
Abstract
Over the years, numerous optimization problems have been addressed utilizing meta-heuristic algorithms. Continuing initiatives have always been to create and develop new, practical algorithms. This work proposes a novel meta-heuristic approach employing the slender Loris optimization algorithm (SLOA), miming slender Loris behavior. The behavior includes foraging, hunting, migration and communication with each other. The ultimate goal of the devised algorithm is to replicate the food-foraging behaviour of Slender Loris (SL) and the quick movement of SL when threatened (i.e.) their escape from predators and also mathematically modelled the special communication techniques of SL using their urine scent smell. SLOA modelled SL’s slow food foraging behaviour as the exploitation phase, and moving between the tree and escaping from a predator is modelled as the exploration phase. The Eyesight of slender Loris plays a vital role in food foraging during nighttime in dim light. The operator’s Eyesight is modelled based on the angle of inclination of SL. The urine scent intensity is used here to be instrumental in preventing already exploited territory activities, which improves algorithm performance. The suggested algorithm is assessed and tested against nineteen benchmark test operations and evaluated for effectiveness with standard widely recognized meta-heuristics algorithms. The result shows SLOA performing better and achieving near-optimal solutions and dominance in exploration–exploitation balance in most cases than the existing state-of-the-art algorithms.
Keywords
Introduction
The meta-heuristic optimization algorithms are typically inspired and derived from the behaviour of nature. Recently, numerous search tactics have been successfully included in meta-heuristic processes; these tactics are naturally drawn from nature by simulating the laws of ecology, physical science or swarm intellect. The bio-inspired algorithm become very popular among the research community. Swarm-based methodologies have been extensively employed to address real-world predicaments efficiently. These algorithms can solve optimization and computational intelligence problems [1, 2]—the benefits of meta-heuristic algorithms over typical conventional algorithms [3, 4]. Each meta-heuristic approach acts in its own way when resolving problems reliant on the natural phenomena they emulate. Since no single algorithm can provide the best solution to every problem, creating a novel, high-performance and efficient algorithm that can handle particular issues is needed. The free lunch rule hypothesis (NFL) constantly develops improved meta-heuristic algorithms to solve complex and significant optimization challenges. So, in recent times, several bio-inspired optimization algorithms have witnessed exponential growth. Some of the eminent and efficient meta-heuristic algorithms are the Genetic Algorithm (GA) [5], ant colony optimization (ACO) Algorithm [6], bee colony algorithm(BCO) [7], particle swarm optimization (PSO) [8] and more. The majority of the optimization meta-heuristic algorithm was developed before the year 2000. Adaptability, robustness, efficiency, and self-learning are essential to bio-inspired algorithms.
Fundamentally, the meta-heuristic algorithms are divided into three categories: Algorithms based on evolutionary [9], algorithms inspired by swarm [10] behaviour, and physical-based algorithms [11]. The collective behaviour of the animal inspires the swarm algorithms. This divides the process into two categories: the exploration and exploitation phases. In exploration space, the algorithm searches for the possible solution search space, whereas efficiency and convergence towards a solution are evaluated in the exploitation phase. Most academics concentrate on creating algorithms that balance exploration and exploitation of the suggested method while also better searching the problem space. In general, metaheuristic algorithms have several operators and processes that perform differently when addressing optimization issues. According to NFL, there is no best single metaheuristic algorithm which performs well for all optimization problems. Finding the suitable method for each kind of optimization problem remains a difficulty. The aforementioned justifications encourage the development of novel metaheuristic algorithms to address various optimization issues.
The present study introduces a novel meta-heuristic algorithm known as the Slender Loris Optimization algorithm (SLOA), which emulates the distinct foraging behaviour of the slender Loris. Although numerous algorithms draw inspiration from the foraging and social framework observed in nature [12–15], Slender Loris’s distinct round vision and strange habit of urine scent communication have not been modelled as inspiration for optimization problems. The distinctive feature and communication exhibited by the Slender Loris distinguish it as the most diminutive nocturnal and give it a competitive edge over specific existing algorithms employed in this work. This paper’s primary novelty and contribution lies in the proposal and creation of this algorithm. The primary contribution of this work is expressed as follows: A novel swarm-based optimization algorithm, namely SLOA, is proposed to model the natural behaviour of slender Loris. The proposed algorithm is assessed against the nineteen familiar benchmark functions, including uni-modal, multimodal and fixed-dimension functions. The performance of SLOA in optimization problems is compared with well-established, recent meta-heuristic algorithms. The Performance of SLOA is assessed by applying conventional engineering design problems.
