
Abstract
Both drivers and the current state of advanced driver-assistance systems (ADASs) are imperfect, but their collaboration as a team can compensate for individual limitations. Unstructured driving environments (e.g., parking lots and off-road trails) entail greater challenges for an ADAS and require driver–automation collaboration. However, few studies describe the factors shaping drivers’ subjective experience of collaboration with driving automation in unstructured environments. In this study, we examined the effects of collaboration effort and input method on drivers’ subjective experience, including mental workload, trust, and perceived usability. In addition, we examined how collaboration is experienced differently across different age groups. In this driving simulation study, participants collaborated with a hypothetical ADAS to navigate two unstructured driving environments. The results indicate that collaboration effort and input method did not directly affect drivers’ collaboration experience. However, examining the effect of collaboration effort by driver age suggests that older drivers (55 years old and over) experienced higher mental workload and gave lower usability ratings to the collaboration method than younger drivers. These results imply that older drivers may experience more challenging collaboration than younger drivers when they must devote substantial cognitive effort to collaborate with automation. The findings suggest designing driver–automation collaboration features to reduce cognitive effort for older drivers navigating unstructured driving environments. Moreover, future research must examine drivers’ collaboration experiences based on their unique situations, shaped by the interplay between situational properties (e.g., task demands) and driver characteristics (e.g., age) rather than relying on a limited understanding of individual factors.
Keywords
The process of driving a vehicle is transitioning from a driver’s exclusive task to an activity that includes some automation. Automation has relieved drivers from many duties, but there are still many limitations that prevent a vehicle from driving by itself without a driver’s intervention. The Society of Automotive Engineers (SAE) J3016 taxonomy ( 1 ) defines driving automation at six discrete levels, from fully manual driving (Level 0) to fully automated driving (Level 5). Of these, Levels 2 and 3 describe longitudinal and lateral vehicle control as a secondary (Level 2) or primary (Level 3) driver. Within these levels, active collaboration between a driver and an automation system can overcome the limitations of driving automation and extend its use. Automation can safely be used to execute longitudinal and lateral vehicle control. Thus, an advanced driver-assistance system (ADAS) can increase safety and reduce a driver’s workload by taking over several elements of the driving task ( 2 , 3 ). However, an ADAS’s operational design domain (ODD) is limited. The ODD refers to the operating conditions under which an ADAS is designed to function ( 4 ). For example, most production-level ADASs cannot operate in unstructured environments, such as parking lots and off-road trails. Unstructured environments are areas without standard road features that an ADAS can leverage to plan and navigate a path toward a destination ( 5 ). Meanwhile, human drivers can handle most of these environments and offer guidance to automation systems ( 2 ).
From the drivers’ perspective, there are benefits to helping automation instead of immediately taking over vehicle control to handle the ODD limit. Assisting an ADAS without fully disengaging it keeps a driver in the control loop and prepared to drive safely if situations demand driver intervention ( 2 , 6 ). Moreover, collaboration might impose a smaller workload ( 2 , 7 , 8 ) and reduce anxiety levels ( 2 ), compared with taking control and manually driving, but it might also make the division of responsibilities ambiguous and promote social loafing ( 9 ) and complacency ( 10 ). Therefore, driver–automation collaboration to complement these limitations stands as the main teaming requirement before fully automated driving can be achieved. While driver–automation collaboration is essential in navigating unstructured environments, several automation and driver characteristics (e.g., required effort, input method, driver age) could undermine the collaboration and merit attention.
Efforts to Collaborate with Automation
Although collaborating with a driving automation system can bring benefits, drivers will not collaborate if it takes more effort than manually driving the vehicle. For this reason, the drivers’ effort is the central consideration in implementing driver–automation collaboration. The general concept of effort can be defined in various ways. Here, we operationally define effort as the mental workload required for collaborating with automation. This definition was inspired by arguments emphasizing the importance of mental workload in driving tasks ( 11 ) and the increasing cognitive nature of human–automation collaboration ( 12 ). We also dissociate the level of collaboration effort from the level of automation. A higher level of automation may require less collaboration effort from drivers. However, the required effort can also vary within the same level of automation. For example, some ADASs can require different levels of driver engagement, which can be monitored using different metrics (e.g., steering torque versus glance and head pose) while using the same level of driving automation (e.g., Level 2). Drivers’ collaboration experience with an ADAS may improve if they put less effort into collaborating ( 2 , 8 ). However, relatively few studies have investigated how collaboration effort affects drivers’ multifaceted subjective experience (e.g., workload, trust, and usability).
