
Abstract
This short communication presents a simple microswimmer model with a stiff spherical head and a flexible helical springtail for non-Newtonian fluid propulsion at low Reynolds numbers. A closed-form velocity equation was created by modeling the tail as a linear spring under viscous drag with isolated dynamics. The swimmer was created using a biocomposite comprising polylactic acid, Ocimum sanctum extract, and graphene nanoparticles to promote biocompatibility and mechanical qualities. Magnetic actuation in a plasma-analog fluid resulted in a reproducible unidirectional motion, with velocity increasing with spring stiffness and actuation frequency while decreasing with viscosity. Control experiments confirmed the crucial role of tail flexibility. The model supports real-time control, AI-powered navigation, and scalable manufacturing for biomedical microrobotics.
This is a visual representation of the abstract.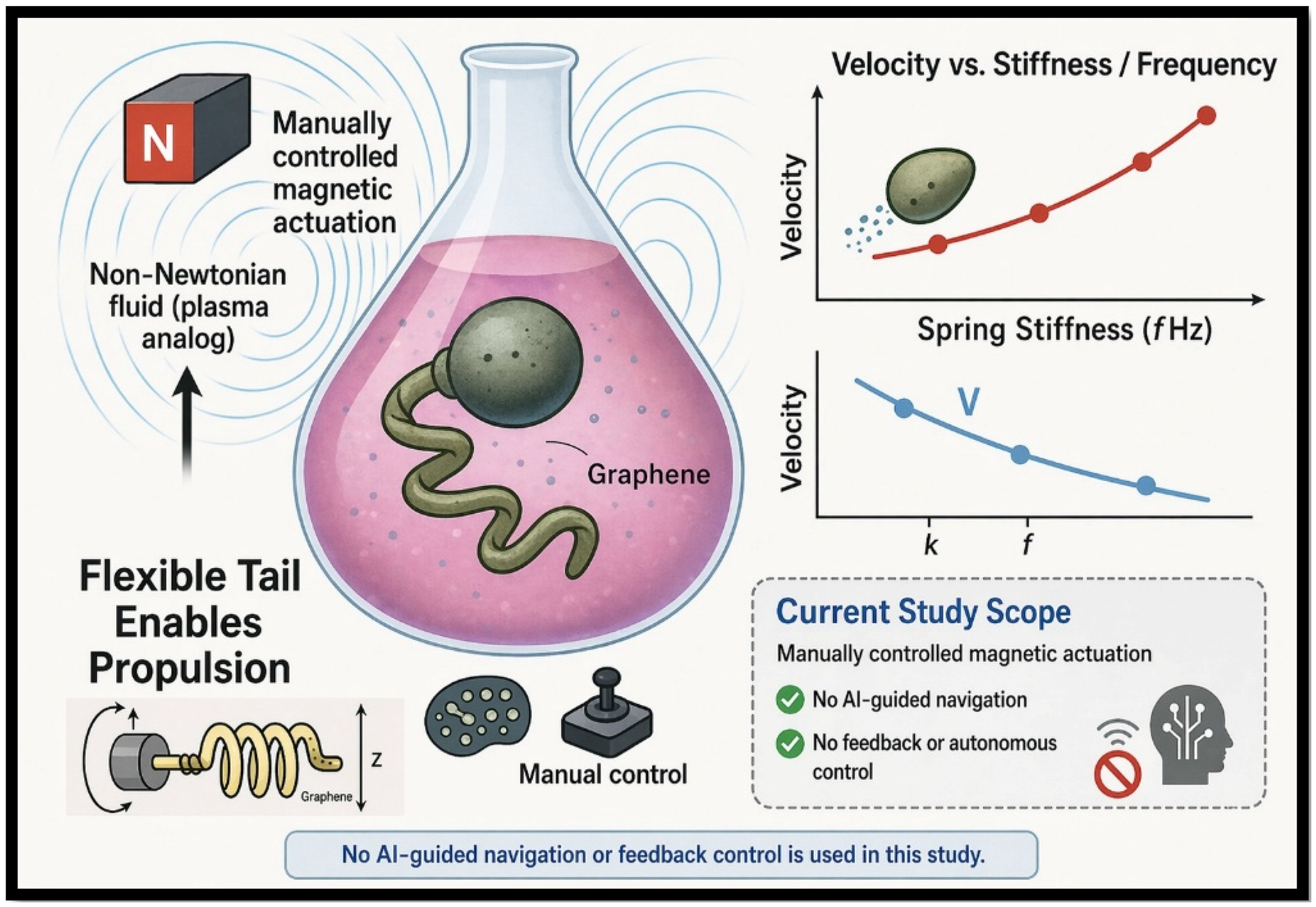
Keywords
Get full access to this article
View all access options for this article.