. For example, Bennell et al., Zhang et al., and Messaoud have presented comprehensive reviews about the ASSP problem ( 4 – 6 ). Most investigated objective functions for this problem are: minimizing total cost, minimizing total delay, minimizing the deviations from the target landing time, and minimizing completion time ( 7 – 32 ).
Several multi-objective optimization models have been presented for this problem. Tang et al. introduced a model that aims to minimize the total aircraft delay and total cost using a multi-objective evolutionary algorithm to solve this problem (
34
). Balakrishnan and Chandran introduced a dynamic programing model for the runway scheduling model under a constrained position shifting (CPS) approach (
25
). They utilized the CPS approach to maintain fairness among the aircraft. The CPS approach allows the aircraft to change its initial sequence maximum
Mokhtarimousavi et al. also proposed a new mathematical model using a non-dominated genetic algorithm for the ALP problem ( 35 ). They aimed to optimize runway throughput, ground costs, and air costs for 20 and 50 aircraft. Hong et al. presented a mixed-integer linear programing (MILP) model aiming to minimize total flight time, and the number of positions shifted in aircraft ( 29 ). They applied an epsilon constraint technique to obtain Pareto-optimal results. Samà et al. proposed another MILP model using several objective functions and analyzed their similarity and differences ( 36 ). Bennell et al. presented a dynamic programing approach for a multi-objective optimization problem ( 17 ). Their objective functions were to minimize average landing time, completion time, deviations from the time window, and extra fuel costs. Tian et al. presented a multi-objective optimization model using non-dominated sorting genetic algorithm II (NSGA II) to minimize emission, noise, and holding time ( 37 ). They used the arrival fix allocation problem for aircraft sequencing. Also, they aimed to find the best TMA entry point combination to support continuous descent operations (CDO) within the TMA. They compared their result with the first-come-first-served (FCFS) approach. Zhang et al. presented a multi-objective model ( 5 ). They also implemented an imperialist competitive algorithm to solve the problem. Dönmez et al. proposed a multi-objective mathematical for the ASSP to minimize total fuel consumption, total delay, and total flight time ( 38 ). They used two-point merge systems (PMS) and five parallel runways for this problem. Rodríguez-Díaz et al. presented a multi-objective model and aimed to minimize fuel consumption and delay together ( 39 ). Their results indicated that significant fuel savings could be achieved without changing the aircraft arrival trajectories by assigning landing time and landing runway under the CPS approach. Cecen introduced a multi-objective MILP model for ASSP ( 40 ). Ground holding, airspeed reduction, and PMS methods were selected to provide conflict-free TMA operations. The objective function aimed to minimize both total aircraft delay and the number of total conflict resolution maneuvers. Yin et al. also presented a multi-objective evolutionary algorithm to optimize delay, emission, and throughput ( 41 ). Moreover, they added two different uncertainties and compared the results with the FCFS approach. Although they estimated emissions for taxiing, descent/approach, and take-off phases, they did not include the emissions during the level-offs within the TMA. Unlike the previous studies, the current study implemented GAMS/CPLEX for the exact solution of the MILP model. Realistic vector maneuvers were applied to avoid aircraft conflict before entering the TMA, and the PMS system was also used. PMS is a sequencing technique that eases and improves aircraft arrival operations. It has a merge point and two sequencing legs. PMS allows ATCOs to regulate air traffic without using vector maneuvers, but, in this study, aircraft conflicts are also controlled before the entrance of sequencing legs. If any conflict occurs at the entry of the sequencing legs, ATCOs implement suitable vector maneuvers to selected aircraft to maintain conflict-free operations. Furthermore, emission values were estimated for constant-flight-level flights, which can occur on the sequencing legs and vector maneuver.
The contributions of this study are as follows. First, the proposed model reveals the relationship between the total flight time and the total emission. This relationship has not been examined in the ALP literature, to the best of the authors’ knowledge. Second, a new multi-objective MILP model is presented to solve ALP. Third, the model aims to provide executable instructions for ATCOs and pilots considering environmental effects. Fourth, emission values of the level-off flights, which perform at constant altitude within the TMA, were estimated and added to the model for several aircraft types. Lastly, CPS was added to the new mathematical model to find the balance between initial arrival planning and optimal sequencing without distracting the ATCOs’ concentration.
The rest of the paper is structured as follows. The next two sections define the problem and present the mathematical model. The final two sections include experimental results and conclusions.
Problem Definition
The practical and efficient sequencing of aircraft is essential for conflict-free arrival operations. The ALP problem is a combinatorial optimization problem that aims to obtain runway use sequence while optimizing the objective functions without violating the operational constraints.
Air Traffic Control (ATC)
This study concentrated on the runway in Istanbul Sabiha Gökçen International Airport, Turkey, (LTFJ) within Istanbul TMA, presented in Figure 1. According to the General Directorate of State Airports Authority, it has a single runway and was the second busiest airport in 2020 and 2021 in Turkey ( 42 ).
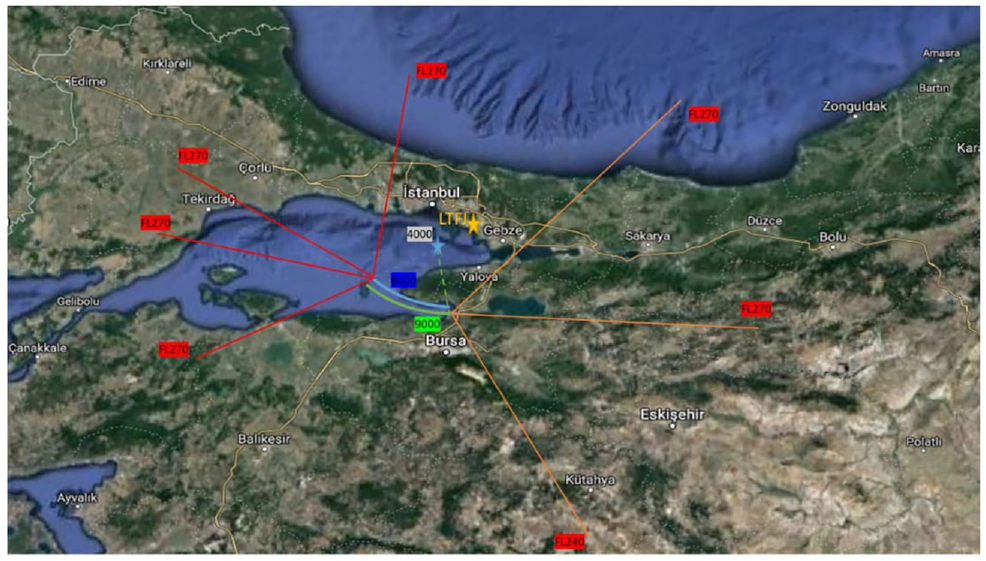
The entry point and its location within Istanbul terminal maneuver area (TMA).
PMS is a frequently used sequencing method and has been implemented in several studies (29, 43–49). In this study, it is assumed that the TMA accepts the arrival operations using seven entry points. Aircraft descend directly from the entry point to the sequencing legs. The PMS has a merge point and two sequencing legs separated vertically by 1,000 ft. Aircraft do not use airspeed change maneuvers on the sequencing legs. Furthermore, aircraft can perform vector maneuvers to prevent collision right before entering the TMA with constant airspeed on the horizontal plane. During the vector maneuver, the aircraft performs this operation with a constant bank angle of 20
Eight different aircraft types were selected in this study to represent realistic traffic scenarios, and their wake turbulence categories are determined as heavy and medium. Half of the aircraft are medium, and the other ones are heavy. Using different aircraft plays a role in revealing the conflicting relationship between the objective functions and representing the realistic traffic situation. Each aircraft type has a different engine; therefore, aircraft emission values differ. The aircraft types were selected among the aircraft using this airport. The rate of used aircraft in this study is very high in European air traffic operations. Vortex separation minima are presented in Table 1.
Vortex Separation Minima (Sölveling and Clarke) (Second) ( 33 )