Input Method for Driver–Automation Collaboration
The input method for driver–automation collaboration is another factor that may affect drivers’ collaboration experience. Several studies have been conducted to reduce drivers’ collaboration efforts using high-level commands (e.g., change lanes, turn left) to direct an ADAS’s movement without driving manually ( 2 , 6–8, 13 ). Studies in this approach used touchscreen buttons ( 6 , 13 ), hand gestures ( 6 , 7 , 13 ), joysticks ( 6 , 7 , 13 ), and steering wheel buttons ( 8 ). Findings from these studies show that when drivers had to intervene to handle an ADAS’s ODD limit, high-level commands (e.g., “pass the pedestrian” and “turn right”) reduced their workload ( 2 , 7 , 8 ) and anxiety ( 2 ), compared with when they took over to drive manually. For example, Kuribayashi et al. ( 8 ) asked drivers to direct an automation system to pass or wait for a pedestrian who did not express a clear intention to cross the road—a decision better suited for drivers. The drivers were asked to direct automation using a steering wheel button or touchscreen or to intervene manually using the accelerator pedal. Their workload decreased when they used the steering wheel button or touchscreen to direct the automation system to pass or wait for the pedestrian, compared with when they had to intervene manually using the accelerator pedal. These studies suggest that providing options for drivers to give high-level commands to automation using alternative input methods, such as a steering wheel button, improves their collaboration experience. However, driver–automation collaboration in unstructured driving environments, such as in street parking and off-road driving has received little attention in these studies. Testing driver–automation collaboration in unstructured driving environments can offer valuable insights, as automation systems show limited capabilities in these environments, where the need for collaboration is high.
Age-Related Challenges in Driver–Automation Collaboration
While collaboration effort and input method are factors determined by system design, some cognitive challenges are determined by driver characteristics, such as age. Therefore, understanding the effects of driver characteristics and their associated challenges can provide important insights into designing for certain driver populations and mitigating their unique challenges. Among many populations, we focused on the older driver population. The older population is considered one of the main beneficiaries of driving automation ( 14 ) and is projected to grow rapidly over the next decades ( 15 ). Aging has been frequently associated with cognitive decrements in perception, attention, and response selection in driving ( 16 ). In automated driving, older drivers have shown degraded performance, particularly during the transfer of control, exhibiting slower takeover times ( 17 ) and lower post-takeover quality ( 16 , 18 ). The transfer of control during automated driving can be cognitively demanding ( 16 ), so taking full vehicle control in unexpected and complex unstructured driving environments can be difficult for older drivers. Nevertheless, the alternative method of collaborating with the ADAS has been underresearched, especially concerning the benefits to older drivers in unstructured driving environments.
Study Objectives
Evidence reviewed so far suggests that a lower collaboration effort may promote driver–automation collaboration and enhance drivers’ collaboration experience with automation. Moreover, input methods can also change the collaboration experience by increasing ( 3 , 19 , 20 ) or decreasing ( 2 , 6 , 8 ) collaboration efforts. Although older populations benefit significantly from driving automation, they may encounter challenges in unstructured driving environments that hinder a positive collaboration experience. However, drivers’ subjective experience of collaboration in such environments and how it is moderated by collaboration effort, input method, and age have gained little attention. To fill the gap, we conducted a driving simulation study to investigate (a) the level of effort drivers are willing to accept to collaborate with the ADAS, (b) the preferred input method for the collaboration, and (c) how age moderates the effects of collaboration effort and input method on collaboration experience. To investigate these research questions, we implemented a conceptual ADAS and a human–machine interface (HMI). During the driving simulation, participants collaborated with the ADAS to perform tasks outside its ODD, and their subjective collaboration experience was measured.
