
Abstract
Enhancing the control performance of the tractor-trailer air suspensions can improve the driving efficiency and handling ability (DP-HA) of the driver. Based on the dynamic model of a multi-axle tractor-trailer using air suspensions, three different control cases including the control of the damping values in dampers, the control of the stiffness values in airbags, and the control of both the damping and stiffness values of the air suspensions are studied and simulated under different working conditions of the tractor-trailer, respectively. A new control method combining fuzzy controller and genetic algorithm program is also examined and applied to control the damping and stiffness values of the air suspensions. The study indicates that the air suspensions using the different control approaches improve the DP-HA of the driver better than without the control. Besides, the control performance of the damping values is better than that of the stiffness values under all various operation conditions of the tractor-trailer. Significantly, by combining both control methods of the damping values and stiffness values, the isolation performance of the tractor-trailer air suspensions is strongly enhanced in comparison with using the controlled damping or controlled stiffness values. Therefore, the combined control method of both damping values and stiffness values should be developed to further improve the DP-HA of the driver.
Keywords
Introduction
In tractor-trailers traveling at high speed on the national highway, under the excitation of the uneven road surface in the low frequency region, the driving performance and handling ability (DP-HA) of the driver is quite low. This is because tractor-trailers are mainly equipped with leaf spring suspension systems with constant stiffness, thus, under the excitation of the low frequencies, the resonance frequency of the road surface and the stiffness of the leaf spring are very high.1–3 In order to improve the DP-HA of the driver, the leaf spring suspension systems of heavy trucks have been researched and developed by using air suspension systems with variable stiffness.4,5 Theoretical and experimental studies of air suspension systems equipped on heavy trucks have proven that the stiffness of the air suspension system can be changed and depends on the excitation frequency, the stiffness of the airbag increases when the excitation frequency is low below 10 Hz. On the contrary, the stiffness of the airbag decreases when the excitation frequency increases above 10 Hz.6,7 Based on this characteristic of the air suspension system, the installation of air suspension system has significantly improved the DP-HA of the driver.
The air suspension system of heavy trucks is usually equipped with air springs and hydraulic dampers. In order to further improve the isolation efficiency of the air suspension system equipped on heavy trucks, the control software of the fuzzy controller, proportional-integral-derivative controller, Hinf controller, or neural network controller were also studied and applied to control the damper coefficient.8–11 With the damper parameter adjusted to suit the vehicle vibration excitation based on these control methods, the isolation efficiency of the air suspension system has been significantly increased compared to the passive air suspension system. In addition, in the models of the air suspension system, the airbag has been connected to the reservoir through the connecting pipe and the throttle valve. The stiffness of the airbag could change and significantly affected by the throttle valve.4,5,12 Based on this characteristic, the throttle valve of the air suspension system was also studied and controlled to control the stiffness of the airbag. Thus, the isolation efficiency of the air suspension system with controlled stiffness was also better than that without control. 12 However, the evaluation of the isolation performance of air suspension systems using controlled damping or controlled stiffness has not been clarified in current studies. Furthermore, the combination of both the controlled damping and controlled stiffness in air suspension systems can also further improve the isolation performance of tractor-trailer air suspensions. However, this issue has not been evaluated yet.
Accordingly, to supplement the existing shortcomings in the air suspensions of tractor-trailers, based on the dynamic model of a multi-axle tractor-trailer using air suspensions, three different control cases including the control of the damping values in dampers, the control of the stiffness values in airbags, and the control of both the damping and stiffness values of the air suspensions are studied respectively. In order to improve the control efficiency, a new control method combining fuzzy controller and genetic algorithm program is also studied and applied to control the damping and stiffness values under different working conditions of the tractor-trailer. Improving the DP-HA of the driver is the objective study.
A dynamic model of a tractor-trailer
The tractor-trailer includes the tractor-driver and trailer-truck. The tractor-driver is equipped with engine and transmission systems to pull and guide the vehicle while the trailer-truck is used to carry the load. The tractor-driver and trailer-truck are connected through an articulation. To reduce oscillations and ensure the ability to withstand heavy loads, the tractor-trailer is equipped with three air suspension systems with five wheel axles. The schematic diagram and the oscillation model of the tractor-trailer are shown in Figure 1. Mathematical model of a tractor-trailer.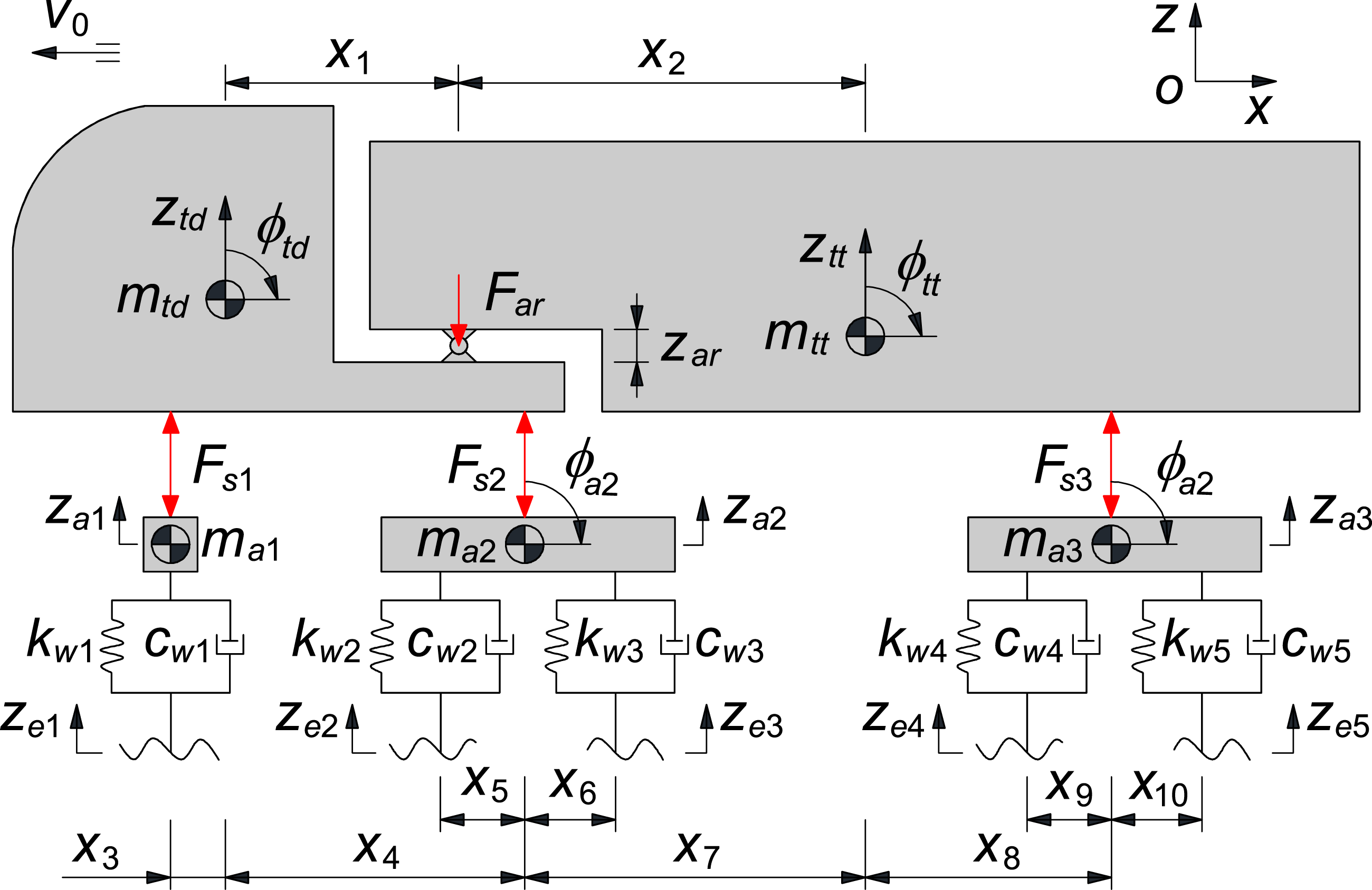
Where z td , z tt , za1, za2, and za3 are defined as the oscillations of the tractor-driver, trailer-truck, 1st axle, 2nd axle, and 3rd axle in the vertical direction of the tractor-trailer. ϕ td and ϕ tt are defined as the angular oscillations of the tractor-driver and trailer-truck in the pitching direction. m td , m tt , ma1, ma2, and ma3 are defined as the mass of the tractor-driver, trailer-truck, 1st axle, 2nd axle, and 3rd axle, respectively. {cw1, cw2, cw3, cw4, cw5} and {kw1, kw2, kw3, kw4, kw5} are defined as the lumped parameters of the damping and stiffness in the wheels of the 1st axle, 2nd axle, and 3rd wheel axles. ze1-5 are the oscillating sources at the wheels while x1-10 are the distances of the tractor-trailer.
