
Abstract
Traffic noise is a major cause of noise pollution, and impacts of noise pollution on humans have been studied extensively. Previous studies have helped in the development of traffic noise prediction analysis using robust analytical and computational models, parameters connected with traffic, road characteristics, and environment. This study reviewed 11 traffic noise modeling strategies and parameters used by various agencies in different parts of the world. Seven out of the 11 models reviewed in this paper were based on outdoor measurements while the remaining four were based on outdoor and indoor measurements. Considering the cost and time involved in developing these models, there is need to understand existing traffic noise models, differences, and assumptions before adopting or recalibrating them for local demands. This study contributes to the larger body of knowledge and intends to serve as a reference material for future researchers in the area of traffic noise modeling and techniques.
Introduction
Roadways are vital to a region’s socio-economic growth as they serve as the primary mode of transport. Transport systems sustain trade both at national and global levels, as well as provide accessibility to the basic needs of life. However, transport operations have several detrimental effects on the ecosystem and the public. 1 They are, but not limited to, the following: air and noise pollution; exposure to these have been studied by researchers to have a series of demonstrable health consequences, both physical and emotional. In recent years, several studies have identified traffic noise as one of the leading environmental problems globally. The problem is more pronounced in built-up areas. The traffic noise menace is generally associated with urban sprawl, progress in technology, and the extension of roadway infrastructure, triggering environmental nuisances. This situation often tends to increase, particularly in rapidly urbanizing cities, where motorization is also on the increase. In response to these social problems and significant health concerns regarding ambient noise, the European Union (EU) carried out the Directive 2002/49/EC. The goal of the EU is to ensure that environmental exposure to most traffic and industrial noise is avoided or reduced.
Previous research as in Ref. [2,3] divided the effect of traffic noise into four subcategories based on intensity and duration: physical effects (hearing defects), psychological effects (irritability, sleeplessness, and stress), physiological effects (hypertension and abnormal heart rhythm), and effects on work efficiency (decrease in productivity as well as misunderstanding of what is being heard). Additionally, continuous exposure to traffic noise by an individual within proximity to the roadway may lead to long-term health deterioration, like adiposity during pregnancy and risk of overweight in 7-year-old children.4,5 Thus, urban planners and acoustic engineers have come up with strategies to curb traffic noise pollution to ensure an adequate level of service to road users and roadway sustainability.
Traffic noise monitoring data can be used to predict the level of sound intensity using various prediction models, with the aid of noise descriptors for computation and evaluation. However, the tools, technical know-how, and numerical methods of these models are quite complex and cumbersome to adopt by urban planners and, as such, there is a need for some future-oriented research perspectives on traffic noise monitoring and evaluation. This review examines factors that contribute to an increase in traffic noise levels and noise indicators measured or calculated to evaluate the impacts of traffic noise pollution. Also, by comparing models and noise guidelines developed from previous research in developed and developing cities based on their underlying traffic conditions and distinguishing their key assumptions as well as their peculiarities.
Highway noise descriptors
Noise from various sources can be determined or explained differently. An identical type of noise source is calculated or defined by alternative approaches. Scientists have carried out assessments and experimental research to establish descriptors (indicators) to better describe the range of environmental noise sources. These noise indicators represent a physical scale for the description of environmental noise, which has a relationship with an effect on human health. Some descriptors for road noise include the following:
Equivalent continuous sound level, Leq
Noise intensity changes with time; therefore, the equivalent sound level (Leq) is described as a stable situation; it is the average rate of energy the human ear receives over the preceding duration. Hourly sound level equivalent, or Leq(h), is frequently used by state road agencies as a traffic noise descriptor when the duration of the measurement is 1 hour. 6
The n-percent exceeded level, Ln
Researchers focus on a time-dependent noise source when measuring traffic noise. Sounds and noise are relatively not consistent in most cases. Besides the difference in frequency, the ambient noise level varies over time. Ln is the nth-percent of the sound pressure level exceeded over time. 7 The frequently used values of n for the n-percent exceeded level are 10, 50, and 90.
L10 is the level exceeded 10% of the time. In other words, for 10% of the time, the sound or noise has a sound pressure level above L10. For the rest of the time, the sound or noise has a sound pressure level at or below L10. These higher sound pressure stress levels may be due to erratic or recurring events. L50 is the level exceeded 50% of the time. It is statistically the midpoint of the noise readings. It represents the median of fluctuating noise levels. L90 is the level exceeded 90% of the time. It is generally considered to represent the background or ambient level of a noise environment. For a varying sound, L10 is greater than L50, which in turn is greater than L90. 7
Noise pollution level
The noise pollution level considers sound signal changes and therefore acts as a better environmental pollution indicator for community noise dissatisfaction and annoyance. Noise pollution level (NPL)
8
expressed in dB is as