Methods
Participants
A total of 65 participants were recruited from the greater Detroit area. Data from three participants were excluded from further analysis because they could not complete the experimental procedure due to motion sickness. The data from the remaining 62 participants were analyzed (female = 33, mean age = 41.89, standard deviation [SD] of age = 14.82). Participants were recruited if they were over 20, had held a valid U.S. driver’s license for at least 2 years, and were in good health. Participants received $100/h compensation for their participation, which lasted about 1 h and 40 min.
Apparatus and ADAS
A full vehicle compartment driving simulator with a 360° × 30° roadway view was used for the study. The ADAS was equipped with SAE Level 2 automation capabilities. The ADAS controlled the lateral and longitudinal vehicle movements throughout the situations without any failure, except when the drivers were instructed to take vehicle control.
Study Design
We conducted the study as a part of a larger-scope study ( 21 ) and placed two unstructured driving environment situations at the beginning and the end of a 40-min drive. Specifically, the driving simulation started from a residential area where three input methods were tested (this was the unmapped area navigation situation). After driving on a city road for about 40 min, the simulation ended at a street parking zone, where three levels of collaboration effort were tested (this was the collaborative parking situation). We analyzed the situations separately and used a 3 × 2 between-subjects design for each situation. In the unmapped area navigation situation, input method (steering wheel button, voice command, touchscreen gesture) and driver age (younger, older) were between-subjects variables. For the collaborative parking situation, collaboration effort (high, moderate, low) and driver age were the between-subjects variables.
These two situations featured tasks where both the driver and the automation system could benefit from collaboration. Drivers could reduce their mental workload by letting the automation system control vehicle movements. The automation system could rely on drivers’ perception and decision-making capabilities to perform the tasks that it could not (e.g., recognizing a desired route or a reserved parking sign and selecting appropriate actions). Table 1 describes the first between-subjects factors unique to each situation (input method, collaboration effort). In the unmapped area navigation situation, participants were randomly assigned to use either a steering wheel button, voice command, or touchscreen gestures as the input method. The ADAS asked drivers for directions on arrival at an intersection or a roundabout (direction point). Each participant’s role was to direct whether to go straight, turn right, or turn left by pressing the arrow buttons on the steering wheel, giving a voice command, or making a hand gesture using a touchscreen placed on an infotainment display. Participants passed three direction points, where they were required to give driving instructions using the assigned method.
Key Independent Variables (IVs), IV levels, and Corresponding Driver Roles for Each Scenario
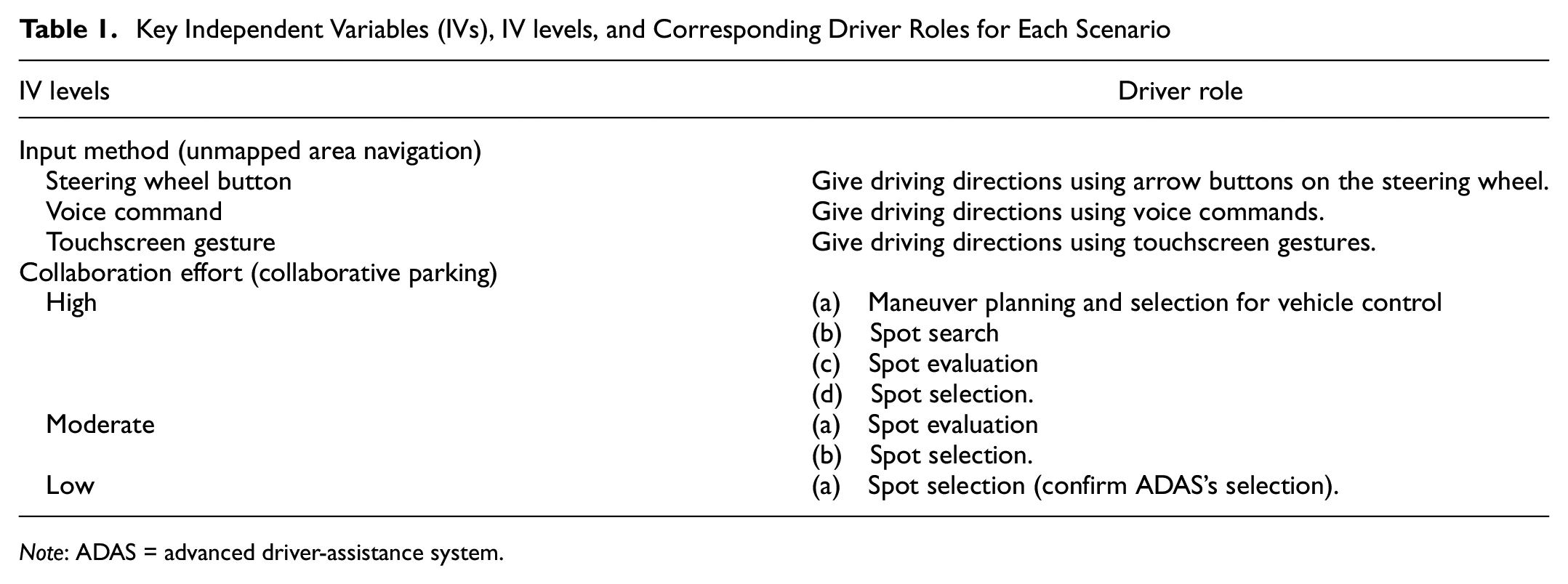
Note: ADAS = advanced driver-assistance system.