Note: A = Arrival; D = Departure.
Emission Calculation
Aircraft produce several pollutants during their take-off, climb, en route, approach, and landing phases. These pollutants mainly contain nitrogen oxide (NOx), carbon monoxide (CO), hydrocarbon (HC), carbon dioxide (CO2), and sulphur dioxide (SO2). In this study, NOx, CO, and HC pollutants emissions are considered functions of fuel flow rate. The emission parameters are provided by the International Civil Aviation Organization (ICAO) Aircraft Engine Emissions Databank ( 50 ). The relationship between the environmental effects of NOx, CO, and HC and aircraft flight time are investigated in this study. To calculate the emission values for each pollutant, the emission index (EI) must be estimated—this is described as the amount of emission produced by the unit fuel consumption. The EI of NOx, CO, and HC mainly depends on the aircraft engine type; therefore, the generation rate of each pollutant varies according to the engine types and flight phases. The ICAO Aircraft Engine Emissions Databank has the EI of each pollutant for the take-off, climb, approach, and idle steps corresponding to the fuel flow rate for the International Standard Atmosphere (ISA) conditions. Therefore, a minor correction is required to estimate the more realistic values of these pollutants according to the altitude and environmental effects, which are obtained using the Boeing fuel flow (BFF) method 2 ( 51 ). BFF uses various correction factors for the different flight phases to include the effect of the environmental control system (ECS) because, while the fuel flow rates are estimated, factors such as temperature, pressure, and air-conditioning effects are disregarded. By using this conversion, any emission values can be easily calculated for any phase of the flight ( 37 , 52 ). The correction factors are given in Table 2.
Correction Factor (CF) for the Effect of the Environmental Control System System on Fuel Flow