Traffic noise index (TNI)
A further parameter showing the level of traffic flow variance is the traffic noise index (TNI).9,10 This is expressed as

Noise climate (NC)
Noise climate (NC) is the time at which sound rates increase or decrease,
11
and it is expressed mathematically as

Day, evening, and night equivalent noise level (Lden)
Lden is an indicator that is a composite of long-term Leq values for day, evening, and night.
A-weighted decibels dB(A)
A low- and high-pitched sound cannot inherently be distinguished by the human ear. Statistical modifications are made to detect how a common individual hears these sounds. The adjusted measurements are known as A-weighted decibels, dB(A).
Factors contributing to traffic noise
Certain variables related to noise generation and propagation, such as traffic volume, vehicle composition, velocity, road features, etc., could have a major influence on noise prediction from vehicular traffic. Generally, these factors can be categorized into four clusters:
Traffic factors
These consist of traffic volume, traffic speed, vehicle composition, creation of traffic jams, and bottlenecks. With an increase in traffic volume, the noise level increases. A small reduction in vehicular traffic may minimize noise by reducing the average number of traffic acoustics. Trucks and buses contribute more noise to the environment compared to cars. An increase in truck traffic mix ratio will increase the noise level. For both congestion and pollution levels, the traffic mix is a significant factor. Heavy vehicles and bikes are excessively loud. Just one heavy vehicle at a speed of 30 km/h can generate noise equivalent to noise from 15 cars. 12 Traffic noise is influenced by a mixture of rolling noise (arising from the tires communicating with the roadway) and propulsion noise (such as exhaust emissions, diesel engines, motors, and brakes). Tire–road impacts are usually the main cause of sound above 55 km/h in most cars and over 70 km/h in trucks with engine sound predominating at lower speeds, although adjustments in innovation mean that rolling noise can now be controlled at rates over 20–40 km/h for brand-new vehicles and 30–60 km/h for brand-new lorries. 13
Road factors
The state of roads is one of the key reasons for rising traffic noise pollution. Narrow roads, pavement surfaces, and recurring road maintenance all contribute to traffic jams in traffic and thus to increasing noise. These sound features are typically reliant upon appearance (smoother tires and pavement typically result in lower noise levels). 14
A line of moving vehicles closely separated produces road traffic noise. This allows a recipient to experience a sequential source of noise rather than just one recognizable noise point. The noise is diminished or decreases as the distance from the highway increases. With a flat topography, each time the distance is doubled, the noise level is usually decreased by approximately 3 dB(A) as the noise level moves over rigid surfaces and approximately 4.5 dB(A) over soft surfaces when all other factors remain constant. 15
Vehicle factors
Some components from the vehicle can also be a contributing factor in increasing noise, such as the noise characteristics of engine type and size, type of horn, and age of the vehicle. Vehicles exceeding 12 tons in weight and powered by engines of over 200 HP generate noise ranging from 91 to 92 dBA at a distance of 8 m, while vehicles not exceeding the weight of 3.5 tons and powered by engines not exceeding 200 HP generate noise of 85 dB(A) at the same distance from the road. 16
Human factors
Reckless driving, or the driver’s frame of mind, can influence his driving and this can also be a contributing factor in noise generation. Knowledge of noise levels on the roads is required to develop and plan remedial action. Several models of traffic noise prediction have been developed and are used as a policy tool for noise prediction and highway simulation.
Traffic noise models
The fact that road noise is a pollutant has led to the development of statistical and predictive models that take into account the source, propagation, and effects on the receptor. Models for traffic noise estimation commenced over 60 years ago, and the outcomes are still reliable. In 1952, the first traffic noise model was developed as stated in the Noise Acoustics Handbook by Anon
17

This model considers the 50th percentile noise indicator and the input parameters are traffic volume (V) and distance (d),
18
formulated a model by applying noise sources from different engine vehicles. For every engine type, its noise level varies with the engine capacity and speed