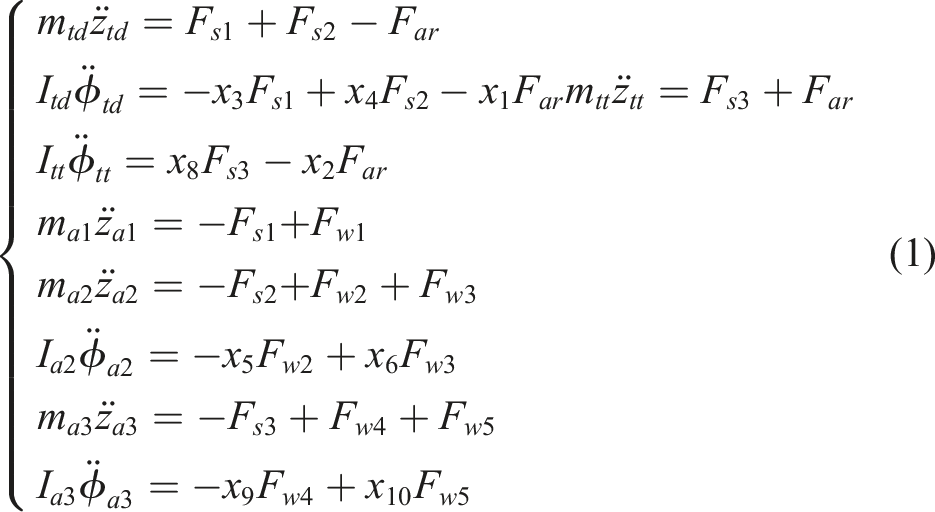
Based on the tractor-trailer’s dynamic model shown in Figure 1, the oscillation vibrations of the tractor-trailer can be expressed as follows:
In equation (1), the dynamic force in the articulation F
ar
can be calculated by:

The dynamic forces of the wheel axles {Fw1, Fw2, Fw3, Fw4, and Fw5} in equation (1) are deterrmined as follows:
The dynamic forces of the suspension systems of the tractor-trailer {Fs1, Fs2, and Fs3} in equation (1) are calculated in the next section.
Model of tractor-trailer’s control suspension
Studies on heavy truck suspension systems have shown that air suspension systems improve the ride comfort compared to leaf spring suspension systems.1,13,14 Therefore, air suspension systems are gradually being used to replace traditional leaf spring suspension systems. In this study, air suspension systems using airbags are also applied to establish the suspension model of the tractor-trailer. Due to the structure of the air suspensions at the 1st axle, 2nd axle, and 3rd wheel axles being similar, thus, to calculate the dynamic forces of suspension system F
s
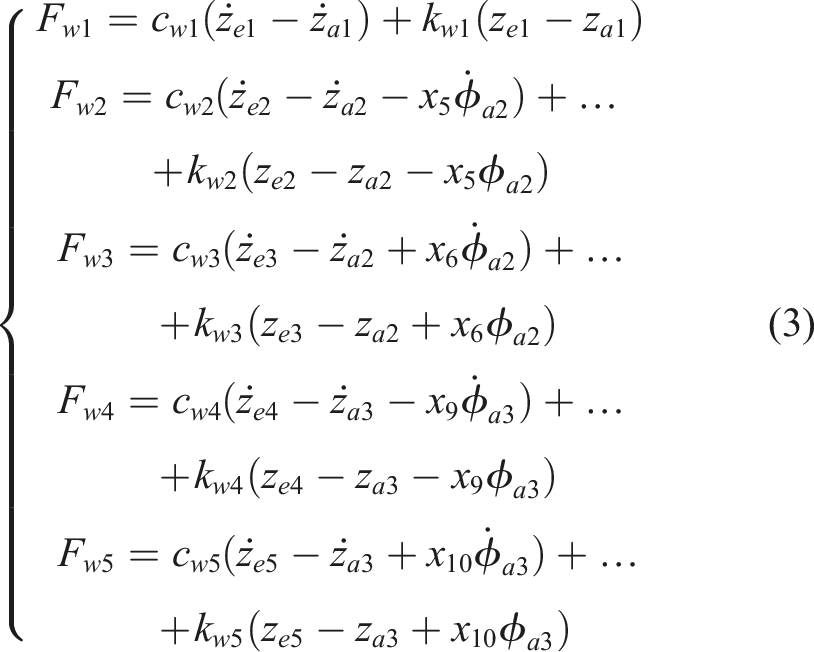
= [Fs1, Fs2, Fs3], a typical air suspension model established in Figure 2(a) 13,14 is used to calculate the dynamic parameters of the model. Besides, to enhance the performance of the air suspension, the control of the damper or valve in the pipe is also studied. The control model of the air suspension has been plotted in Figure 2(b). (a) Structure of an air suspension and (b) its control model.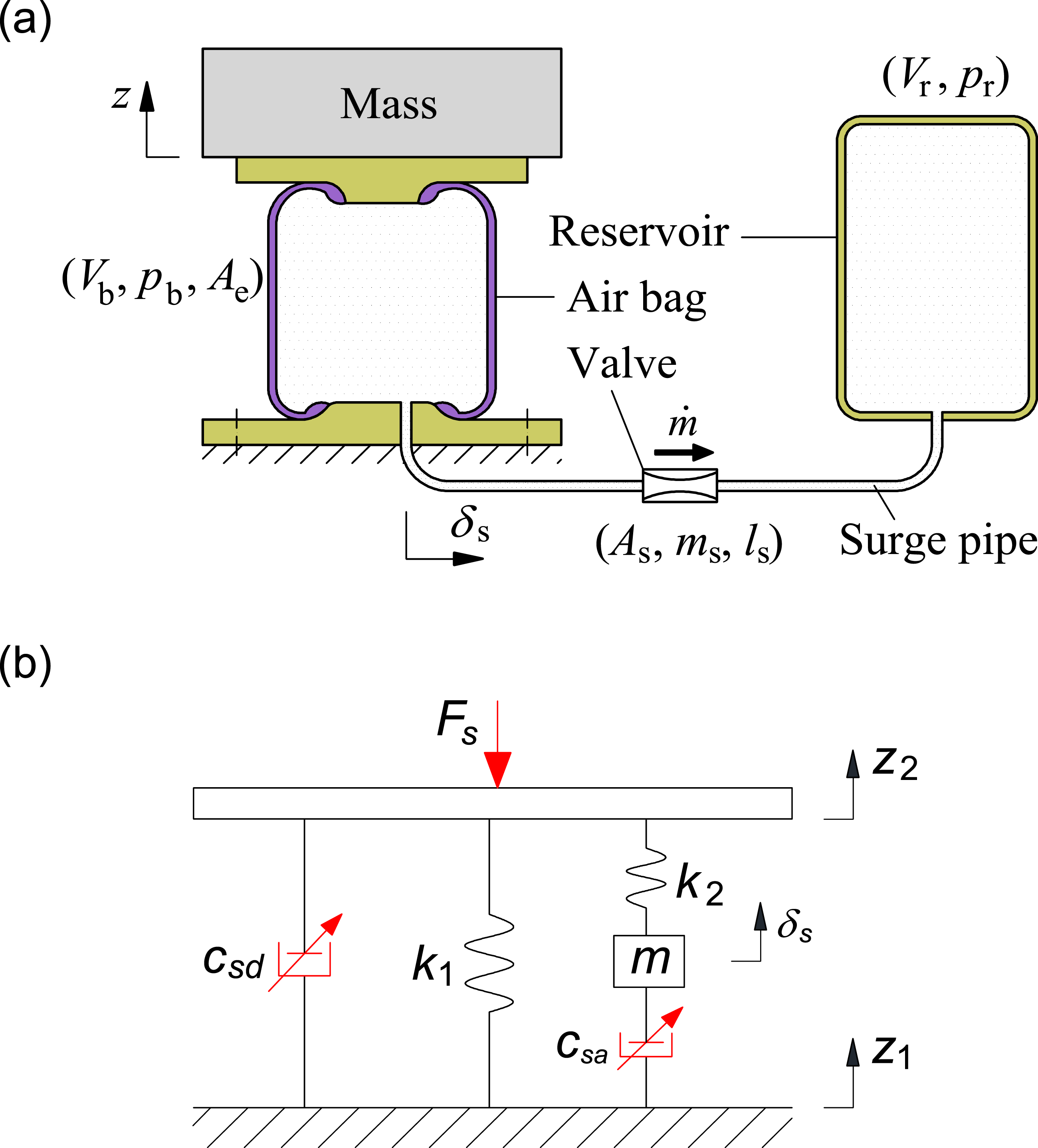
Where c sd is the control damping value of the damper, c sa is the control damping value of the air suspension, k1 is the static-stiffness, k2 is the viscous stiffness, m is the mass of the air, δ s is the air displacement in surge pipe, and z = z1 – z2 is the displacement of the airbag in the vertical direction.