Therefore, the corrected fuel flow (FF) of an aircraft can be formulated as follows:

In Equation 1,

where
EI = emission index,
FF = corrected fuel flow rate (kg/s),
N = number of engines, and
t = operation time (s).









The definitions of the abbreviations used in Equations 3 to 11 are presented in Table 3.
Definitions of the Abbreviations Used in Equations 3 to 11.
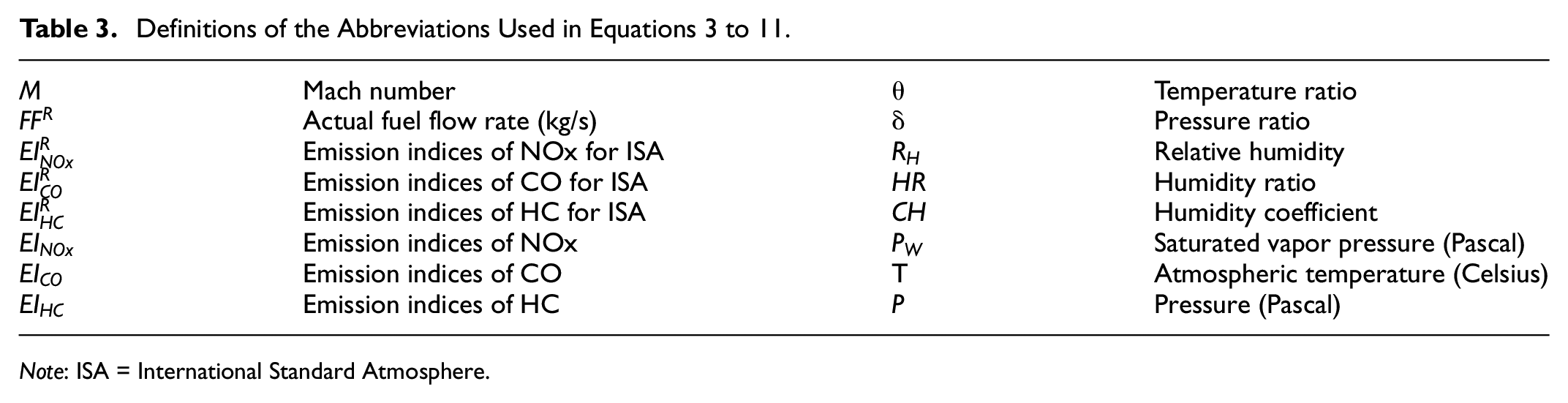
Note: ISA = International Standard Atmosphere.
Mathematical Model
This study presents a multi-objective MILP model to minimize both total flight time and total emission. A multi-objective optimization approach is implemented in this study because there is a conflict between objective functions. The augmented epsilon constraint method has never been applied to the ALP. The mathematical model of the considered problem (M) is as follows.
Indices:
I set of aircraft
Parameters:
M1: big enough number
Decision variables:
(M):