The reminder section of this paper is structured as follows: section 2 presents a literature survey of recently proposed meta-heuristic algorithms, section 3 gives the proposed Slender loris optimization (SLOA) model and inspiration, section 4 elucidates the experimental setup, presents the outcomes, and lastly, section 5 encapsulates the conclusion and prospective scope.
Related work
Swarm-based meta-heuristic algorithms are extensively applied in resolving optimization problems in several areas like engineering, science, finance and economics due to their ability to produce high-quality solutions with increased speed in complex search space. Various natural phenomena inspire the ideas in these algorithms, such as the collective social behaviour of animals, birds, fish, and insects, physics-based, chemistry-based on universal laws, from rules of games or any evolutionary process of nature.
Numerous established swarm algorithms such as ACO, PSO, and BCO have been extensively employed to achieve optimal solutions for many real-world challenges. Each proposed algorithm has its features and strengths. Several studies have been published comparing these swarm-based algorithms with traditional optimization results and have proven the outperforming efficiency of swarm-based algorithms in various factors like solution quality, convergence speed, and robustness [16–18]. The recently proposed algorithms have been applied to solve various optimization issues with variable performance degrees. Table 1 shows examples of newly proposed swarm-based meta-heuristic algorithms [19–33]. Meta-heuristic Algorithms are not only inspired from nature; there are some non-nature-inspired meta-heuristic algorithms like Harmony search [34], Tabu search [35], and Iterated Local Search [36].
Recent Swarm-based meta-heuristic algorithm
Recent Swarm-based meta-heuristic algorithm
Another method by which researchers suggest new or enhanced algorithms is through hybridizing metaheuristic techniques. A nature-inspired metaheuristic-optimized convolutional neural network model was used to characterize anomalies in breast cancer images [37]. Harris Hawk’s optimizer is used to select prominent features to improve the performance of cancer disease classification accuracy [38]— the Chaotic Oppositional Based Whale Optimization Algorithm (CO-WOA) [39] for the classification of fish images.
In retort to the success of these proposed algorithms, each has limitations like computational cost, sensitivity to the initial condition, struck in local optima and more. Researchers have striven to enhance the efficacy of algorithms by refining the balance between exploration and exploitation and reducing the limitations mentioned above. This reason plays a motivation for the proposed novel SLOA.
This segment explores the general framework of the devised algorithm. The proposed Slender Loris Optimization Algorithm (SLOA) inspired the behaviour of Slender Loris, which is based in Tamil Nadu, India. The behaviour includes foraging, hunting, migration and communication with each other. The mathematical description of the algorithm is also given below.
Inspiration
The slender Loris is from a lorisinae family member. The Loris is nocturnal and arboreal and sleeps or spends most of its time around trees. In general, the Loris identified using their eyes. Hence, the eyes are more significant than other animals and enriched by dark black circles. They can quickly move on and between the trees with great confidence and deliberation [40] and hang in it using their feet most of the time. While riding, the Loris grasps the tree branches and food, as shown in Fig. 1. The biological name of red slender is Loris tardigradus, and the brown is L. lydekkerianus. The origin of Loris is South India and Sri Lanka [40, 41].
Loris grasps the branches of the tree.
As it is a nocturnal animal, Identifying the social structure is challenging because Loris is alone mainly rather than in a group of others [42]. The communication between Loris is based on space and time. The inter-communication between Loris, sleeping habits, and inter-sexual relations is based on Loris’s social organization derived from the characteristics [43, 44]. The means of communication among individuals is facilitated through urine scent marks, which serve the dual purpose of claiming territory and advertising one’s reproductive status to fellow group members [45].
The slender loris optimization is a population-based algorithm, an iterative process based on a trial-and-error method. The slender loris optimization (SLOA) has the following phases: Initialization, Climb process and Jump-to process. Figure 2 represents the behaviour of the exploration and exploitation phase.

Behaviour of Slender Loris.
The initialization of the Slender loris is as follows:
Here, we assume a zone containing probable optimal solutions may be identified beforehand. Because the computer can readily sample points from a hypercube, this region is typically constructed to have a pleasing shape, like an n-dimensional hypercube. The hypercube is then used to generate a random point.