In the collaborative parking situation, participants were randomly assigned to one of three collaboration effort conditions (high, moderate, or low effort). Collaboration effort was manipulated additively by reducing more cognitive driving tasks from high- to low-effort conditions. The proposed ADAS in the high-effort condition mimicked currently available automatic parking features. In this condition, participants had to override vehicle control when the ADAS entered the street parking zone. Therefore, these participants had to plan and select maneuvers to operate the vehicle, search for and evaluate available parking spots, move the vehicle next to an open spot, and finally decide whether to park. In the moderate-effort condition, the ADAS controlled longitudinal and lateral vehicle movements, relieving drivers from maneuver planning and selection. The vehicle stopped in front of three potentially empty spots. The driver’s role was to determine whether the spots were reserved and then select or pass the spot by pressing the arrow buttons on the steering wheel. Finally, in the low-effort condition, the ADAS controlled the longitudinal and lateral movements, evaluated the parking spot, and stopped in front of an unreserved spot. The driver only had to confirm the ADAS’s final decision about the spot.
The second between-subjects variable was driver age, which was common in both situations. Drivers were categorized as younger (younger than 55 years old) or older (55 years or older), following Boyle et al. ( 22 ). As a result, 45 participants were categorized as younger drivers (mean age = 34.07, SD = 10.24), and 17 were categorized as older drivers (mean age = 60.06, SD = 2.70). An even number of drivers for both groups would have been ideal, but we recruited an even number of participants for four age groups (20–24, 25–39, 40–54, and 55+) to meet the requirements of the larger-scope study.
Driving Situations
Figure 1 shows the road layouts and screen captures of the situations. Participants experienced two different situations in unstructured driving environments, each taking about 1 minute to complete.

Road layouts and screen captures of the driving situations: (a) unmapped area navigation; (b) collaborative parking.
Unmapped Area Navigation to Test Input Method
This situation started in a residential area where the map information was not up to date or not registered to the ADAS’s navigation system (Figure 1a). The ADAS could drive by itself but did not have the geographic information to navigate to the main road. However, participants knew the way because they memorized the map showing the route to the main road in the study briefing session. As the ADAS drove slowly at 15 mph, it encountered two three-way intersections, followed by a roundabout (direction point). The ADAS stopped in front of these direction points and played a chime and a voice message requesting drivers’ directions. Participants had 5 s to provide direction to the ADAS using steering wheel buttons, voice commands, or touchscreen gestures (input method). The ADAS moved to the next direction point after a pleasant chime when the participant provided the correct direction. The ADAS rejected the participant’s input and started moving after a warning chime if the participant provided a wrong direction or failed to respond within the 5-s time limit. The input method functionalities and the ADAS’s feedback were implemented using the Wizard-of-Oz method.