The model of the air suspension in Figure 2(b) shows that the F
s
is the total force of the damping force F
sd
of the damper and elastic force F
se
of the air spring. Thus, the F
s
can be written as follows:

The Fsd of the damper is calculated by:

The F se of the airbag is calculated based on the model of the air suspension in Figure 2(a) and (b) as follows:
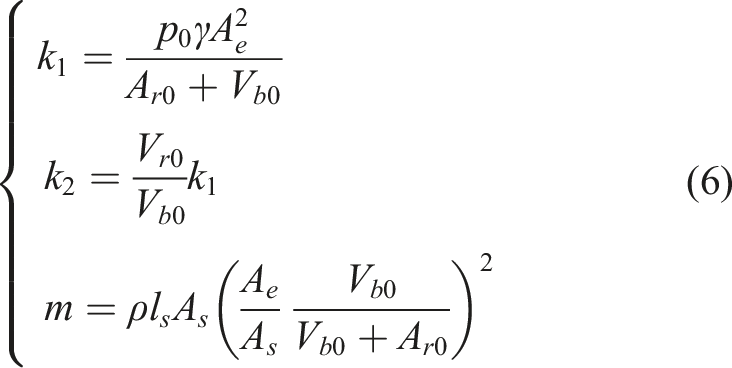
In the existing studies on the passive air suspension systems,4,5 based on the dynamic parameters of the air suspension in Figure 2(a) including the volume V
b
, pressure p
b
, and effective area A
e
of the airbag; the reservoir volume V
r
and pressure p
r
; and the air mass m
s
, the pipe length l
s
, and the pipe cross-sectional area A
s
, the lumped parameters of the air suspension in Figure 2(b) were calculated by:6,7,15
Based on the basic parameters of k1, k2, and m determined in equation (6), the F
se
of the airbag could be expressed as follows:
6

By combining equations (5) and (7), the F
s
in equation (4) can be rewritten by:

In the studies on semi-active air suspension systems, researchers mainly control the damping coefficient because the control of the damping coefficient is not only easy to implement but also obtains significant efficiency.9–11,16 Very few studies are interested in controlling the stiffness of the airbag. Accordingly, this study focuses on solving three basic problems of the control air suspension including the control of the damping coefficient c
sd
, the control of the stiffness of the airbag via the control of the damping coefficient c
sa
in the valve, and the combined control of both c
sd
and c
sa
to evaluate the isolating effectiveness between them. Three control cases of F
ctrl
are defined as follows: Case 1: Controlling the c
sd
, Case 2: Controlling the c
sa
, Case 3: Controlling both the c
sd
and c
sa
.
Equation (8) with three control cases are then used to simulate and assess the isolating effectiveness of the tractor-trailer air suspensions.
Oscillating excitation and evaluation index
Oscillating excitation source
The tractor-trailer is mainly moved on the highways with its random surface, thus, to establish the random excitation of the pavement, the pavement’s power spectral density (PSD) is used to describe the pavement unevenness. The pavement is divided into 8 levels, from A-level to H-level. The formula of pavement’s PSD is written by:14,17


The filtered white noise method has been used to simulate the pavement unevenness, and the above equation (10) has been simplified and differentiated to obtain the time domain model of the pavement as follows:

The cut-off spatial frequency n1 under pavement unevenness is 0.01 m−1. Corresponding to the ISO 8068,
18
the four types of the pavement including ISO B-class, C-class, D-class, and E-class are then used to establish the random excitation of the pavement. Their random pavements built at a speed of 60 km/h are shown in Figure 3. Road roughness built from ISO 8068: (a) Road surface of B, C, D, and E-level and (b) combined road surface between B, C, D, and E-level.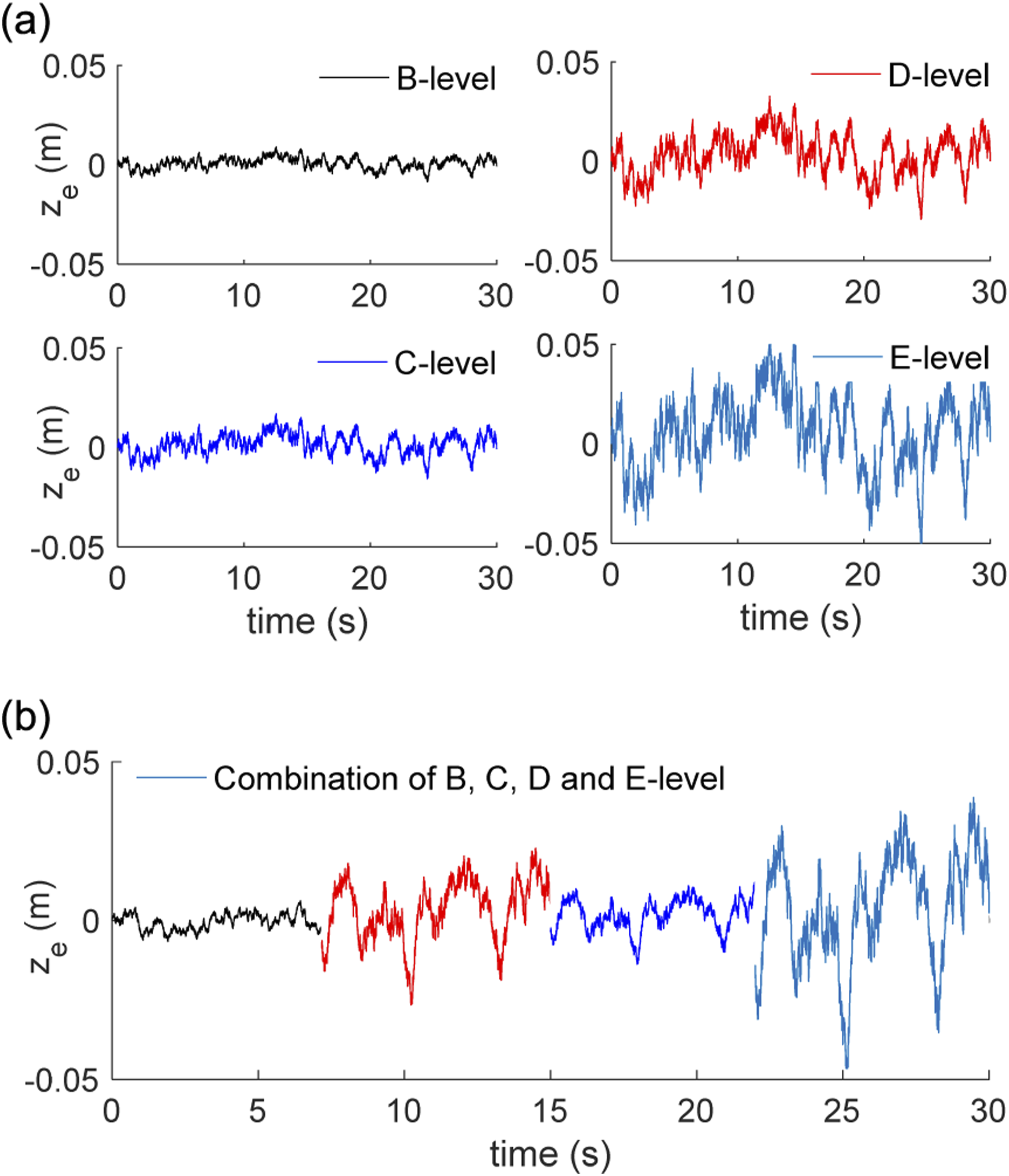
Evaluation index