Subject to



















The objective functions minimize the total aircraft emission value (12) and the total flight duration (13). Constraint (14) estimates the entrance time of sequencing legs for each arrival aircraft. Moreover, Constraints (15) and (16) maintain the collision avoidance at the entrance of sequencing legs if the aircraft
Augmented
-Constraint (AEC) Method
While f(x) is the objective vector corresponding to the solution x (x

If the nadir point of the problem is

Here, XE shows the efficient solution set.
The ε-constraint (EC) method is one of the well-known scalarization techniques. In this method, one of the p objectives is selected as an objective function, and remaining objectives are converted to the inequality constraints using the ε value as the bound. The Augmented ε-constraint (AEC) method was developed by Mavrotas in 2009 to prevent weakly efficient solutions which can be obtained by the EC method ( 53 ). Two crucial differences between the AEC method and the EC method are that the lexicographic ordering approach is used while creating the trade-off table, and the ECs are converted into equality constraints by adding the slack/surplus variable. By adding these variables to the objective function, it is possible to obtain efficient solutions, since all objectives can be considered.
The steps followed to solve the problem under consideration with the AEC method are given below.
Step 1: Calculate the ideal
Step 2: Assign
Step 3: Solve the (M-AEC) model for the current value of ε. Add the resulting solution
Step 4: If
The scalarized model (M-AEC) with the AEC and the additional parameters and decision variables used in this model is given below.
Parameters:
Decision Variable:
a: slack variable added to the EC.
(M-AEC):

Subject to:
(14)–(32)