Collaborative Parking to Test Collaboration Effort
In this situation (Figure 1b), the ADAS drove the vehicle into a street parking zone at 35 mph and reduced the driving speed to 20 mph. The ADAS stopped three times in front of three open spots for 5 s, except in the high-effort condition, where drivers had to move the vehicle in front of an open spot manually. In the moderate- and low-effort conditions, participants had to evaluate and select (moderate effort) or confirm (low effort) the spot within the 5-s time limit. The first two open spots had an orange cone with a “Reserved” sign, indicating that the driver could not park in those spots. This sign became visible only when the ADAS was about 50 ft from the sign. We intentionally placed the reserved parking signs to simulate a task that is difficult for an ADAS but easy for human drivers. In the moderate-effort condition, the ADAS rejected the participant’s input and automatically proceeded to the next spot if the participant chose the first two open spots. The ADAS also moved toward the next spot if the participant failed to provide input within the time limit.
Procedure
The overall study procedure is shown in Figure 2. On arrival, participants signed a consent form and completed a pre-study survey. Next, in the training session, participants learned about the ADAS and input methods and were given instructions for the situations. For the unmapped area navigation situation, they were instructed to memorize a simple map (Figure 1a without the text bubbles) to give the ADAS driving directions. They were also instructed in using the input method to provide driving directions. For the collaborative parking situation, participants were instructed on how to collaborate with the ADAS to perform the parking. A practice drive concluded the training session, where participants used an ADAS that could drive independently and handle most road events. After the training session, participants experienced a 40-min main drive. The main drive started in a residential area for the unmapped area navigation situation. Then, participants were guided to a main city road, where they experienced six situations that are not described in this paper for brevity. Participants did not perform any secondary non-driving task but were instructed to watch the road ahead and intervene when they felt necessary or requested by the ADAS. The drive ended as the ADAS arrived at the street parking zone, and the participant completed the collaborative parking task. After completing the main drive, a post-study survey and a debriefing were conducted.

Procedure of the larger-scope study. Driving situations and subjective measures beyond the current paper’s scope are grayed out.
Dependent Variables and Analysis
Participants’ subjective responses to three different levels of collaboration effort and input devices were measured using four surveys. First, a “propensity to trust” survey ( 23 ) was administered in the study briefing session to measure participants’ initial trust in automation before receiving experimental treatments. In the debriefing session, the NASA-Task Load Index (NASA-TLX) ( 24 ) was used to measure participants’ mental and physical workload while performing assigned tasks in the two situations. The Situational Trust Scale for Automated Driving (STS-AD) ( 25 ) measured participants’ trust in the ADAS after receiving experimental treatments. The System Usability Scale (SUS) ( 26 ) measured the perceived usability of the input methods and the collaborative parking feature. We aggregated the survey data across the subscales, except for the NASA-TLX. NASA-TLX’s mental and physical workload subscales were used instead of its composite measure, following the suggestion of Bolton et al. ( 27 ). We used Hartigan’s dip test (test of unimodality; “diptest” R package), skewness, and kurtosis tests (“moments” R package) to inspect the data. The results indicate that most data were skewed and formed unimodal distributions. Therefore, we standardized the data using log transformation for regression analysis and estimated standardized regression coefficients to provide comparable estimates of effect sizes across situations ( 28 ).
