
Abstract
Through a review of long-range transportation plans and interviews with planners, this article examines how large metropolitan planning organizations are preparing for autonomous vehicles. In just a few years, the prospect of commercially available self-driving cars and trucks has gone from a futurist fantasy to a likely near-term reality. However, uncertainties about the new technology and its relationship to daily investment decisions have kept mention of self-driving cars out of nearly all long-range transportation plans. Nevertheless, interviewees are keeping a close watch on the new technology and actively looking to understand and plan for future impacts.
Keywords
Introduction
Self-driving cars are no longer science fiction. In 2005, five research teams’ self-driving vehicles completed the Defense Advanced Research Projects Agency’s (DARPA’s) 150-mile obstacle course designed to challenge autonomous vehicles and spur new technological innovations. A year earlier, no team had completed even a tenth of the course. Google, which subsequently hired engineers from several of the winning teams, has developed semi-autonomous vehicles that have driven more than a million miles on city streets and highways. The company recently unveiled a fully autonomous prototype car with no brake pedal, accelerator, or steering wheel and plans to test the cars on its campus (Markoff 2014). Most major car manufacturers already market and sell high-end vehicles with features like automated braking, self-parking, lane-departure warning, and variable-speed cruise control. Most are also racing to develop fully autonomous vehicles. Nissan announced that it plans to mass-market cars with automated steering, braking, and acceleration by 2020 (Nissan 2014).
The freight and transit industries will be likely early adopters of driverless technologies since the higher vehicle costs will be offset by lower labor costs. Daimler recently began testing an autonomous 18-wheeler prototype on public roads in Nevada (Davies 2015). Many transit agencies and airports already have decades of experience operating driverless trains on fixed guideways (Furman et al. 2014), and the European Union–funded CityMobil2 has already begun testing driverless transit on public streets (CityMobil2 2015).
Within the next twenty years, fully autonomous vehicles will likely be commercially available and driving themselves on city streets and highways. By removing humans and human error from the driving task, autonomous vehicles have the potential to reduce congestion and traffic collisions dramatically (Shladover 2000; Thrun 2010; Fagnant and Kockelman 2014; Anderson et al. 2014; Winston and Mannering 2014). Self-driving freight, transit, and personal vehicles may also alter how people and goods move and where households and firms choose to locate. The policies, regulations, plans, and technologies adopted for autonomous vehicles will influence the scale and perhaps even the direction of these impacts.
Despite a history of and purported focus on projecting and planning for the future (Isserman 1985; Myers and Kitsuse 2000; Cole 2001; Couclelis 2005), the planning profession has a somewhat poor track record of preparing for new transportation technologies. Brown, Morris, and Taylor (2009) argue that planners’ inability to foresee the impacts of private cars at the beginning of the twentieth century contributed to the proliferation of an engineering-dominated vision of urban highways that focused almost entirely on vehicle throughput. Instead they either ignored the car, which proceedings of the 1909 First National Conference on City Planning mentioned just once, or embraced it as a solution for problems related to crowding and animal-powered transportation (Foster 1979; Brown, Morris, and Taylor 2009). When developing the interstate highway system, many planners and city boosters advocated for urban highways to stem blight and strengthen the urban core (Mohl 2004; Hall 1996, chap. 9), though the highways almost certainly encouraged suburbanization and urban flight (Baum-Snow 2007; Duranton and Turner 2012).
Similarly, misunderstandings about aviation technology, the importance of the postal service, and commercial air-carriers reduced planners’ ability to influence airport locations or surrounding land uses (Bednarek 2001, chap. 5; Barrett 1999). Again, planners viewed the new technology primarily as a welcome tool to alleviate the concern of the day: urban crowding. More recently, Shoup (1997, 1999, 2005) has argued that planners helped create “perhaps the greatest [planning disaster] of all time” (2005, 218), by misunderstanding parking supply and the effects of minimum parking requirements.
Planners may yet again fail to influence the relationship between cities and a new transportation technology by either misunderstanding driverless cars or seeing them as a solution for contemporary planning problems, such as road congestion or climate change. After 20 years of stable research into self-driving cars, there has been a recent spike in the number and proportion of papers and projects about autonomous vehicles listed on the Transportation Research Board’s TRID database (Figure 1). Most of the work focuses on technology, regulatory policy, and the likely impacts on safety or highway capacity (Kalra, Anderson, and Wachs 2009; Anderson et al. 2014; Fagnant and Kockelman 2014, 2015). (For a recent summary of the literature and state of technology and policy, see Wagner et al. 2014 or Williams 2013). One study surveyed state and local transportation officials to determine which regions are best prepared to embrace and implement new technologies like self-driving cars (Shaheen, Camel, and Ullom 2014). No published research considers the impacts on cities or planning in more than a cursory way.
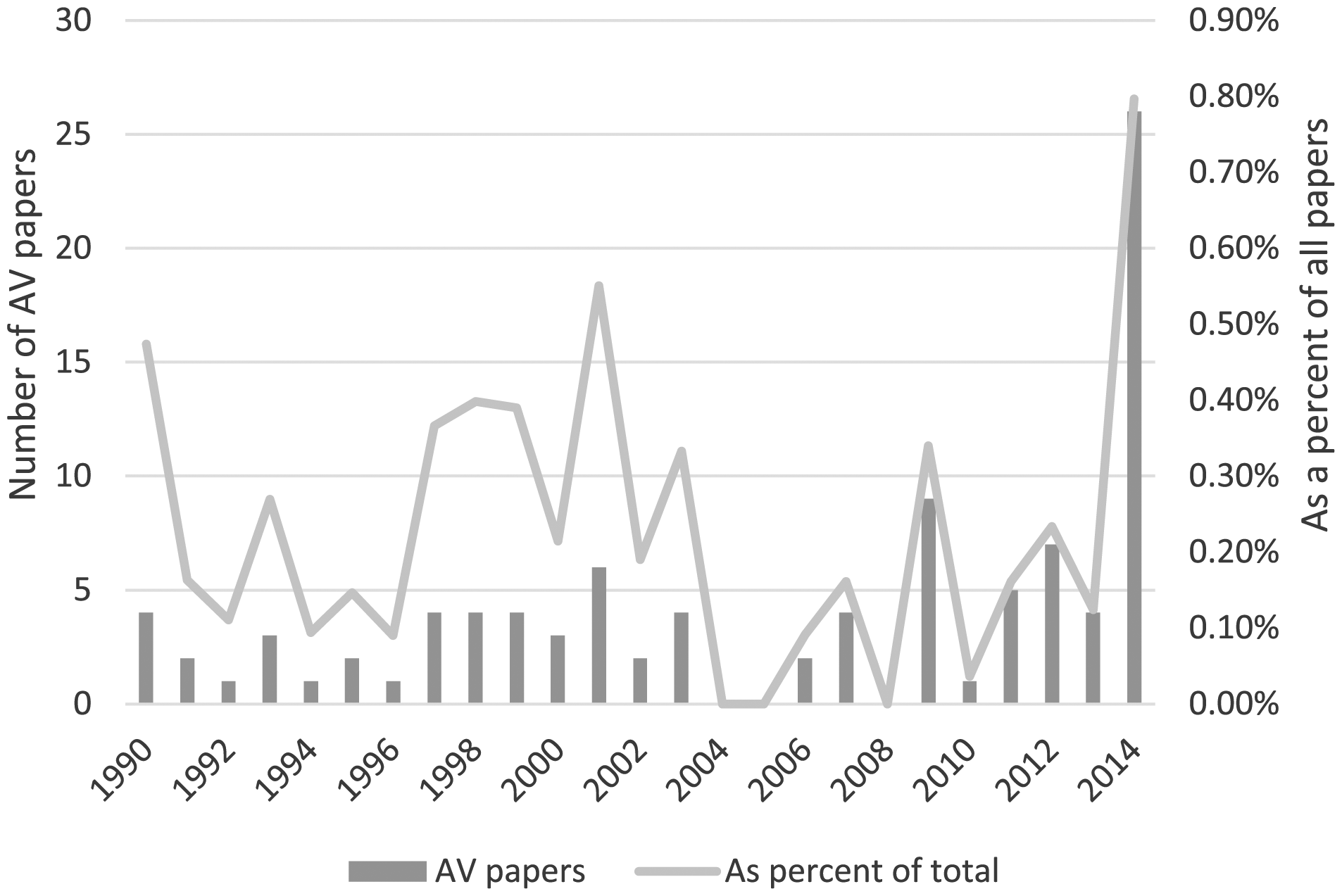
Recent publications and projects about self-driving or autonomous vehicles (AVs) listed in the TRID database (Transportation Research Board 2015).
