
Abstract
This paper is concerned with stabilization with energy decay rates of a class of second-order bilinear systems with time delay in a Hilbert space. We study strong and exponential stabilization with bilinear feedback controls. First, we rely on the cosine family to establish the well-posedness of the resulting closed-loop system. Then, we provide sufficient conditions under which the chosen control strategy achieves strong or exponential stabilization of the system. In addition, in the case of the strong stabilization, an explicit decay estimate is established. The obtained results are finally illustrated by wave and beam equations with simulation as applications.
Keywords
Introduction
Time delays play a critical role in various fields of engineering and science (Artstein, 1982; Fridman, 2014; Richard, 2003; Smith, 2011). They occur due to inherent delays in system components and the need for feedback controls to stabilize systems, which introduce inevitable delays. These delays can have a significant impact on system performance and stability. In the case of hyperbolic partial differential equation control systems, it has been well known for several years that even a small delay in the boundary or internal feedback could destabilize a system, which is uniformly asymptotically stable without delays (Datko, 1988; Datko et al., 1986; Nicaise & Pignotti, 2006).
In the context of second-order systems, extensive research has been dedicated over the years to the development of stabilizing controllers in the presence of time delay (Bayili et al., 2020; Hamidi et al., 2021; Komornik & Pignotti, 2022; Logemann et al., 1996; Nicaise & Pignotti, 2011; Nicaise et al., 2011; Paolucci & Pignotti, 2022; Pignotti, 2023; Rebarber & Townley, 1998; Xu et al., 2006) to name but a few.
For abstract evolution equations with delay, in Ait Benhassi et al. (2009) the authors study the feedback stabilization of second-order systems with time delay, where the delayed damping term is smaller than the undelayed one. Using Ammari and Tucsnak’s method (Ammari & Tucsnak, 2001), they reduced the exponential stability problem of a closed-loop system to an observability estimate for an uncontrolled system and a boundedness property of the transfer function. Moreover, the authors in Paolucci and Pignotti (2021) studied a class of semilinear wave-type equations with viscoelastic damping and delay feedback with time-variable coefficients. By combining semigroup arguments, careful energy estimates, and an iterative approach, they are able to prove, under suitable assumptions on the delay feedback coefficient and on the memory kernel, a well-posedness result and an exponential decay estimate for solutions corresponding to small initial data. This extends and concludes the analysis (Nicaise & Pignotti, 2015, 2018) and further developed in Komornik and Pignotti (2022) and Continelli and Pignotti (2023). In Paolucci (2022) the author study a nonlinear abstract evolution equation with an infinite number of time-dependent time delays and the exponential decay of the solution is proved.
In the specific context of boundary delayed feedback for wave-type equations, Gugat (2010) studied the stabilization of a vibrating string with constant delay. In particular, the author considered the case where the delay coincides with the intrinsic period of the uncontrolled system, namely
In this work, we consider the following second order system with time delay:





When

The stabilization problem for system (1.1) then consists in designing a feedback control



This motivates the following feedback law:



In this paper, we study the stabilization of the bilinear system (1.1) under the observability inequality for the corresponding uncontrolled system using the controls (1.8). Moreover, we obtain exponential and polynomial decay rates. This paper is organized as follows. In Section 2, we give some definitions and fundamental properties of a strongly continuous cosine family. In Section 3, we analyze the existence and uniqueness of the global mild solution of the resulting closed-loop system using the cosine family. Section 4 is devoted to the stabilization of system (1.1) together with an energy decay rate estimate. Finally, in Section 5, we provide some illustrating examples with simulations.
We start with a review of the essential background needed for this paper. In particular, we recall the definition and some fundamental properties of a strongly continuous cosine family, which are essential for our subsequent analysis.
A family
The corresponding strongly continuous sine family is

The generator of a strongly continuous cosine family



Let There exist if if if if

Note that if

First, we recall the definition of the mild solution of system (1.1).
Let

In the following section, before turning our attention to study the well-posedness, let us first rewrite the closed-loop system (1.10) as follows:


Now, we are in a position to study the well-posedness of the closed-loop system (3.2). Our approach relies on the one hand on cosine family theory and on the other hand on a particular Lipschitz estimate for the nonlinear term, which is essential to guarantee the existence and uniqueness of a mild solution.
Then, we have the following well-posedness result.
Assume that