Note that we analyzed the data from two situations separately. Collaboration effort was fixed in the unmapped area navigation situation, whereas the input method was fixed in the collaborative parking situation. Accordingly, constructing a full regression model with situation, collaboration effort, input method, and age as predictors, so combining the data from the two situations, was not feasible. Consequently, five linear regression models were fitted, one for each survey measure (propensity to trust, mental workload, physical workload, STS-AD, SUS) from the unmapped area navigation situation. These models were expressed as

The input method factor had three levels (steering wheel button, voice command, and touch screen) and the age factor had two levels (younger and older drivers), making it a 3 × 2 design. Likewise, another five regression models were fitted, but using the collaborative parking situation data. The models were expressed as

The collaboration effort factor had three levels (high, moderate, and low) and the age factor had two levels, making it a 3 × 2 design, as in the unmapped area navigation data analysis. As a result, we fitted a total of ten regression models, five from the unmapped area navigation situation and the rest from the collaborative parking situation, each containing a different set of predictors.
Lastly, we performed additional analysis on the original four age groups to identify effects related to driver groups under 55. However, the results consistently showed effects only for drivers older than 55, so we only report comparisons between younger and older drivers. Finally, the p-values from the regression models were adjusted using the false discovery rate correction to minimize Type 1 error inflation by multiple comparisons and measures.
Results
This study was an investigation of how collaboration effort affects driver–automation collaboration (collaborative parking). The appropriate input method for the collaboration (unmapped area navigation) was identified, and the way in which age moderates the effects of collaboration effort and input method was examined. Therefore, the results and discussion sections are organized in the order of the research questions (collaborative parking situation first) rather than the order of situations drivers experienced during the study (unmapped area navigation situation first). Lastly, the propensity to trust survey results are not shown in Figures 3 and 4 because they do not reflect drivers’ states after receiving experimental treatments.
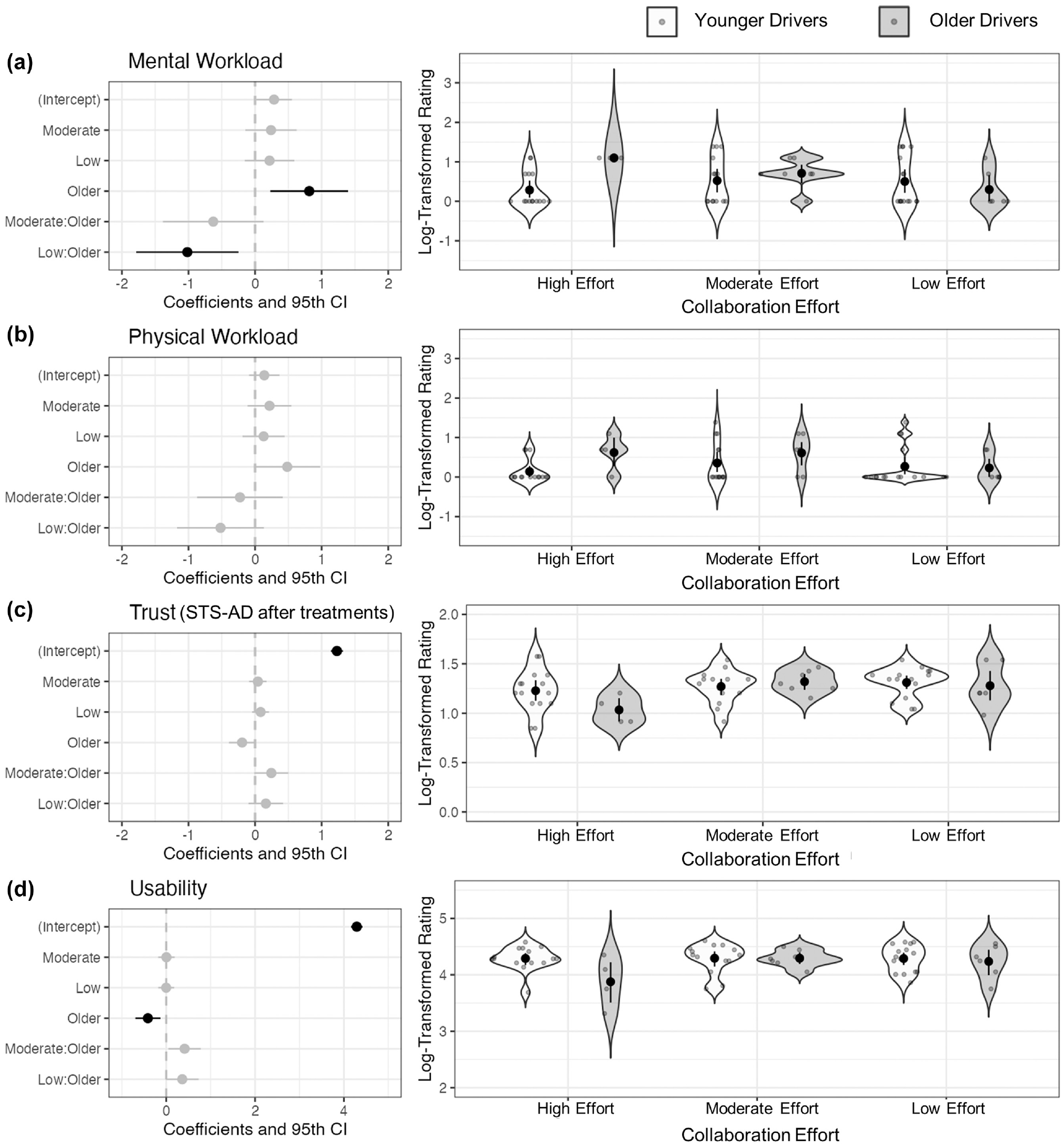
Collaborative parking situation data, showing standardized regression coefficients (left) and descriptive statistics (right): (a) mental workload; (b) physical workload; (c) trust (Situational Trust Scale for Automated Driving [STS-AD] after treatments); (d) usability. Left: Point ranges show each model term’s regression coefficient and 95% confidence interval (CI). The black bold point range indicates the statistical significance compared with the reference condition (high, younger driver, high:younger) at the 0.05 alpha level after false discovery rate correction. For example, the point range in Figure 3a’s “older” row indicates that the main effect of age was statistically significant and that older drivers’ mental workload was higher than younger drivers (reference condition). Right: Individual data points are shown as gray dots. Black dots and error bars represent the condition average and 95% CI.