The initialization of SLi is as follows:
Where: B(0,1) →Random number between 0 and 1.
SLmin → lower bound of SL
SLmax → Higher bound of SL
The climbing process is essential for the devised algorithm to change the existing position of Slender loris. Initially, the slender Loris is in one place called the initialization point. Later, the slender Loris moved to random sites based on the climbing process. The objective function will be changed based on the slender loris random move (as for the gradient-based algorithm). The recursive optimization algorithm is interesting and proliferating. Recursive algorithms like SPSA (simultaneous perturbation stochastic approximation) do not need direct gradient information [46]. The SPSA algorithms use the approximation gradient value of the objective function. In the climbing process, we derive the concept from SPSA; hence, this algorithm is appropriate for high-dimension optimization problems [47].
The climbing process of slender Loris is as follows:
The slender loris(i), the position of ith slender loris is xi = (xi1, xi2 … xin)
(Where i = 1,2,3 … n)
Step 1: Δxi is a random vector generation number.
Δxi = (Δxi1, Δxi2, … . Δxin)
The number of steps in the climb procedure is calculated based on the parameter α.
Step 2: Calculate the objective function
Step 3:
Step 4: Modify the function mentioned above
Step 5: redo steps 1 to 4 till changes appear in the objective function or reach the climb maximum position.
If Slender Loris fitness increases after a move, this indicates that the algorithm is moving in the right direction. The algorithm can then use this information to update its search direction, guiding it towards the optimal solution. The objective function serves as a feedback mechanism, allowing the algorithm to assess its progress and make informed decisions about its search direction.
After climbing to the tree, the slender Loris looks at the environment. The Loris are checking the tree, whether it’s climbing the top of the tree or not. If still not at the top, the Loris jump to the top position. The Eyesight of the slender Loris plays the role here in attaining the top and safe position.
The slender loris’ Eyesight can be described by ɛ (the maximum distance covered by slender Loris). Let us consider the Loris i. (i = 1, 2 … M)
Here, each slender Loris’s fitness probability is computed using an objective function, and the best SL is chosen by employing the following formula.