Vehicle vibrations not only affect the durability of the vehicle’s components but also greatly affect the comfort of the vehicle, which has a very negative impact on the driving performance and handling of the driver. In existing studies, to evaluate the influence of vehicle vibrations, the root-mean-square acceleration index of the vehicle is mainly applied to quantitatively calculate the acceleration response.13,16,19 From there, its influence on the driving performance and handling ability (DP-HA) of the driver is considered. In this study, the two accelerations of the tractor-driver in the vertical and pitching directions directly affect the DP-HA of the driver, so they are used as evaluation indicators. Their root-mean-square values are calculated by:
19
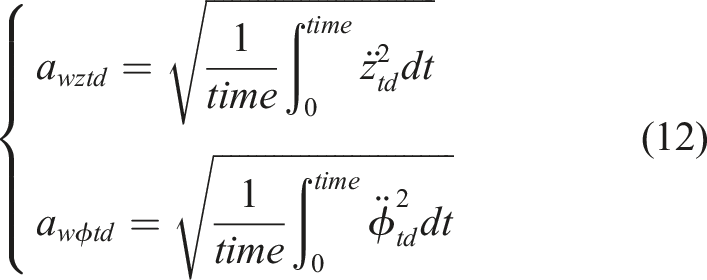
The aim of this study is to improve the driving performance and handling ability of the driver via reducing both a wztd and a wϕtd .
Control model design of suspension system
Designing fuzzy controller for air suspension
In modern control methods, the fuzzy controller (FC) is a multi-objective control model with simple design and easy to apply. However, the control efficiency of FL depends greatly on its control rules, while it is very difficult to determine these control rules.10,11,16 To solve this limitation, based on the control model of the system, a genetic algorithm program is applied to optimize the control rules to suit the control model.
To control the air suspension of the tractor-trailer, two damping parameters can be controlled including the c
sd
of the damper and the c
sa
of the valve in the air pipe. Thus, FC can be designed to control the damping value of u = c
sd
in Case 1, or u = c
sa
in Case 2, or both u = {c
sd
, c
sa
} in Case 3. The optimization of the control rules and controlling the air suspension of the tractor-trailer is performed as follows: To achieve high efficiency of FC on all different road surfaces, under the input excitation of the road surface combined by B, C, D, and E-level in Figure 3(b), the vehicle’s vibration model established in Matlab/Simulink is then simulated to calculate the initial values of a
wztd
and a
wϕtd
. Based on these initial values and the input signals of the air suspension (speed and deformation), the genetic algorithm program then performs the optimization of the control rules in FC. Based on the optimized control rules and two input values of the displacement and speed of the air suspensions (z and dz/dt), FC then calculates the most accurate and optimal control value of u to control the tractor-trailer’s air suspension. The combined control model is depicted in Figure 4. Combined control models of tractor-trailer air suspension.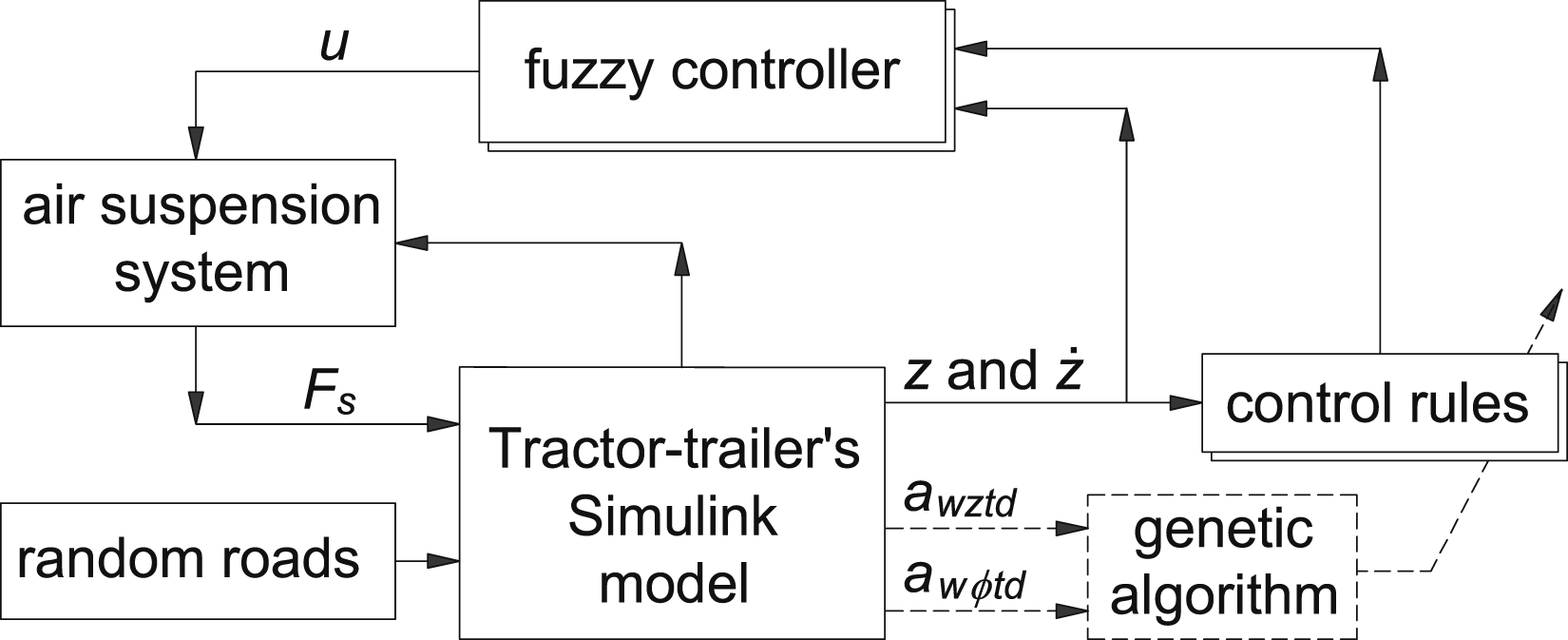
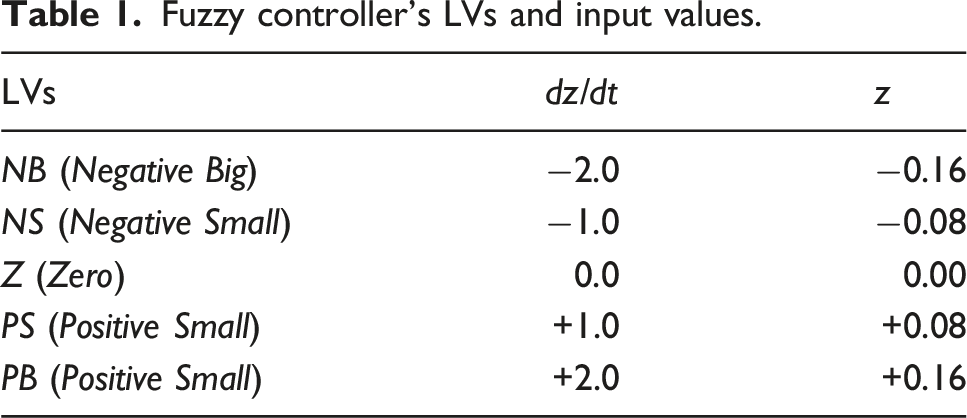
To build the FC model, the linguistic variables (LVs) of the input and output signals need to be defined. Based on the initial reference parameters of the tractor-trailer and the control model using the air suspension system,
13
the LVs of the input signals are listed in Table 1 and the LVs of the output signals are provided in Table 2. Based on these LVs, a Triangular function with its membership-degree varied from 0 to 1 is applied to calculate the output values based on the input values, the control rules, and the centroid method of the minimum function Mamdani.