Unmapped area navigation situation data, showing standardized regression coefficients (left) and descriptive statistics (right): (a) mental workload; (b) physical workload; (c) trust (Situational Trust Scale for Automated Driving [STS-AD] after treatments); (d) usability. Left: Point ranges show each model term’s regression coefficient and 95% confidence interval (CI). The black bold point range indicates the statistical significance compared with the reference condition (steering wheel button, younger driver, steering wheel:younger) at the 0.05 alpha level after false discovery rate correction. No effects other than the intercept effects reached significance. Right: Individual data points are shown as gray dots. Black dots and error bars represent the condition average and 95% CI.
Collaborative Parking
Figure 3 shows the standardized regression coefficients (left) and the descriptive statistics (right) from the collaborative parking situation data. Significant effects were found from the mental workload and the usability data. The mental workload data revealed a significant main effect of age,
Conversely, no significant effect was found from the propensity to trust (trust before treatments, not reported in Figure 3), physical workload (Figure 3b), and trust data (STS-AD administered after treatments; Figure 3c). Intercept values indicate beta coefficients given reference conditions are true and, thus, have no implications.
Unmapped Area Navigation
Figure 4 shows the regression coefficients (left) and the descriptive statistics (right) from the unmapped area navigation situation data. All effects of interest failed to reach significance at the p < 0.05 level.
Discussion
We investigated how collaboration effort, input method, and age affect drivers’ collaboration with ADAS in two unstructured driving environments. No main effects of collaboration effort and input method were found. However, in the collaborative parking situation, older drivers generally experienced higher mental workload than younger drivers. This effect appeared to be driven by older drivers in the high-effort condition, as they reported the highest level of mental workload, while other groups reported relatively similar levels. This observation was supported by the significant interaction of age and collaboration effort, indicating that the tendency of older drivers to experience higher mental workload disappeared in the low-effort condition. Similar results were observed in the usability data, with older drivers reporting lower perceived usability for the collaborative parking feature than younger drivers. Although the interaction of age and collaboration effort was nonsignificant, descriptive data suggested that all driver groups except older drivers in the high-effort condition reported similar levels of perceived usability, indicating that the main effect of age was driven by older drivers in the high-effort condition. These findings suggest that there are specific situations where older drivers might be more vulnerable, particularly those requiring high cognitive effort to collaborate with automation, although older drivers generally have similar collaboration experiences with automation to younger drivers.