This study is the first to investigate how a group of planners—those from large metropolitan planning organizations (MPOs)—are preparing for what is potentially the most transformative transportation technology since the internal combustion engine and the mass-produced automobile. After briefly describing autonomous vehicles, I structure the research design, findings, and discussion around two primary questions:
Why do MPOs not include self-driving cars in their long-range plans or do more to plan for self-driving cars?
How are large MPOs starting to plan for self-driving cars?
Large MPOs have both the staff and the mandate to consider the implications of driverless cars. For example, Philadelphia’s MPO has almost one hundred planners on staff while Seattle’s has about seventy-five (Delaware Valley Regional Planning Commission 2015; Puget Sound Regional Council 2015). And federal law (U.S. Code Title 23 Chapter 1 § 134 - Metropolitan Transportation Planning 2014) requires that MPOs develop long-range regional transportation plans (commonly referred to by the acronyms RTP or LRTP) with a minimum planning horizon of twenty years and update them every four years for regions with more than fifty thousand residents. Required to be performance-driven and outcome-oriented, these plans set regional priorities and guide regional transportation investments to achieve national goals related to safety, infrastructure condition, congestion, and system reliability. For better or worse, autonomous vehicles will almost certainly influence these and other national goals within this minimum planning horizon. Yet only one of the twenty-five largest MPOs even mentions driverless, automated, or autonomous vehicles in its most recent RTP.
In addition to providing the first systematic review of how a group of proactive planners are considering self-driving cars, the article documents the state of best planning practice and illuminates some of the challenges of preparing for transformative technological shifts. It also demonstrates some of the limitations of the RTP process and raises questions about whether and how planners could do more to prepare for a fast-approaching and potentially transformative new technology.
What Are Self-Driving Cars?
Engineers and futurists have long envisioned the potential for and benefits of self-driving vehicles (Beiker 2014; Shladover 1998). A 1957 advertisement showing a family playing dominoes while their car moves itself smoothly along the highway graces the cover of a RAND policy report (Anderson et al. 2014) on self-driving cars (Figure 2). Only recently, however, has the confluence of rapid improvements in computer processing, satellite positioning, and laser sensing made this long-held dream a potential reality. Current prototypes rely on the Global Positioning System (GPS), cameras, and other sensors, particularly LIDAR (like RADAR but with lasers instead of radio), to detect a vehicle’s location and the location of surrounding vehicles, people, and obstacles to remain safely in the center of a highway lane or move around on city streets.
Advertisement of family playing dominoes in an electric-powered self-driving car (America’s Independent Electric Light and Power Companies, art by H. Miller).
Between zero and full autonomy is a range of functional controls such as adaptive center-lane cruise control, which can take over the driving task on highways but requires the driver to remain attentive and ready to take over the task of driving at short notice. The U.S. Department of Transportation’s National Highway Traffic Safety Administration (NHTSA) defines five levels of automation ranging from Level 0 to Level 4—which refer respectively to a human-controlled car and a fully self-driving car (U.S. Department of Transportation 2013a). A separate, but intimately related, technology (and one frequently discussed throughout interviews with MPO planners) is that of connected vehicles, which communicate wirelessly with other vehicles or infrastructure. 1
Throughout this study, I refer to autonomous, automated, driverless, and self-driving vehicles interchangeably, but treat connected vehicles separately. Connected vehicles may help improve vehicle automation and have similar road safety and capacity impacts, but do not have the same potential to transform the transportation system by replacing drivers altogether.
Research Design
In March and April 2014, I collected and reviewed the most recent RTPs from the twenty-five most populous metropolitan areas in the United States (as of July 1, 2013). Altogether, 130 million people—roughly 40 percent of the nation’s population—live within these regions. I searched the RTPs for variations on phrases like “self-driving,” “connected vehicles,” “autonomous,” “automated,” and “technology.” If the document mentioned self-driving, connected, or autonomous vehicles, I summarized how and where this fit within the regional plan, as well as principal priorities and other trends and technologies mentioned in the plan.
I then contacted staff members from the twenty-five MPOs and conducted in-depth, semistructured interviews with representatives of fifteen of them (a 60 percent response rate). I conducted two interviews in person, with the remaining thirteen over the phone. Another two MPOs provided written feedback to questions (for a total response rate of 68 percent), but these did not provide the same level of detail or nuance as the interviews and are largely excluded from the reported findings (Appendix A).