From equations (5) and (6),
Adhering to the International Standard Organization (ISO R 362),
19
the authors measured these parameters to be considered for the generation of traffic noise models, which are the speed of vehicles and the height of measurement from ground level. They noted that perception from the noise source to receiver differs. Thus, the authors formulated certain noise indices which are L
m
, the maximum noise level; L
eq
, the equivalent noise level measured for 10 seconds; and lw, acoustic power. Therefore, the relations between them for a distance d = 7.5 m at a height of 1.2 m and different speeds (30 km/hr, 60 km/h, and 120 km/hr) of vehicles are given by


In addition, given that several models have been built globally, the characteristics of various countries have been taken into consideration in terms of roadways, vehicles, and weather features. Several countries have adopted monitoring and controlling the use of these models, which can be implemented in the simulation of traffic noise.
FHWA model
The Federal highway administration (FHWA) model, just like several other prediction models, was developed for the United States of America as in Ref. [20]. They arrived at an estimated level of noise over several modifications. The energy emission standard for traffic streams for varying distances from the lane, for a finite length of roads, and shielding is a benchmark in the FHWA model. The following equation ties all these variables
In the FHWA model, the microphone is located along the line to the middle of the lane at a 15-meter distance from the middle of the lane at a height of 1.5 m. The ground between the pavement and the microphone will be smooth and without reflective surfaces while the vehicles travel on a straight, low-speed, flat road.
When D is less than 15m, the sound level is computed as follows
For hard site (absorptive) ground
The technique applies only to flat roads and constant velocity cars, but approaches are used to model for curved roads and several lanes. In this model, it is assumed that emission levels within groups of all classes of vehicles are normally distributed and the loss of propagation is sufficiently reflected by distance impacts.
Interrupted flow (stop-and-go traffic) model
Most traffic noise models derived have been mainly based on freely moving vehicles and are consequently not applicable to traditional city roads which are disrupted by flows, such as signals, speed humps, etc., as these interrupt traffic. An equation for the estimation of disrupted flow from curbside noise was examined in this analysis. The provisional model equation was generated at College Imperial London.
21
The equation was of the form


This equation did not provide the dispersion factor,
CoRTN model
The Calculation of Road Traffic Noise Model 22 (CoRTN) procedure for the estimation of road traffic noise was developed for the United Kingdom by the Department of Transport. This model postulates a line source of noise traffic and steady speed traffic and is the only method in Britain for evaluating the potential impacts of vehicular traffic by highway agencies. 17
The CoRTN traffic noise prediction model is

Each of the CoRTN model parameters is defined mathematically below


where G denotes the slope, only assigned for extremely steep roadway pavement





Last, an adjustment to the equivalent noise level (Leq) is required because the CoRTN model is factored on

ERTC model
In Thailand at the Environmental Research and Training Centre, a model for environmental impact assessment was developed using the equivalent noise indicator for evaluation 23 ; vehicles were classified into large and small vehicles based on their power average level, which is given by:
Large vehicles group