20
Herein, the FC’s initial control rules are built by: (1) if z is NB and dz/dt is NB then u is B, (2) if z is NB and dz/dt is NS then u is S, … (25) if z is PB and dz/dt is PB then u is B. Fuzzy controller’s LVs and input values. Fuzzy controller’s LVs and output values.

In order to enhance the performance of the FC, the control rules in FC are also optimized based on the genetic algorithm program. The theory of the genetic algorithm program has been defined by searching a vector a = [a1, a2] T to obtain the minimum function of J(a) = [a wztd , a wϕtd ].16,21,22 Where, a1 and a2 are the input and output vectors of the LVs encoded by a1 = [NP, NS, Z, PS, PB] = [0, 1, 2, 3, 4] and a2 = [S, MS, M, MB, B] = [5, 6, 7, 8, 9]. Besides, each gene in a1 and a2 are randomly chosen from 0 to 4 and 5 to 9. The initial population of the genetic algorithm program has been set up by 250.
To obtain the objective functions of J(a)min = [a
wztd
, a
wϕtd
], two fitness parameters of G1 and G2 are proposed to compute the convergence region J(a)min as follows:
22

The goal of optimization is to find the optimal control rules in FC to achieve the minimum values of G1 and G2. To achieve these goals, the genetic operation including the mutation probability, crossover probability, and evolutionary generations are set up by 0.05, 0.95, and 1500, respectively. The combined model between the genetic algorithm program and FC are shown in Figure 5. Combined model of genetic algorithm and FC.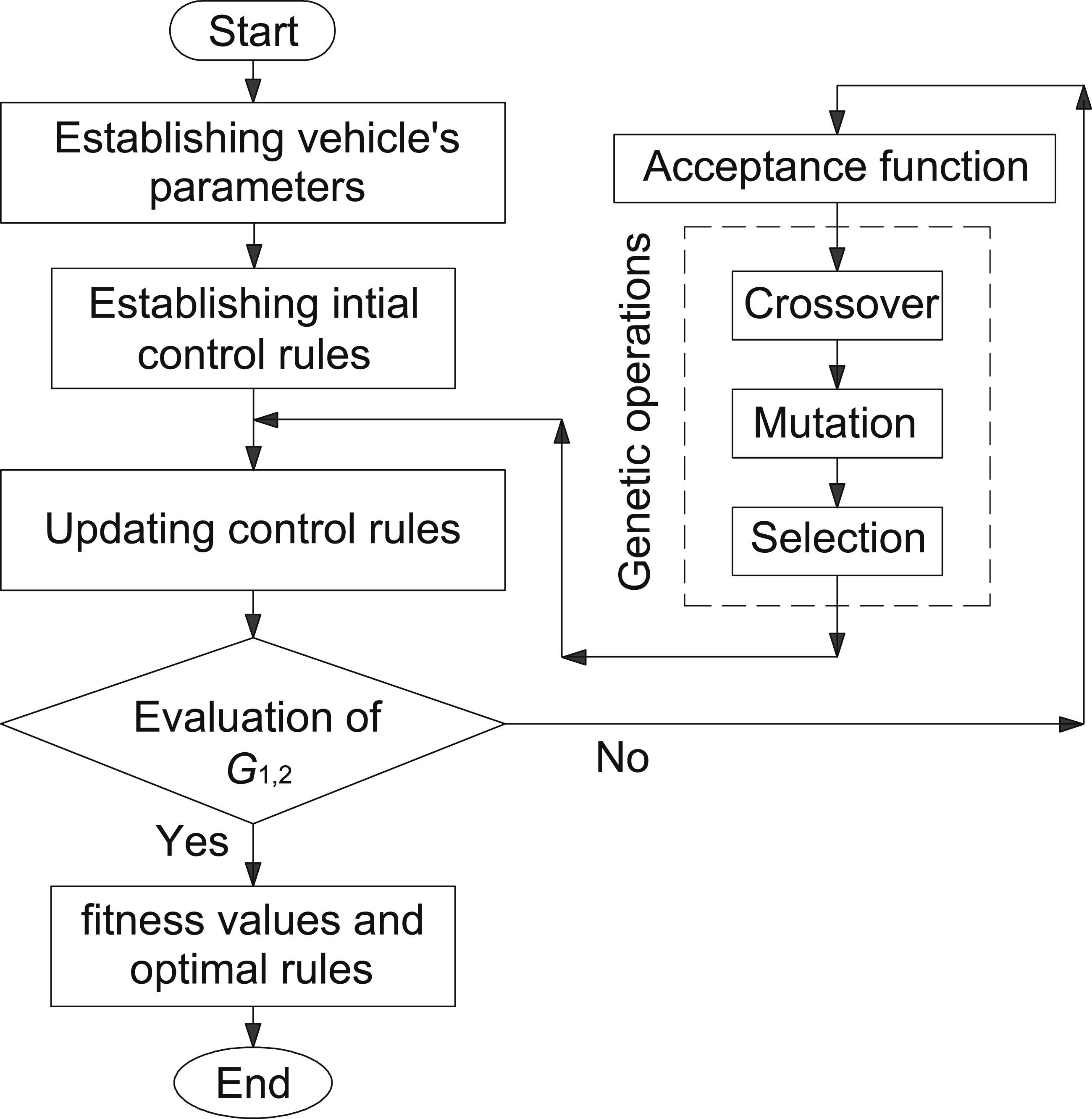
Optimal results
Lumped parameter of a tractor-trailer.

