
Abstract
This paper introduces the Scuba Diver Optimization Algorithm (SDOA), a state-regulated population-based metaheuristic for constrained and continuous optimization. The main contribution is an agent-level oxygen-state regulator that jointly controls search stage, movement operator, perturbation amplitude, local refinement, elite communication, and reset pressure. In contrast to iteration-level schedules that impose a single exploration-to-exploitation trajectory on the entire population, SDOA allows candidate solutions to occupy different behavioral stages within the same iteration. This asynchronous state allocation is intended to support global coverage, boundary-sensitive exploitation, and diversity recovery through one search-governance mechanism. The empirical evaluation uses an integrated validation corpus comprising four constrained engineering design problems–welded beam design, tension/compression spring design, car side-impact design, and speed reducer design–and twenty-three standard mathematical functions representing unimodal, multimodal, discontinuous, penalized, and fixed-dimensional landscapes. The experimental protocol reports benchmark formulations, parameter settings, sensitivity evidence, repeated-run dispersion where available, confidence intervals, runtime diagnostics, and mechanism-level interpretation. The findings are therefore interpreted in terms of feasibility, robustness, computational cost, and comparative standing, rather than isolated best-run values. Overall, SDOA is positioned as a transparent state-regulated optimizer whose principal contribution is the coordinated regulation of feasibility recovery, exploitation control, and diversity preservation within a coherent internal state model.
Keywords
Introduction
Metaheuristic optimization has become a central computational approach for problems in which objective functions are nonlinear, constraints are strongly coupled, and reliable derivative information is unavailable or impractical to obtain. These conditions arise frequently in mechanical design, controller tuning, power-system scheduling, feature selection, parameter estimation, and other intelligent engineering applications. During the past decade, both established swarm-intelligence methods and newer bio-inspired optimizers have been extended to increasingly difficult constrained search spaces.1,2
Despite these developments, an important methodological limitation persists. Many optimizers still regulate exploration and exploitation through externally imposed schedules, fixed coefficients, or weakly adaptive heuristics. Such mechanisms may be adequate on smooth landscapes, but they can become fragile when the feasible region is narrow, disconnected, or concentrated near active constraints. In such settings, an optimizer must improve the objective while also recovering feasibility, preserving population diversity, and preventing premature convergence. Classical engineering benchmarks such as welded beam design, tension/compression spring design, car side-impact design, and speed reducer design continue to expose these difficulties because they combine nonlinear objective functions with restrictive constraint boundaries.3–6
This study develops the Scuba Diver Optimization Algorithm (SDOA) as a constrained-optimization framework governed by an interpretable internal state. Each candidate solution is modeled as a diver whose remaining oxygen determines the extent of global exploration, the transition to regional refinement, and the need for resurfacing or reset. Oxygen is therefore used as an agent-level regulator rather than as a purely metaphorical coefficient: it links movement selection, step-size control, elite guidance, local search, and diversity recovery through a single evolving state variable.
SDOA is examined through an integrated validation corpus. Four constrained engineering problems–welded beam design (WBD), tension/compression spring design (TSD), car side-impact design problem (CSIDP), and speed reducer design (SRD)–are used to assess feasibility preservation, mixed-variable handling, and behavior near active constraints. Twenty-three standard mathematical functions complement these cases by testing exploitation accuracy, multimodal exploration, separability, nonseparability, discontinuity, and attraction-basin sensitivity. The mathematical functions are therefore treated as the landscape-generalization component of the empirical design, not as a detached auxiliary experiment.
The paper makes six specific contributions. First, it formulates SDOA as a coherent state-regulated optimizer incorporating oxygen decay, depth-stage mapping, staged movement operators, elite preservation, and selective reset. Second, it distinguishes oxygen-state regulation from ordinary adaptive schedules by showing how a single internal state coordinates operator selection, perturbation amplitude, elite communication, reset behavior, and asynchronous stage occupancy. Third, it provides a unified empirical assessment across constrained engineering benchmarks and the 23-function mathematical suite, thereby broadening the evidence beyond a small set of specialized design cases. Fourth, it improves equation transparency by auditing benchmark formulations, variable types, bound handling, and feasibility rules. Fifth, it reports parameter calibration and sensitivity evidence that separates computational budget from behavioral regulation. Sixth, it organizes the results around objective value, feasibility, dispersion, statistical uncertainty, runtime, and mechanism-level interpretation, yielding a balanced assessment rather than a claim of universal dominance.
The contribution is evaluated through six connected criteria: methodological distinctiveness relative to adaptive and stage-based metaheuristics; feasibility preservation under nonlinear constraints; statistical stability where repeated-run evidence is available; comparative competitiveness within the reported benchmark literature; robustness across heterogeneous mathematical landscapes; and transparency in parameterization, runtime, and implementation.
Related work and research gap
Recent metaheuristic research has followed two related directions. One direction refines established families such as particle swarm optimization, differential evolution, firefly-based search, and hybrid evolutionary methods. The other introduces newer nature-inspired algorithms, including EABOA, KOA, the Rabbit and Turtle Algorithm, the Search and Rescue Algorithm, and other metaphor-driven optimizers.7–10 Comprehensive reviews indicate that these methods can report strong best-case values, but their relative advantages are often problem dependent and sensitive to parameter tuning.1,4
Welded beam design has long served as a compact but demanding benchmark because its cost-minimization objective is shaped by stress, deflection, and buckling constraints. Earlier methods, including genetic algorithms, harmony search, simulated annealing, and firefly optimization, demonstrated that feasible low-cost designs can be found, but also showed that the search process is sensitive to constraint handling and local stagnation.11,12 The WBD results in this study indicate that SDOA is competitive on this benchmark, although it is not universally best; thus, WBD is treated as a robustness test rather than as a selective showcase.
Tension/compression spring design has generated an especially dense comparison literature because many optimizers have been tested on a three-variable problem with four nonlinear constraints. The central lesson from this literature is nuanced: small objective-value differences can substantially change rank ordering, but they do not necessarily imply meaningful differences in reliability. Recent studies show that many methods cluster within a narrow feasible region, making stability, speed, and reproducibility more informative than rank alone.4,7,8,13
Car side-impact design is structurally more demanding because it combines eleven variables, mixed continuous-discrete choices, and ten surrogate crashworthiness constraints. Standard swarm and evolutionary methods can obtain attractive objective values, but the distinction between feasible and infeasible solutions is critical because some optimizers approach low weight only by violating safety constraints. Diversity-guided PSO variants and firefly-based mixed-variable formulations have attempted to address this difficulty, yet constraint-aware stability remains a central issue.3,5,12
Speed reducer design remains one of the most stringent constrained engineering benchmarks because the optimum is close to several active constraints and one variable is integer-valued. Deterministic reformulations and many modern metaheuristics have been reported for this problem, including SGO-DE, hybrid JADE-Sine-Cosine variants, AOACS, and recent comparative studies.6,14–16 Even when best objective values are similar, feasibility reliability and variance across runs continue to distinguish robust methods from opportunistic best-run outcomes.
Across these problem classes, the unresolved issue is not simply whether another optimizer can produce a marginally lower best value. The deeper gap concerns search governance. Many recent algorithms combine diversification, intensification, elite guidance, mutation, and restart, but these components are often introduced as separate heuristics coordinated by iteration counters or manually selected coefficients. A constrained metaheuristic is more reproducible when such behaviors are regulated by a transparent internal state. SDOA addresses this gap by using oxygen as the central regulator of stage transitions, step-size behavior, elite communication, local refinement, and reset.
Positioning relative to adaptive, schedule-based, and feasibility-preserving metaheuristics
Many modern optimizers improve the exploration-exploitation balance through linearly decreasing coefficients, adaptive awareness probabilities, elite-guided crossover, Lévy perturbations, or hybrid local-search modules. These mechanisms can be effective, but they often adjust the intensity of a fixed movement rule rather than changing each search agent's behavioral regime. SDOA differs by allowing the oxygen state to select the movement family itself, including long-range exploration, bounded random walks, elite-guided refinement, non-uniform mutation, and reset.
In constrained engineering design, objective ranking alone can be misleading because attractive raw objective values may be associated with violated constraints. This issue is particularly important for CSIDP and SRD, where high-quality solutions lie close to active boundaries. Accordingly, the comparative discussion evaluates SDOA through objective value, feasibility status, convergence behavior, dispersion, and benchmark-specific standing.
Recent studies further reinforce the importance of robust benchmark design, adaptive search control, and hybrid intelligent optimization. Altay introduced the chaotic slime mould optimization algorithm and showed that chaotic control can strengthen exploration and global-search performance across benchmark and engineering problems. 17 Altay and Varol Altay later coupled an improved grey wolf optimizer with multilayer perceptron training, demonstrating the relevance of metaheuristic search to data-driven model optimization. 18 Their chaotic transient search optimizer further emphasized diversity enhancement, real-world engineering validation, and feature-selection applicability. 19 A broader comparative study of real-world engineering design problems also confirmed that algorithmic performance depends strongly on benchmark selection, constraint handling, and reporting protocol. 20 Recent QTJ studies similarly highlight hybrid metaheuristics, adaptive learning architectures, and data-driven intelligent frameworks in contemporary optimization and engineering-oriented computational intelligence.21–24
Recent comprehensive studies on new metaheuristic families further show that the field is moving beyond single-metaphor algorithm proposals toward taxonomy, hybridization, application-specific adaptation, and reproducible validation. The recent reviews of the Mountain Gazelle Optimizer, Artificial Rabbits Optimization, and Sand Cat Swarm Optimization are important in this respect because they classify algorithmic variants, hybrid forms, application domains, and open research directions, thereby emphasizing that new optimizers should be evaluated through transparent benchmark protocols rather than by metaphor alone.25–27 Application-oriented and hybrid metaheuristic studies make the same point from an empirical perspective: SCSOWOA has been adapted for generalized multilevel thresholding in multi-organ medical image segmentation, RSA-HGSO has been used for satellite-image segmentation in remote sensing, the Discrete Puma Optimizer extends continuous metaheuristic search to combinatorial optimization, and a multi-strategy Chimp Optimization Algorithm integrates several update mechanisms for global and constrained engineering problems.28–31 These studies clarify the methodological standard against which SDOA should be judged: the oxygen-state regulator must provide a reproducible search-governance mechanism supported by heterogeneous benchmark evidence, explicit parameterization, feasibility-aware evaluation, and cautious claims about comparative scope.
Competition-oriented benchmark suites are essential for assessing whether a metaheuristic generalizes across heterogeneous search landscapes. The CEC constrained real-parameter competitions formalize this concern through standardized functions, feasibility rules, and evaluation criteria for constrained single-objective optimization.32–34 The present study does not claim to reproduce a complete official CEC constrained competition. Instead, the available data correspond to the classical 23-function suite, which is used here as a landscape-diversity component independent of the four engineering geometries. The official CEC constrained suite is therefore identified as a necessary next-stage validation rather than as a completed claim in this manuscript.
Scuba diver optimization algorithm
State representation and initialization
Let
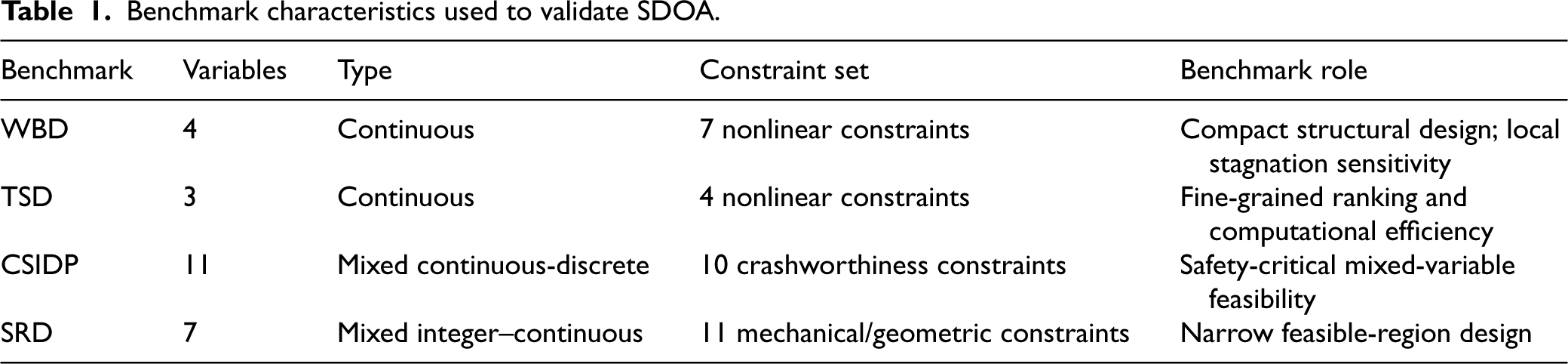
The benchmark families used to validate SDOA span compact continuous design, mixed-variable crashworthiness design, and mixed integer-continuous mechanical design. Their main characteristics are summarized in Table 1.
Benchmark characteristics used to validate SDOA.
Benchmark characteristics used to validate SDOA.
Table 1 shows that the validation set was not drawn from a single problem family. Instead, it spans compact continuous design, crashworthiness-constrained mixed-variable design, and mixed integer-continuous mechanical design. This breadth is important because it tests whether SDOA can preserve feasibility under substantially different search geometries rather than succeeding only on one favorable benchmark type.
The principal SDOA parameters and the ranges explored across the benchmark studies are summarized in Table 2.
SDOA control parameters.
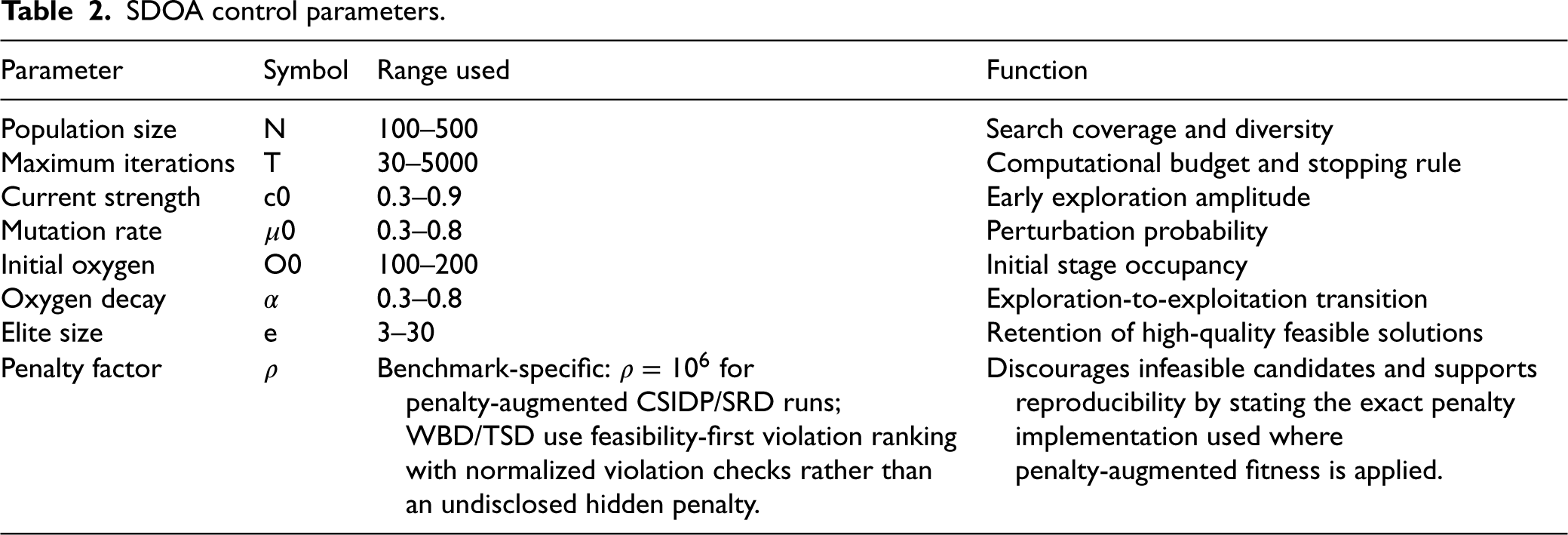
Table 2 shows that SDOA is controlled by a compact set of interpretable parameters rather than by a large collection of loosely connected heuristics. Population size and maximum iterations define search coverage and computational budget, whereas current strength, mutation rate, oxygen initialization, and oxygen decay determine the transition from exploratory movement to boundary-sensitive refinement. Elite size and penalty pressure stabilize convergence when the feasible region is narrow or constraint-active.
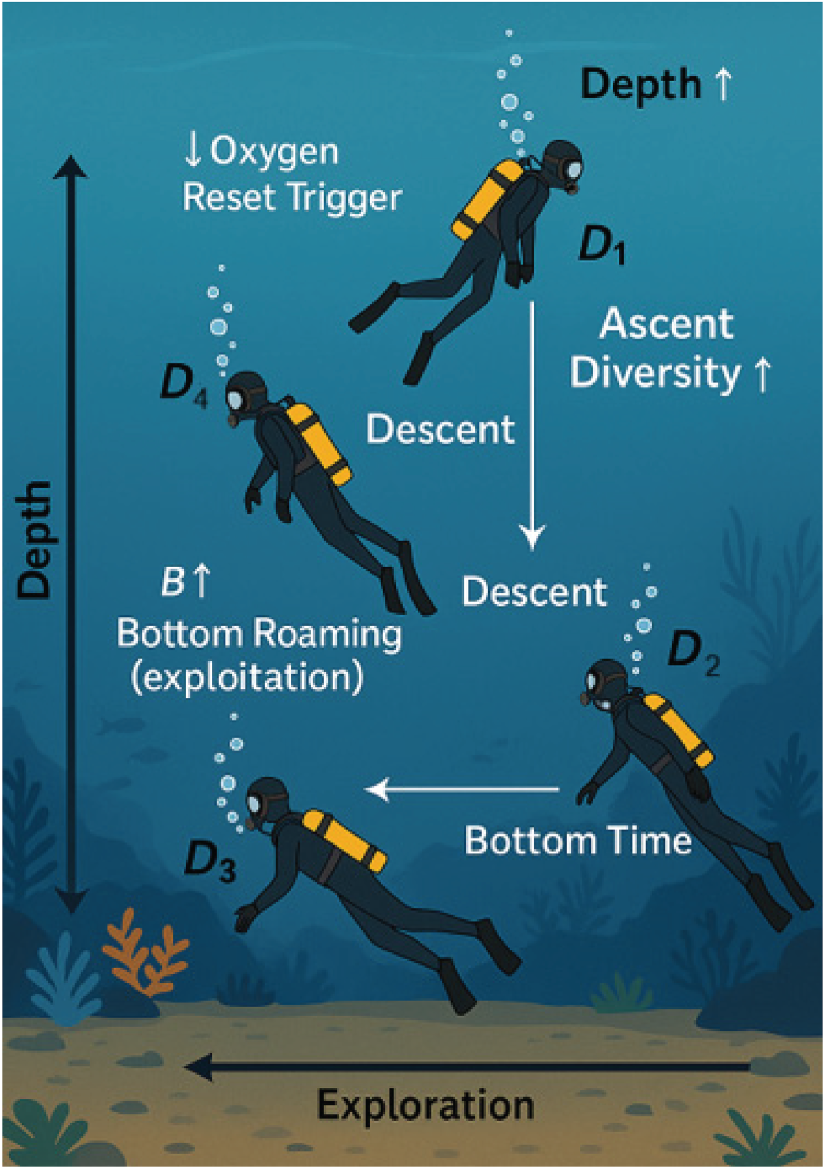
Figure 1 isolates the conceptual metaphor of SDOA by depicting the oxygen-regulated depth stages assigned to each diver. The diagram is separated from the procedural flowchart so that the behavioral meaning of D1-D4, oxygen decay, and reset is clear before the implementation is examined.
Oxygen-regulated depth stages in the scuba diver optimization algorithm.
As illustrated in Figure 1, oxygen is the organizing state variable of the method. High oxygen supports long-range exploration near D1, intermediate oxygen promotes guided regional search in D2, D3 emphasizes exploitation around promising solutions, and D4 represents low-amplitude refinement under increasing reset pressure. This staged interpretation explains how SDOA can approach narrow feasible boundaries while reducing the risk of premature collapse into a single local region.
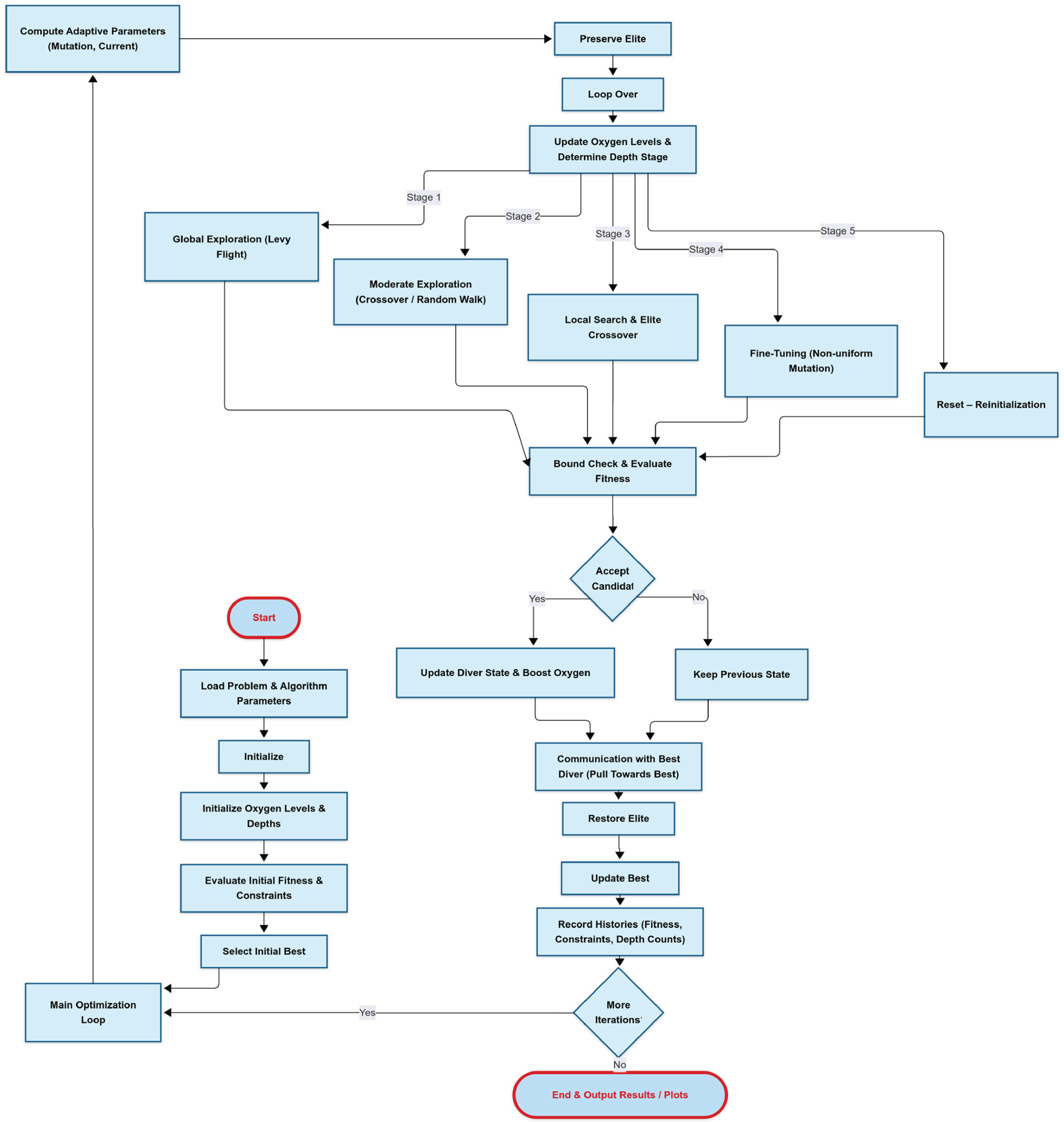
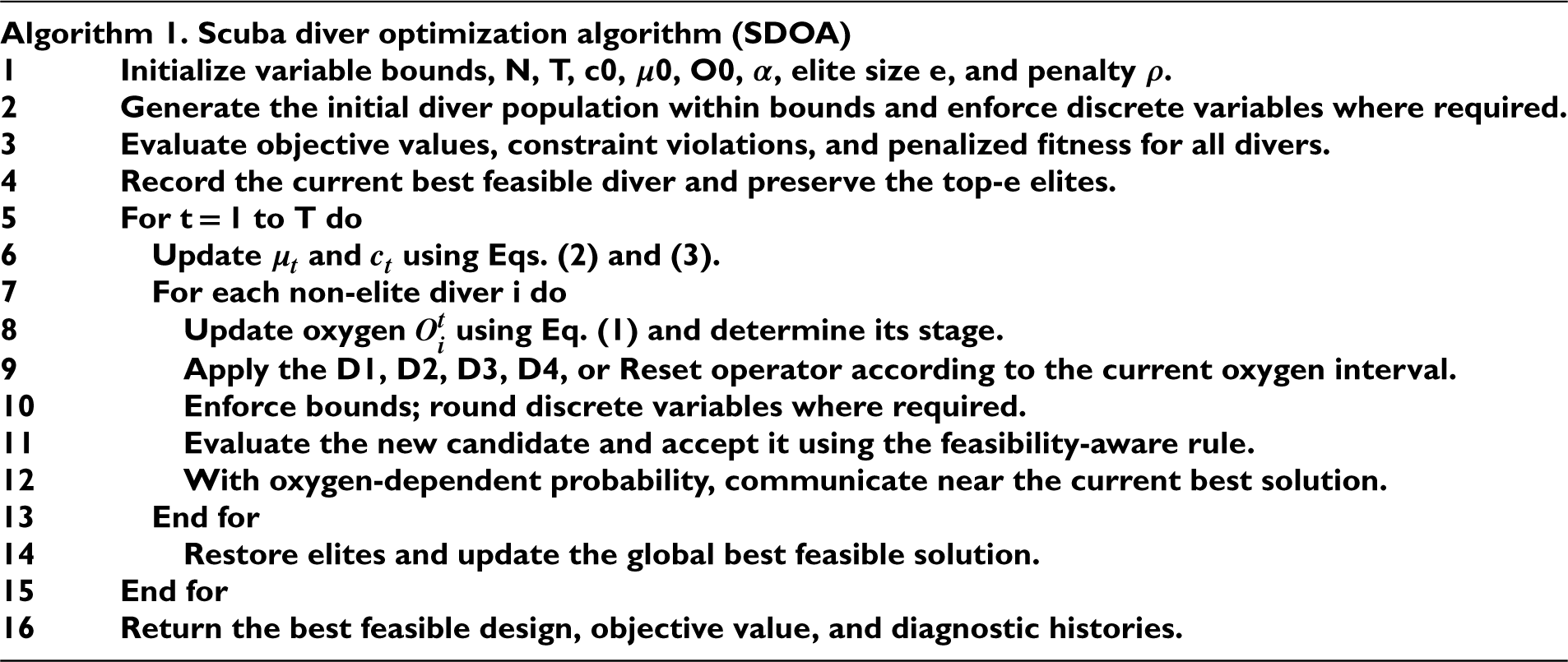
Figure 2 translates the conceptual diving metaphor into an executable optimization workflow. Separating the flowchart from the conceptual diagram clarifies the algorithmic sequence, from initialization and oxygen updates to stage-dependent operators, feasibility-aware acceptance, elite restoration, and termination.
Procedural flowchart of the scuba diver optimization algorithm.
As shown in Figure 2, SDOA is not a single-move swarm rule but a closed-loop procedure in which oxygen determines the active operator for each diver. The workflow couples parameter updates, stage selection, bound handling, feasibility-aware acceptance, communication with the best diver, and elite restoration. This structure explains the controlled progression from exploration to refinement observed in the benchmark analysis.
The first control law in SDOA is the oxygen-decay model:
Here, O0 is the initial oxygen level and alpha > 0 is the decay coefficient. High oxygen promotes broad exploration, whereas low oxygen induces cautious local refinement and, when necessary, reset. Two additional schedules regulate perturbation amplitude. The mutation rate decreases linearly according to
The quadratic decay produces a relatively rapid contraction of step size after the early exploratory phase, which is desirable for constraint-dominated problems.
Oxygen maps each diver to one of five depth stages. In the implementations consolidated here, the approximate thresholds are
Table 3 summarizes the state-regulated stage logic. The search does not switch abruptly from global to local behavior at a fixed iteration index; instead, each diver moves through oxygen-governed stages asynchronously. This enables broad coverage, targeted refinement, and diversity recovery to coexist within the same iteration.
Oxygen-regulated stages in SDOA.