The next location of slender Loris gets updated depending on the best Slender Loris with the best fitness value and Eyesight of SL. The position of Loris with the best vision (ɛ) and the position of Loris with the best fineness is used to update for the next location. The Eyesight of slender Loris plays a vital role in food foraging during nighttime in dim light. Here, the operator Eyesight is modelled based on the angle of inclination of SL and pupil area size depicted in Fig. 3.
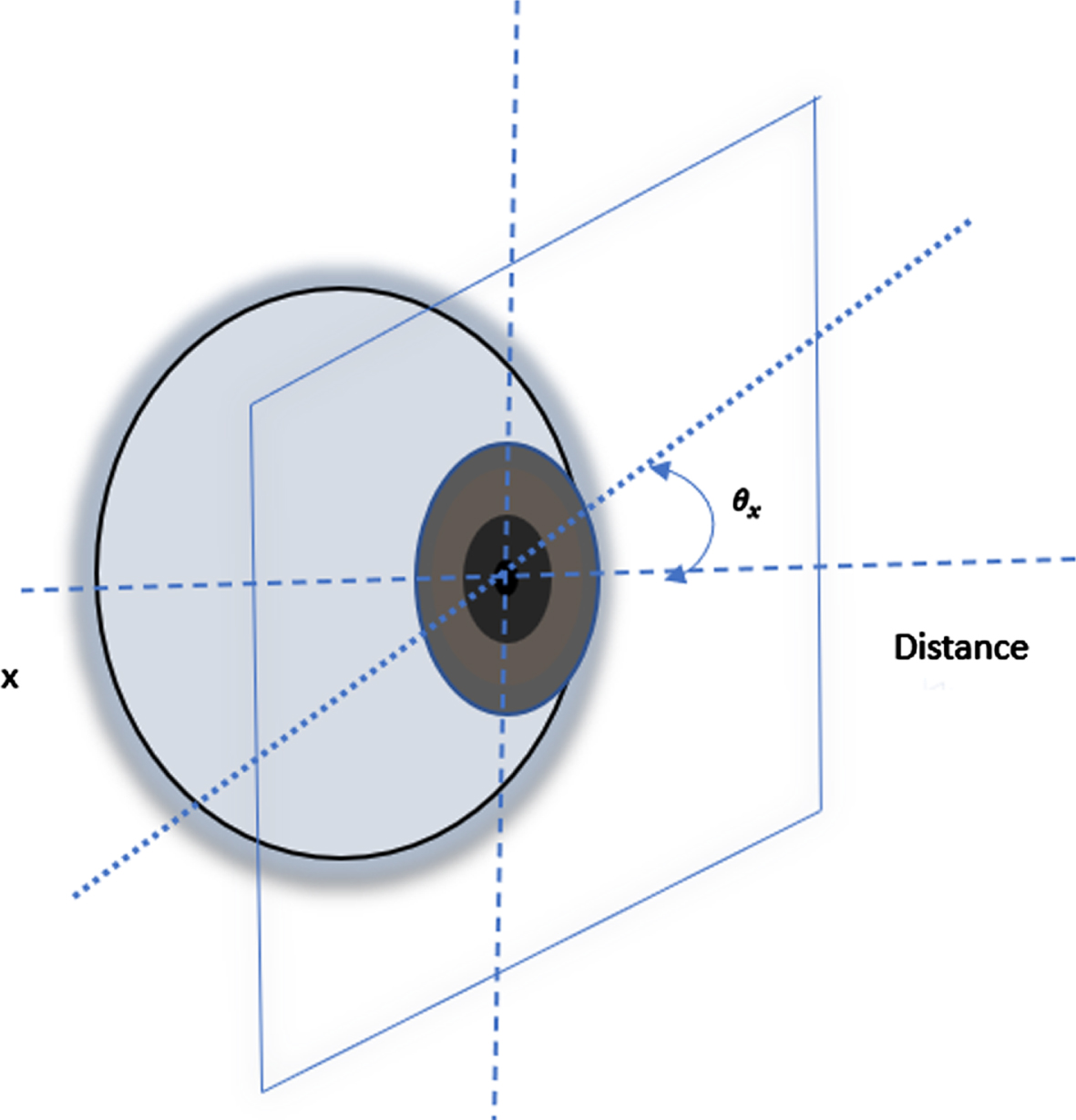
Slender loris Eye angle of inclination.
Where, θ x is the normal angle, and p x is the pupil area size of the SL.
In the SLOA algorithm, slender lorries’ urine scent intensity value is modelled as scent intensity function. SLτ
ij
. Slender lorries use their urine scent to communicate with one another and prohibit other males from entering their territory. The algorithm is intended to boost the intensity of the smell for solutions that have been visited, thereby increasing their appeal and encouraging the process of exploitation.
Where, BestSL ij is the position of best slender Loris with the best fitness score
ɛ - eyesight operator function which returns slender Loris with the best vision from Equation (5)
rand (0,1) – a random number in the range 0 to 1
SLτij is the urine scent value of the best SL
scent intensity of the new solution will be updated based on the following equation
ρ – Evaporation rate between 0 and 1
Δ τ – an increment in scent intensity
The urine scent intensity is used here to be instrumental in preventing already exploited territories activities and redirecting the swarm to unexplored territories.
The SL searches enough of the tree for food, and if it reaches the top, it will swap to another territory in search of food. Here, it is modelled as exchange parameter T for the transition from exploitation to exploration phase, where the searching process begins randomly.
The exchange parameter, T, determines the dynamic randomization process that governs the shift from exploitative exploratory behaviour. The parameter T exhibits a decreasing trend with each subsequent iteration, thereby contributing to a reduction in the level of randomization over time using Equation (8)
C is the Natural number constant,
c_itr and Max_itr are current and maximum iterations.