To establish well-posedness, we first derive specific Lipschitz estimates for function (3.3). Consider


Two situations are provided: Case 1: Case 2: Remarking that
Then, for any



To establish that



Integrating the above equality over the interval



Since the function There exists some constant For all It is worth noting that We can obviously deduce, from (3.12) that



In this section, we give sufficient conditions for exponential and strong stabilization of system (1.1).
Let us first consider the following uncontrolled system:

The solution


We can now formulate our main result as follows.
Assume that the assumptions of Theorem


To begin with, we decompose the solution of system (1.1) as






Using the boundedness of the operator












Since the estimate holds for intervals If Let If Since
This achieves the proof.







The stabilization of system (1.1) depends on the value of For For
Applications
In this section, we discuss two examples to show the applicability of our results.
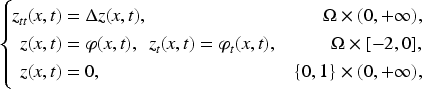
We initially consider a bilinear wave equation with time delay as a type of second order systems. The importance of this equation is a good description for a wide range of phenomena (mechanical waves, acoustics, electromagnetism, fluid dynamics, etc.).
On the interval

In order to apply our previous result, we rewrite (5.1) as an abstract second-order Cauchy problem (1.1) on


It is shown in Travis and Webb (1979) that the operator




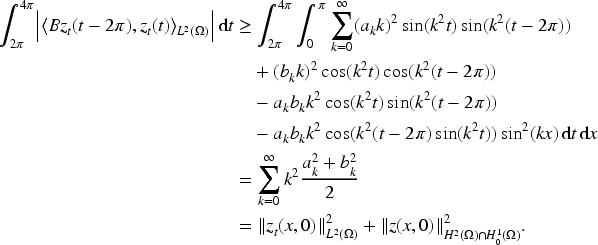
Using the orthogonality of the functions,

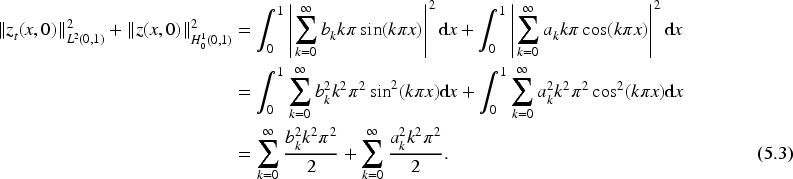
On the other hand, we have
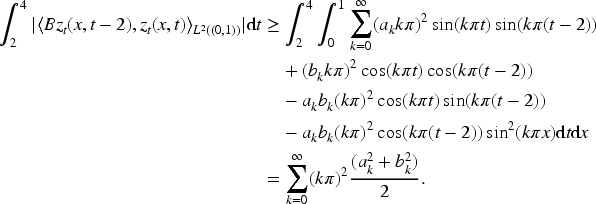

Theorem 4.1 now provides that system (5.1) is stabilizable by the following control:



As a second application, we consider an abstract version of the vibrating beam equation with time delay.
We consider on

Let


It is shown in Fattorini (2011) that the operator




Condition (4.4) is verified; indeed,



In this subsection, numerical simulations have been given to show the effectiveness of the stabilizing control which given by (1.8). In order to illustrate the previous results numerically, we use the finite difference method to perform numerical computations of both displacement and velocity. Let us consider the following system:


Figure 1 shows that the displacements
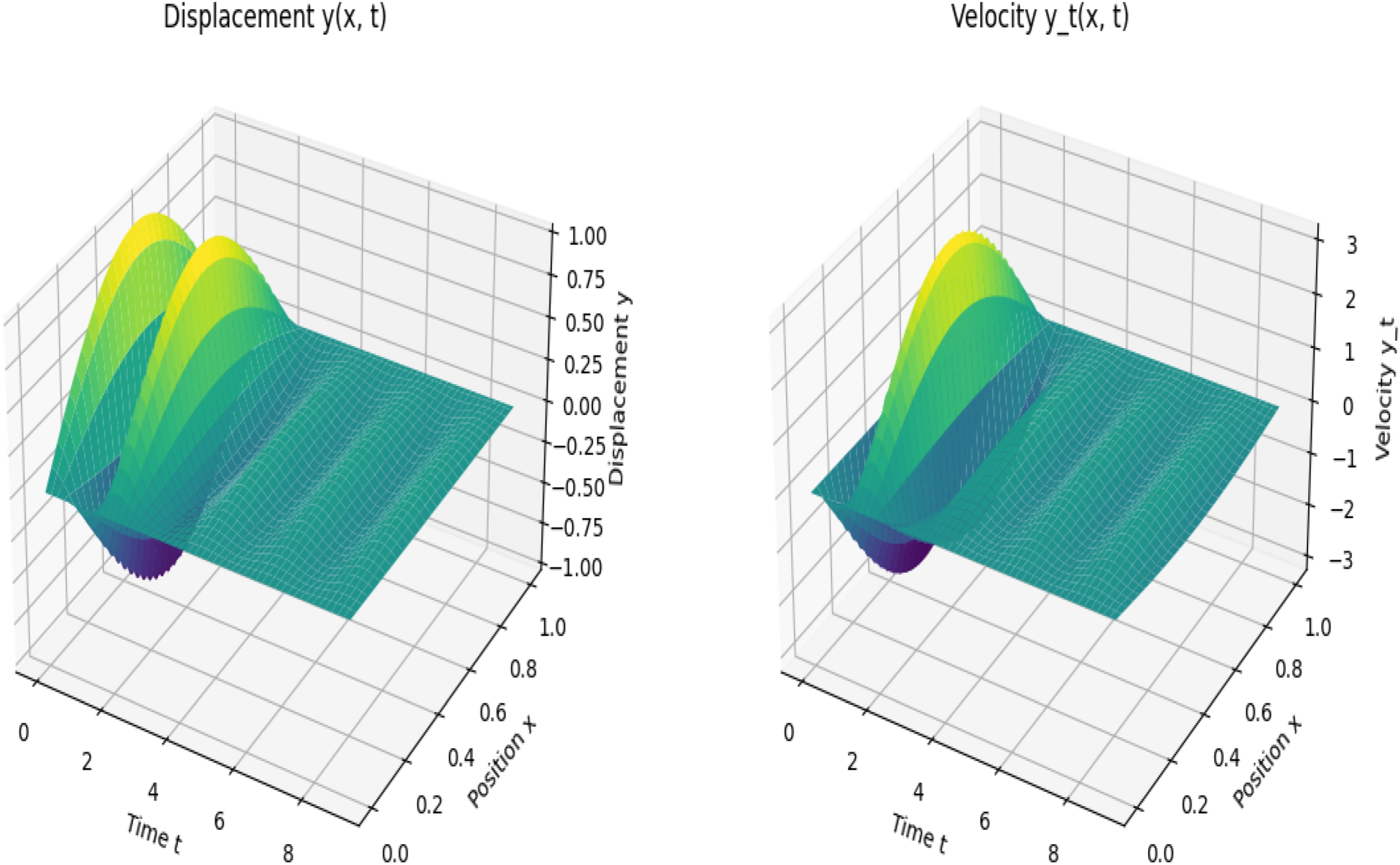
The displacement
Figure 1 shows that the displacement
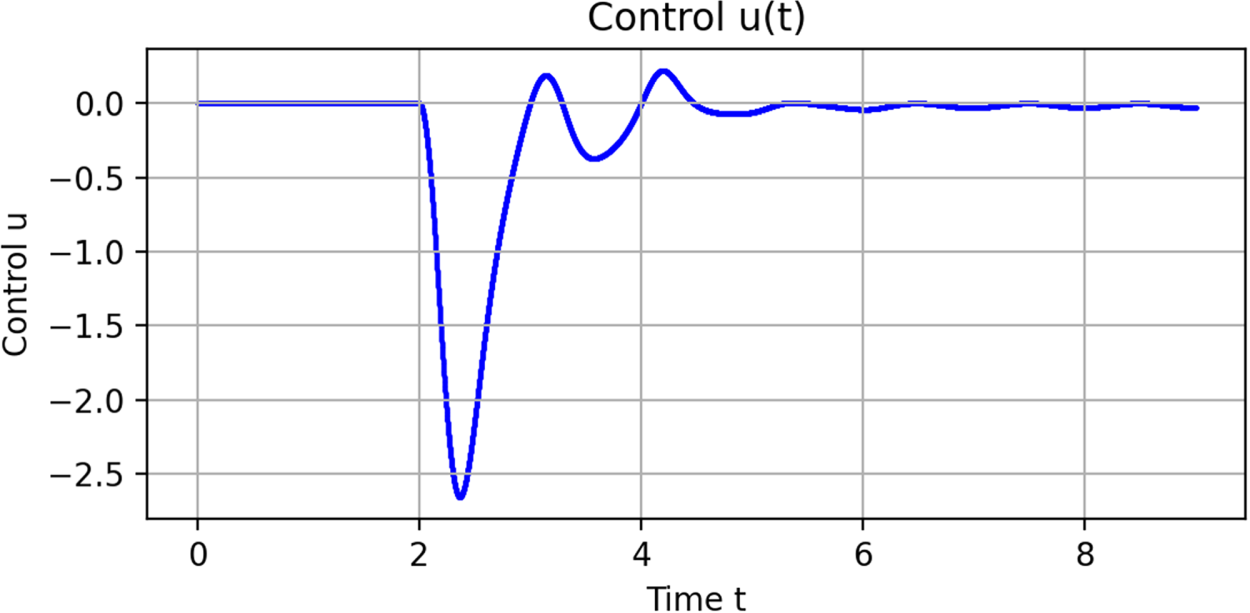
Evolution of control (5.6).
Figure 3 shows that the energy of the system,