Oxygen-regulated stages in SDOA.
Stage D1 performs long-range exploration through a heavy-tailed Lévy-like move:

Stage D2 replaces heavy-tailed jumps with bounded random walks:

Stage D3 emphasizes exploitation. A diver combines its current position with an elite or with the current best solution through linear crossover, followed by coordinatewise local search around the offspring. In compact notation,

Constraint handling is implemented through a penalty-augmented objective. For a minimization problem with objective 

Methodological distinctiveness, complexity, and reproducibility
The oxygen mechanism is not introduced as a metaphorical label for a standard decreasing coefficient. Methodologically, it functions as an internal state with multiple algorithmic consequences: it assigns each diver to a depth stage, selects the movement operator, scales perturbation amplitude, influences local-refinement intensity, triggers reset when search becomes unproductive, and regulates communication with elite solutions. This distinguishes SDOA from simple iteration-based schedules, in which a coefficient changes over time but does not determine the full behavioral regime of each agent.
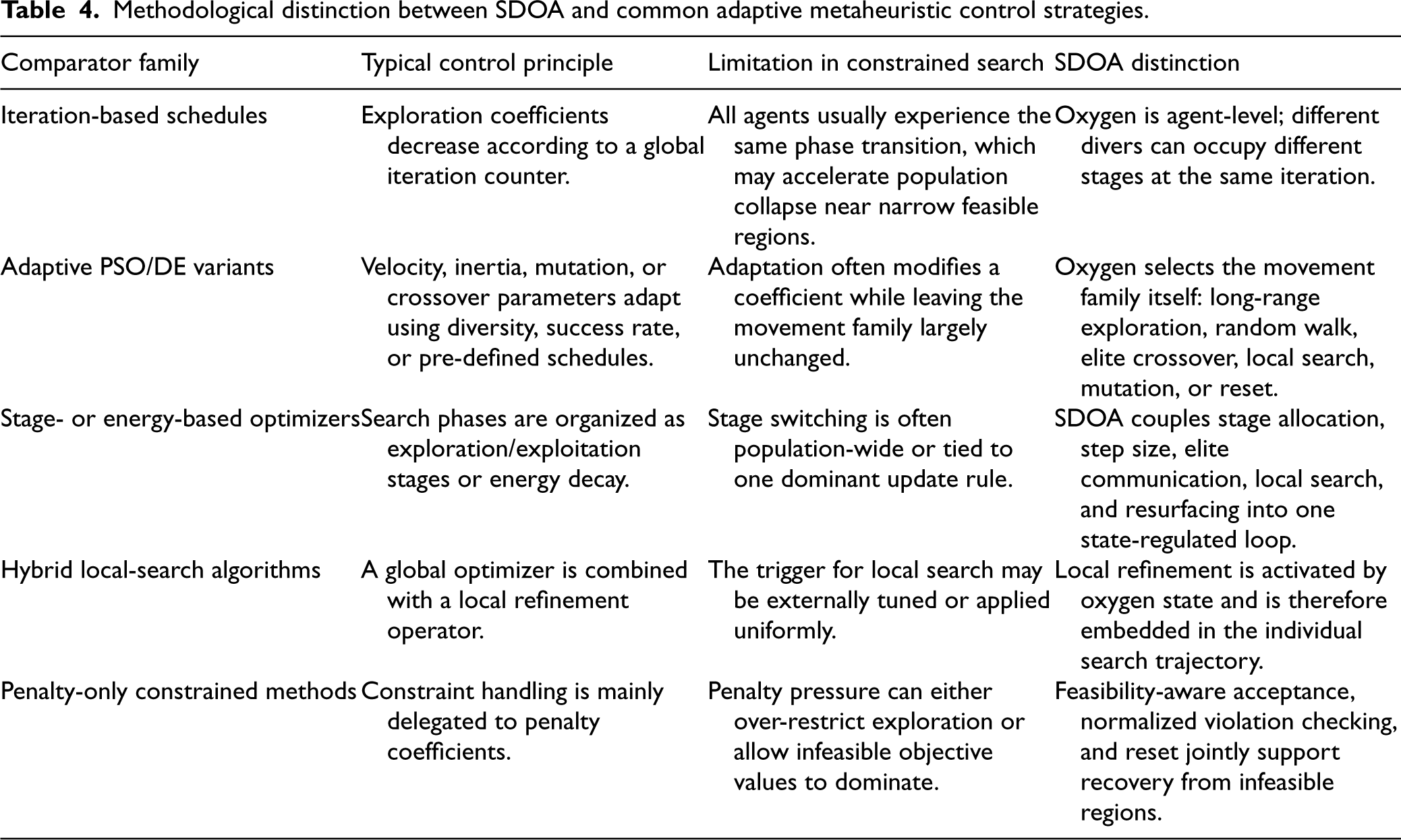
Table 4 clarifies this distinction relative to common adaptive or stage-based metaheuristic mechanisms. The intended contribution is not to prove that oxygen-state regulation is universally superior, but to present a reproducible search-governance architecture in which diversification, intensification, and recovery are coordinated by the same state variable.
Methodological distinction between SDOA and common adaptive metaheuristic control strategies.
Methodological distinction between SDOA and common adaptive metaheuristic control strategies.
From a search-dynamics perspective, SDOA can be interpreted as a bounded stochastic process with elitist memory and state-dependent transition kernels. Bound repair keeps candidate positions inside the admissible search domain, while reset preserves a non-zero probability of re-entering unexplored regions. Elitist preservation makes the best penalized objective sequence non-increasing across iterations, although this monotonicity is not a formal proof of global optimality. The claim made here is therefore qualitative and empirical: oxygen-state regulation delays premature homogenization, supports local refinement near feasible elites, and provides a transparent recovery path for low-oxygen, stagnant, or infeasible agents.
The computational overhead of this state regulation is modest. Apart from objective and constraint evaluation, each iteration updates N oxygen states and applies stage-specific movements over d variables, giving O(Nd) movement complexity and O(Nd) memory. Consequently, practical runtime is driven primarily by the number of function evaluations and by the cost of objective or constraint evaluation. For analytical benchmarks, the overhead is small; for simulation-driven engineering design, external models would dominate the total cost. This distinction motivates the runtime reporting in Section 6.7.
The empirical study is organized around a unified benchmark design rather than isolated case demonstrations. The constrained engineering layer evaluates feasibility preservation, mixed-variable handling, and behavior near active constraint boundaries. The mathematical benchmark layer evaluates general search dynamics across continuous landscapes with different modality, separability, discontinuity, and basin structures. All experiments are expressed in the common minimization form
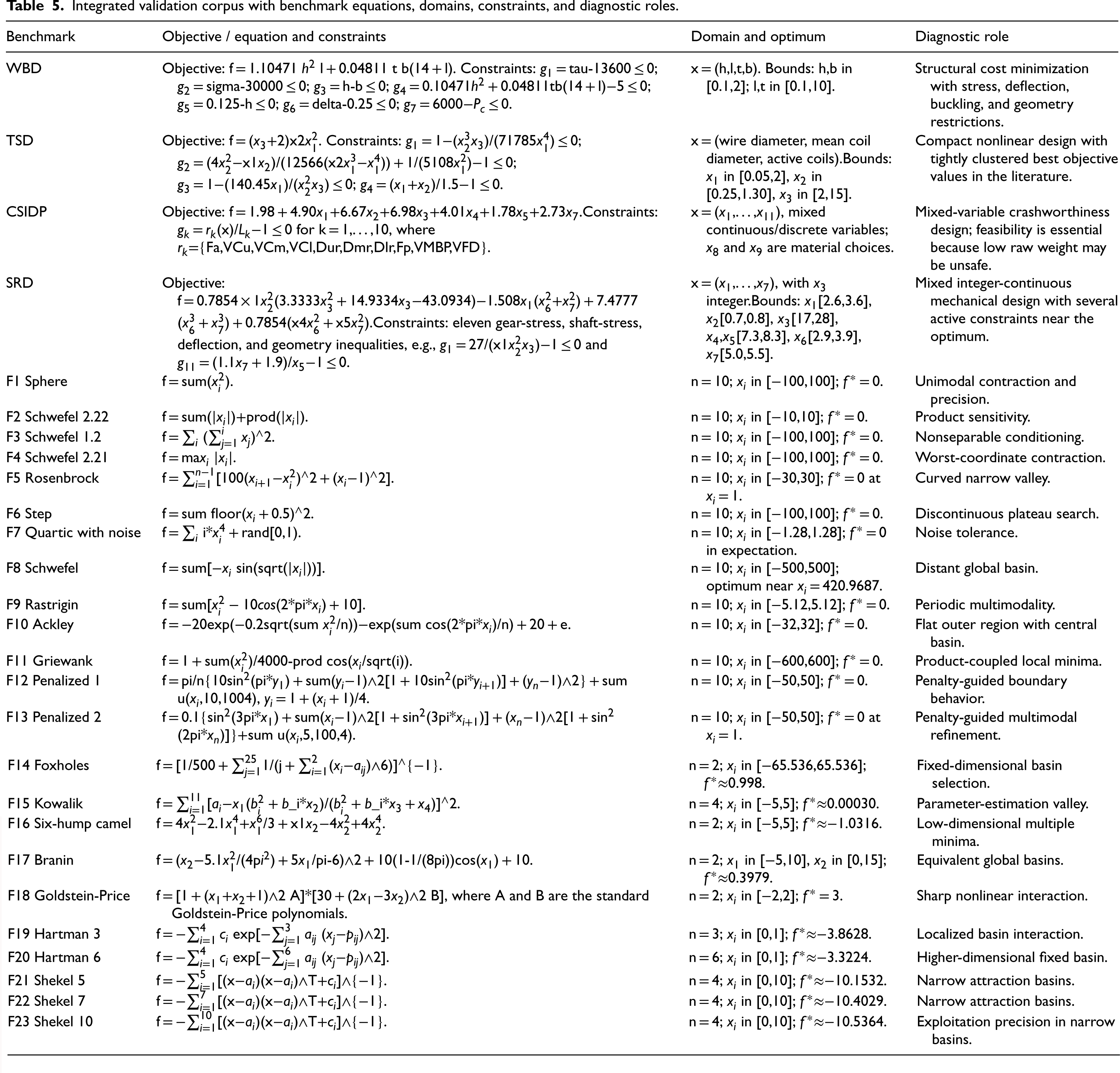
Figure 3 illustrates the physical meaning of the four engineering problems, while Table 5 provides the complete benchmark matrix used in the study. The table includes the objective or test equation for each validation problem so that the mathematical scope of the experiments is transparent before the individual formulations are discussed.
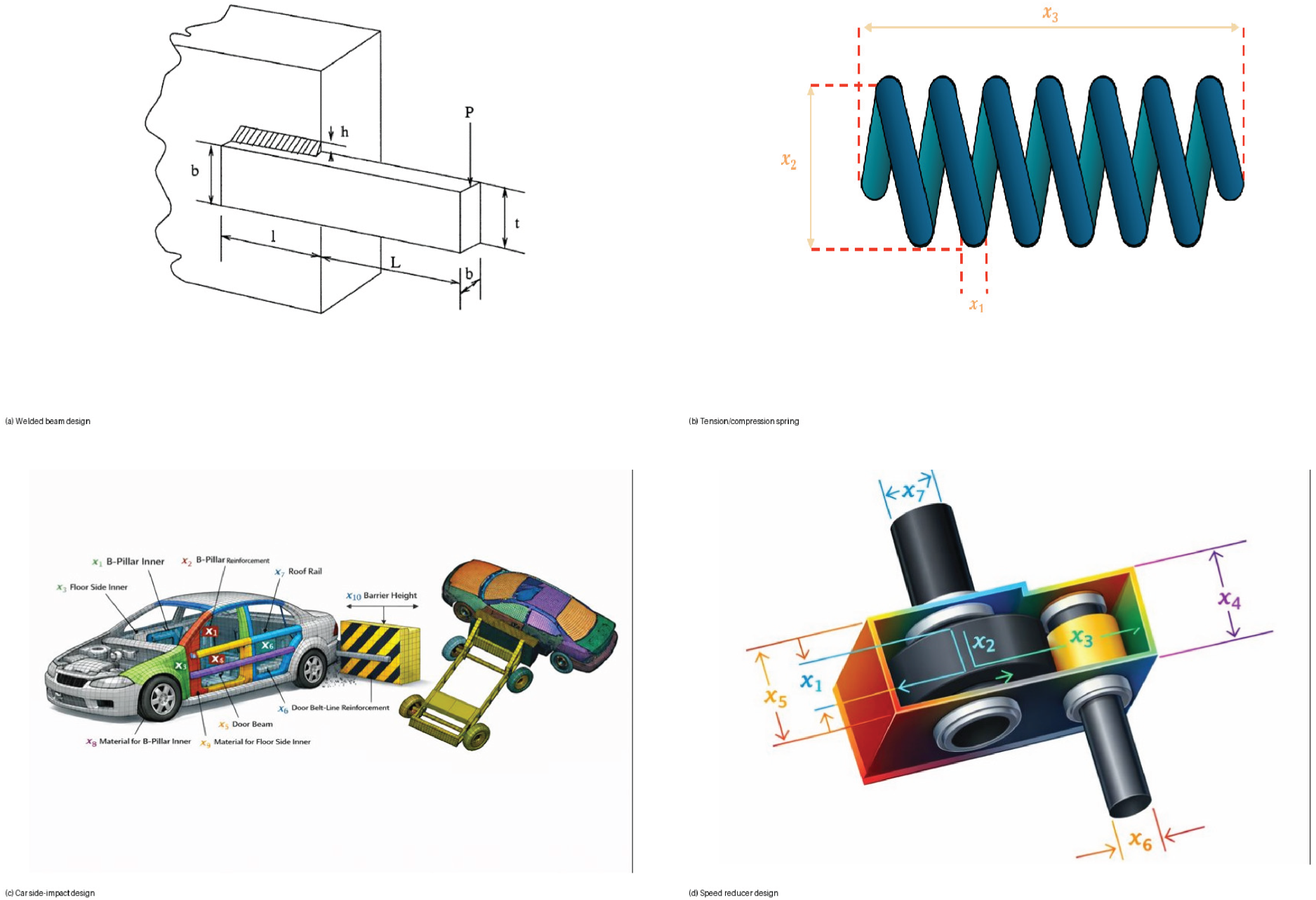
Geometric interpretation of the four engineering design benchmarks used in this study.
Integrated validation corpus with benchmark equations, domains, constraints, and diagnostic roles.
The geometric sketches in Figure 3 explain the engineering roles of WBD, TSD, CSIDP, and SRD. The remaining mathematical functions broaden the validation corpus by evaluating search dynamics under known global optima, controlled bounds, and heterogeneous landscape structures.
Table 5 makes the benchmark selection explicit. The first four rows evaluate constrained feasibility and mixed-variable handling; the remaining rows evaluate general search behavior under standard mathematical landscapes. This structure improves the scientific interpretation of the results because each benchmark is linked to a diagnostic purpose rather than used only as a numerical scoreboard.
The welded beam design problem minimizes fabrication cost subject to stress, deflection, buckling, and geometric constraints. Let 
The constraints are












The tension/compression spring design problem minimizes spring weight while satisfying shear-stress, surge-frequency, deflection, and geometric constraints. Let 
The nonlinear constraints are




The car side-impact design problem minimizes structural weight subject to ten crashworthiness constraints. The design vector contains eleven variables, of which 
Crashworthiness is enforced through ten normalized inequality constraints of the form

The response-surface models are

















The normalized crashworthiness constraints are
The decision bounds used for the structural variables are

Variables
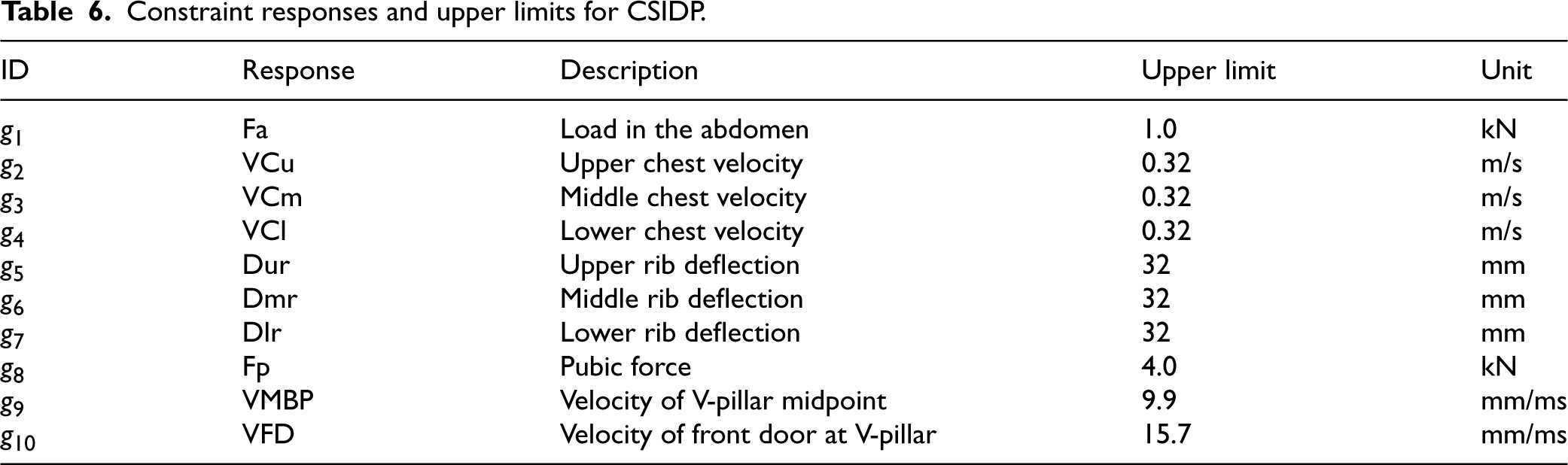
where
Table 6 is important because the CSIDP constraints are heterogeneous in scale and physical meaning. By expressing them as normalized response-to-limit ratios, SDOA can penalize crashworthiness violations on a common basis. This normalization helps stabilize the method on CSIDP despite the mixture of load, velocity, and deformation responses.
Constraint responses and upper limits for CSIDP.
The speed reducer design problem minimizes total reducer weight subject to eleven nonlinear inequality constraints. Let 
The SRD constraints are