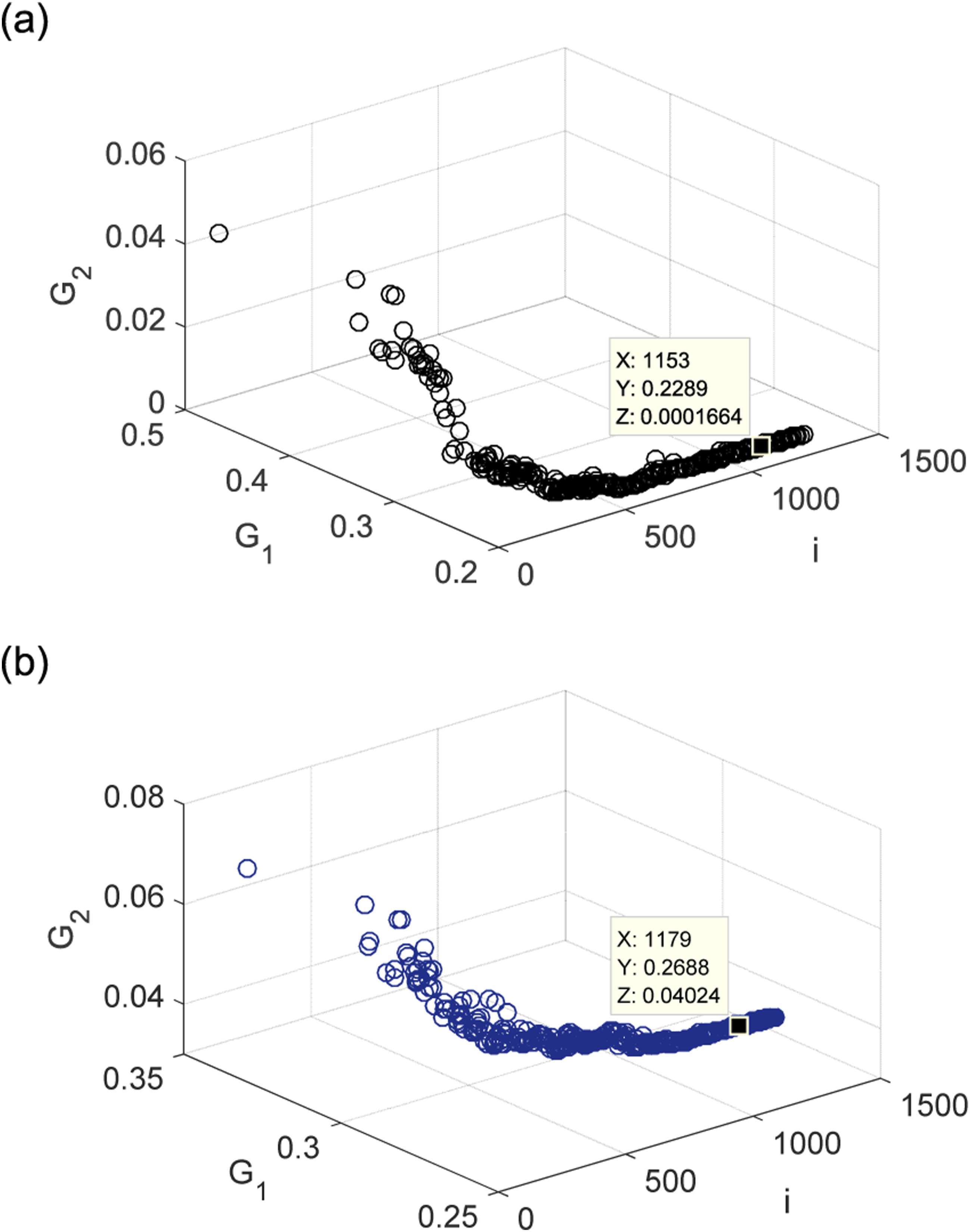
(a) Optimal result of Case 1 and (b) optimal result of Case 2.
Optimization of control rules in Case 1.

Optimization of control rules in Case 2.

These optimal control rules are then used to design the fuzzy optimal controller to control the values of c sd and c sa in the cases of Case 1, Case 2, and Case 3.
Simulation and analysis result
Performance under a simulation condition
Based on the control rules optimized, the tractor-trailer’s model is then simulated when the tractor-trailer is moving on the road surface of C-level at 60 km/h to evaluate the control performance of the c
sd
in Case 1, c
sa
in Case 2, and both c
sd
and c
sa
in Case 3. The control results have been presented in Figure 7(a) and (b). (a) Vertical acceleration and (b) pitching acceleration of tractor-driver on the road surface of C-level.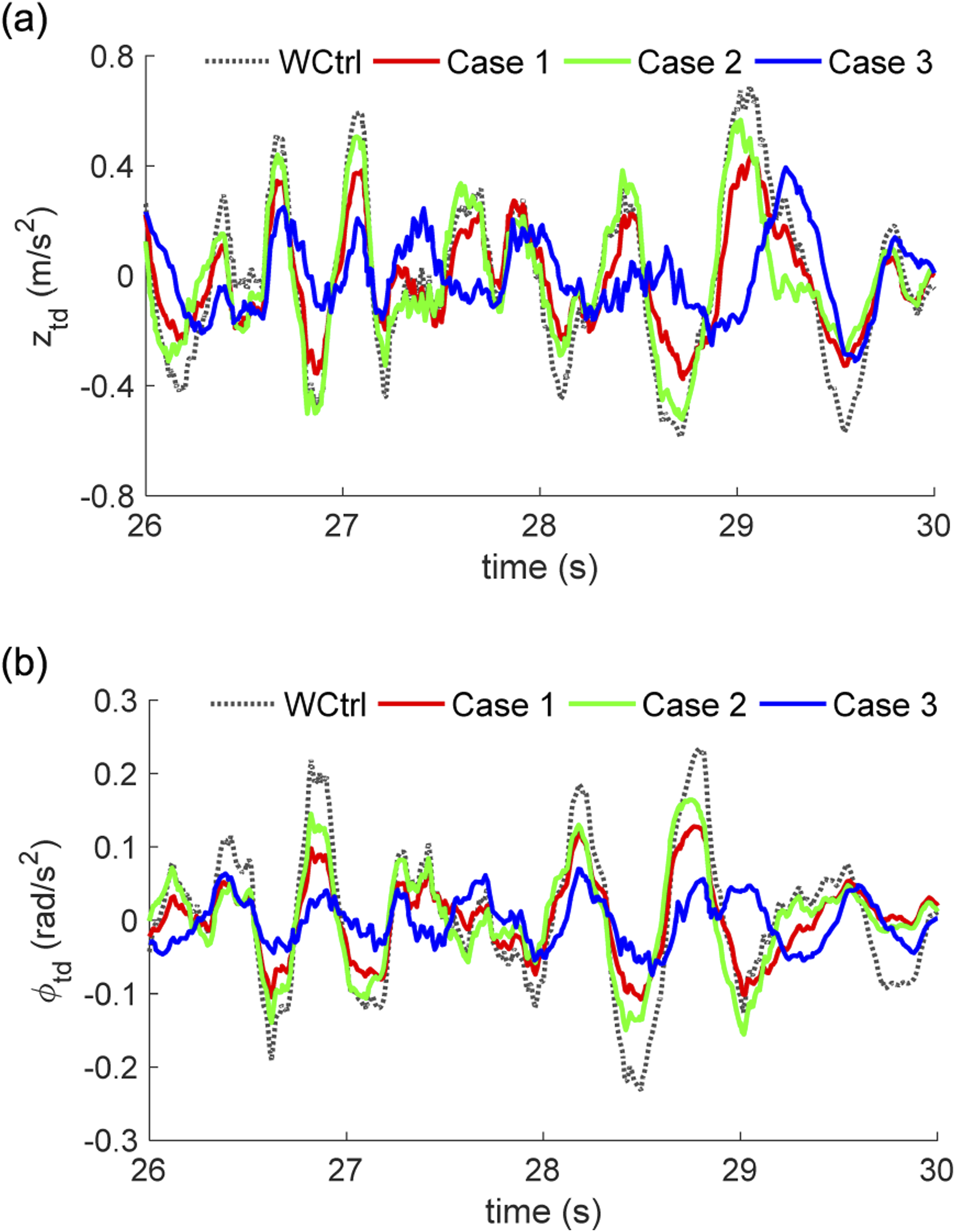
The oscillation responses in the time domain of the tractor-trailer in Figure 7 show that both the vertical and pitching accelerations of the tractor-driver with the csd and csa controlled in all cases are strongly reduced in comparison without control (WCtrl). This means that the driving performance and handling ability of the driver are improved by using the control air suspensions of the tractor-trailer. Besides, the comparison results between the c sd and c sa controlled in the same Figure 7 indicate that the vertical and pitching accelerations of the tractor-driver using the c sd controlled are lower than using the c sa controlled under the same simulation condition. This may be because the damper has the effect of damping the oscillation, while the stiffness of the airbag has the ability to reduce and absorb the oscillation energy. This is also the reason why most vehicle control suspension systems always use the damping coefficient as the control object.9–11 To further expand the scope of research, both parameters of c sd and c sa are also controlled. The results in Figure 7 presented that the tractor-driver’s oscillation responses with Case 3 are smaller than those of both Case 1 and Case 2.