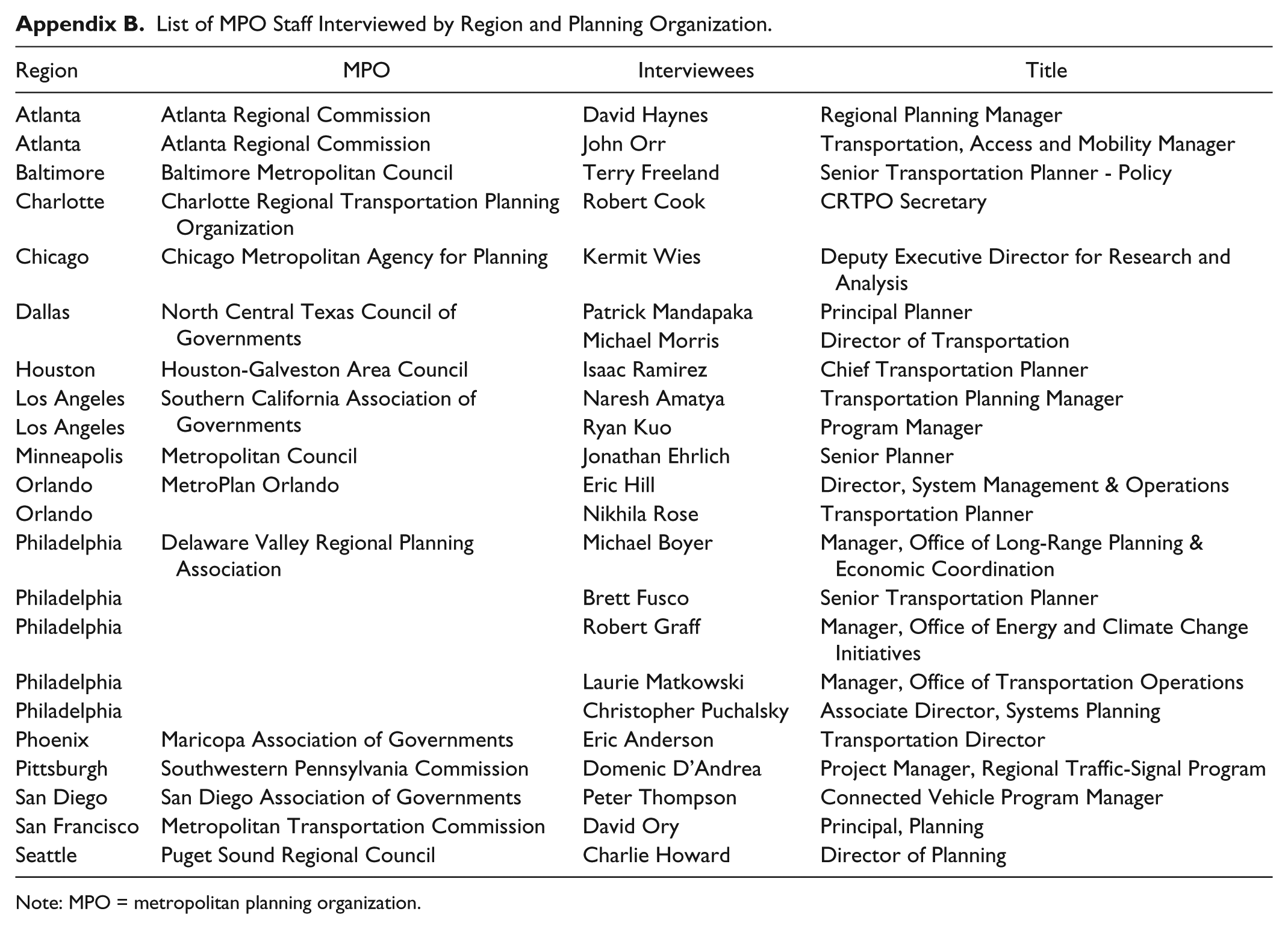
I initially emailed any person listed as a contact on the RTP, the head of transportation planning, and/or the head of long-range planning to request an interview. Contacted staff members often forwarded the request to other MPO employees, whom they thought better suited to the interview. Interviews took place between May and September 2014, ranged from 40 to 80 minutes, and included one to five participants. Interviewees included senior planners, senior management, and project managers in transportation planning, long-range planning, modeling, research, and Intelligent Transportation Systems (Appendix B).
After reviewing the RTPs and discussing the findings with local MPO staff members, I developed interview questions around three hypotheses about why MPO planners have not incorporated autonomous vehicles into their RTPs:
Planners are either unaware of the new technologies or do not believe their impacts will be profound;
The impacts are not yet certain enough for credible planning efforts; and
The impacts are too far removed from day-to-day policy and investment decisions.
I also asked planners direct, open-ended questions about why they did or did not mention self-driving cars in the RTP and what future plans, if any, they had for incorporating self-driving cars into their planning efforts. Interviewees also discussed other mechanisms through which their MPO has considered the impacts of self-driving cars, probable MPO responses to a series of predicted impacts of self-driving cars, and the knowledge-gaps that must be filled for planners to incorporate autonomous vehicles into long-range planning efforts and investment decisions.
Interviewees indicated sensitive material throughout the interviews and in two cases requested that I stop recording toward the end of the session. In order to maintain anonymity and consistency throughout the text, I opt not to present the names of any interviewees in the body of the paper. For the section on contemporary planning practices, the interested reader can match the names of the organizations with the names of the interviewees in Appendix B.
Sample Selection
Several considerations influenced the selection of MPOs in these regions. First, MPOs are federally mandated to develop and update long-range plans every four years. This makes them more likely to consider long-range trends than cities or municipalities, which are more focused on day-to-day operations and project implementation. Second, the largest metropolitan areas tend to have the largest, most technically savvy MPO staffs that are most likely to have the resources to incorporate self-driving cars into planning efforts. If these MPOs are not planning for self-driving cars, smaller MPOs are unlikely to be doing so. Third, including the top twenty-five regions gives a much more nationally representative cross section of U.S. metropolitan areas than a smaller sample. The top twenty-five includes large coastal metropolises as well as many of the fast-growing smaller cities of the Sunbelt and several older, slow-growing Midwestern regions. It also includes a far greater range of politically liberal and conservative regions than a top-ten or top-five list. Finally, although the number of regions is small, their importance is great. Forty percent of the country lives within them and is directly affected by their MPOs’ plans and investment decisions.
While this sample selection provides a convenient way to identify best proactive planning practices with a limited number of interviews, smaller MPOs’ reasons for not including self-driving cars in their plans and current planning practices should not be inferred from the sample. However, sampling from the agencies that are most likely to plan does allow for some generalizations about non-planning and the challenges of planning for self-driving cars. Extreme or critical sample selection is often used to generalize from a single case study (Yin 2008, chap. 2; Flyvbjerg 2006). If the interview sample (fifteen of the twenty-five MPOs contacted) is further biased, it is likely biased in the intended direction: Staff from MPOs that are actively planning for and considering self-driving cars were probably more likely to agree to an interview than staff from MPOs that were not.
Self-Driving Cars and the Long-Range Plan
None of the MPOs most likely to be planning for self-driving cars have incorporated them into their most recent RTPs. 2 Of the twenty-five largest MPOs, only Philadelphia’s Delaware Valley Regional Planning Commission mentions autonomous vehicles at all. In a brief sidebar, the plan identifies the rapid advancement of new technologies like driverless cars and uncertainty about their timing and impacts as a reason for regular RTP updates (Delaware Valley Regional Planning Commission 2013). Since federal law requires regular updates to qualify for federal transportation funds, the text reads more like a response to staff and stakeholders’ planning-fatigue than a call to prepare for a transformative, but uncertain technology. The San Diego Association of Governments (2011) dedicates a section of its RTP to connected vehicles (the only plan that does), but does not mention autonomous vehicles.