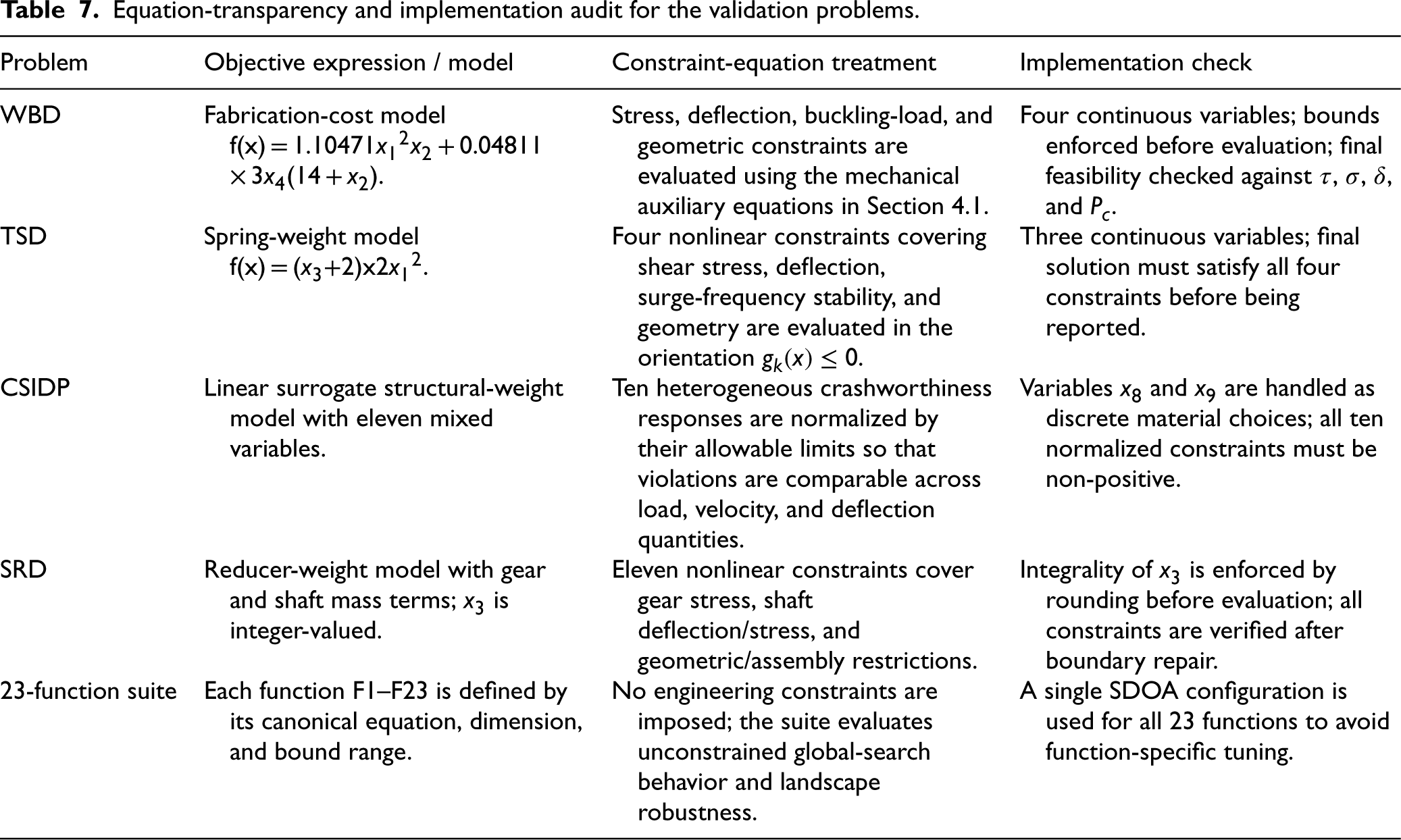
To support reproducibility, the mathematical formulation and implementation pathway are treated as part of the experimental protocol. All constrained problems are evaluated after bound enforcement, discrete-variable treatment where required, objective calculation, and constraint-violation aggregation. The mathematical functions are evaluated using their canonical bounds and dimensions under the same SDOA update rules, without function-specific retuning (Table 7).
Equation-transparency and implementation audit for the validation problems.
Equation-transparency and implementation audit for the validation problems.
This audit clarifies how each component of the validation corpus is implemented. The four engineering problems emphasize feasibility and constraint-active behavior, whereas F1-F23 emphasize landscape diversity under a declared fixed configuration. Together, they provide complementary evidence for the same algorithmic mechanism (Table A5).
Experimental protocol, reproducibility, and statistical validation
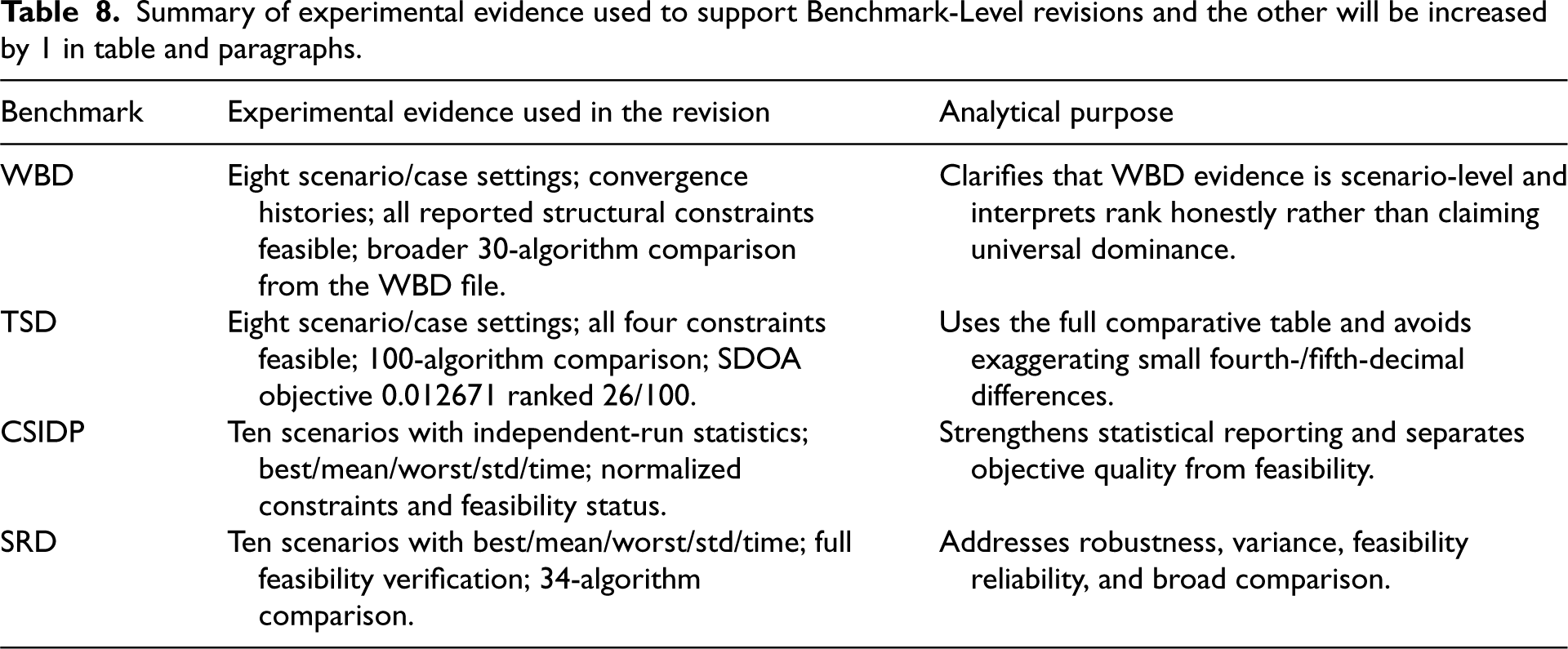
All experiments were implemented in MATLAB using the same SDOA core: oxygen decay, state-based movement operators, elite preservation, feasibility-aware acceptance, and selective reset. Because WBD, TSD, CSIDP, and SRD differ in dimensionality, variable type, constraint topology, and feasible-region geometry, the parameter studies were not forced into one identical budget. Instead, each benchmark was examined through a scenario sweep appropriate to its search difficulty, and the selected settings were then analyzed transparently (Table 8).
For CSIDP and SRD, repeated-run statistical evidence is available. In CSIDP, each scenario was executed through ten independent runs with different random seeds, and the reported indicators include best, mean, worst, standard deviation, and runtime. The SRD study likewise reports best, mean, worst, standard deviation, runtime, and explicit feasibility verification across ten parameter scenarios. For WBD and TSD, the evidence is scenario-based and is supported by convergence histories, feasibility checks, and comparative tables.
Formal non-parametric tests such as Wilcoxon signed-rank or Friedman procedures require paired repeated-run samples obtained under comparable settings. Several comparator algorithms discussed in the benchmark literature report only best or aggregate values, without raw repeated-run samples, random seeds, stopping tolerances, or feasibility histories. Consequently, the comparative analysis is reported through repeated-run statistics where available, objective-deviation analysis, feasibility status, and an explicit statement of comparison scope.
Summary of experimental evidence used to support Benchmark-Level revisions and the other will be increased by 1 in table and paragraphs.
Summary of experimental evidence used to support Benchmark-Level revisions and the other will be increased by 1 in table and paragraphs.
The empirical study is therefore organized as a single benchmark corpus rather than as unrelated case studies. The corpus combines constrained engineering formulations with standard mathematical functions so that SDOA can be examined from complementary perspectives: feasibility preservation, mixed-variable handling, exploitation accuracy, multimodal exploration, and robustness across attraction-basin structures. All problems are written in the common form
Parameter studies were not imposed uniformly across benchmarks because the problems differ substantially in scale and difficulty. Instead, each benchmark was tested under scenario sweeps tailored to its search budget and feasibility characteristics.
The experimental evidence consolidated here was produced with a MATLAB implementation on 16-GB workstations. Although the case studies are benchmark-specific, the algorithmic backbone remains constant: oxygen decay, state-based movement operators, elite preservation, feasibility-aware acceptance, and selective reset.
In all reported results, only feasible designs are retained as final solutions. The discussion therefore emphasizes objective quality together with run-to-run dispersion, active-constraint behavior, runtime, and the distinction between the numerically best scenario and the statistically most stable scenario.
The validation protocol is designed as a unified sequence. WBD, TSD, CSIDP, and SRD evaluate SDOA under explicit engineering constraints, while F1-F23 evaluate the same search mechanism under known mathematical landscapes. The two groups are interpreted jointly: the engineering benchmarks test feasibility and practical design relevance, whereas the mathematical functions test whether the oxygen-regulated search policy transfers across smooth, discontinuous, multimodal, penalized, and fixed-dimensional structures.
The mathematical-function component used a fixed 200-iteration budget and one declared parameter setting across all functions. This choice was intended to evaluate the transferability of the search mechanism rather than to optimize each function through case-specific retuning.
The official CEC constrained benchmark suites remain the appropriate next standard for a full competition-style comparison under uniform source code, feasibility tolerance, function-evaluation budget, and paired repeated runs.
Parameter calibration and sensitivity design
Parameter-calibration protocol and safeguards against tuning bias.
Parameter-calibration protocol and safeguards against tuning bias.
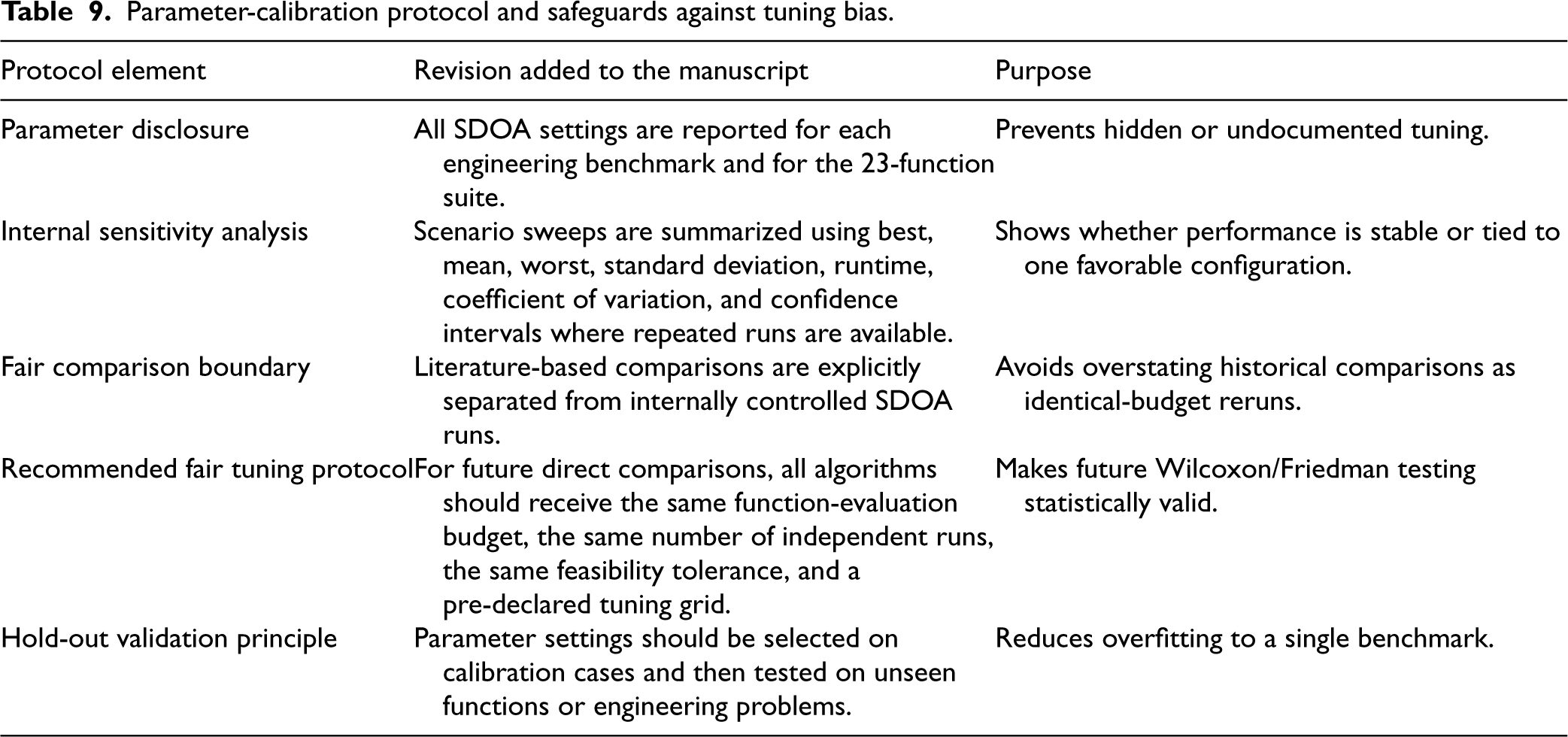
The present study reports two types of evidence with different inferential strength: internally generated SDOA scenario statistics and literature-based comparator values. These evidence types are interpreted separately to avoid presenting historical comparisons as fully controlled experiments.
Statistical and computational-efficiency protocol.
Statistical and computational-efficiency protocol.
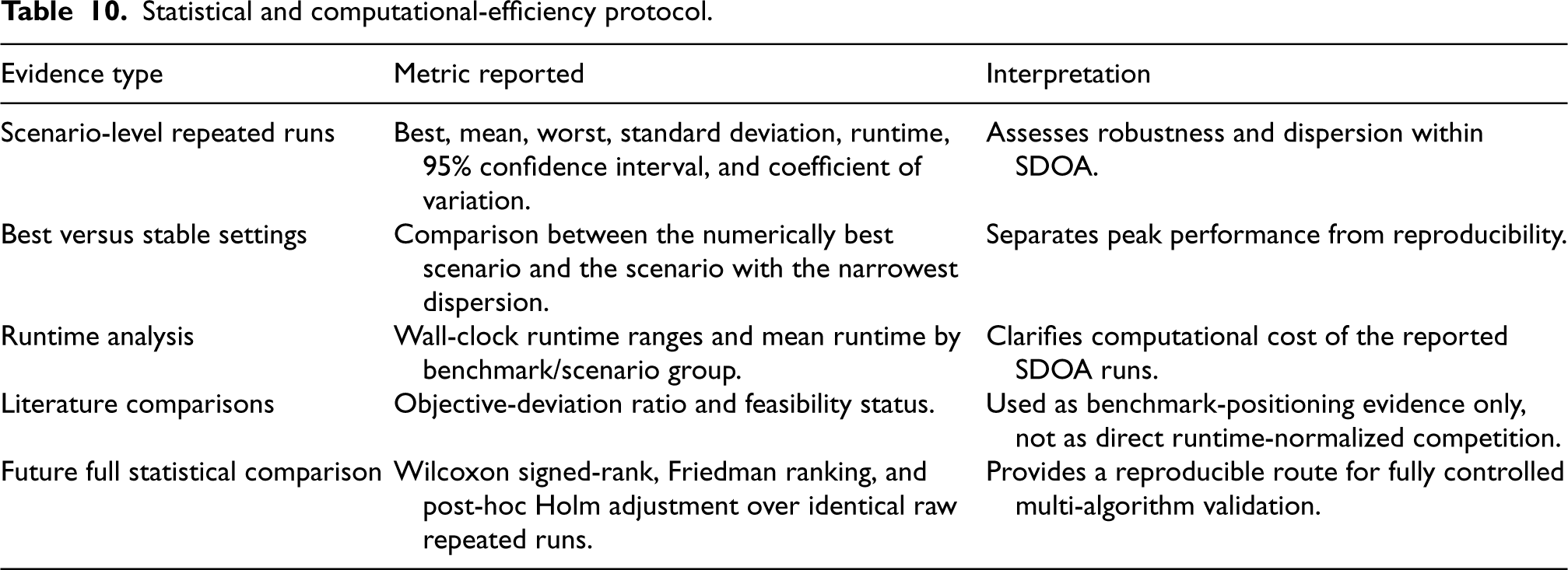
The results are presented as an integrated empirical narrative. The engineering cases establish feasibility, mixed-variable handling, and performance near active constraints; the mathematical functions then expose the same SDOA mechanism to standard landscape structures with known optima. Subsequent subsections synthesize comparative standing, parameter sensitivity, computational cost, statistical reliability, and mechanism-level behavior. This organization supports scientific interpretation rather than emphasizing isolated best-run values (Table A2).
The scenario sweeps reveal a consistent pattern across the four engineering problems. SDOA benefits from relatively strong early movement, moderate oxygen decay, and small-to-moderate elite sets when the feasible region is narrow. Longer iteration budgets generally reduce dispersion, but the improvement is most meaningful when additional evaluations are combined with selective reset rather than merely larger populations. This effect is most visible in SRD and CSIDP, where several constraints are active near high-quality solutions.
Cross-benchmark best settings and outcomes.
Cross-benchmark best settings and outcomes.