Scalarized objective function is given in Equation 35. Constraint (36) is the EC for the first objective. Constraint (37) is a sign constraint.
Experimental Results
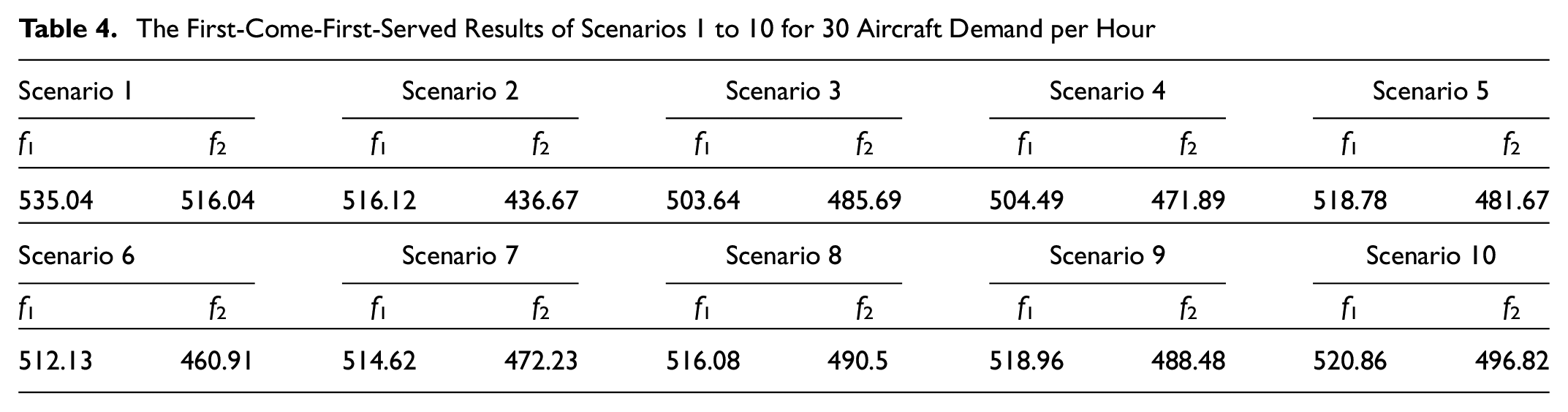
The proposed mathematical model was solved using GAMS/CPLEX solver for air traffic flow rates of 30 aircraft per hour. Ten different air traffic situations were created, each with a particular entry time, entry point, aircraft performance category, and aircraft operation type. Therefore, each scenario presents a different traffic situation. This study generated different scenarios to analyze the relationship response between two objective functions in various traffic situations. The expected time of arrivals was determined using exponential distribution and aircraft performance category, and route assignments were generated using the normal distribution. CPS was determined as 3 for each scenario. The GAMS/CPLEX solver obtained Pareto-optimal results for all test problems. A computer with a 2.6 GHz Intel Core i7 processor and 32 GB RAM was used in all computations. The FCFS results of total flight time (
The First-Come-First-Served Results of Scenarios 1 to 10 for 30 Aircraft Demand per Hour
The Results of Scenarios 1 to 5 for 30 Aircraft Demand per Hour
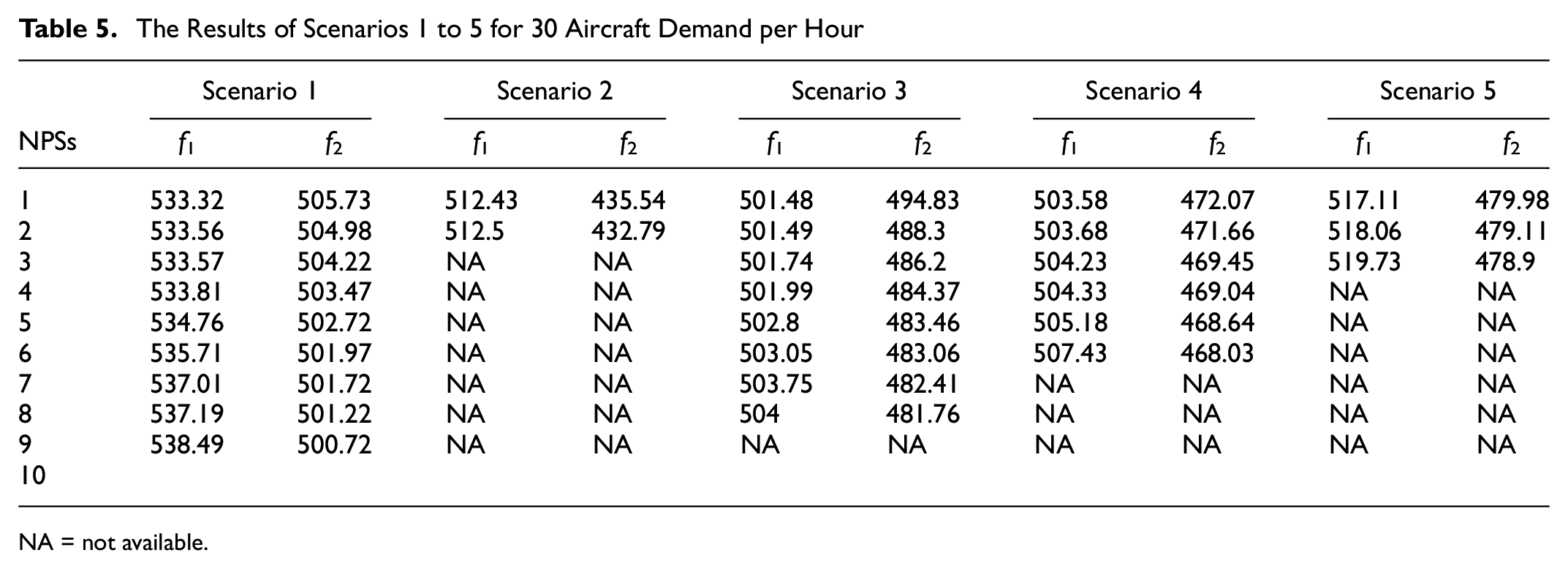
NA = not available.
The Results of Scenarios 6 to 10 for 30 Aircraft Demand per Hour
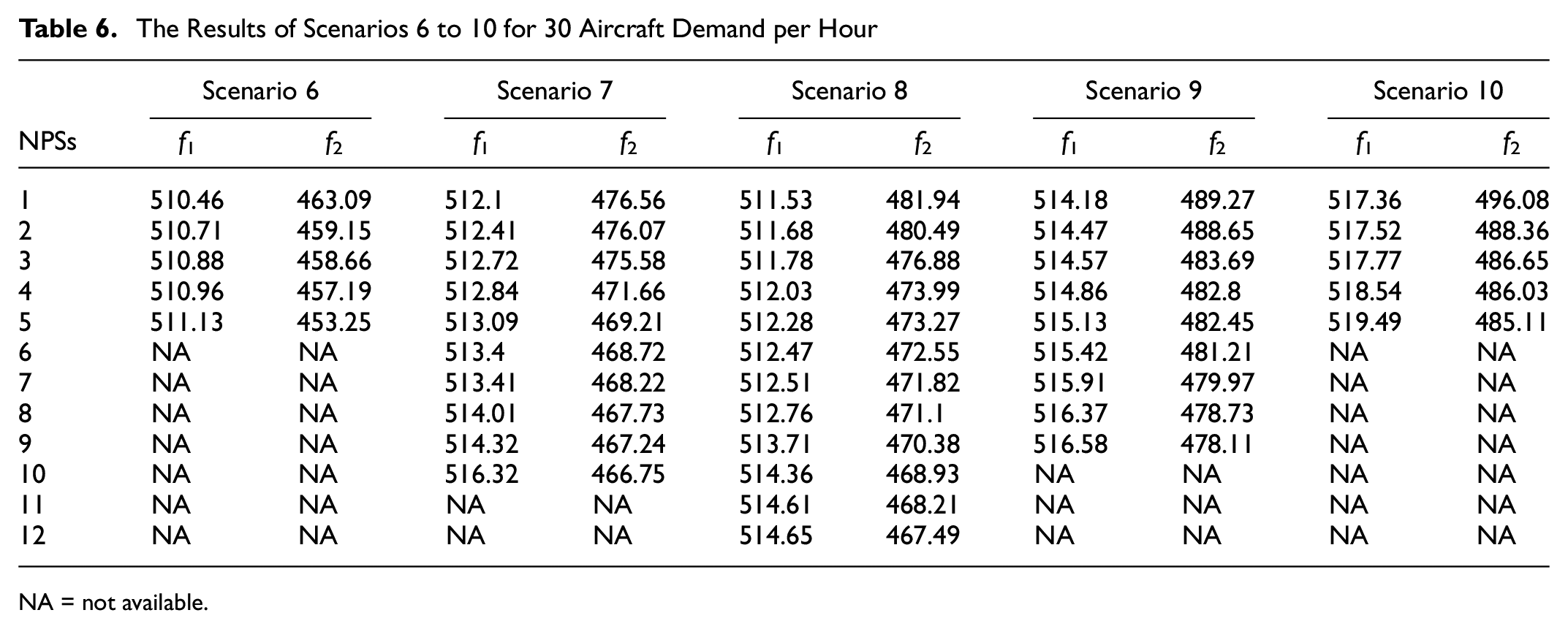
NA = not available.
The results demonstrated that, for Pareto-optimal solutions, total flight time and total emission decreased for scenarios 2, 8, and 10. The reduction in the flight time varied between 1.43 and 4.55 min for these scenarios. Similarly, the average enhancement rates of all Pareto-optimum solutions considering total emission value were calculated as 0.57%, 3.54%, and 0.57% for scenarios 2, 8, and 10, respectively, comparing the FCFS approach. The total flight time increased for some Pareto-optimal solutions for scenarios 1, 3, 4, 5, and 7. The maximum increase in flight time was determined as 3.45, 0.36, 2.94, 0.95, and 0.2 min, respectively. The average flight times of the Pareto-optimal solutions were decreased by 0.23 and 0.24 min compared with the FCFS results for scenarios 1 and 4, respectively. The average flight time rose 1.1, 0.48, and 2.68 min for scenarios 3, 5, and 7 compared with the FCFS results. The total emissions were improved for all Pareto-optimal solutions for scenarios 1, 2, 5, 8, and 10. The results showed that total emissions value and flight time were reduced up to 4.69% and 0.92%, respectively, compared with the FCFS approach. The average enhancement rates of Pareto-optimum solutions in relation to total emissions are given in Table 7. The first row shows the scenario numbers, and the second row presents average enhancement rates.
The Average Enhancement Rates (%) of Pareto-Optimum Solutions in Relation to Total Emissions Comparing the First-Come-First-Served Approach