The Slender Loris algorithm’s exploration operators examine the search area randomly in several places and try to find a better solution using two primary search techniques, Division and Multiplication search strategy, as in Fig. 4. We have two operators, D and M. D denotes the division search strategy, and M represents the multiplication division strategy. If the random number r1 is < 0.5, the Multiplication operator is applied to perform updating; otherwise, the Division operation is used for updating. The SLOA algorithm exploration updating equation is given by
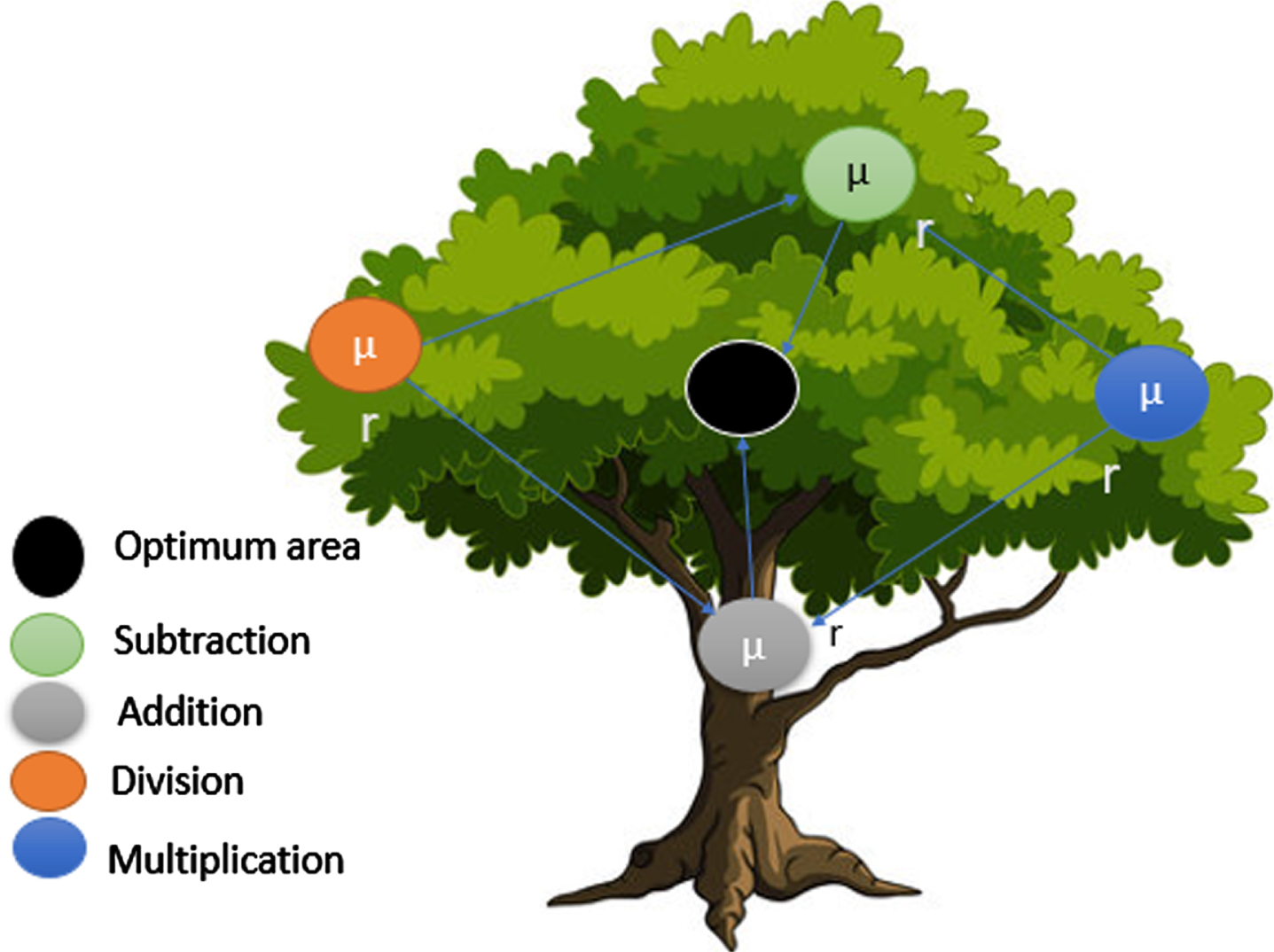
Model on Position updation.
Where SL
best
The best solution found so far, μ - control parameter to adjust the process, with the default constant value set to μ= 0.4.
The nineteen well-known benchmark functions are utilized to assess the efficacy of the devised slender loris algorithm. The outcome was compared with four meta-heuristic algorithms. The proposed algorithm was implemented using MATLAB.
Benchmark test functions
To validate the performance of SLOA, nineteen benchmark problems are evaluated, which are categorized into three classes. Uni-modal Multimodal Fixed dimension function
f1-f9 (Unimodal function), f10-f16(Multimodal function), (f17-f19) fixed dimension function. The details of the benchmark function used here are referred from [48]. They made an effort to offer the most thorough and concise list of established benchmarks or test routines to validate optimization algorithms. The properties and mathematical formulations of benchmark functions we took for our work are listed in Table 3. D represents the function dimension, R represents the search space boundary, and f(x) represents the optimal value of the objective function.