The quantitative calculation results of the tractor-driver’s acceleration responses in Figure 8 show that a
wztd
and a
wϕtd
with the c
sd
controlled are reduced by 31.1% and 44.9% compared to WCtrl and reduced by 14.9% and 18.3% compared to the c
sa
controlled. Besides, the a
wztd
and a
wϕtd
with both the c
sd
and c
sa
controlled are reduced by 30.7% and 36.7% in comparison with the c
sd
controlled. Therefore, the driving performance and handling ability of the driver using the c
sd
controlled is better than using the c
sa
controlled while the driving performance and handling ability of the driver using both the c
sd
and c
sa
controlled is the best under a working condition of the tractor-trailer. Comparison result of the root-mean-square acceleration between of Case 1, Case 2, and Case 3. (a) Vertical accleration and (b) pitching accleration of tractor-driver.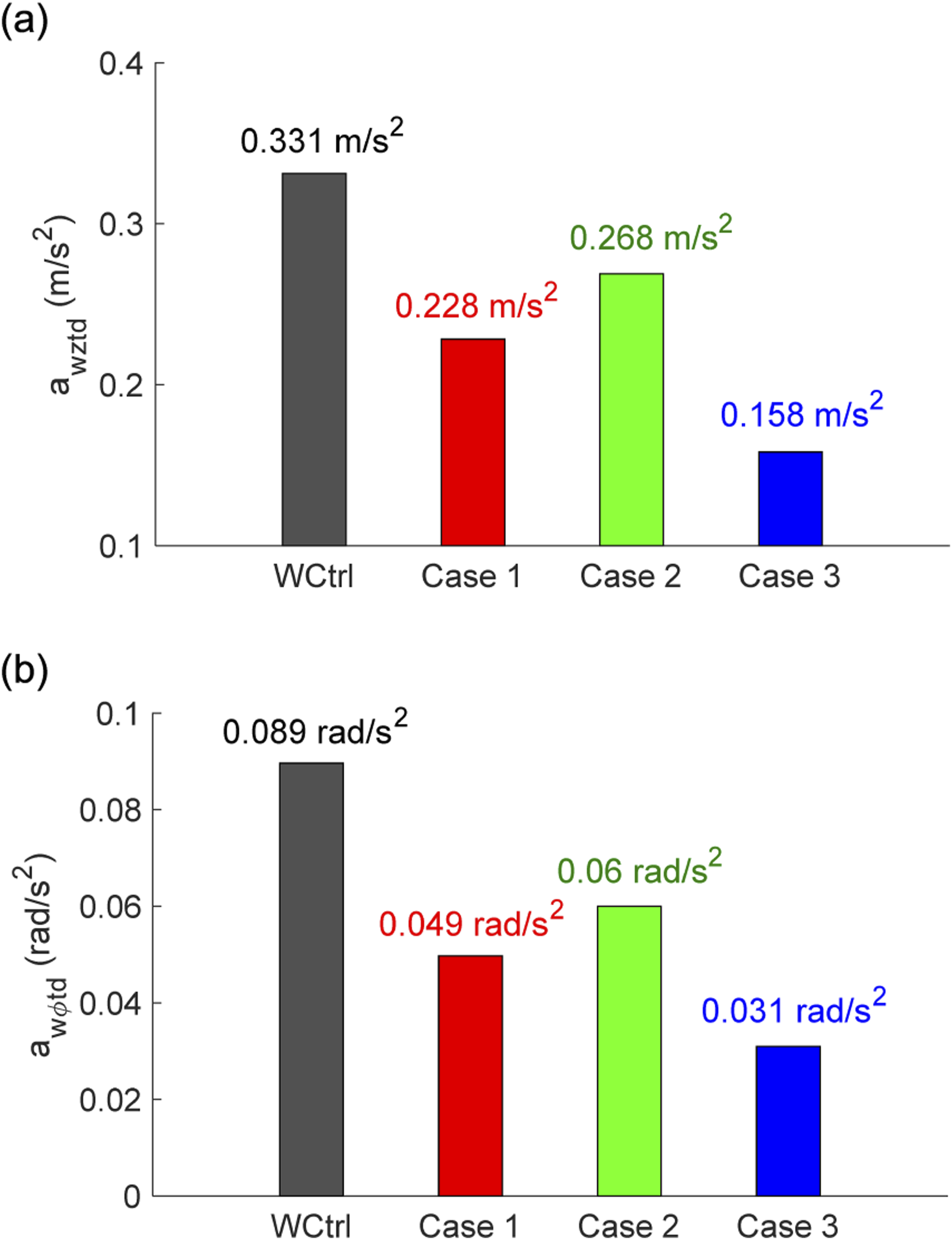
Performance under various speeds and road surfaces
When the different working conditions of the tractor-trailer such as the speed and random road surface are changed, the control performance of the c
sd
and c
sa
can be also changed. There fore, the different speeds of the tractor-trailer changed from 10 to 100 km/h when the vehicle is moving on the various road surfaces of B, C, D, and E-level are simulated, respectively. The results of the a
wztd
and a
wϕtd
with various control cases are plotted in Figure 9. Root-mean-square accelerations under various speeds and road surfaces: (a) Vertical acceleration and (b) pitching acceleration of tractor-driver.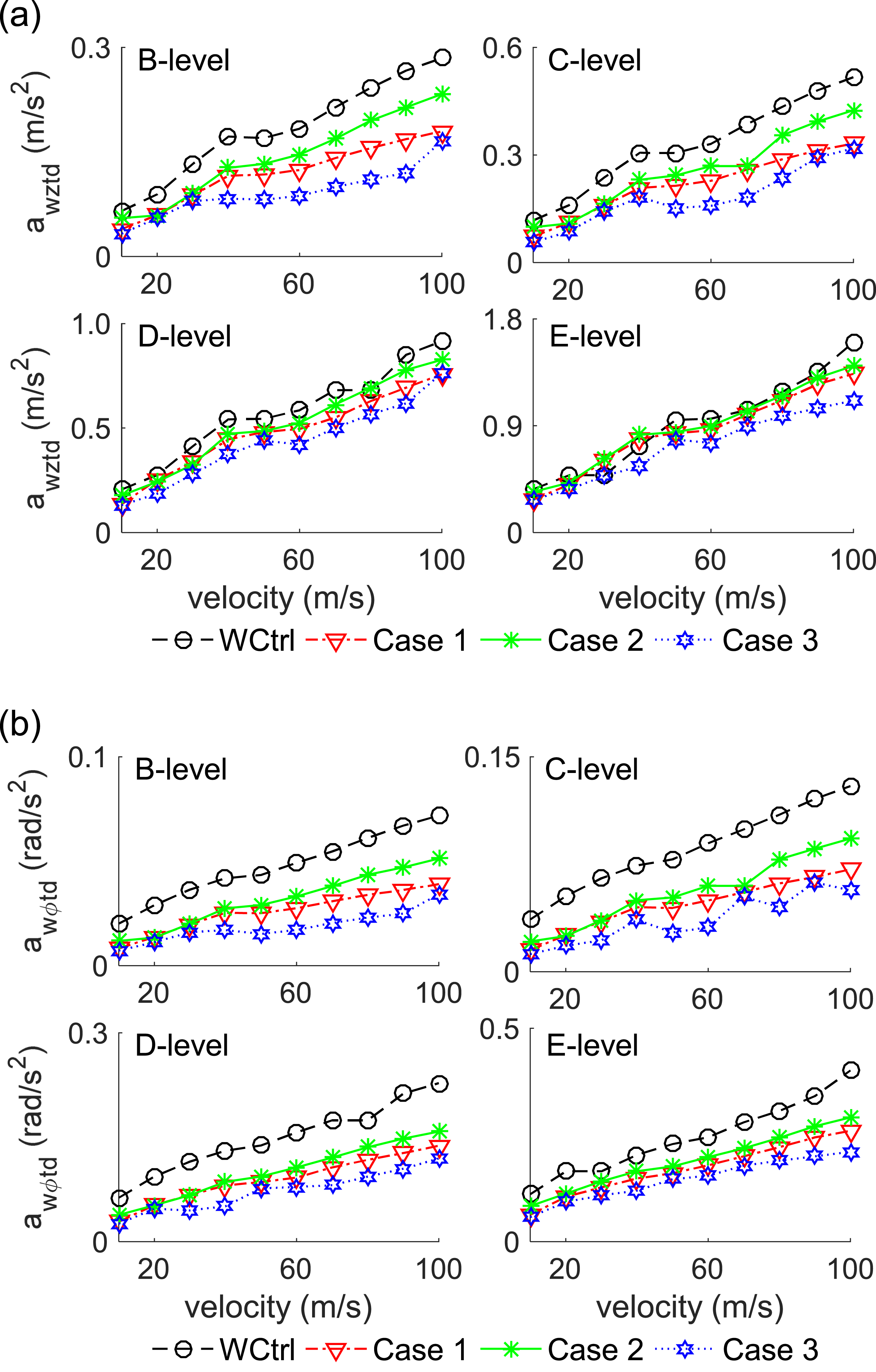
The result shows that both the a wztd and a wϕtd are strongly increased by the increase of the moving speed as well as the height of road surface. Thus, both the random road surface and moving speed of the tractor-trailer affect greatly the driving performance and handling ability of the driver. However, with all different cases of Case 1, Case 2, and Case 3 applied, the results of the a wztd and a wϕtd with the c sd controlled are always lower those of the c sd controlled. Simultaneously, the a wztd and a wϕtd with both the c sd and c sa controlled are the smallest under all different simulation conditions. This means that their control performance is quite stable. These simulation and analysis results further reinforce that the performance and stability of Case 3 in improving the driving performance and handling ability of the driver is the best.