Small vehicles group




Correction value for diffraction attenuation. 24
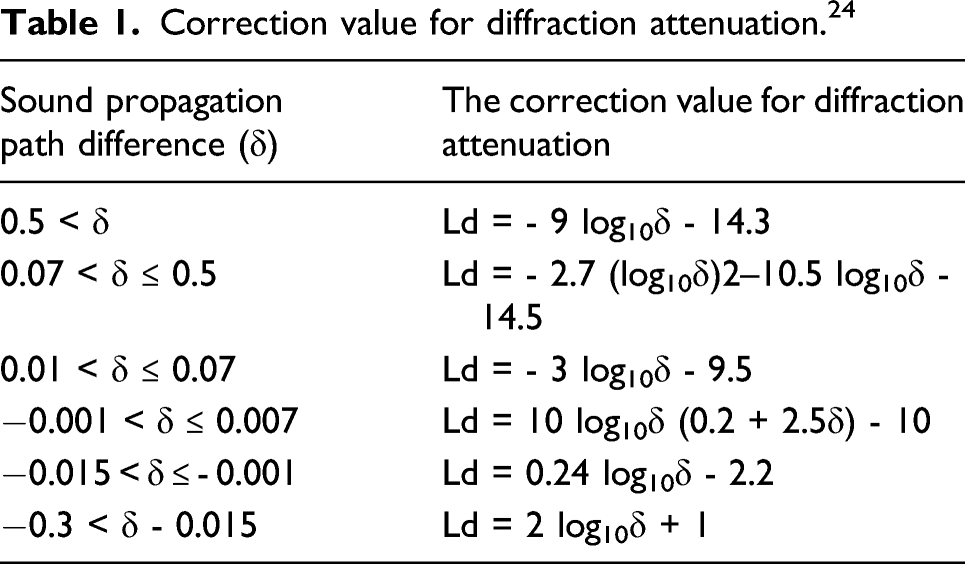
Then, the equation for actual calculation becomes
Burgess model
This model was developed at the National Physical Laboratory,
25
for Sydney Metropolitan Area. Factors considered during the measurements were traffic was free-flowing with no signal; the roadway was level, with the microphone set at 9 m away from the middle of the road; no shielding at a distance of 20 m was considered from parked vehicles and parks; and along the path of measurement, the microphone was set 10 m away from the nearest reflecting surface. Measurements of vehicle flow, speed, and noise were recorded for 10 min. The predicted L
10
formula is thus
As comparisons between the measured and predicted measurement were above the permissible range, a modified model was developed
The above formula did not consider average speed, as it was assumed that most vehicles were traveling at a steady speed when passing through the measurement point. The omission of
Further analysis was carried to develop an equivalent noise level equation as this is also an assessment for road noise annoyance and is widely used and accepted. This also gave a satisfactory correlation value of 0.95 with a standard error of 1.5 dB(A) when compared with measured Leq. The 
Nevertheless,
25
we concluded that heavy vehicles added to the noise levels of traffic, and the removal of speed minimized errors and simplified the model. Hence, the
British Standard (BS-5228)
This section of BS-5228 sets guidance on methods to predict and quantify noise and determine its effect on those who are subjected to it. The prediction of equivalent continuous sound level for earthmoving machinery (mobile plant) that travels at intervals along the road, most times during construction, is achieved by calculating Leq using the following method 26 :
The expression for Leq is given by

Adjustments for the nature of the ground over which the sound is propagated are also calculated. The ground is classified as soft, hard, or mixed. If the distance 


ISO 9613
ISO (International Standardization Organization) is a global network of standard bodies. This aspect of ISO 9613 explicitly states an engineering method for determining sound attenuation during outdoor propagation to predict noise levels at a distance from a myriad of different sources which may be in motion or static. The sound propagation effects are geometrical divergence, atmospheric absorption, ground effect, reflection from surfaces, and screening by obstacles.
The equivalent sound pressure level at the receiver, in downwind conditions, is calculated for each point source based on the formula

It is a sum of the attenuation due to the geometrical divergence, the atmospheric absorption, the ground effect, the barriers, and miscellaneous other effects. The geometrical divergence accounts for spherical spreading in the free field from a point sound source, making the attenuation in decibels as
The sound attenuation due to atmospheric absorption 
The ground effect is mainly the reflection of the sound rays that interact with the direct rays. For terrains approximately flat or with a constant slope, it depends on the source of noise, the type of terrain, and the receiver height. Barrier attenuation is calculated for each octave band based on variants as the wavelength and meteorological effects.
27
For long periods, the meteorological correction is applied; in this case, the long-term average sound power (
Nordtest
The approach defines exactly how to measure the noise level at a given position in a distinct way, and by determining road traffic noise all at once using several microphone positions, the noise levels in these positions can be efficiently figured out. By determining the traffic noise continually for a certain period, the equivalent noise level for that time can be identified directly.
28
The 24-h equivalent noise level LAeq,24h can be identified based on a complete 24-h measurement. If the noise levels during the day, evening, and night are identified independently, LAeq,24h can be figured out by making use of
As an option to measuring throughout the entire day, night, or evening period, measured noise levels from the traffic passing throughout the measurement period can be converted to correspond to average traffic conditions. This conversion can be made by using the below equations:
Heavy vehicles
Light vehicles