Figure 4 synthesizes the benchmark-specific performance profiles into one visual comparison. Rather than relying only on isolated best values, the figure shows how the objective changes across cases and scenarios, making it easier to judge whether the algorithm improves consistently as the search budget and parameter settings vary.
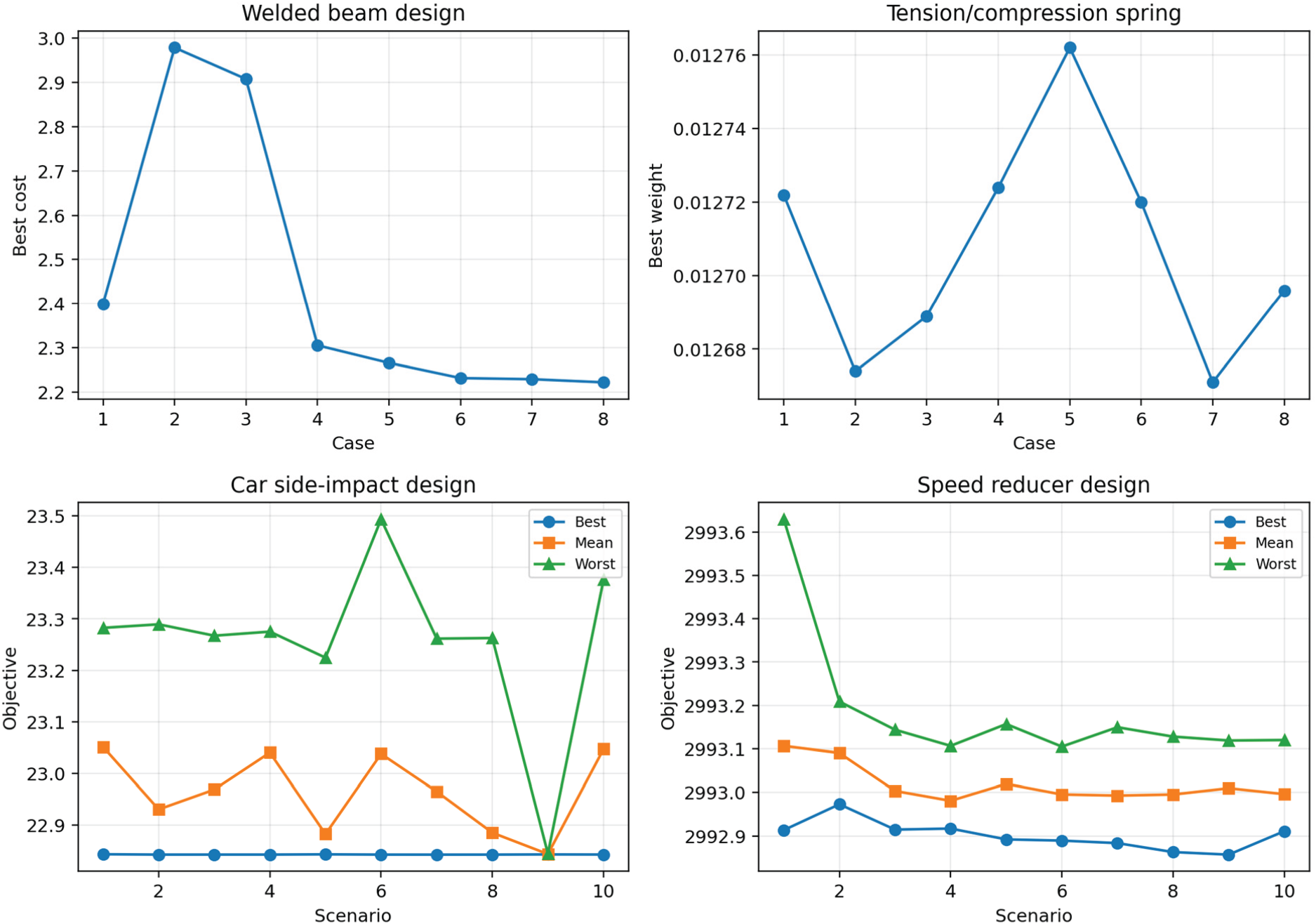
Objective-value trajectories across the benchmark-specific case and scenario studies.
The trends in Figure 4 support three observations developed in the subsequent subsections. First, WBD exhibits a clear reduction in cost as the computational budget increases. Second, TSD remains concentrated within a narrow performance band, indicating stability under multiple settings. Third, CSIDP and SRD show that SDOA repeatedly locates high-quality feasible regions across scenarios rather than depending on a single exceptional run.
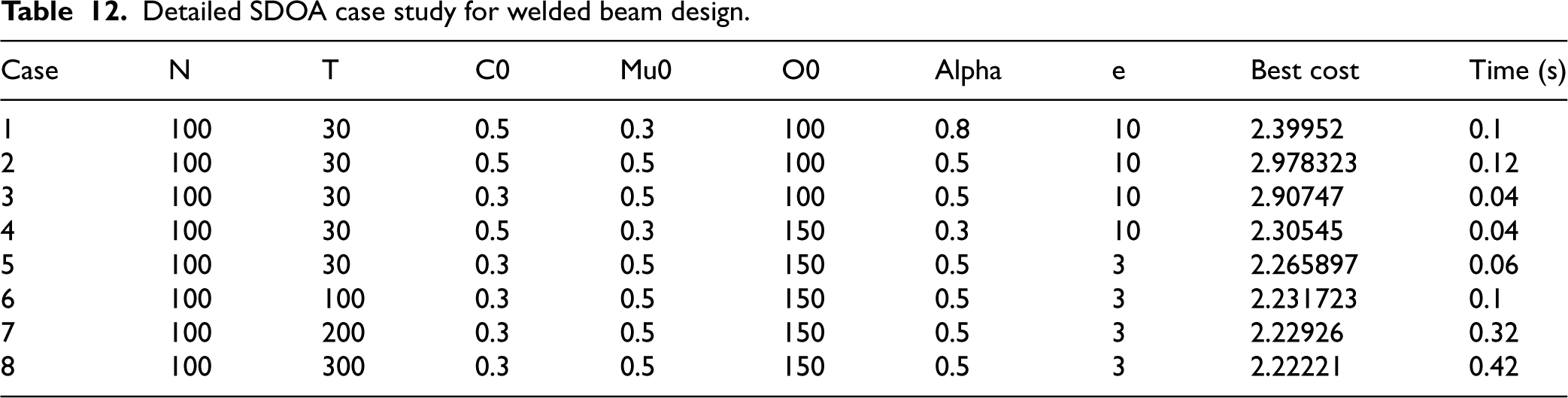
For welded beam design, performance improved as the iteration budget increased and the search became less aggressive. The best reported result, 2.22221, was obtained using 100 divers, 300 iterations, current strength 0.3, mutation rate 0.5, initial oxygen 150, oxygen decay 0.5, and elite size 3.
The detailed case-by-case results are reported in Table 12. The progression from Case 1 to Case 8 demonstrates a clear reduction in cost without loss of feasibility. The best configuration converged to
Detailed SDOA case study for welded beam design.
Detailed SDOA case study for welded beam design.
Table 12 shows a systematic reduction in welded-beam cost as the computational budget increases. This improvement was achieved without loss of feasibility, which is more informative than a single final best value. The table therefore supports the view that oxygen-regulated staging can guide the search from coarse exploration toward fine structural-design refinement.
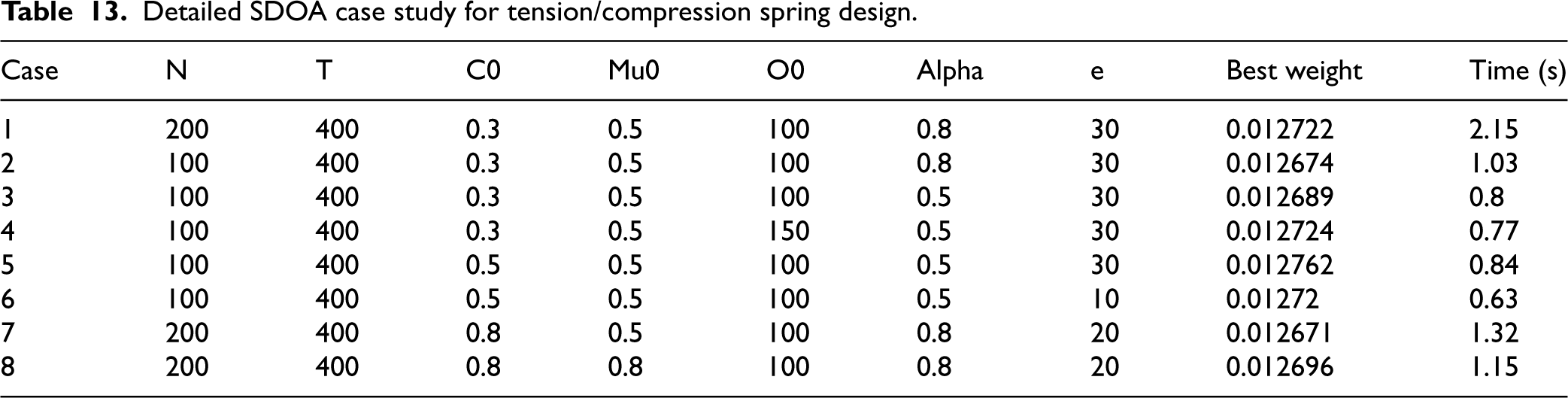
For tension/compression spring design, the strongest configuration used 200 divers, 400 iterations, current strength 0.8, mutation rate 0.5, oxygen level 100, oxygen decay 0.8, and elite size 20. This setting produced a best feasible objective of 0.012671.
The scenario spread on the spring benchmark is extremely small, consistent with the broader literature: many state-of-the-art optimizers cluster tightly in the fourth and fifth decimal places. The practical significance of SDOA on this benchmark therefore lies in reproducibility and feasibility reliability rather than in a large numerical separation from all competitors.
Table 13 reveals a narrow spread of best weights across the spring-design cases. This indicates that SDOA does not depend on a fragile parameter setting to obtain a competitive answer; instead, it repeatedly converges to the same small feasible region under several configurations. For a benchmark where many algorithms differ only in the fourth or fifth decimal place, this stability is important.
Detailed SDOA case study for tension/compression spring design.
Detailed SDOA case study for tension/compression spring design.
CSIDP is a stringent test of feasibility management because low structural weight is meaningful only when all crashworthiness constraints are satisfied. The best reported configuration used 500 divers, 5000 iterations, current strength 0.9, mutation rate 0.5, oxygen level 200, oxygen decay 0.3, and elite size 25, producing a best feasible objective value of 22.842983.
Two complementary observations emerge from the CSIDP scenario study. Scenario 7 delivered the best objective value, whereas Scenario 9 produced the lowest standard deviation. The numerically best setting and the statistically most concentrated setting are therefore not identical, a distinction that strengthens the empirical interpretation.
Table 14 documents the CSIDP scenario settings and shows that the reported performance differences are tied to interpretable changes in search intensity, oxygen regulation, and elite retention. The table separates the question of which configuration produced the best objective from the broader question of which configurations maintained statistically controlled behavior over repeated runs.
Scenario settings for car side-impact design.
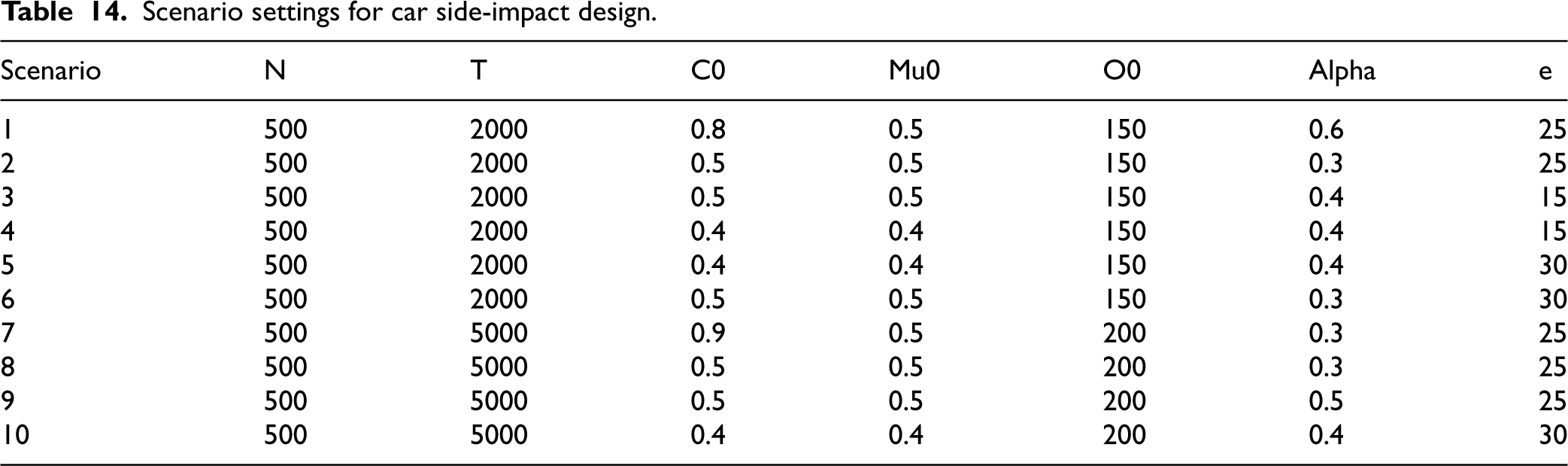
Scenario settings for car side-impact design.
Table 15 shows that CSIDP should be evaluated through both objective quality and dispersion. Scenario 7 delivered the best value, while Scenario 9 produced an exceptionally small standard deviation and therefore a tighter concentration of repeated-run outcomes. This separation of peak performance from reproducibility is important for constrained design.