Uni-modal and Multimodal functions
Uni-modal and Multimodal functions
The efficacy of the proposed SLOA algorithm is evaluated against the four major existing algorithms. The Particle Swarm Optimization (PSO) [49] methodology is a widely accepted and established approach for optimization, known for its demonstrated effectiveness and versatility. The whale Optimisation Algorithm (WOA) [50] is an innovative optimization technique inspired by the social behaviour of humpback whales. Its unique exploration-exploitation balance provides valuable insights into animal-inspired strategies in optimization.in such a way, we also took Elephant Herding Optimization (EHO) [51] and Rhinoceros Search Algorithm (RSA) [52] as baseline algorithms to offer a comparative evaluation of different social-based strategies. Table 4 gives various parameters used in the baseline algorithm for implementation. Every method has 30 independent runs to confirm its robustness, with the population size (n) set to 30 and the maximum iterative number (max_itr) set to 50.
Parameter setting
Parameter setting
One crucial indicator of proposed SLOA performance is its computational complexity, which comprises three processes: initialization, Objective function evaluation and apprising of scent function and position of SL’s. The initialization process for Slender Loris has a computational complexity of O(n). During the exploitation phase, the algorithm moves towards solutions with better objective function value O(OBF) after the climbing process (CP). To avoid revisiting previously explored regions, the algorithm incorporates scent communication, which assigns higher scent values to solutions that have been visited more frequently, discouraging the algorithm from revisiting these areas τ. The computational complexity is calculated as O(OBF) + O(max_itr×CP× τ). Thus, the overall computational complexity of SLOA is T(n) = O (n + OBF+ max_itr×CP× τ).
Results comparison
The proposed SLOA algorithm is compared with the meta-heuristic algorithms, and the results are presented in Table 5. Comparison graphs are shown in Fig. 5. The unimodal function (f1-f9) discloses the performance of the exploitation, (f10-f16) Multimodal function can undermine the capacity for exploration by having many local optimum regions where, as (f17-f19) fixed dimension function utilized to assess the balance between exploration and exploitation in metaheuristic algorithms. From the nine unimodal functions in Table 4, SLOA outperforms in five functions (f1, f5 - 6, f8 - 9). We can conclude that SLOA’s great exploitation potential is confirmed in unimodal functions. Apart from SLOA, EHO secured the second plan by outperforming in two unimodal functions. From the result, it can be inferred that both SLOA and RSA performed well for multi-model benchmark functions. The result from the fixed dimension function shows that SLOA performs well in exploration and exploitation balance. In summary, the suggested SLOA algorithm was shown to be the effective approach overall since it was able to identify the global optimum position more quickly than the other approaches in most cases that were chosen.