Performance under various load conditions
In the working process of the tractor-trailer, the load of the trailer-truck can be varied. This may also affect the control performance of the tractor-trailer air suspensions. Thus, three load cases including the half load (50%), full load (100%), and over load (50%) of the trailer-truck are also simulated under the different roads of B, C, D, and E-level. The a
wztd
and a
wϕtd
with various load cases are computed and presented in Figure 10. Root-mean-square accelerations under various load conditions: (a) Vertical acceleration and (b) pitching acceleration of tractor-driver.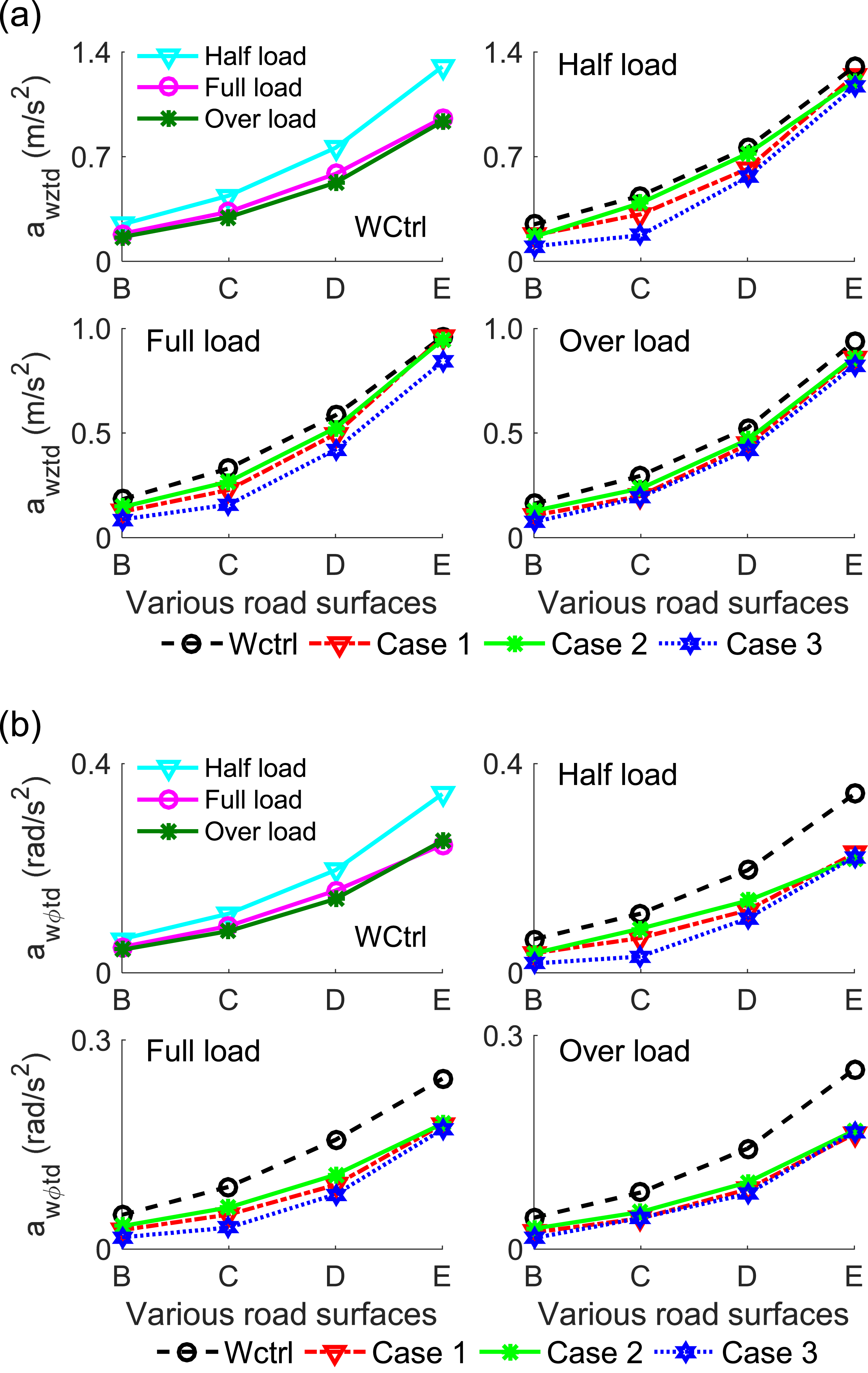
Similarly, under the excitation of all different road surfaces of B, C, D, and E-level, both a wztd and a wϕtd in all the WCtrl, Case 1, Case 2, and Case 3 are also strongly increased with the increase of the hight of the road surface. This is due to the effect of the road surface roughness.13,14 Accordingly, the more the road surface quality decreases, the driving performance and handling ability of the driver also decreases. Under the change of the trailer-truck load, the first figure in Figure 10(a) and (b) of the tractor-trailer using WCtrl shows that both a wztd and a wϕtd in the half load used are strongly increased compared to the full load used while those values in the over load used are significantly reduced in comparison with the full load used. This result implies that to improve the driving performance and handling ability of the driver, the trailer-truck’s half load mode should be used sparingly.
With three control cases applied, the remaining figures in Figure 10(a) and (b) indicate that the a wztd and a wϕtd with the c sd controlled are lower than those of the c sa controlled while these values with both the c sd and c sa controlled are also the lowest under all cases of the half load, full load, and over load of the trailer-truck. However, when the tractor-trailer is moving on the road surface of E-level and under the over load condition of the trailer-truck, the performance of the c sd and c sa controlled is significantly reduced compared to the c sd controlled. Basically, the performance and stability of Case 3 in improving the driving performance and handling ability of the driver is also the best under the change of the trailer-truck load.
Conclusions
This study successfully developed a combined control model between the fuzzy controller and genetic algorithm program to control the air suspension system for the tractor-trailer to improve the driving performance and handling ability of the driver. Besides, three control approaches of the c sd controlled, c sa controlled, and both c sd and c sa controlled are also applied to evaluate the control efficiency between them. The air suspensions using the different control approaches improve the driving performance and handling ability of the driver better than without the control.
Under all various operation conditions of the tractor-trailer, the control performance of the c sd is better than the c sa . Thus, this may be the reason that the control approach of the vehicle suspesnion system using the c sd is largely researched and applied in comparison with using the c sa . There are very few studies on air suspension system that consider its stiffness control.
By combining both control methods of c sd and c sa to control the air suspensions of the tractor-trailer, the result shows that its control performance is better than both control approaches of the c sd controlled and c sa controlled under various simulation conditions of the tractor-trailer. However, with both the c sd and c sa controlled, the controller structure can become complex and expensive. Therefore, this study mainly focuses on introducing a new combined control method of the c sd and c sa controlled in improving the driving performance and handling ability of the driver. Simultaneously, the control efficiency between different cases is analyzed in detail. These research results can supplement the current specialized knowledge that is lacking.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.