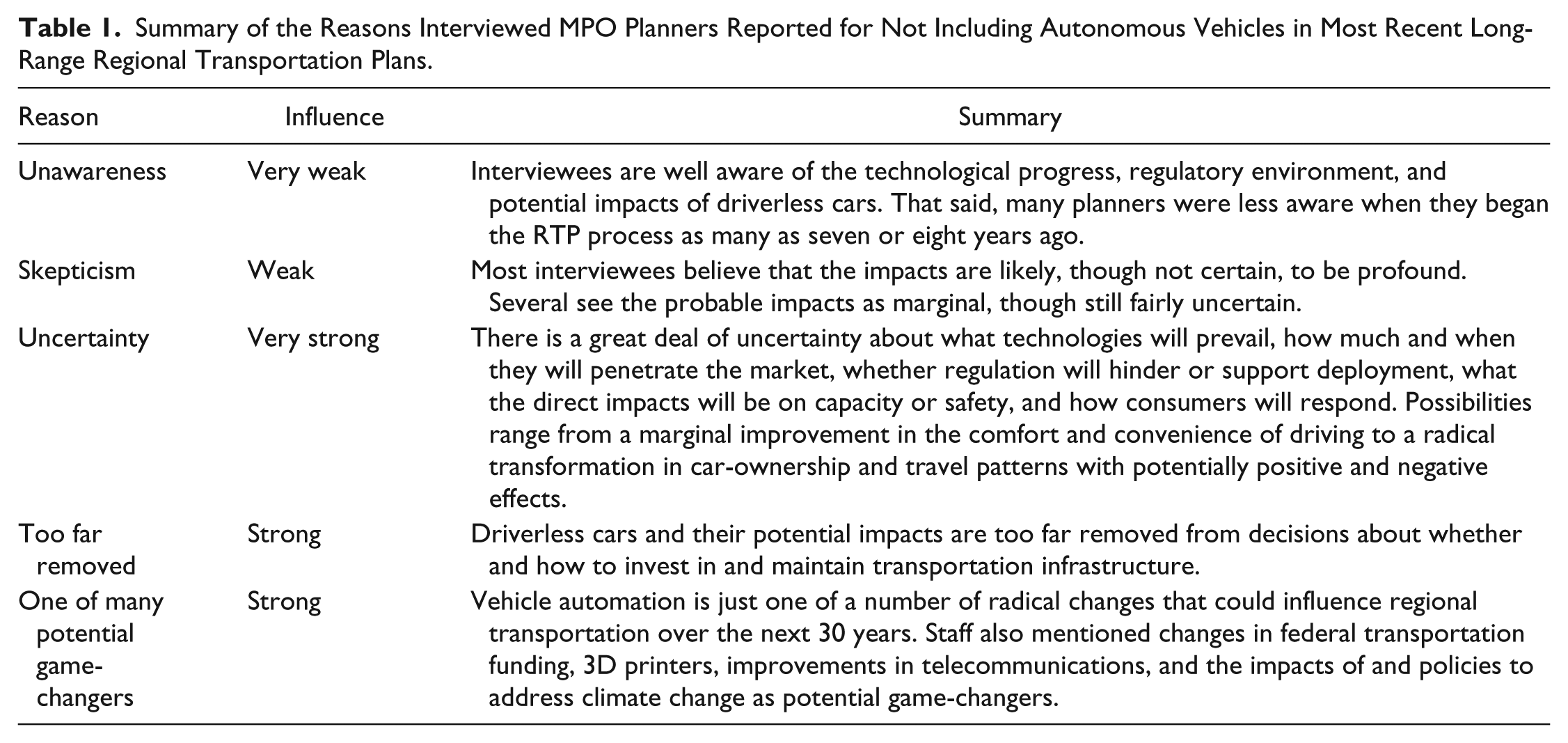
Table 1 summarizes five principal reasons why interviewees indicated that their MPOs have not incorporated driverless cars into long-range plans. While uncertainty about the timing and impacts of driverless cars plays the strongest role, the divide between the emerging technology’s potential impacts and the way that investment decisions are made featured prominently in most interviews. Unawareness and skepticism played only a weak role, though planners were less aware and more skeptical just several years ago; a testament to the rapid pace of technological change. The remainder of this section describes each entry of the summary table in greater detail. It bears repeating that the interviewees are among the planners most likely to consider and plan for self-driving cars. Smaller MPOs have more limited planning capacity and may be less aware of emerging technologies and less likely to view planning for emerging trends within their mandate.
Summary of the Reasons Interviewed MPO Planners Reported for Not Including Autonomous Vehicles in Most Recent Long-Range Regional Transportation Plans.
Awareness of Driverless Vehicle Technologies
Although no MPO incorporated driverless cars into its RTP, most interviewees are well aware of the latest developments in automated vehicle technologies, legislation, and research. Throughout the interviews, they frequently used technical jargon like Level 0 and Level 4—referring to zero and full autonomy—and V2V and V2I—acronyms referring to vehicle-to-vehicle and vehicle-to-infrastructure telecommunication. Interviewees also referred to recent newspaper articles, conference sessions, web videos, and academic publications on self-driving cars. Many not only attend but organize national and local meetings and conference sessions on autonomous vehicles. A few have started to develop regional transportation models to help predict the impacts of self-driving cars. In short, many are following the technology closely and have intimate knowledge about the current state, likely near-future, and potential impacts of autonomous vehicles.
Despite this current level of awareness, planners update regional transportation plans every four years, meaning that the start of the planning process for an existing plan could have begun as many as eight years prior to most recent official plan. Given the rapid changes in the development of self-driving cars, levels of awareness were much lower in the recent past. A few planners mentioned that self-driving cars had only come onto their radar in the past couple of years.
Impacts Likely within a Long-Range Planning Horizon
Most interviewees indicated that self-driving cars will likely have significant impacts on travel behavior, safety, car-ownership, infrastructure, land-use, and settlement patterns. Citing the recent work of Google and major car manufacturers, one self-described technology skeptic indicated a belief that self-driving cars would be transformative in the near term. Even planners who expected change to be slow and marginal agreed that driverless cars had the potential to be rapidly transformative, particularly if encouraged by federal policies as happened with seatbelts, air bags, fuel efficiency, and safety glass. Most had a sense that self-driving technologies would be available and mass-marketed within the next twenty years, but that policy, regulation, and price would all influence market penetration and thus any effect on road capacity or traffic safety.
Furthermore, planners were generally cautious about specific predictions. Rather, they described a range of possible outcomes in terms of how and when automated-vehicle technologies are deployed and how the public responds. To temper statements about likely impacts, one regional planner cautioned, “We used to predict colonies on the moon.” Nevertheless, most MPO staff members are best described as cautiously optimistic, rather than skeptical, that driverless cars will eventually produce significant road-capacity and safety improvements.
Uncertainty about Timing and Scale of Impacts
Despite this cautious optimism, the direct and indirect impacts of self-driving cars are highly uncertain. This uncertainty featured heavily in all fifteen interviews. As one planner who has spent time coordinating conference sessions on autonomous vehicles summed up the planning experience, “Yes, there’s a discussion [about incorporating autonomous vehicles into planning efforts at our MPO]. We don’t know what the hell to do about it. It’s like pondering the imponderable.”