The occurrence of lower emissions can assist airlines in creating less pollution and reducing fuel costs. The number of Pareto-optimal solutions for each scenario is presented in Figure 2.
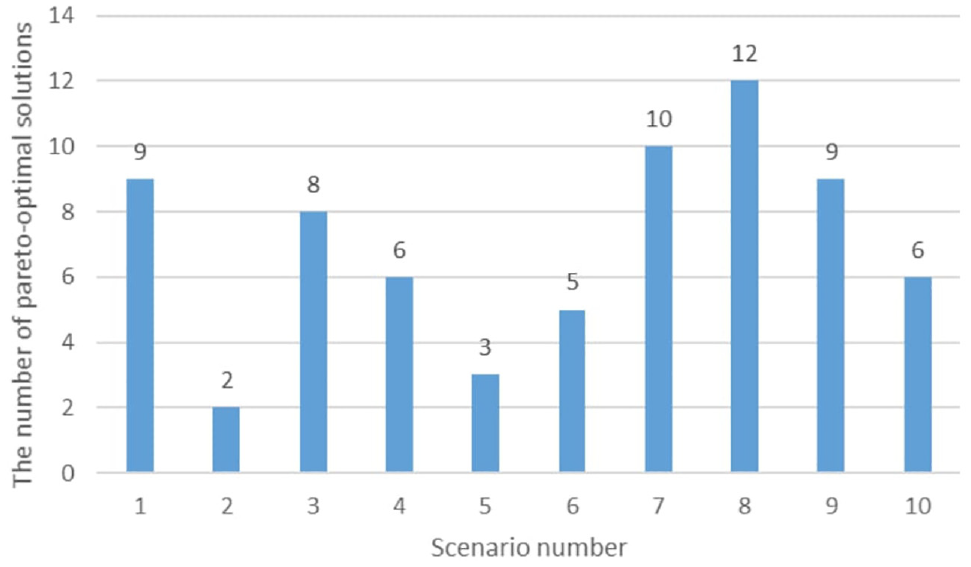
Number of Pareto-optimal solutions in scenarios.
The maximum and minimum NPSs were obtained as 12 and 2, as seen in Figure 2. The mean and standard deviations for the Pareto-optimal solutions were calculated as 7 and 3.16, respectively. The Pareto-optimal solutions for scenarios 8 and 9 are presented in Figures 3 and 4.