Finally, the equivalent noise level calculation is given by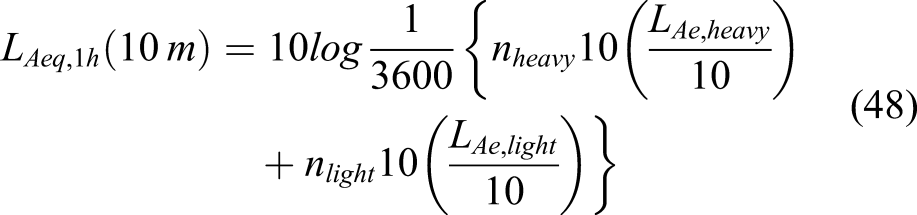
Acoustical Society of Japan model
The Acoustical Society of Japan (ASJ) RTN-models are used to design environmental preservation measures (noise abatement measures) and to estimate the current state of noise during environmental monitoring (regular observation). The model is based on certain conditions: type of road (pavement, geometry, and signalized/unsignalized), traffic volume, running speed of vehicles (for steady and non-steady flow), prediction range (length of roadway and height of measurement above the ground), and meteorological conditions.29,30
The sound power level of road vehicles generally varies with the vehicle speed, engine rotational speed, and engine load.
31
The ASJ sound power level model is given simply as a function of the vehicle speed, though the change in the noise generated due to the pavement type, road gradient, and noise directivity is considered in the correction terms. The A-weighted sound power level of a road vehicle (L
wA
) is given by
For steady flow steady traffic flow section (a section of the expressway or general road and without or distant from signalized intersections), with vehicle speed 
Non-steady traffic flow section (general road including signalized intersections), with vehicle speed V in the range from 10 to 60 km/h
The values of coefficients in equation (51) are provided in Ref. [29] separately for sections of steady and non-steady traffic flow according to the different classes of vehicle.
CNOSSOS-EU method
This research analyzes recorded data of road traffic simulations of the equivalent sound level. The CNOSSOS-EU model aimed to establish long-term indicators for a year. Toward this purpose, traffic noise and vehicle control systems were mounted in certain locations utilizing fixed surveillance devices to capture the measuring values all through the year. 32 Vehicles were categorized into four classes (1-light motor vehicles, 2-medium-heavy vehicles, 3-heavy vehicles, and 4-powered two-wheelers). Sound level emissions are categorized as: propulsion (exhaust systems or engine noise) and tire–road interaction (rolling noise). 33
The propulsion sound power level from the Cnossos-EU model is given by
Rolling sound power level

Environmental noise guidelines
In view of the unprecedented increase in pollution from environmental noise, some countries and organizations have established allowable noise levels for the reduction of noise from road traffic. Some of these are discussed below:
World health organization
World Health Organization community noise guidelines.

Source: 34
Nordic method
This method was developed by the Nordic group of experts to predict roadway noise in Nordic country 35 with road surface pavement dry and free from snow or ice. It is mainly designed to predict noise in front of a façade and can also be applied for indoor noise measurements. Measurement of the sound exposure level (LAe) developed was a function of average speed taken at10 m from the centerline of the road; vehicles were classified as light (<3.5 tons) and heavy vehicles (>3.5 tons). The effect of dispersion of noise was based on the fact that noise travels 0.5 m above the road surface from source to receiver and the sound-absorbing effect between source and receiver varies according to the type of road surface; this they classified as hard ground (asphalt, concrete, and soil with no vegetation) and soft ground (soil with vegetation) . 35 In this method, noise from tire–road interaction is not included as the speed of test vehicles was driving on full acceleration <50 km/h indicating a driving situation where the engine sound is the dominant sound source. And so, noise from vehicular speed >60 km/h cannot be applied to this method.
Free field noise guidelines.