Statistical performance of SDOA on car side-impact design.
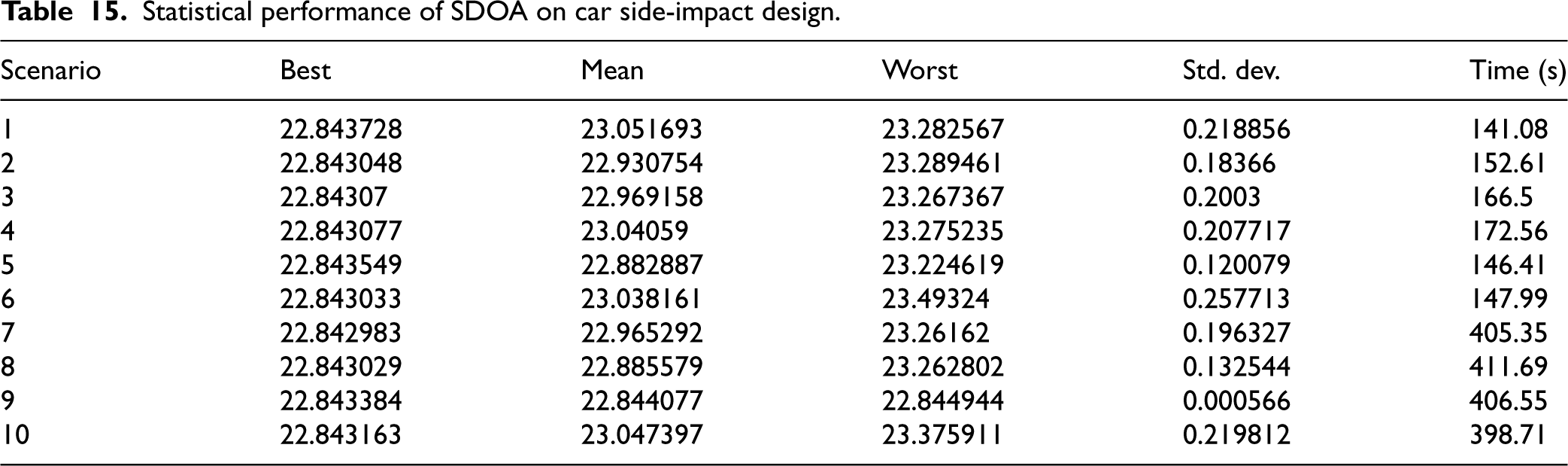
The best design vector from Scenario 7 is reported in Appendix A. Across the feasibility tables, all ten crashworthiness constraints remained satisfied, and several active constraints were approached closely without violation.
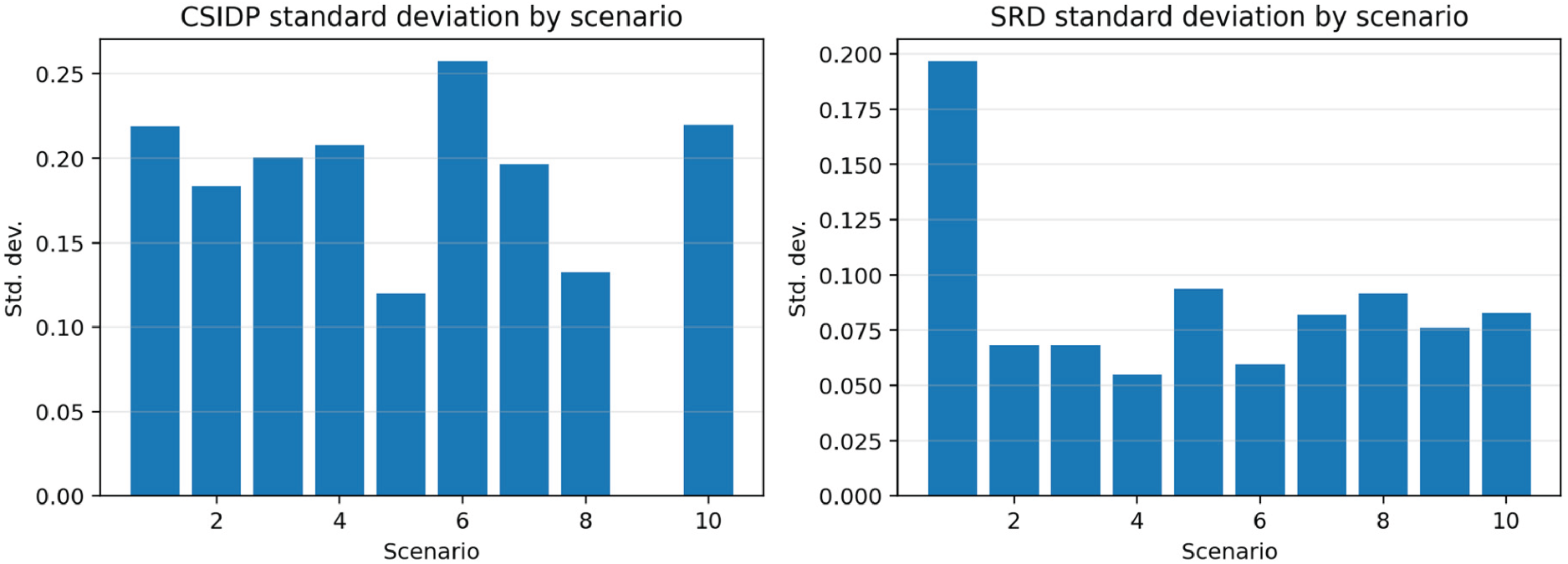
Figure 5 focuses on dispersion rather than absolute objective value. This figure is important because a constrained optimizer should not be judged only by its single best run; it should also be assessed by how tightly repeated runs cluster around that performance.
Standard-deviation profiles across the CSIDP and SRD scenario studies.
Figure 5 reinforces the same point. For CSIDP, Scenario 7 produced the best objective value, whereas Scenario 9 yielded the smallest standard deviation. For SRD, Scenario 9 achieved the best objective value, while Scenario 4 provided the narrowest dispersion. The figure therefore separates absolute solution quality from repeated-run stability.
SRD provides the strongest support in this study for SDOA on narrow feasible-region design. The best configuration used 500 divers, 2000 iterations, current strength 0.3, mutation rate 0.3, oxygen level 200, oxygen decay 0.4, and elite size 20, yielding a best feasible objective value of 2992.856695.
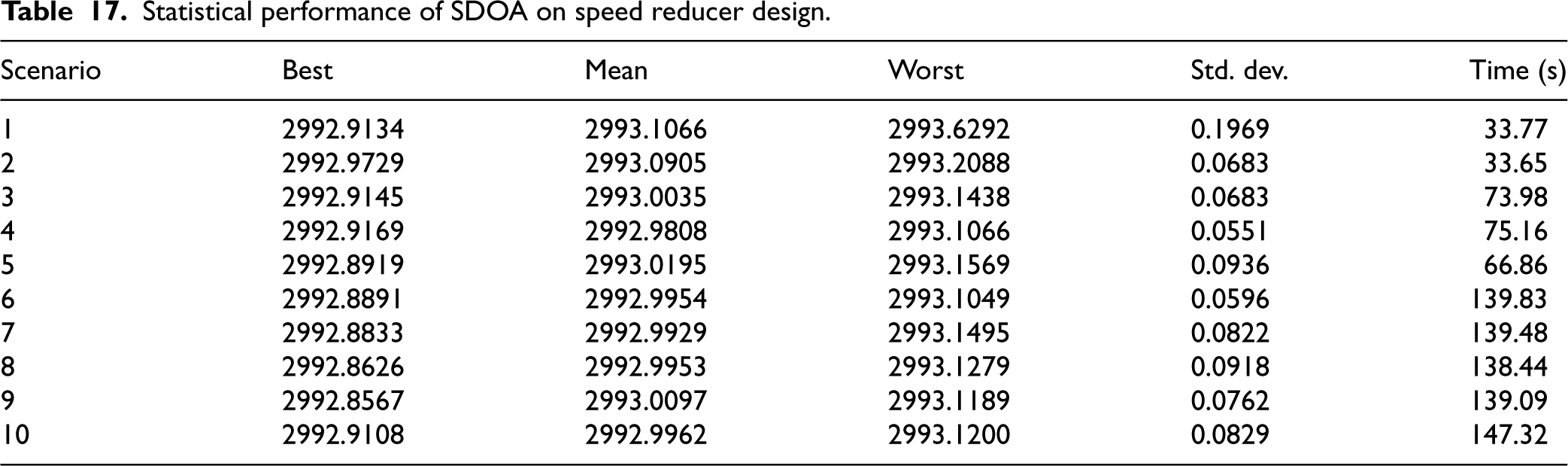
As in CSIDP, the numerically best SRD scenario and the most stable scenario were not the same. Scenario 9 produced the best objective value, whereas Scenario 4 yielded the lowest standard deviation. The results therefore support a nuanced interpretation in which SDOA combines strong solution quality with controlled statistical spread.
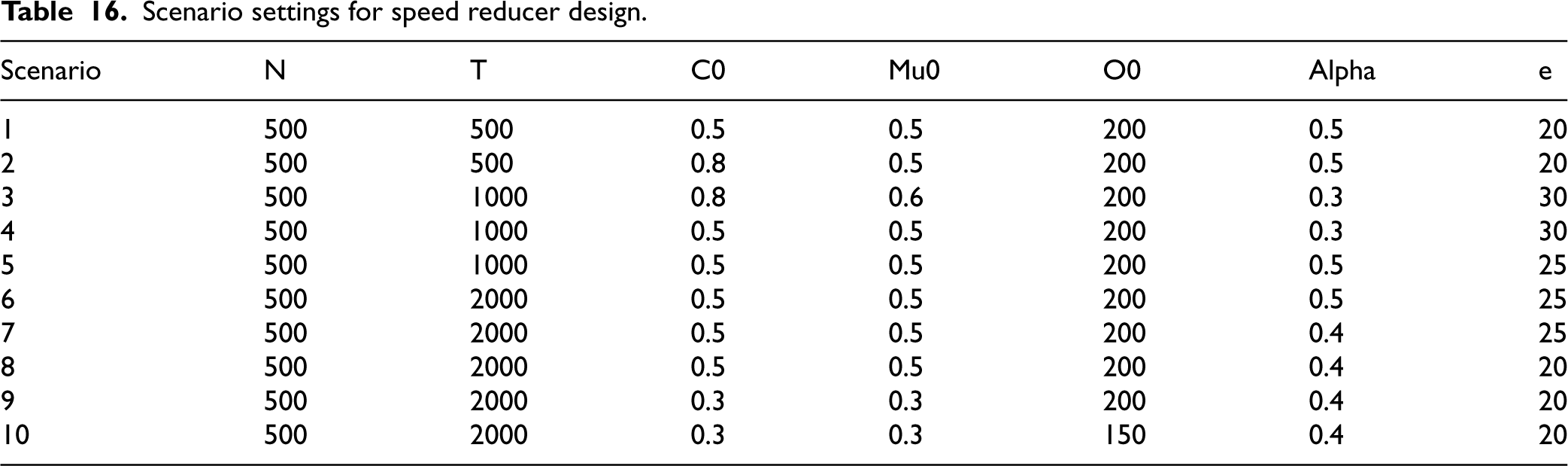
Table 15 shows that the SRD study explored a structured range of search budgets and oxygen-state configurations rather than a single arbitrary parameter set. The table helps explain why the SRD results are especially informative: the optimum is close to several active constraints, so differences in current strength, oxygen decay, and elite size visibly affect the balance between accuracy and stability.
Scenario settings for speed reducer design.
Scenario settings for speed reducer design.
Table 17 confirms that SDOA remained statistically well behaved on SRD across all ten scenarios. Scenario 9 achieved the best objective value, while Scenario 4 showed the smallest standard deviation. This difference between best and most stable settings is consistent with careful benchmark analysis and should not be collapsed into a single ranking claim.
Statistical performance of SDOA on speed reducer design.
The comparative set is organized by benchmark rather than by a single universal list of algorithms, because the available literature differs across WBD, TSD, CSIDP, and SRD. Table 18 states the baseline-selection logic and the limitation of each comparison layer. This framing makes clear that the manuscript claims benchmark positioning, not a fully controlled rerun of every modern optimizer under identical code and hardware.
Baseline-selection rationale and comparison limits.
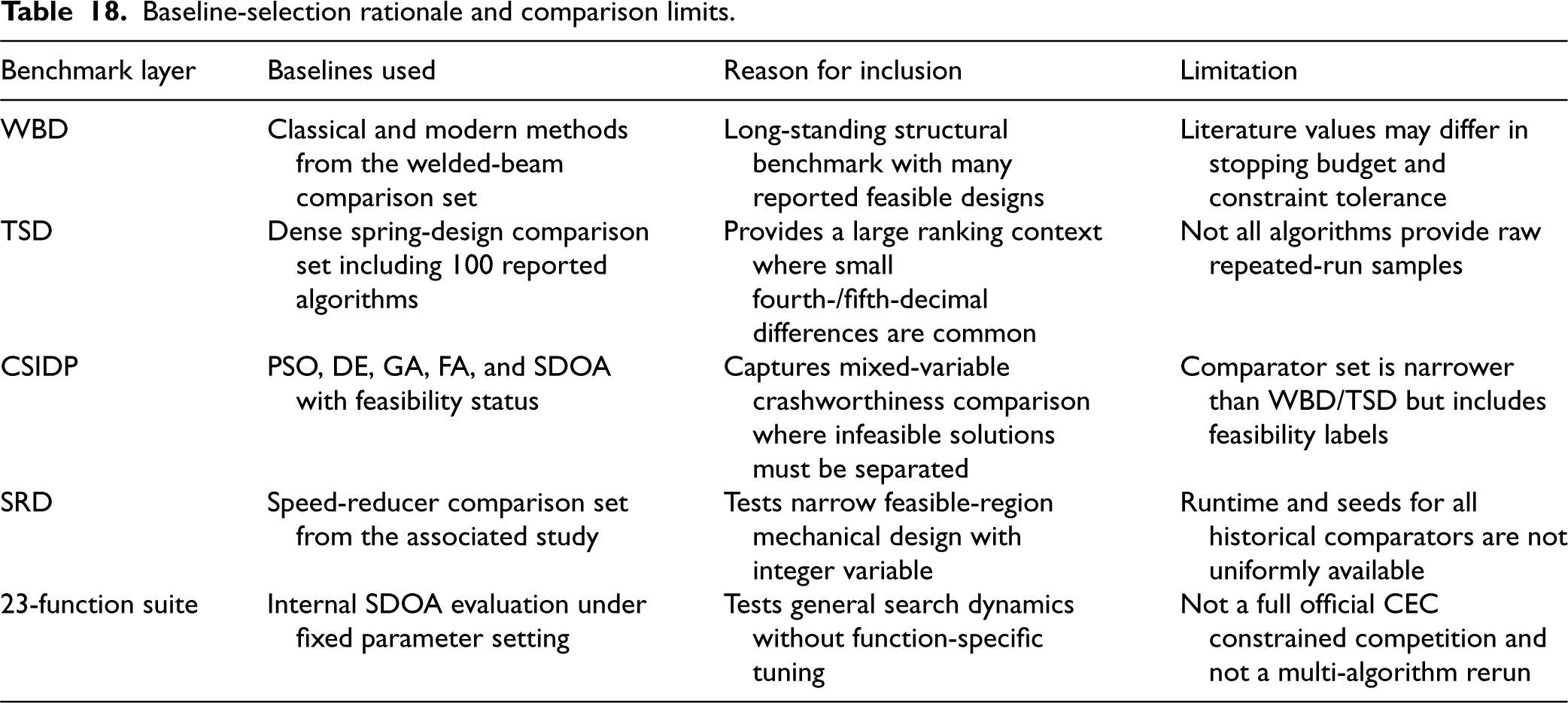
Baseline-selection rationale and comparison limits.
The comparative study uses the problem-specific information available in the associated benchmark studies. WBD is compared against the algorithms listed in the welded-beam study, TSD against the spring-design comparison set, CSIDP against the established PSO/DE/GA/FA comparison with explicit feasibility status, and SRD against the speed-reducer comparison set. These are literature-based reference comparisons rather than perfectly normalized head-to-head reruns on identical hardware; therefore, the interpretation emphasizes objective deviation, feasibility reliability, and practical standing within each benchmark.
Taken together, the results suggest that the main value of SDOA is methodological rather than a claim of universal first-place ranking. The algorithm delivers high-quality feasible solutions with stable behavior across structurally different constrained benchmarks. This distinction matters because a metaheuristic may report an impressive best value while failing to reproduce it or while approaching it through weak feasibility.
A dedicated comparative study is necessary because strong single-run values alone do not establish methodological competitiveness. Consolidating these results in one place makes it possible to evaluate SDOA against the best reported methods on each benchmark while preserving a fair distinction among objective value, feasibility, and statistical reliability.
For minimization problems, the normalized objective-deviation ratio of algorithm j is defined as