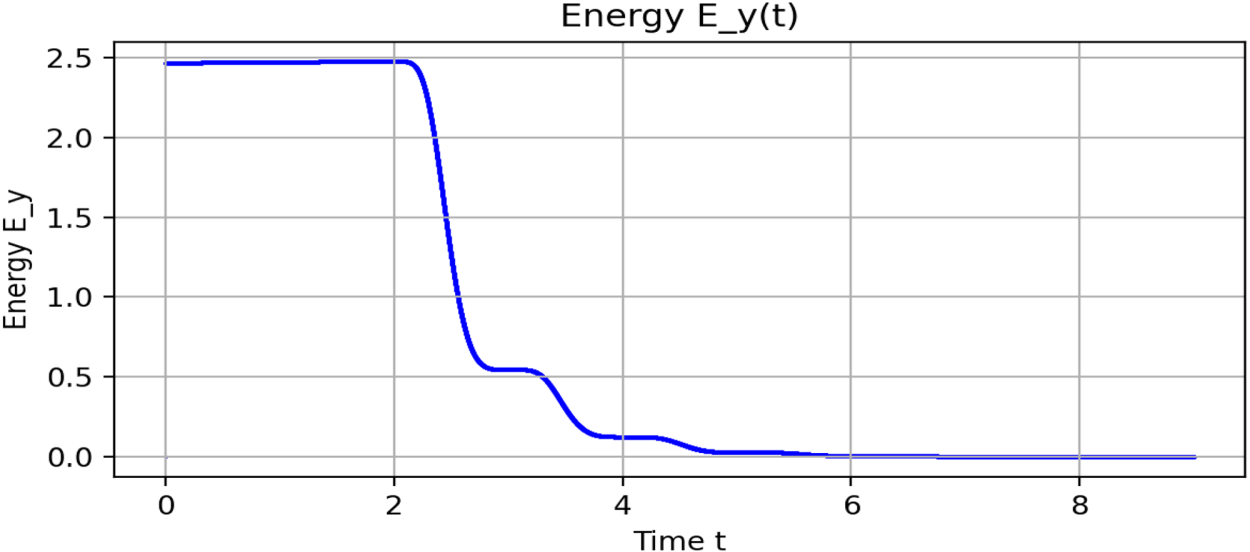
Energy of system (5.5).
In this paper, the question of stabilization with decay estimates for a class of second-order bilinear systems with time delay is explored. Under sufficient conditions we showed that the chosen controls stabilize the system with estimate decay. Some illustrating examples are given with simulation. Various questions remain open. This is the case of semilinear systems.
Footnotes
Acknowledgments
The authors are highly grateful to the anonymous referees for their valuable comments.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Natural Science Foundation of Sichuan Province (No. 2026NSFSC0003).
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.