These guidelines are used as standards in land use planning for new roads but are not used in relation to existing roads and existing homes.
The US Federal Highway Administration (FHWA)
The US Federal Highway Administration (FHWA) noise standard.
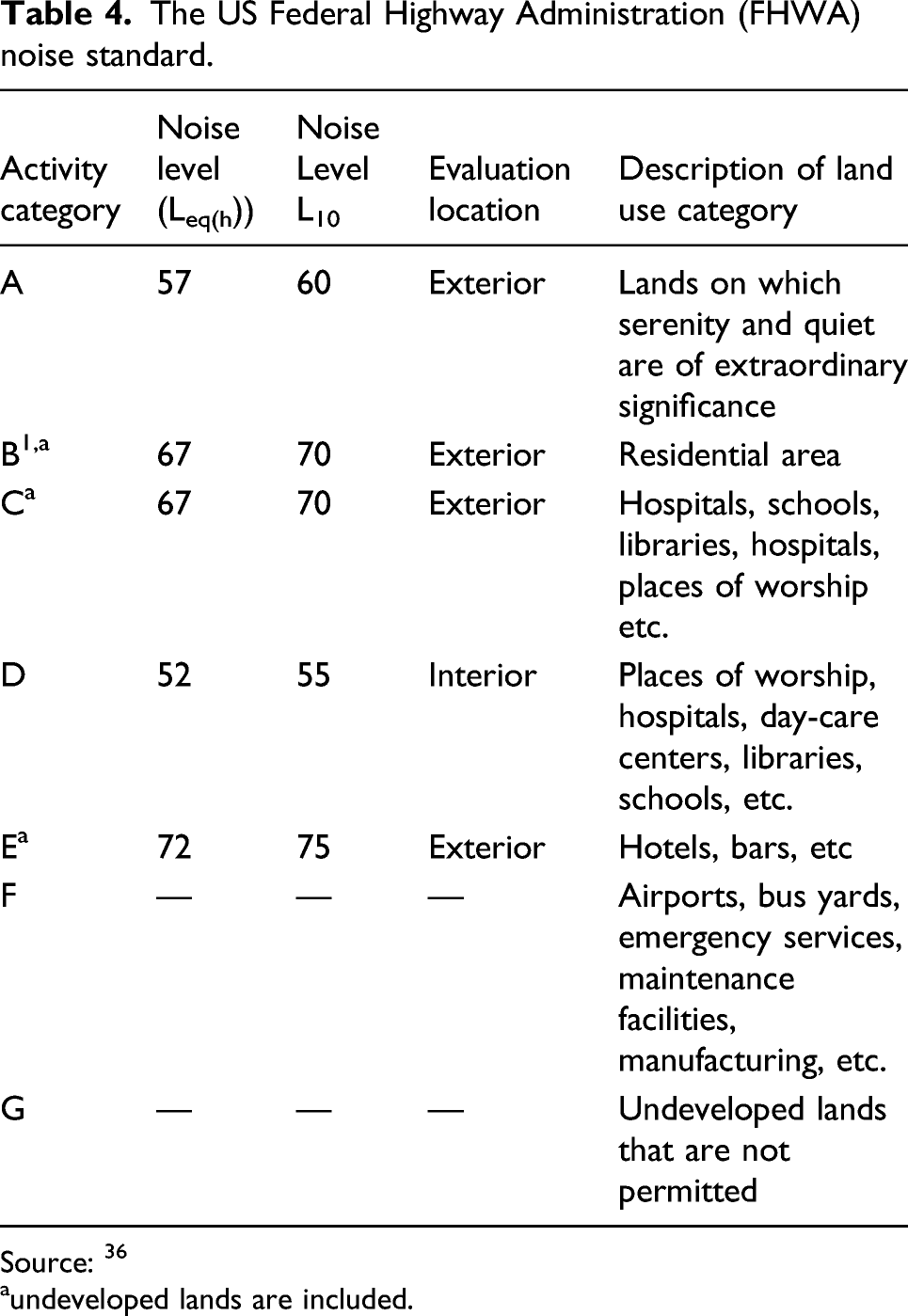
Source: 36
aundeveloped lands are included.
The Leq(h) and L10(h) activity criteria values are for impact determination only and are not design standards for noise abatement measures and either of them (but not both) may be used on a project.
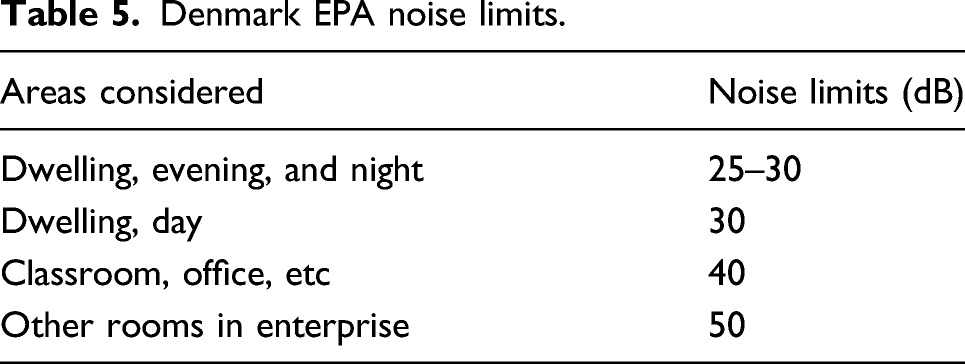
Denmark environmental protection agency
Denmark EPA noise limits.
Discussion
The findings from the reviewed articles revealed that traffic noise models are developed to assess and predict traffic noise to mitigate the environmental impacts it has on the inhabitants. It is important to study the causes and effects of noise in terms of its indicators (
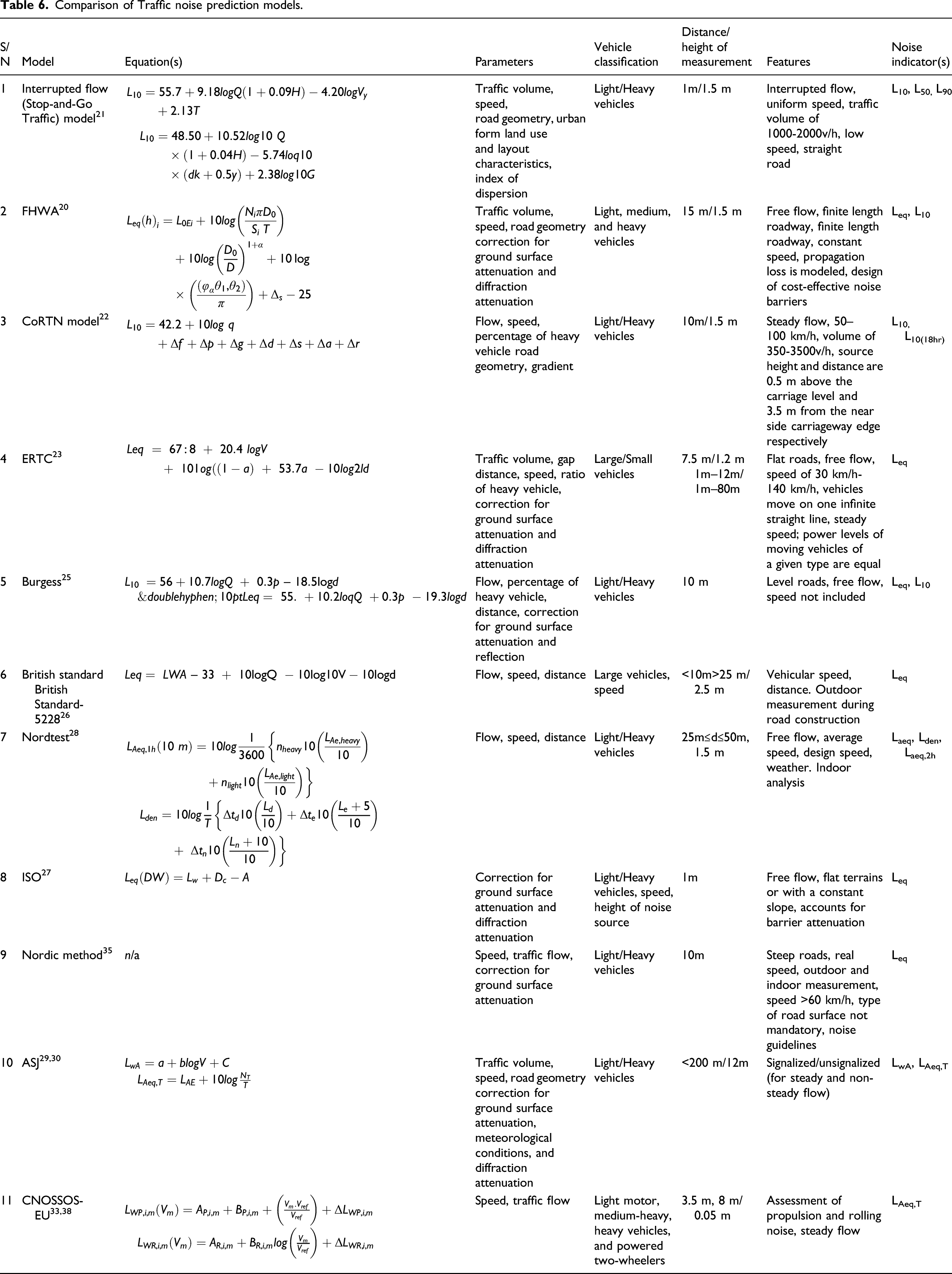
In its performance, the Burgess model remains suitable as a measure explaining the distribution of noise caused by social groups, land use, and urban growth within urban areas. In the FHWA model, vehicles are classified into light commercial vehicles, medium trucks, and heavy trucks. These vehicles are expected to traverse flat roads with constant velocity. As a result, no separate acceleration or deceleration lanes are incorporated, unlike the CNOSSOS-EU method.
For the Interrupted Stop-and-Go model, vehicles are classified as light or heavy. The flow of these vehicles in the traffic stream is continuously interrupted. The model assumes a straight road with a good surface condition on which vehicles traverse with a steady uniform speed of traffic.
This is not the case for FHWA and CoRTN noise models which consider free flow and steady flow of vehicles, respectively. CoRTN allows no adjustment for downhill driving conditions in terms of terrain because the technique does not take into account engine braking noise often emitted by heavy vehicles while descending. The model allows curve fitting of measured data in which the parameters of source emission and sound propagation are organized in graphic format to provide a reasonably simple prediction method.