Additionally, three limitations of this study call for further investigation. First, we examined collaboration effort based on the assumption that the physical workload from manual driving would be greater than the mental workload from monitoring ADAS behavior, such that relieving drivers from the manual driving task would reduce the effort. Hypothetically speaking, the mental workload from monitoring ADAS could be substantially greater. In this case, the required collaboration effort would have been greater in the low-effort condition than in the high-effort condition. We think that this possibility is minimal, based on the physical workload data. However, a more comprehensive measure of effort is required to accurately understand drivers’ collaboration efforts. Moreover, no significant effect associated with driver age or input method was obtained in the unmapped area navigation situation. This is possibly because drivers were instructed to guide the ADAS to go straight three times while performing no other concurrent tasks. Therefore, drivers could perform the navigation task under a low mental workload, so the input method had a negligible effect on the collaboration experience. This possibility is in agreement with previous findings that an input method improves driver–automation collaboration by reducing the effort required from drivers. For example, research on the voice command method explained its advantages as being less distraction from the road ahead, high learnability ( 29 ), less physical interference with manual vehicle control ( 19 ), and the utilization of different cognitive resources ( 30 ). In future studies, the implementation of more challenging tasks or situations, which can reveal the benefits and costs of different input methods, should be considered. Lastly, we associated collaboration challenges with age-related cognitive impediments, which might not be the only factor shaping older drivers’ collaboration experience. Older drivers exhibit variability in their acceptance and utilization of automation ( 31 ) and are influenced by various situational factors, such as task complexity. Therefore, further investigations, considering direct cognitive performance measures, individual differences, and situational factors, are needed to gain a comprehensive perspective on their collaboration with automation systems.
Conclusion
Driver–automation collaboration can expand an automation system’s ODD and enable drivers to benefit from its execution of demanding driving tasks. However, the way in which the collaboration effort, input device, and age shape drivers’ subjective collaboration experience with automation systems in unstructured driving environments remains largely unknown. This study demonstrates that older drivers might undergo more challenging experiences than younger drivers, especially in situations requiring high cognitive efforts to collaborate with automation systems in unstructured driving environments. However, such challenging experiences often arise from the interplay between individual characteristics (e.g., age) and situational constraints (e.g., task demand), making it difficult to identify the challenges by examining only one dimension of collaboration. We propose the development of collaboration methods that involve less cognitive effort to collaborate with automation systems for older drivers navigating unstructured driving environments. Furthermore, we suggest that future research to improve driver–automation collaboration should leverage multifaceted examinations to better understand drivers’ collaboration experience with automation.
Footnotes
Author Contributions
The authors confirm contribution to the paper as follows: study conception and design: J. Lee, H. Rheem, J. D. Lee, J. F. Szczerba, A. Rajavenkatanarayanan, R. Mathieu; data collection: J. F. Szczerba, A. Rajavenkatanarayanan, R. Mathieu; analysis and interpretation of results: H. Rheem, J. Lee, J. D. Lee; draft manuscript preparation: H. Rheem, J. Lee, J. D. Lee, J. F. Szczerba, A. Rajavenkatanarayanan, R. Mathieu. All authors reviewed the results and approved the final version of the manuscript.
Declaration of Conflicting Interests
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: Joseph F. Szczerba, Akilesh Rajavenkatanarayanan, and Roy Mathieu are employed by the General Motors Global Research and Development Center, and received funding for the research, authorship, and publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors received financial support from the General Motors Global Research and Development Center for the research, authorship, and publication of this article.