Table 19 sharpens the interpretation of the preceding results. For welded beam design, SDOA should be characterized as competitive rather than dominant, since harmony-search-based variants still report lower objective values in the broader literature. At the same time, SDOA remains aligned with several contemporary constrained optimizers, placing it within the modern competitive range.
Consolidated comparative standing of SDOA across the four benchmark families.
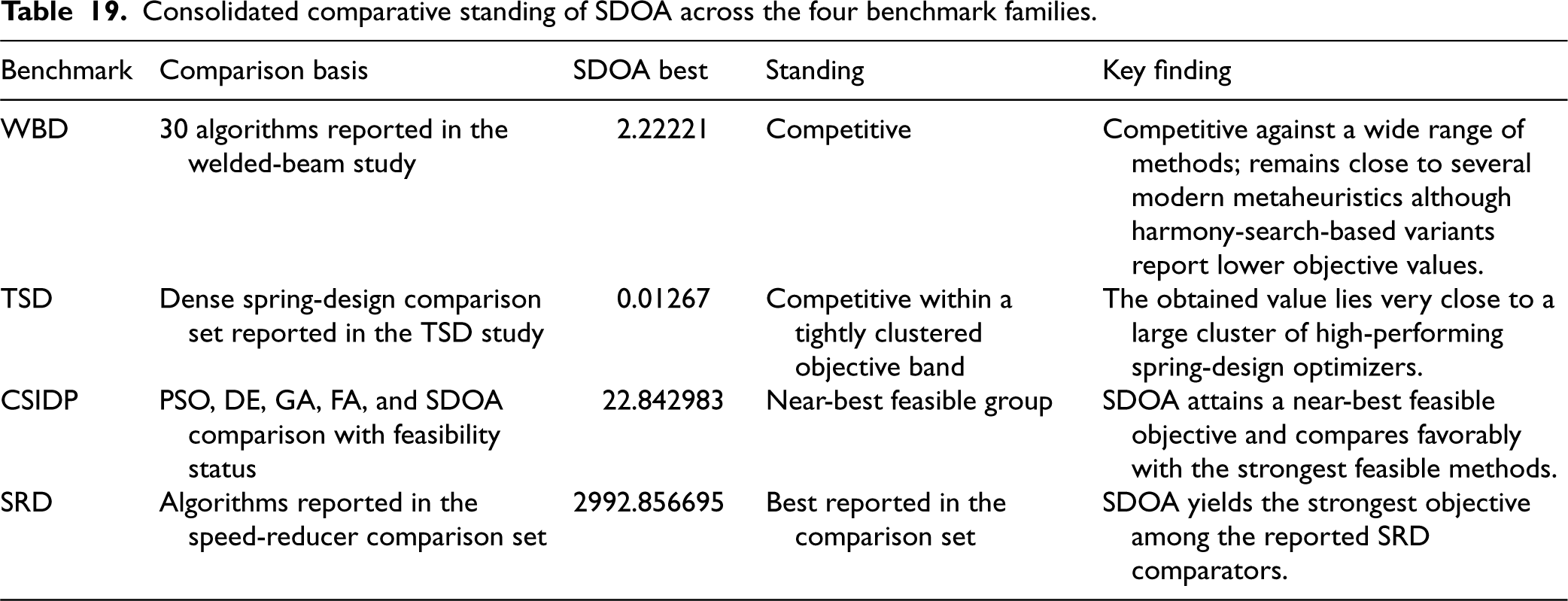
The spring benchmark leads to a different interpretation. In the comparison set of one hundred algorithms, SDOA, with an objective value of 0.012671, lies within the leading performance cluster. The best-reported method improves on SDOA by only about 0.55%, which is small relative to the scale and saturation of this benchmark. This supports the conclusion that SDOA is competitive on compact constrained mechanical design even when it is not the numerical best.
The comparative outcome is most favorable for CSIDP and SRD. In CSIDP, SDOA reaches a near-best feasible objective while preserving constraint satisfaction, whereas some literature methods approach similar raw objective levels only with feasibility concerns. In SRD, SDOA obtains the best objective value within the reported 34-algorithm comparison set. Because SRD is a mature benchmark with small performance margins, this result should be interpreted as meaningful within the available comparison scope, not as evidence of universal superiority over all possible implementations.
Overall, the comparative study supports a balanced assessment. SDOA is not uniformly ranked first on every benchmark, but it is consistently positioned near the leading group and shows its clearest advantage when feasibility reliability and narrow feasible regions are central to the optimization task.
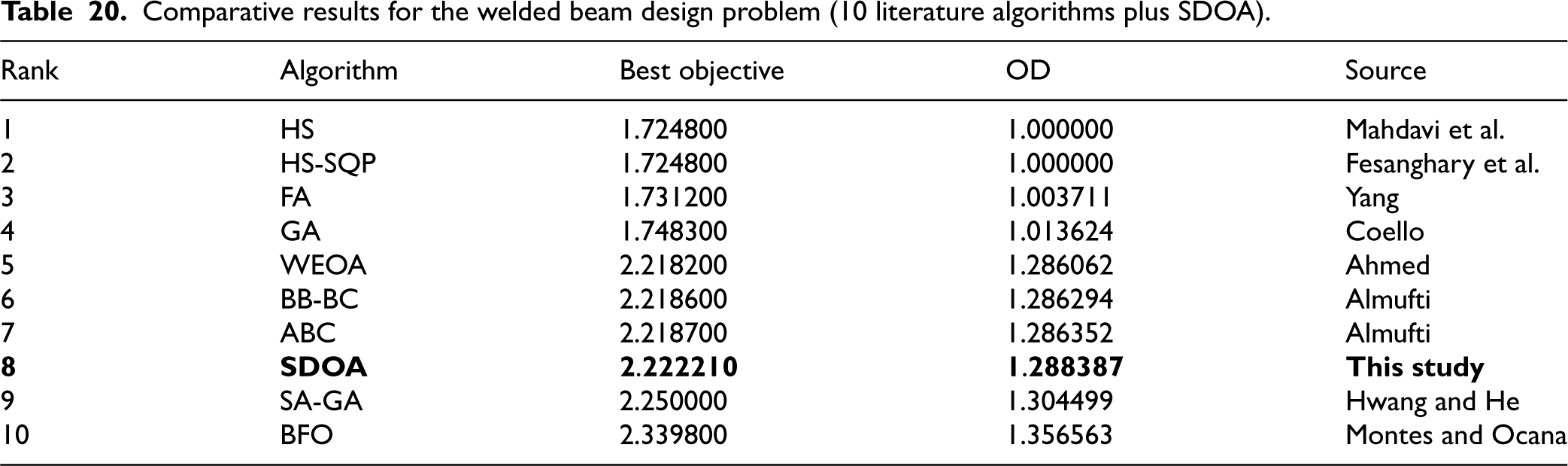
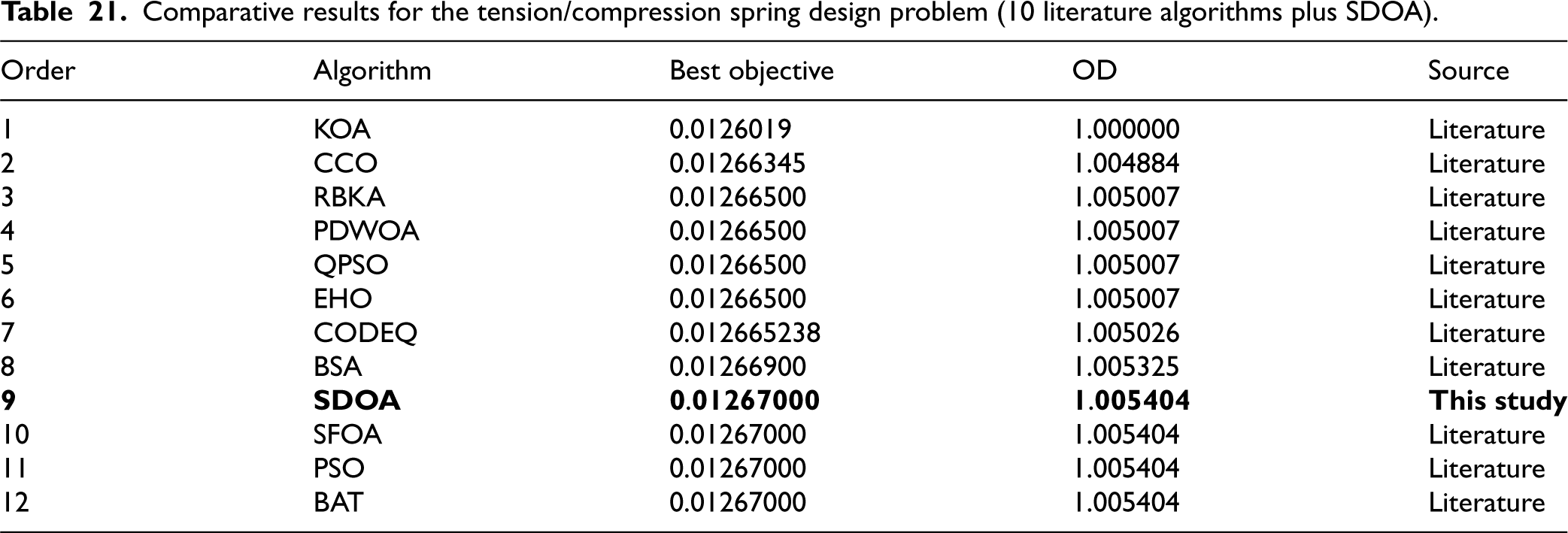
To make the benchmark-by-benchmark comparison explicit, Tables 20–23 report SDOA against ten other algorithms for each engineering problem. For welded beam design, tension/compression spring design, and speed reducer design, the comparator values are reproduced from the comparative study of Verma and Parouha. 35 For the car side-impact design problem, the comparator values are reproduced from the mixed-variable benchmark compilation of Bayzidi et al.. 36 The SDOA row in each table comes from the present study. Because historical studies may differ in stopping budgets, constraint tolerances, and benchmark variants, the tabulated literature values should be interpreted as reported reference points rather than perfectly normalized head-to-head experiments.
Comparative results for the welded beam design problem (10 literature algorithms plus SDOA).
Comparative results for the welded beam design problem (10 literature algorithms plus SDOA).
Comparative results for the tension/compression spring design problem (10 literature algorithms plus SDOA).
Comparative results for the car side-impact design problem (10 literature algorithms plus SDOA).