ASJ, Nordtest, and Nordic consider both outdoor and indoor effects of traffic noise level on inhabitants. ASJ model is applicable for light and heavy vehicles at signalized and unsignalized intersections with the steady and non-steady flow. However, the Nordic noise model is applicable for light and heavy vehicles moving with a speed not more than 60kmh along steep roads and proves to be more effective in correcting ground surface attenuation, while the Nordtest method is best suited for light and heavy vehicles moving at free flow with average speed.
ISO and other noise models capture the outdoor effect of traffic noise level only. It is best suited for free flow moving vehicles on flat terrains or with a constant slope and accounts for barrier attenuation. One limitation that makes it impracticable in practice is that the standard estimates only moderate downwind conditions when defining atmospheric attenuation. Another drawback is that, within 1 km, the standard only provides approximate accuracy. This implies that forecasts beyond 1 km will significantly vary from the results measured.
Comparison of Traffic noise prediction models.
Conclusion
To be able to develop strategies to mitigate the negative consequences of traffic noise, it is important to understand how to measure it. As such, the analysis of traffic noise requires some theoretically consistent quantitative techniques that may be transferable or adjustable to local conditions. In this study, 11 traffic noise models from different parts of the world were reviewed. It was observed that researchers from different countries have developed traffic noise prediction models by adopting some of the earlier models as a baseline or replicating, and testing them for their applicability and reliability in predicting roadway noise based on their underlying local traffic conditions. This has particularly been the case due to costs and time involved in developing new traffic noise models.