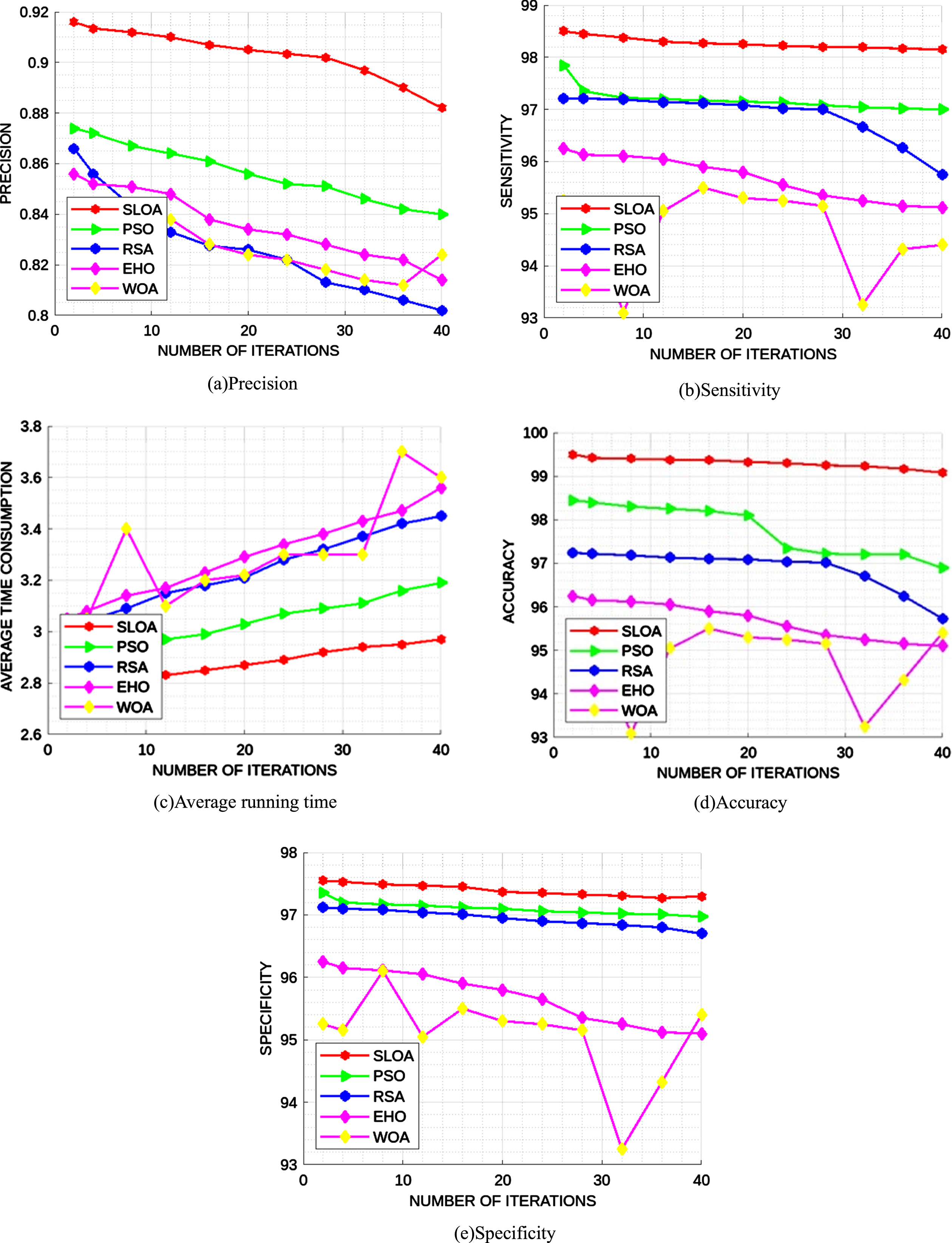
Performance Metrics.
Statistical Results
However, like many other suggested algorithms, there is no assurance that the computed solution of the SLOA is the best one for all cases. One limitation of SLOA is that scent function updates can introduce additional computational overhead. Updating scent values and incorporating scent information into the movement strategy can increase the algorithm’s computational complexity. Also, SLOA shows lower convergence for noisy objective values.
Over the past years, many meta-heuristic algorithms have been developed. Most of the algorithms are derived from nature/animal behaviour. In this paper, we use the Slender Loris Optimization Algorithm (SLOA), which inspired the behaviour of the Slender Loris animal. The SLOA was Constructed based on the Searching and communication behaviour of Indian slender Loris. We tested SLOA with 19 benchmark functions (uni-modal, multi-model, and fixed-dimension functions) to evaluate the algorithm’s performance. The outcome of the SLOA is compared with other existing PSO, RSA, WOA and EHO algorithms. From the experimental results of 20 and 50 iterations, the proposed SLOA outperformed well compared to different existing algorithms. The SLOA was also tested to solve two engineering optimization problems (Spring design and Welded beam). The simulation results demonstrate that the SLOA effectively solves engineering optimization challenges. The following findings are supported by the analysis and explanation of the experiments, which are based on the preceding results: Exploitation behaviour is effectively achieved by eyesight vision function, by directing individuals to identified promising regions. SLOA uses the scent value function, which prevents population individuals from repeatedly exploring the over-exploited region of the search space. As a result, SLOA improves the chances of discovering even better solutions as the search progresses. SLOA offers a good ability to balance the exploration and exploitation phase by employing a smooth transition.
The slender loris algorithm can be tested in combination problems in the future. The binary form of SLOA can be examined in our upcoming work to address distinct issues. SLOA can also be used with several learning operators, including opposition-based learning and comprehensive learning. Additionally, SLOA can be extended to address diverse optimization issues across multiple domains like feature selection, route optimization, neural networks and so on.