In addition to a wide range of outcomes—from just another marginal improvement in the comfort and safety of driving to a profound shift in travel behavior and the transportation system—the direction of impacts remains uncertain. For example, self-driving cars could increase vehicle miles traveled (VMT) by generally lowering the time-costs of travel and parking and by giving increased mobility to children, the elderly, the blind, and others restricted from operating vehicles. On the other hand, driverless cars could reduce VMT by enabling substantially more car-sharing, better transit, and a shift from paying for vehicles and insurance in lump sums to paying for each trip or mile driven. Most interviewees saw significantly higher and significantly lower VMT as potential outcomes. Some, however, thought both outcomes were somewhat overblown. One planner stated, “I guess I’m slightly pessimistic about the transformative impacts of [driverless cars] and I think slowly cars will be more and more comfortable to drive.”
Some regional planners spoke at length about attracting new tech jobs related to driverless cars, while others worried about unemployed truck and taxi drivers. This split mirrors the split in a recent Pew poll of experts on whether new technologies, including driverless cars, will create more jobs than they replace (Smith and Anderson 2014).
In terms of transit, interviewees also had divided views on the impacts of driverless vehicles. Several expressed concern that they were investing in expensive rail projects that might soon become obsolete if autonomous vehicles greatly influence effective road-capacity or travel behavior. One worried that “If you basically have your own personal rapid transit vehicle . . . it could draw [choice riders] away from transit and back into a personal vehicle.” Others saw an opportunity to improve bus service and last-mile transit provision with autonomous vehicles. One planner noted that “autonomous subways are easy, in that we’ve had them for 20 years. But if we can have autonomous buses, then that really changes the cost of providing service and service frequency . . . and we can have smaller vehicles and higher frequencies.”
While planners from one agency thought that new, automated technologies would reinforce the much-reported (and much-disputed) Millennial generation’s move away from car-ownership and toward transit use and urban lifestyles (for a discussion of Millenials’ preferences, see Blumenberg et al. 2012), planners from two other agencies predicted the opposite effect. They felt that if driverless cars provided the freedom to operate mobile devices while in the car, then younger, wealthier transit riders would switch to using cars. Another planner identified both of these outcomes as possible. Similarly, driverless cars could encourage sprawl by reducing the burden of travel but could also encourage infill and dense development by reducing the need for parking and the inconvenience of looking for parking in dense residential neighborhoods.
Planners acknowledged that there are doubtless uncertainties that they have not considered at all. There may be unintended consequences or totally unexpected behavioral responses to the new technology. Wondering about how far the future might deviate from all of the many impacts under consideration, one planner joked: “I don’t want to hear this [interview recording] in 20 years.” Four different interviewees brought up texting while driving as an unintended consequence of a new technology that few predicted. Several fretted about personal privacy and the potential danger of hacked driverless cars. Technology has already been used to either crash or hijack military drones (Peterson and Faramarzi 2011) and cause contemporary cars to behave erratically (Greenberg 2013). The hacking of private vehicles for theft, mischief, or assault is a serious potential risk and a roadblock to deploying self-driving cars.
Disconnect from Regional Investment Decisions
Partly as a result of these uncertainties, planners stated that driverless cars remain far removed from the types of day-to-day investments and policy decisions that long-range planning supports and justifies. MPOs have a legal responsibility to develop fiscally constrained plans based on credible and consistent data to meet specified targets. These plans tend to be conservative and interviewees consistently stated that there is insufficient evidence to justify projections of driverless cars’ influence on congestion, collisions, or fatalities. 3 In addition to the threat of losing federal funding, plans can be the basis for lawsuits related to environmental impacts and air quality conformity. (For an in-depth discussion about air quality and regional transportation planning in the San Francisco Bay Area, see Garrett and Wachs 1996.) One planner indicated that a recent lawsuit had made the agency even more conservative and less likely to discuss the impacts of new technologies.
Interviewees routinely described the long-range planning process as reactive and, as one planner lamented, they tend to plan in the rear-view mirror. Another stated, “A lot of times our planning processes are more reactionary [sic] than anticipatory.” However, one planner embraced this reactive nature, stating that the job of long-range planning is not to predict the market, but to enable it: “My job is to explore the planning and policy capabilities so that when the private sector’s ready, we’re an enabler and not an inhibitor.” In any case, unless an MPO sets aside money for specific projects related to driverless cars, planners will only tend to address driverless cars in general terms as a potentially impactful technology. This tension between predicting the future and planning in the present is by no means new to the planning field nor exclusive to discussions about uncertain new technologies (see, e.g., Altshuler 1965; Myers and Kitsuse 2000; Quay 2010; Hamin, Gurran, and Emlinger 2014).
Furthermore, planners do not wish to make bad investment decisions based on uncertain technologies. Spending millions of dollars on smart infrastructure is potentially wasteful, and no government agency wants to risk betting on a technology that flops. One planner expressed that a shift to in-vehicle technologies (like sensors and short-range vehicle-to-vehicle wireless communications) has been a blessing because it has insulated public agencies from the risks associated with investing in new infrastructure like fiber-optic cables along highways. Nevertheless, planners recognize that there are risks associated with continuing to conduct business as usual. In particular, many worry that planned highway and rail investments could be obsolete by the time that they open, if autonomous vehicles greatly influence effective road-capacity or travel behavior. One said that “the last [thing] you want to have is 10, 15, 20 years down the road is highway investment projects that become increasingly less effective or irrelevant.”
Changing the portfolio of planned investments, however, is politically difficult. As many interviewees noted, planned projects have constituents who are loath to see them abandoned. One planner described the local planning process as conformity-driven, rather than planning- or needs-driven: “Traditionally, one of the things that we’ve done here in this region with our RTPs is that we’ve really treated them more as vehicles for achieving conformity so that the money can continue to flow.” The state and local actors develop a list of investments and the MPO produces plans in accordance. This is almost certainly the case for smaller MPOs, where the RTP is more about federal compliance than regional planning.
Even in regions with more empowered MPOs, planners stated that it can be extremely difficult to remove a planned project from the existing pipeline. The MPO’s role is generally to compare and evaluate investment proposals from stakeholders, not to make proposals. One interviewee likened MPO staff to a “lunchroom monitor,” who makes sure that cities and towns play nice and work together to agree on regional priorities and spending plans. Discussing regional transportation investment decisions, another noted that “there is a political economy that in many cases appears to override questions of efficiency or responsible stewardship of tax dollars.”
One of Many Potentially Impactful Changes
Finally, in addition to having uncertain impacts that are disconnected from daily investment decisions, self-driving cars are just one of many technologies and political changes that may disrupt regional transportation systems over the next several decades. Interviewees mentioned changes in federal funding for regional transportation, climate change, natural disasters, and other new technologies as having uncertain and potentially significant impacts on regional transportation systems. Developments in high-quality video conferencing, for example, could radically reduce the need for business travel. Drone-delivered freight is looking more and more possible. One interviewee described how 3D printing could alter global freight flows, potentially affecting a recent regional port investment.
One planner summarized the relative importance of autonomous vehicles: “Right now, it’s one of several forces that we think are going to be a potential game-changer that we need to take a closer look at. We’re just not at the point now where we can start saying, okay these are the four most important.” In the Philadelphia region, where MPO planners are developing a set of scenarios to consider potentially high-impact changes in the coming years, automated vehicles are just one of 32 under consideration (Delaware Valley Regional Planning Commission 2014).