This comprehensive review of traffic noise modeling strategies has revealed that prior to recent data-driven noise reduction efforts, the effective methods and control procedures of traffic noise were to reduce the noise emission from the source, noise control within the sound transmission path, protection at the receiving end, land use planning, education, and public awareness. In recent years, studies have shown that with integrated noise permissible limits and regulation, policies need to be fully implemented for noise amelioration. This is because traffic noise assessment and evaluation can enhance urban planning for envisaged road networks and possibly help in curbing noise pollution on existing traffic corridors, thereby ensuring the safety of the inhabitants and sustainability of the environment.
Therefore, it is recommended that the current noise guidelines be revised and updated because they are obsolete as there has been a rise in automobile traffic, population, urbanization, etc. in cities. Furthermore, for further analysis, traffic noise modeling should include examining and analyzing different noise emissions from vehicle components, such as the horn, exhaust, etc. In addition, noise assessments also should be carried out during road construction and maintenance as transport projects are not only assessed on their economics and characteristics but also on their impacts. These could therefore identify the significant factors leading to noise generation and thus promote mitigation processes for sustainable roadway infrastructure.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Regional Transport Research Education Centre, Kumasi
Notations
dB
Decibel
Leq
Equivalent sound level
Ln
n-Percent exceeded level
NPL
Noise pollution level
TNI
Traffic noise index
NC
Noise climate
dB(A)
A-weighted decibel
v, N
Speed
C
Engine capacity
lm
Maximum noise level
lw
Acoustic power
d
Distance
FHWA
Federal highway administration
Q, q
Traffic volume
H, p
Proportion of heavy vehicle
CoRTN
Calculation of road traffic noise model
f
Volume of heavy vehicle per hour
PWL
A-weighted energy average power level of vehicle
LWA
Weighted sound power level
a
Angle view of the road
Cmet
Meteorological correction
m
Classes of vehicle
HP
Horse power