The representation of Pareto-optimal solutions in Scenario 8.

The representation of Pareto-optimal solutions in Scenario 9.
The number of Pareto-optimal solutions for Scenario 8 was obtained as 12. All Pareto-optimal solutions reduced the total flight time and emission value compared with the FCFS results.
The number of Pareto-optimal solutions for Scenario 9 was obtained as nine. In addition, although seven Pareto-optimal solutions reduced the total emission value, all Pareto-optimal solutions improved the total flight time value compared with the FCFS results.
Conclusion
This study presented a multi-objective MILP model for ALP, a complex decision task for ATCOs. The necessary delays are applied to aircraft using PMS and vectoring techniques. Total aircraft flight time and total emission value were calculated, and the relationship between the objectives was revealed. To find the Pareto-optimal solutions, the AEC method was implemented. The results demonstrated that emission can be noticeably decreased using advanced sequencing techniques because sequencing and avoidance maneuvers accounted for between 3.9% and 12.3% of the total emission value among all Pareto-optimal solutions. A large part of the emission occurred inevitably as a result of descent operations. Therefore, even minor improvements are practically crucial for both ATCOs and airlines. CPS was added to the model to minimize massive deviations from the initial sequence because the aim was to reduce gas emissions without increasing the time of the re-sequencing. The arrival operations in the TMA generally take place mainly at hub airports close to the densely populated urban areas. Therefore, reducing gas emissions will increase the air quality of these residential areas around the airport. Furthermore, the shortening of flight times helps increase TMA and airport capacities and allows airlines’ personnel to take part in more flight operations.
Footnotes
Author Contributions
The authors confirm contributions to the paper as follows: study conception and design: R. Cecen, S. Tugba, C. Cetek; data collection: R. Cecen, S. Tugba, C. Cetek; analysis and interpretation of results: R. Cecen, S. Tugba, C. Cetek; draft manuscript preparation: R. Cecen, S. Tugba, C. Cetek. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.