Comparative results for the speed reducer design problem (10 literature algorithms plus SDOA).
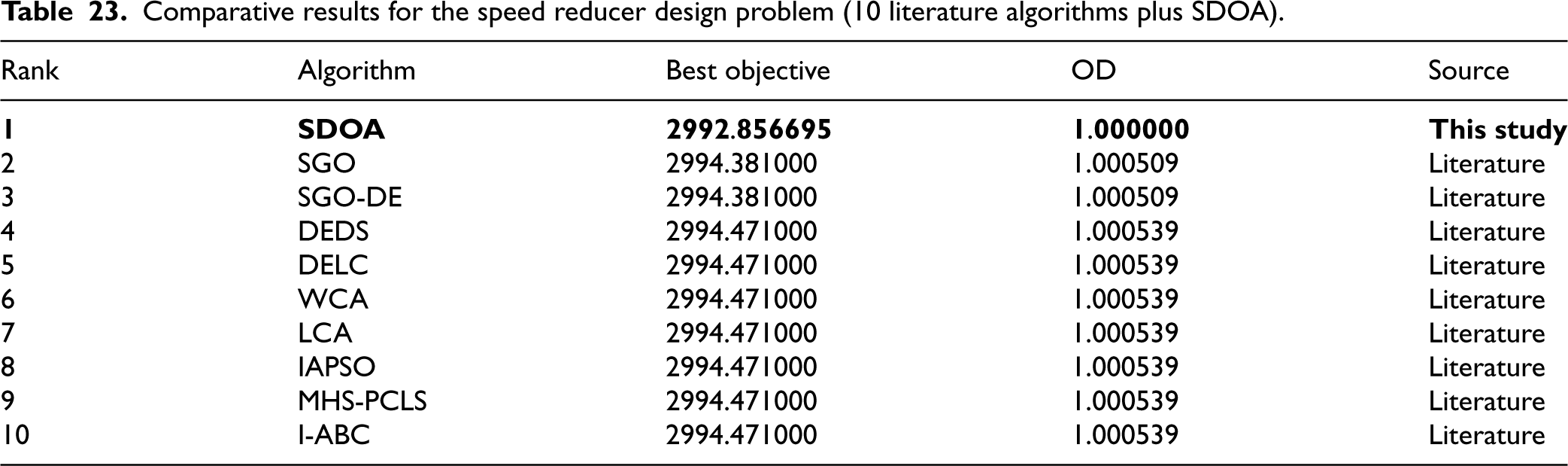
Table 20 shows that welded beam design remains the most difficult benchmark for SDOA in the present manuscript. Relative to the stronger classical and hybrid baselines reported in, 35 SDOA does not approach the leading minimum cost. This result should therefore be interpreted as evidence that SDOA is feasible and stable on WBD, but not yet competitive with the most specialized optimizers reported for this benchmark.
Table 21 leads to a more favorable interpretation. Although SDOA is not the numerical best method in the broader spring-design comparison, its best objective value differs only slightly from the elite group of algorithms. The OD value remains close to one, confirming that SDOA belongs to the leading performance cluster for the TSD benchmark.
Table 22 shows that SDOA is effectively tied with the strongest CSIDP methods. Its best objective value is numerically almost identical to the best literature values reported in, 36 and the difference is negligible at the practical scale of the problem. This supports the claim that SDOA is highly competitive on narrow, mixed-variable crashworthiness search spaces.
Table 23 indicates that SDOA performs strongly on the speed reducer problem, ranking behind only the best two methods in the classical comparison source. 35 This broader historical view should be read together with the modern SRD comparison set, where SDOA ranked first among the methods compiled in that manuscript. Taken together, the two views suggest that SDOA is highly competitive on SRD, even when the exact ordering varies with the comparison set and benchmark formulation.
Overall, the detailed comparative tables clarify the position of SDOA. The method is weakest on WBD, close to the state of the art on TSD, effectively tied with the strongest feasible CSIDP solvers, and strongly competitive on SRD. This profile is consistent with the central argument of the paper: SDOA's main strength lies in state-regulated feasibility preservation and constrained-search stability rather than universal first-place performance on every engineering benchmark.
The comparative interpretation draws directly from the four benchmark-specific studies. For WBD, SDOA achieves 2.22221 and remains competitive relative to several classical and modern methods, although it does not surpass the best harmony-search-based variants. For TSD, the obtained value of 0.01267 lies within a very narrow objective band populated by many strong optimizers. For CSIDP, SDOA attains a near-best feasible objective and compares favorably with PSO and DE while preserving constraint satisfaction. For SRD, SDOA yields the best objective within the reported comparison set, highlighting the value of state-regulated search on narrow feasible-region problems.
Taken together, these results support a cautious conclusion: SDOA is not uniformly dominant on every constrained design problem, yet it is consistently competitive and particularly effective when feasibility preservation and controlled refinement are decisive. This pattern is consistent with the algorithm design, in which oxygen-regulated state transitions couple diversification, intensification, and recovery within one coherent framework.
Landscape-level robustness within the integrated validation corpus
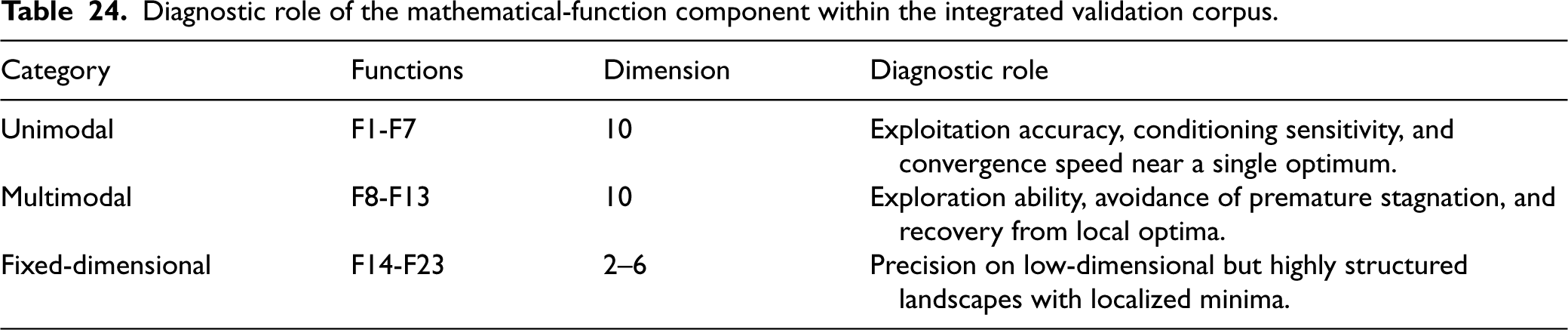
The mathematical-function component broadens the empirical basis of the paper beyond specialized engineering geometries while remaining part of the same validation corpus. Table 24 summarizes the diagnostic categories used to interpret F1-F23 alongside the constrained engineering problems rather than as a detached experiment.
Diagnostic role of the mathematical-function component within the integrated validation corpus.
Diagnostic role of the mathematical-function component within the integrated validation corpus.
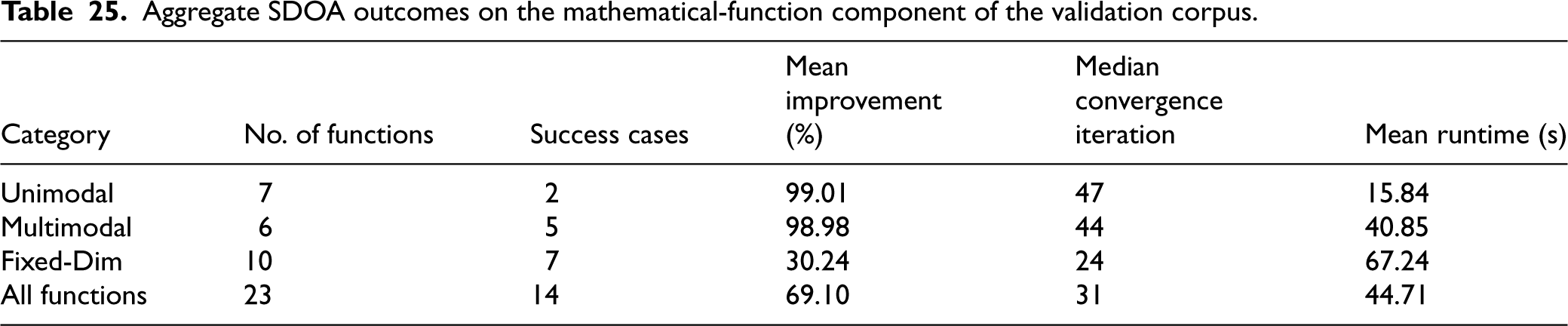
Table 25 reports the aggregate performance profile obtained from the mathematical-function component of the validation corpus. Table 26 extends this evidence by comparing the SDOA best values with representative metaheuristic algorithms on the same 23-function suite.
Aggregate SDOA outcomes on the mathematical-function component of the validation corpus.
Comparative results of SDOA and representative algorithms on the 23 mathematical benchmark functions.
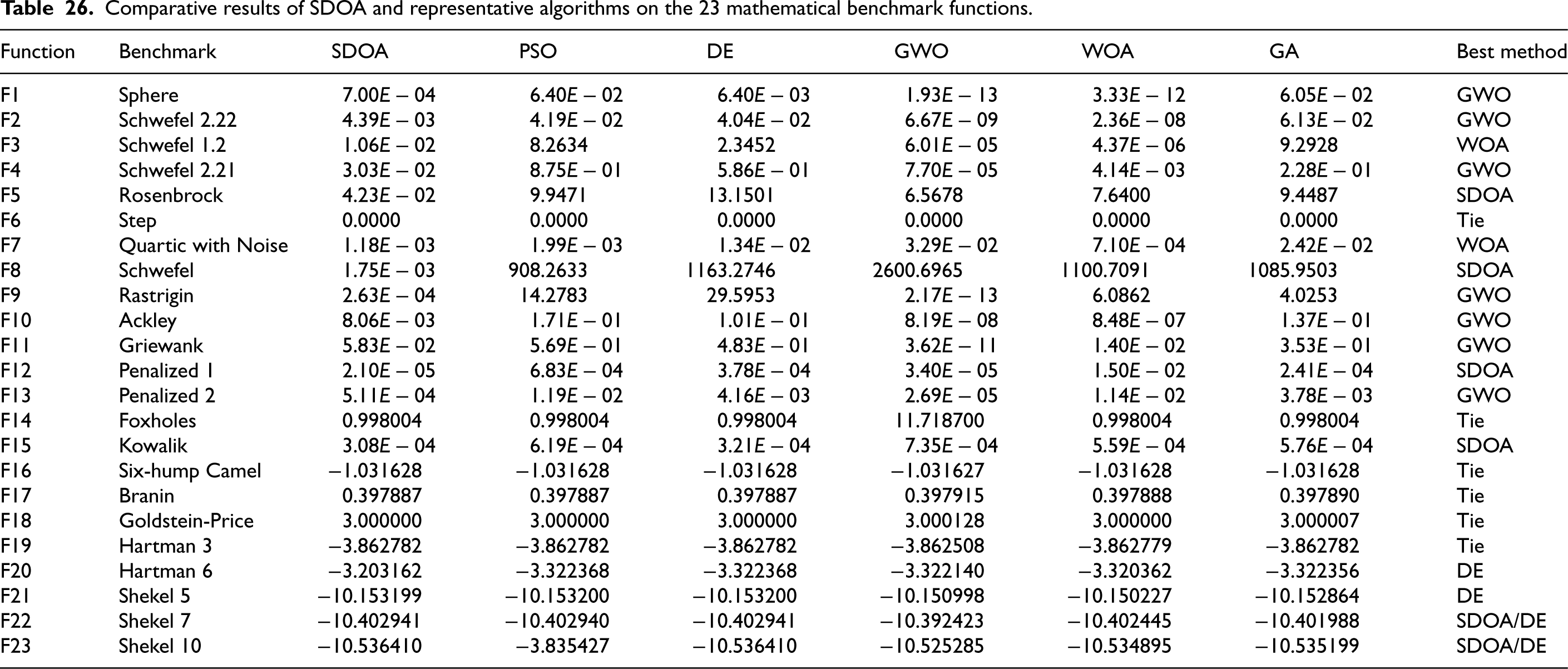
Table 26 compares SDOA with five representative metaheuristic algorithms: particle swarm optimization (PSO), differential evolution (DE), grey wolf optimizer (GWO), whale optimization algorithm (WOA), and genetic algorithm (GA). The table provides a clearer empirical context for the mathematical benchmark suite by showing that SDOA obtains the best or tied-best result on several functions, including Rosenbrock, Schwefel, Penalized Function 1, Kowalik, Six-hump Camel, Branin, Goldstein-Price, Hartman 3, Shekel 7, and Shekel 10.
The comparison also indicates that SDOA is not uniformly superior across all mathematical landscapes. GWO reports stronger values on several unimodal and multimodal functions, including Sphere, Schwefel 2.22, Rastrigin, Ackley, and Griewank, whereas DE is stronger on Hartman 6 and Shekel 5. This pattern supports a balanced interpretation: SDOA is competitive and robust, but its main contribution remains the state-regulated coordination of exploration, exploitation, elite communication, and diversity recovery rather than universal numerical dominance on every function.
Because comparator values may originate from implementations with different stopping criteria, random seeds, and boundary-handling rules, the table is used as a contextual benchmark comparison. A fully controlled statistical comparison would require rerunning all algorithms under the same population size, iteration budget, number of independent trials, stopping rule, and feasibility or boundary-handling protocol.
The detailed SDOA-only function-level results are provided in Appendix A to preserve readability in the main text. Several values approach the known global-optimum level of the corresponding benchmark functions, including Sphere, Step, Rastrigin, Ackley, penalized functions, Goldstein-Price, Hartman, and Shekel functions. The additional comparison in Table 26 complements these internal results by positioning SDOA relative to representative metaheuristic baselines.Figure 6).
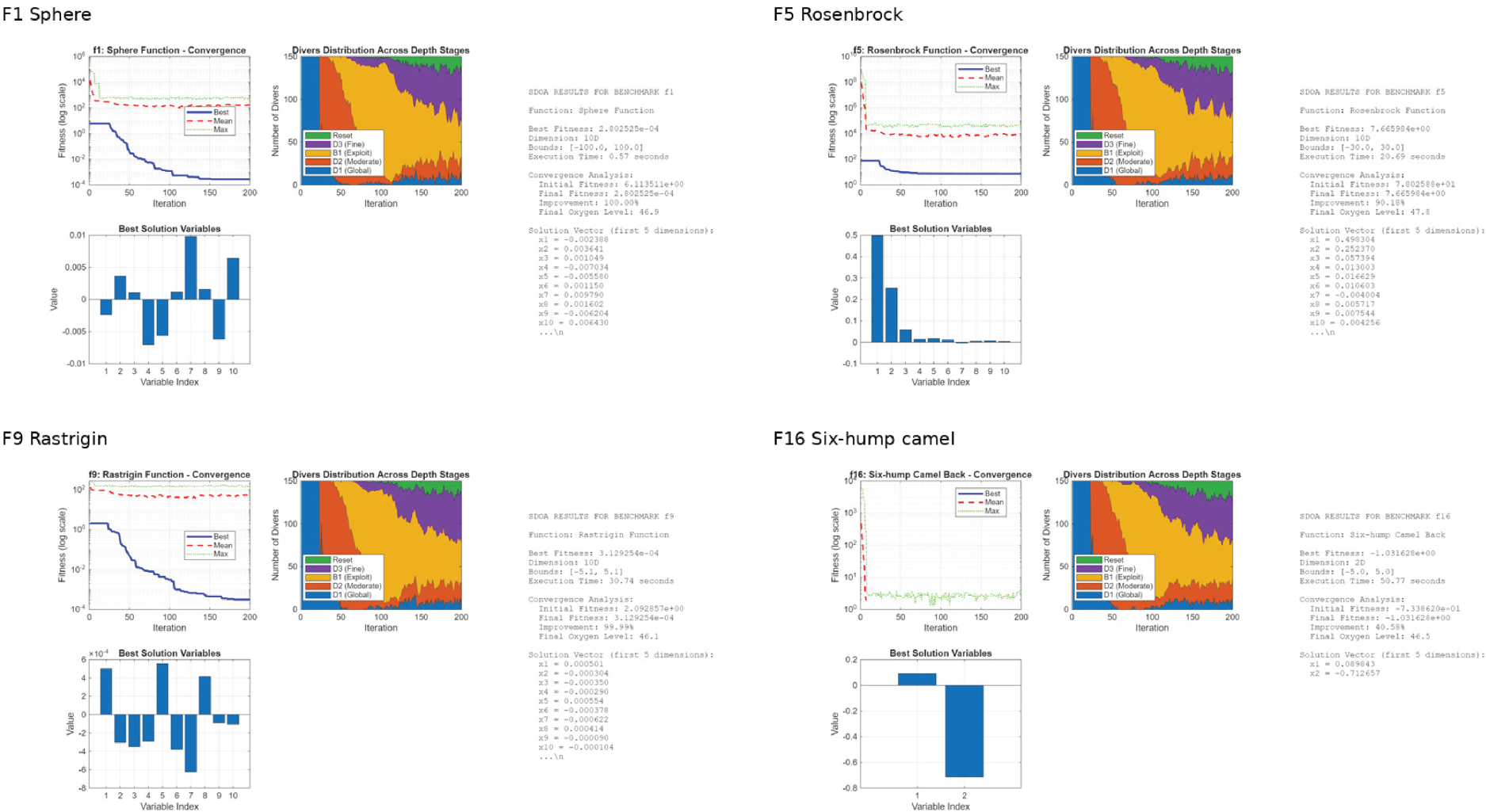
Representative convergence behavior of SDOA on selected mathematical functions within the integrated validation corpus.
Taken together, the engineering-design and mathematical benchmark results support a bounded but stronger interpretation of SDOA. The engineering problems demonstrate feasibility-aware constrained performance, while the 23-function suite provides broader evidence that the oxygen-regulated state mechanism remains effective across heterogeneous mathematical landscapes. The claim is therefore deliberately limited: SDOA is a competitive and robust state-regulated optimizer, but full generality across official CEC constrained competitions should be established through future paired multi-algorithm experiments.
Tables 26 and 27 reorganize the empirical evidence around sensitivity and computational cost. The aim is to make the effect of SDOA's own parameters visible rather than to rely on one best configuration. Population size and iteration count primarily influence computational budget, while current strength, mutation rate, oxygen level, oxygen decay, and elite size influence behavioral regulation. The results show that longer budgets generally reduce dispersion, but the strongest improvements occur when additional evaluations are accompanied by suitable oxygen decay and reset pressure rather than by larger populations alone.
Scenario-level sensitivity and runtime summary for SDOA.
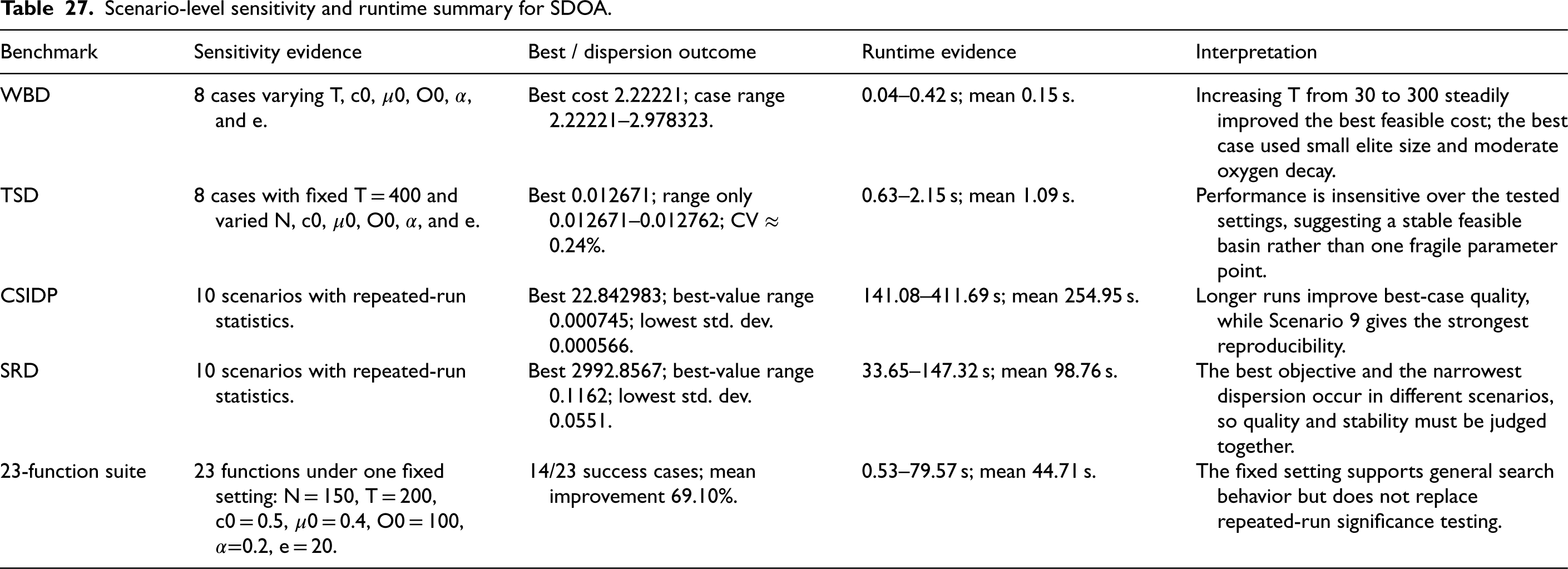
Scenario-level sensitivity and runtime summary for SDOA.
Empirical SDOA runtime summary across the evaluated benchmark groups.
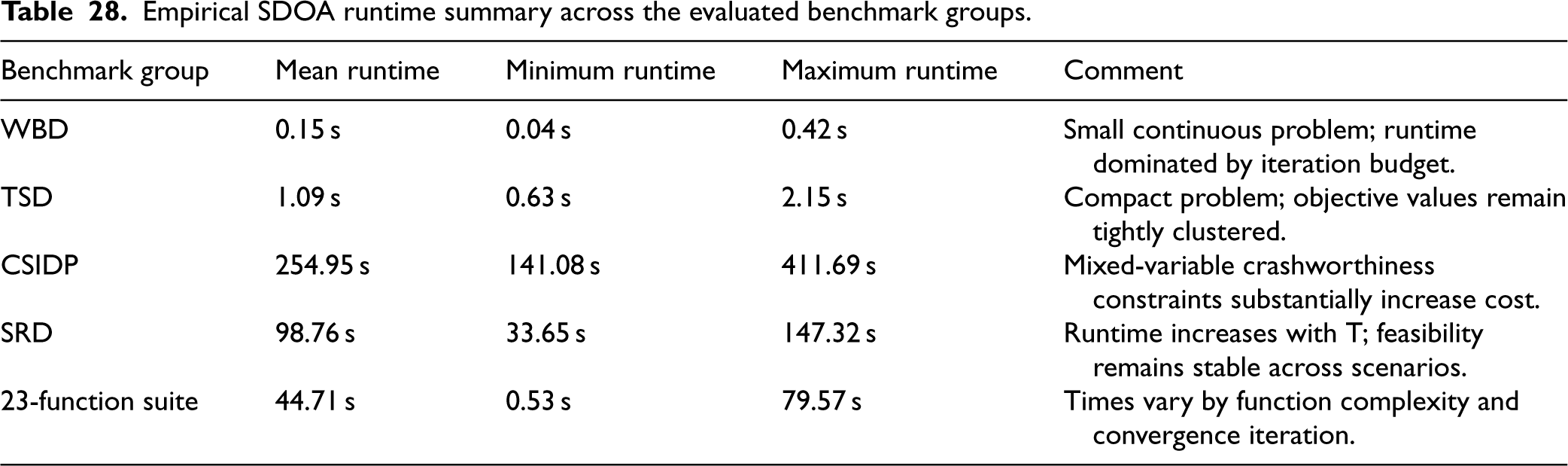
The runtime evidence clarifies the practical cost of SDOA. The compact engineering benchmarks are inexpensive, whereas CSIDP and SRD require longer runs because they involve narrower feasible regions and more demanding constraint evaluation. Runtime is therefore treated as an evaluation criterion rather than as a secondary implementation detail.
A complete empirical runtime comparison with all competing methods is not claimed because the available historical comparator studies do not uniformly report hardware, implementation language, stopping tolerance, random seeds, or raw execution logs. The manuscript therefore reports SDOA runtime transparently and defines the conditions required for a fair runtime comparison: identical programming environment, identical function-evaluation budget, identical feasibility tolerance, and the same number of independent runs.
Confidence intervals and coefficient-of-variation indicators for selected repeated-run scenarios.
Confidence intervals and coefficient-of-variation indicators for selected repeated-run scenarios.