Planning for Self-Driving Cars
Although only one of the twenty-five largest MPOs even mentions driverless car technologies in its most recent RTP, all but a couple of interviewees described one or more planning-related activities, such as focus groups or meetings with experts, to discuss the technological progress and implications of self-driving cars. Interviewees not only attend local and national meetings and conferences about vehicle automation, they also organize them. Several interviewees moderated and attended recent sessions like the Automated Transportation and Impacts to Planning session at the 2014 meeting of the Association of Metropolitan Planning Organizations in Atlanta and a breakout session on planning at the 2015 Automated Vehicles Symposium in Ann Arbor.
This section documents how a subset of regional planners are beginning to consider self-driving cars by developing planning scenarios, modeling travel behavior, testing new transportation technologies (though not yet autonomous vehicles), and considering changes to regional investment priorities. In addition to demonstrating the state of best metropolitan planning practice, this section illustrates some of the challenges of preparing for driverless cars. These challenges almost certainly extend to smaller MPOs, which have smaller staffs and more constrained planning activities.
Developing Scenarios
Given the uncertainties around the impacts of driverless cars, several agencies have opted to incorporate the technology into scenario planning efforts. For example, the Philadelphia MPO looked at autonomous vehicles as one of six driving forces of regional change and considered a number of potential impacts on capacity, safety, and travel behavior (Delaware Valley Regional Planning Commission 2014). Interviewees also indicated that they are examining the potential impacts of self-driving cars with regional SWOT (strengths, weaknesses, opportunities, and threats) analyses, regional operations plans, or organized brainstorming sessions with local universities, industry leaders, and government officials. Planners indicated that they tend to consider autonomous vehicles in concert with other changing technologies like connected vehicles, smart infrastructure, and improved teleconferencing. They also indicated that new technologies are just one planning consideration among others like climate change impacts and decreased federal transportation funding. While these efforts have helped agencies to consider a range of potential outcomes, they have—as one planner put it—led to more questions than answers about the future impacts of self-driving cars.
Modeling Impacts
Modeling regional travel behavior is one of the primary roles and responsibilities of MPOs. Most interviewees indicated that the behavioral responses to autonomous vehicles would be extremely difficult to predict. As one put it, “One of the bigger challenges we have is [to predict] how will autonomous vehicles change travel behavior, and I have no idea.” Nevertheless, the San Francisco, Seattle, and Atlanta regions have begun to test different scenarios involving driverless cars with their regional activity-based travel models. In a recent conference paper, the Puget Sound Regional Council’s modelers summarize the current state of modeling: “These scenarios clearly stretch current model capabilities, and depend on highly uncertain inputs. However, it is still useful to test the existing models in order to start a conversation with planners and decision-makers, as well as to highlight shortcomings in our existing methods to modelers” (Childress et al. 2015, 2).
Most modeling scenarios from the three regions have produced somewhat similar predictions, with 5 to 20 percent increases in regional VMT and associated decreases in nonmotorized modes and public transportation. Table 2 summarizes the scenarios from each region and their predicted influence on regional VMT. In most scenarios, autonomous vehicles influence VMT by making it less burdensome to drive (since passengers can sleep or work in the vehicle), increasing road capacity, and reducing parking costs.
Summary of Autonomous Vehicle Modeling Scenarios from Interviewed MPOs.

Note: MPO = metropolitan planning organization; VMT = vehicle miles traveled.
The only scenario that predicts lower VMT includes a per-mile vehicle charge of $1.65 (the equivalent of $33 at the pump for a car that gets 20 miles per gallon and close to the price of a taxi) and zero car-ownership. Given the low current taxi mode share, this alternative scenario seems unlikely. Nevertheless, it is an attempt to capture a future scenario in which autonomous vehicles lead to a revolution in car ownership, decreased driving, and increased walking and transit ridership using an existing model. Furthermore, the predicted effects of increased road capacity on VMT are also much lower than might be expected. It is unlikely that doubling effective road capacity would only increase VMT by 2 to 12 percent. 4 Existing empirical studies suggest that a 1 percent increase in highway capacity leads to an increase in VMT somewhere between 0.6 and 1 percent (Cervero and Hansen 2002; Cervero 2003; Duranton and Turner 2011).
However, travel models rely on observed trends and are conservative by nature. As one MPO modeler explained, “If the taxi mode share is zero and [autonomous taxis] save on labor, my first approximation of the automated taxi mode share would also be zero.” Without radical changes to the modeling assumptions, existing models are unlikely to predict radical responses to driverless cars. This may reflect a behavioral reality, but probably also a limitation of ongoing attempts to predict behavioral responses to self-driving cars.
Testing New Technologies
At present, MPO planners are not significantly involved in automated vehicle testing, which happens on closed facilities or unsupervised public rights-of-way in the states that allow testing. 5 At least two regions have test beds where they are starting to analyze the impacts of other new transportation technologies, such as vehicle-to-infrastructure communications. In Pittsburgh, MPO planners are working with the State DOT and researchers from Carnegie Mellon to install and test vehicle sensors and a high-tech traffic signal system that will provide additional information about the potential benefits of automating more transportation functions. The San Diego Association of Governments, which unlike most other MPOs builds and operates regional Intelligent Transportation Systems (a somewhat catch-all term for information and communications technologies applied to transportation), has used managed lanes to test wireless vehicle communications since 1998 and is continuing to test vehicle-to-vehicle and vehicle-to-infrastructure technologies.
Only one regional planner discussed testing autonomous vehicle technologies at any length. In Dallas, the MPO’s Director of Transportation expects that private sector firms, particularly trucking companies, and local universities will begin to submit requests to test driverless technologies on a new barrier-separated thirty-mile test corridor that runs down the middle of I-30 between Dallas and Arlington. He described the MPO’s role as being able to support and facilitate these types of requests, rather than develop its own tests or pilot projects. MPOs will only likely get significantly involved in testing driverless cars if testing involves a large regional infrastructure investment or uses an existing regional test facility.
Changing Spending Priorities
To date, the prospect of autonomous vehicles has had little to no influence on MPOs’ investment decisions. Nevertheless, one MPO used the potential capacity improvements from autonomous vehicles to help justify the demotion of a regional road expansion from a funding priority to a regionally desired project. This may seem like a subtle semantic difference, but it likely prevents the project from ever being built. However, interviewees said that this same decision would likely have been made without considering self-driving cars. At the request of a stakeholder city, another MPO is trying to analyze whether the advent of self-driving cars means that the region should continue with plans to build managed lanes. Several interviewees worried that a number of currently planned investments might be unnecessary if driverless cars increase effective roadway capacity.
As research, pilot projects, and modeling efforts provide more information on the probable impacts of self-driving cars, interviewees indicated that investment portfolios will likely begin to change at the margin. Staff from several MPOs used the same analogy of moving a large ship by a few degrees. Most thought that by increasing effective road capacity, driverless cars would encourage a shift away from spending on regional highway expansion. Many also hoped that driverless cars would help them reduce capital expenditures in an increasingly funding-constrained planning environment.
In terms of the safety impacts of driverless cars, planners indicated that automation might become an important component of setting and meeting required safety targets. Improving safety is an increasingly important component of national transportation policy and MPOs are responsible for setting and meeting regional safety objectives. As with seatbelts and airbags, certain automated or connected-vehicle features will almost certainly be required, if safety benefits are significant and the technology is modestly priced. To the extent that these features are vehicle-based, MPOs will have a limited role in implementing or requiring them. If, by contrast, they require significant infrastructure investments, MPOs will take a lead role in planning and investing in new safety-related technologies. 6
Summary and Policy Recommendations
I began this article with an assertion that the planning profession has a history of failing to prepare for new transportation technologies because of misunderstanding the technologies and focusing on the planning issues of the day rather than the planning issues of the future. A review of the RTPs of the nation’s twenty-five largest metropolitan areas finds that none has incorporated self-driving cars and only one mentions the new technology. This is almost certainly not because the planners are unaware or skeptical about self-driving cars. Instead, uncertainty about autonomous vehicles’ impacts and timing and the gap between potential impacts and day-to-day investment decisions are the principal reasons that self-driving cars do not feature in RTPs. Since these twenty-five MPOs are among the most likely to be planning for self-driving cars, smaller MPOs are unlikely to have done more. This section summarizes how well prepared planners are for self-driving cars, briefly discusses how future plans are likely to address them, and concludes with a question about the value of planning for self-driving cars and three policy recommendations.
Planners from some (though certainly not all) of the largest MPOs are at the forefront of planning for self-driving cars. They attend, host, and organize conferences and focus groups on new transportation technologies and their implications for cities, regions, and transportation systems. Three regions—Atlanta, San Francisco, and Seattle—have produced some of the first and most advanced models to predict how autonomous vehicles might affect travel behavior and the regional transportation system. Others, like Pittsburgh and San Diego, are involved in testing new transportation technologies, though the focus has been on connected, rather than autonomous, vehicles.
Despite these thoughtful planning efforts, large MPO planners (and by extension most other planners) are unsure how to plan for self-driving cars. Interviewees generally felt that existing research does not yet provide sufficient, actionable information to direct investments or planning priorities. Asked what type of knowledge is required, most expressed a range of needs including knowledge about the impacts on capacity, traffic safety, land use, and travel behavior. In short, although planners follow existing research and develop modeling and other scenarios, most do not see the findings as sufficiently concrete or certain. Several described a need for robust pilot projects before new technologies can start to have an impact on regional investments. Unfortunately, the extent and direction self-driving cars’ impacts, particularly if transformative, are unlikely to be fully understood until they have already started to happen.
Nevertheless, MPOs are also more likely to discuss self-driving cars in their next plans than the previous ones. Instead of making concrete projections or investment decisions, the RTPs will include autonomous vehicles as one of a number of potentially transformative technological and social changes that will have uncertain impacts. To quote one planner, “My guess is that if you did a word search [on the next RTP], you would find [driverless cars], but more than likely it would be used as an example for setting the framework for changes in technology that infrastructure development need to be aware of.”
As more information becomes available about the likely timing and impacts of self-driving cars, MPOs are likely to respond by reducing investments in highway expansion and shifting more of their budgets from capital investments to operations. However, three factors will likely temper the influence of self-driving cars—even if transformative—on roadway investments in large metropolitan regions. First, interviewees indicated that they already spend the majority of their budgets on operations; in older regions this is as high as 90 percent of the budget. Second, most interviewees stated that their organizations are spending an increasing share of remaining investment dollars on transit and nonmotorized modes instead of highways. None expected self-driving cars to change this trajectory. Third and perhaps most importantly, planning and analysis play a constrained role in project selection and once an investment has been selected, it is difficult to remove from the pipeline of regional projects.
The first two reasons likely do not extend to smaller MPOs outside of the interview sample. Nationally, the total and federal share of transportation expenditures on highway capital investments increased modestly from 1995 to 2012 (Bureau of Transportation Statistics 2014, n. Table 21-A & 22-A). And interviewees indicated that driverless cars have a much greater potential to change investment priorities in smaller, faster-growing regions than older ones. An interviewee from one such region stated, “We’re still rapidly growing and we’ve put a lot of roadway infrastructure down in the last 25 years. If you look forward over the next 25 years with the prospect of autonomous vehicles . . . it’s gonna reduce the need for additional capacity in the future.” Another, from a larger but still rapidly growing Sunbelt region, stated, “We have a million people coming every decade for the last four decades and for the next three, so [increases in capacity] would reduce the size, ugliness, and the number of corridors [on our highway system].” Even in older regions, many highways are reaching the end of their service life and will need major repairs or replacement. Improvements in effective road-capacity due to autonomous vehicles could influence how these regions choose to rebuild.
Policy Recommendations
Should planners be doing more to prepare for self-driving cars? On the one hand, the timing, scale, and direction of the impacts are uncertain and the opportunities to influence investment decisions are limited. Furthermore, planners will likely have time to adjust and modify plans as the impacts of autonomous vehicles become more reliably estimable—new technologies are expensive and the average passenger car is more than 11 years old (U.S. Department of Transportation 2013b). Even if transformative, the fleet will take at least a decade to incorporate significant numbers of driverless cars. On the other hand, the new technology will almost certainly impact regional travel behavior and transportation systems within the time frame of contemporary long-range plans. Even with modest market penetration, these impacts could be significant. The freight, taxi, and transit industries, in particular, could change rapidly and radically, with significant metropolitan impacts.
Large MPO planners recognize these challenges and—although they would generally like to do more to plan for self-driving cars—are cautious about making unsubstantiated projections or premature investment decisions. Not only is it difficult to predict when and how the technology will arrive and what its impacts will be, planners have a limited role in directing investment priorities. Furthermore, there are many other regional priorities and changing technological, environmental, and social trends to consider. Despite some uncertainty about whether and when to plan in earnest for autonomous vehicles, I conclude this paper with three recommendations for and based on contemporary long-range planning efforts for self-driving cars.
1. Beware the rosy future
Like the mass-produced automobile or limited-access highway, driverless cars will almost certainly create, as well as resolve, a number of planning problems. Planners should be careful not to expect self-driving cars to solve congestion, traffic accidents, or pollution problems. Early models predict that self-driving cars are likely to increase vehicle travel modestly. If unoccupied vehicles circle indefinitely for free parking and run errands, any safety and congestion benefits may be substantially or entirely offset. Some planners worry about large shifts from walking, biking, and transit to self-driving cars. There are also significant potential land use and equity implications.
While most interviewees emphasized the importance of considering negative impacts, several painted an overly rosy picture of the future of self-driving cars. These interviewees tended to conflate driverless cars with electric vehicles, slower more fuel-efficient travel speeds, and a form of ubiquitous, personal rapid transit. Most, however, advised caution and conservativism when predicting self-driving cars’ ability to improve air quality, congestion, or traffic collisions. One interviewee stressed the importance of asking, “What possible things could this bring about that we aren’t considering and are going to be the planning problem of tomorrow?” Another emphasized that “There are always unintended consequences.” This level of caution is appropriate, given the technological, regulatory, and behavioral uncertainties related to autonomous vehicles.