Approximate statistical comparisons and limits of significance testing.
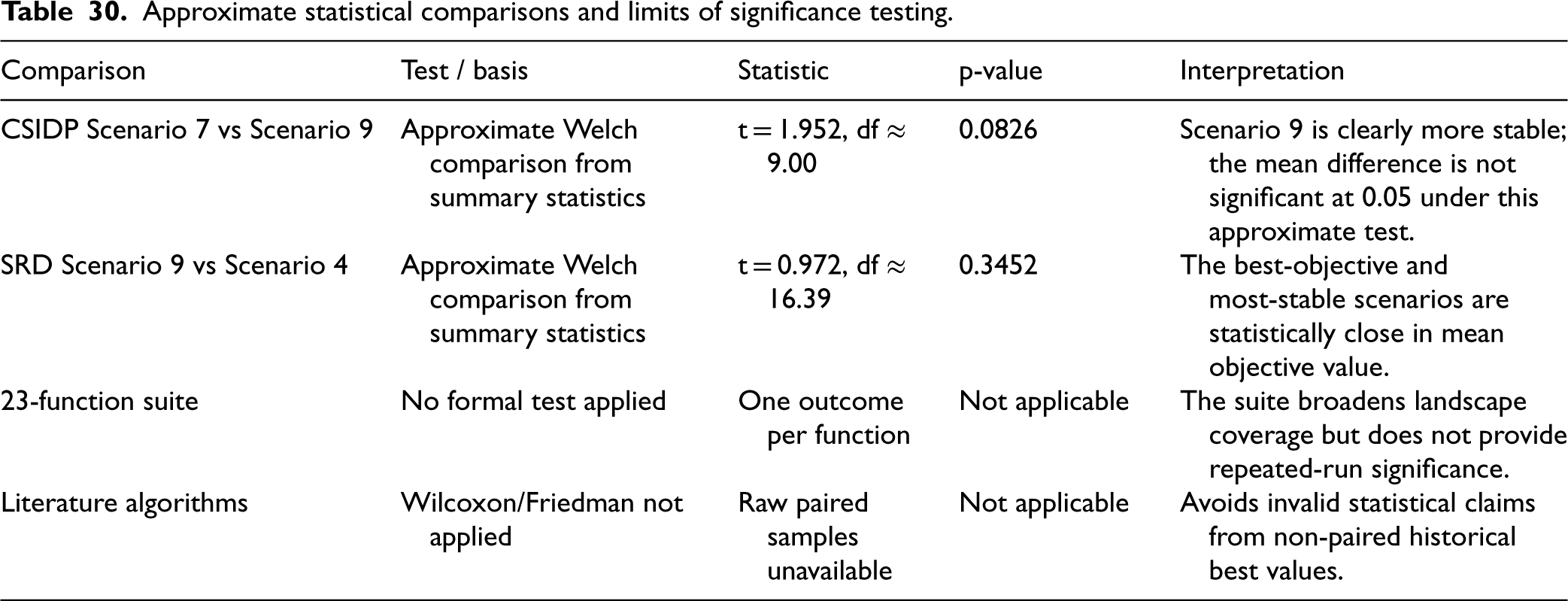
This statistical treatment strengthens the interpretation in two ways. First, it shows that SDOA's best values on CSIDP and SRD are accompanied by narrow dispersion under several settings. Second, it prevents overclaiming: historical best-value tables are retained as contextual references, while formal significance testing is reserved for datasets that satisfy the assumptions of paired repeated-run analysis.
Mechanism-level ablation interpretation of the oxygen-regulated SDOA design.
Mechanism-level ablation interpretation of the oxygen-regulated SDOA design.
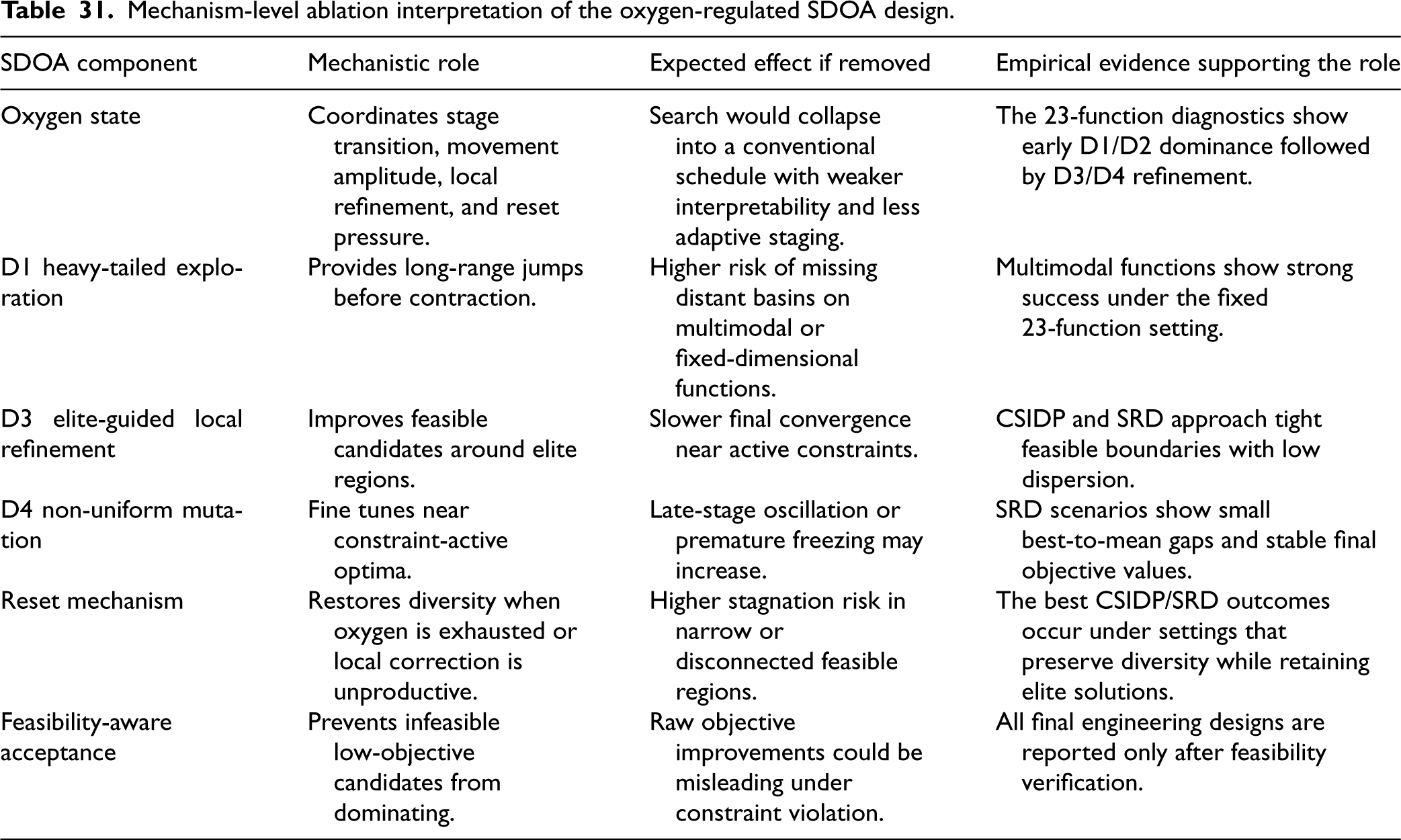
This analysis explains why the oxygen mechanism is more than a metaphor. Oxygen acts as a state variable that couples diversification, intensification, and recovery. The most important implication is asynchronous stage occupancy: different divers can search globally, refine locally, or reset at the same iteration. This produces a population-level mixture of transition kernels, which differs from a single population-wide coefficient schedule. Constraint handling also benefits because infeasible or stagnant agents can be redirected without forcing the entire population to abandon promising feasible regions.
The results are interpreted through six complementary lenses: best feasible objective value, feasibility verification, dispersion and confidence intervals, parameter sensitivity, runtime cost, and mechanism-level behavior. This organization prevents the discussion from depending primarily on isolated best outcomes. On WBD and TSD, SDOA should be read as feasible and competitive. On CSIDP, the distinction between Scenario 7 and Scenario 9 separates peak performance from repeated-run stability. On SRD, the method shows its strongest constrained-design behavior, while the manuscript still avoids universal superiority claims because several comparisons are literature-derived. On the 23-function suite, the fixed setting across all functions reduces the risk of problem-by-problem parameter overfitting and identifies opportunities for future adaptive threshold learning (Figure A1, Table A4).
Limitations and threats to validity
Several threats to validity should be considered when interpreting the results. First, not all comparator algorithms were rerun under identical computational budgets, software environments, random-seed protocols, stopping criteria, and feasibility tolerances. Consequently, literature-based comparison tables should be read as benchmark-positioning evidence rather than as fully controlled head-to-head statistical tests.
Second, WBD and TSD are supported mainly by scenario-level evidence, whereas CSIDP and SRD include repeated-run summaries. This difference in evidence strength is reported explicitly to avoid treating all benchmark layers as statistically equivalent. Third, the 23-function suite provides useful landscape-diversity evidence but does not replace an official CEC constrained-optimization competition. Future work should therefore evaluate SDOA using paired repeated runs, identical function-evaluation budgets, common feasibility tolerances, and formal non-parametric tests such as Wilcoxon signed-rank and Friedman procedures with appropriate post-hoc correction.
Conclusion
This study reformulated the Scuba Diver Optimization Algorithm as an oxygen-state-regulated metaheuristic for constrained and continuous optimization. The principal contribution is the use of oxygen as an agent-level state variable that coordinates exploration, exploitation, elite communication, local refinement, and reset. This design provides an interpretable alternative to purely iteration-driven schedules and supports asynchronous stage occupancy within the same population.
The integrated validation corpus combines four constrained engineering benchmarks with twenty-three mathematical functions. The engineering results show that SDOA is feasible and competitive on WBD and TSD, near-best among feasible methods on CSIDP, and strongest on SRD within the reported comparison set. The mathematical-function component further indicates that the same search mechanism can operate across heterogeneous landscapes without function-specific retuning.
The empirical evidence is intentionally interpreted with caution. The study reports repeated-run dispersion, confidence intervals, runtime diagnostics, and sensitivity evidence where available, but it does not claim a fully controlled multi-algorithm competition against every recent optimizer. Literature-based comparisons are therefore used for benchmark positioning, whereas formal statistical superiority claims are reserved for settings with paired repeated-run samples.
The results suggest that SDOA is most valuable in constrained problems where feasibility recovery, diversity preservation, and controlled local refinement must be coordinated. Its strongest contribution is not a claim of universal dominance, but a transparent search-governance architecture that links diversification, intensification, and reset through a single internal state.
Future research should extend SDOA to official CEC constrained benchmark suites, simulation-driven engineering models, surrogate-assisted optimization, multi-objective formulations, and discrete or categorical decision spaces. Additional work should also examine adaptive learning of oxygen thresholds, operator-level ablation under paired random seeds, and fully controlled comparisons with recent adaptive and hybrid metaheuristics.
Footnotes
Ethics approval
Not applicable. The study involves benchmark optimization problems only and does not include human participants, animals, or identifiable personal data.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Author contributions
Saman M. Almufti conceived the study, developed the algorithmic framework, implemented the computational models, and conducted the experiments. Amira Bibo Sallow contributed to benchmark formulation, validation, analysis of results, and manuscript preparation. Both authors approved the final manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Availability of data and materials
All data analyzed in this manuscript are contained in the manuscript tables and in the associated MATLAB outputs used to prepare the benchmark studies. The benchmark-specific implementations have also been made available by the authors through MATLAB Central File Exchange in the underlying case-study materials.
Supplemental material
Supplemental material for this article is available online.
Appendix A. Reproducibility Evidence
This appendix provides compact supporting evidence for reproducibility without duplicating all raw experimental files. It reports the best parameter settings, best feasible design vectors, statistical evidence where repeated runs are available, representative feasibility checks for the four engineering problems, and function-level results for the 23-function mathematical benchmark suite.
The full convergence histories, scenario-specific plots, and feasibility tables remain in the supporting files. The appendix includes only the representative evidence needed to make the main manuscript reproducible and self-contained.