2. Plan outside the RTP (or other rigid planning processes)
The RTP process is too constrained to plan for an uncertain, but potentially transformative, technology like self-driving cars. All MPOs, regardless of size or geography, need to develop and regularly update the RTP, based on a set of regional targets and quantifiable and observable trends. Failure to meet the requirements of the RTP can result in the withholding of federal transportation funds. This type of planning may have worked well during the interstate highway program, when VMT rose nationally at a fairly steady rate, but is not well suited to changing trends or radical transformations. Several interviewees indicated that these requirements made plans conformity-driven and more about the recent past than the future.
In order to plan for self-driving cars, planners need to go beyond conformity-driven processes like the RTP, to test and evaluate a range of potential outcomes. This will not be an issue for the largest MPOs, which already engage in wide-ranging planning activities (mostly unrelated to autonomous vehicles) that go well beyond the requirements of the RTP. Smaller MPOs, however, will struggle to develop robust models or scenarios. Many only have a single transportation planner or engineer on staff and focus on conformity by necessity.
If planning for driverless cars is indeed a desirable goal, then smaller MPOs will need federal guidance and some easy-to-implement rules of thumb. Early modeling and scenario-planning efforts of the largest MPOs suggest that self-driving cars will not fit neatly into long-range trend projections. Instead, a range of outcomes should be considered. Given limited resources, planners interested in considering the impacts of self-driving cars could consider two potential outcomes: one where driving rates, effective road capacity, and travel increase substantially and another where shared autonomous taxis replace private cars and public buses, particularly in more urban areas. While neither scenario will necessarily make it into the RTP, plans that consider both scenarios will be more robust to many of the uncertain impacts of self-driving cars.
3. Consider investment risks
Given the state of existing knowledge and uncertainty about impacts, considerations of vehicle automation should play a limited and complementary role in decision making. At this stage, it simply does not make sense to fund or not fund investments based on an uncertain future technology that will have uncertain, though potentially transformative, impacts. As two planners concluded, finishing each other’s sentences: “It’s not entirely actionable at this point. We can shift direction a few degrees to the left or right, but we can’t start to really turn the boat yet, and certainly not stake specific investments on [autonomous vehicles], and [deciding between investments], at the end of the day, is certainly what we’re trying to do with the [long-range] plan.” Similar to planning for the uncertainties of climate change, planners could nevertheless consider the robustness of investment decisions to a range of potential autonomous vehicle scenarios.
For example, new investments in suburban rail or highway expansion will tend to perform less well when considering the range of impacts from driverless cars than when not considering them. Capacity expansions tend to take a long time to plan and build; and the longer the project horizon, the more likely that driverless cars will have altered travel behavior and the transportation system. Furthermore, driverless cars will probably have the biggest and earliest impacts on freeway capacity, where the task of automation is far simpler, and lower volume transit, where automated features could help buses provide more rail-like features, such as better on-time performance, higher frequencies, and faster average speeds.
By contrast, uncertainty about the timing and impacts of self-driving cars has almost no influence on whether to repair a road bridge. Bridge repairs will likely be completed in a shorter time frame than a capacity expansion. More importantly, the value of a repaired bridge is far less dependent on whether automation leads to a revolution in travel behavior or provides just another marginal improvement in the safety, comfort, and convenience of driving. Investments in bicycle and pedestrian infrastructure are also somewhat insulated from the risks associated with driverless car technologies. If the technology leads to a shared revolution in urban mobility, the nonmotorized mode share will likely increase and vehicles will need less space. If the technology leads to a marginal increase in the safety and comfort of driving, however, none of the original motivations to invest in bicycle or pedestrian facilities will have gone away.
Whatever the actual future impacts of self-driving cars, the potential impacts will almost certainly be used to argue for and against an array of investments and investment types. In St. Petersburg, FL, opponents have already used the promise of self-driving cars to help defeat a public referendum to fund a light-rail investment and expand bus service (Morris 2014). As new technological breakthroughs occur, more automated features become commercially available, and public awareness about vehicle automation increases, self-driving cars will have an increasing influence on public discourse and investment decisions. By getting ahead of this discourse, planners will have a greater role in shaping how driverless cars influence regional transportation investments.
Footnotes
Appendix
List of MPO Staff Interviewed by Region and Planning Organization.
| Region | MPO | Interviewees | Title |
|---|---|---|---|
| Atlanta | Atlanta Regional Commission | David Haynes | Regional Planning Manager |
| Atlanta | Atlanta Regional Commission | John Orr | Transportation, Access and Mobility Manager |
| Baltimore | Baltimore Metropolitan Council | Terry Freeland | Senior Transportation Planner - Policy |
| Charlotte | Charlotte Regional Transportation Planning Organization | Robert Cook | CRTPO Secretary |
| Chicago | Chicago Metropolitan Agency for Planning | Kermit Wies | Deputy Executive Director for Research and Analysis |
| Dallas | North Central Texas Council of Governments | Patrick Mandapaka | Principal Planner |
| Michael Morris | Director of Transportation | ||
| Houston | Houston-Galveston Area Council | Isaac Ramirez | Chief Transportation Planner |
| Los Angeles | Southern California Association of Governments | Naresh Amatya | Transportation Planning Manager |
| Los Angeles | Ryan Kuo | Program Manager | |
| Minneapolis | Metropolitan Council | Jonathan Ehrlich | Senior Planner |
| Orlando | MetroPlan Orlando | Eric Hill | Director, System Management & Operations |
| Orlando | Nikhila Rose | Transportation Planner | |
| Philadelphia | Delaware Valley Regional Planning Association | Michael Boyer | Manager, Office of Long-Range Planning & Economic Coordination |
| Philadelphia | Brett Fusco | Senior Transportation Planner | |
| Philadelphia | Robert Graff | Manager, Office of Energy and Climate Change Initiatives | |
| Philadelphia | Laurie Matkowski | Manager, Office of Transportation Operations | |
| Philadelphia | Christopher Puchalsky | Associate Director, Systems Planning | |
| Phoenix | Maricopa Association of Governments | Eric Anderson | Transportation Director |
| Pittsburgh | Southwestern Pennsylvania Commission | Domenic D’Andrea | Project Manager, Regional Traffic-Signal Program |
| San Diego | San Diego Association of Governments | Peter Thompson | Connected Vehicle Program Manager |
| San Francisco | Metropolitan Transportation Commission | David Ory | Principal, Planning |
| Seattle | Puget Sound Regional Council | Charlie Howard | Director of Planning |
Note: MPO = metropolitan planning organization.
Acknowledgements
Karen Frick, Eric Morris, Megan Ryerson, Scott Smith, and three anonymous reviewers provided substantial and helpful suggestions to improve the original manuscript.
Declaration of Conflicting Interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Technologies for Safe and Efficient Transportation, a U.S. Department of Transportation University Research Center.