
Abstract
Bayesian inference provides a powerful approach to system identification and damage assessment for structures. The application of Bayesian method is motivated by the fact that inverse problems in structural engineering, including structural health monitoring, are typically ill-conditioned and ill-posed when using noisy incomplete data because of various sources of modeling uncertainties. One should not just search for a single “optimal” value for the vector of model parameters but rather attempt to describe the whole family of plausible model parameters based on measured data using a Bayesian probabilistic framework. In this article, the fundamental principles of Bayesian analysis and computation are summarized; then a review is given of recent state-of-the-art practices of Bayesian inference in system identification and damage assessment for civil infrastructure. Discussions of the benefits and deficiencies of these approaches, as well as potentially useful avenues for future studies, are also provided. Our focus is on meeting challenges that arise from system identification and damage assessment for the civil infrastructure but our presented theories also have a considerably broader applicability for inverse problems in science and technology.
Keywords
Introduction
In the last few decades, worldwide efforts to implement structural health monitoring systems on civil infrastructure have produced large amounts of data. This abundance of data has motivated the development of an increasing number of data processing (information extracting) techniques to understand the behavior and performance of civil infrastructure under real environmental conditions. These computer-based techniques, developed in system identification research (e.g. Beck, 2010; Ghanem and Shinozuka, 1995; Sirca and Adeli, 2012), are key components in model-based inversions for damage detection and assessment. Here, system identification refers to the inverse problem of finding a mathematical model of the structural system on the basis of measured data. However, there are always some challenges encountered in system identification. One challenge is that sensors are typically installed at only a limited number of locations, so that we are unable to resolve detailed spatial information about the structure. In addition, there are always modeling uncertainties involved because of sensor noise, inadequate theory for certain system behaviors, simplifying approximations for developing structural models, thermally induced variations in structural properties, and so on. Due to these facts, no model is expected to exactly represent the system input/output (I/O) behavior.
Inverse problems in structural system identification are typically ill-conditioned and ill-posed when treated deterministically because there is insufficient information in the collected data to precisely determine a model within a realistic class of structural models. One commonly employed approach to handle this difficulty involves regularized parameter estimation approaches, such as Tikhonov regularization (Tarantola, 2005), where a regularization term is added to the data-matching term in the objective function to be minimized. However, the relationship of the resulting unique solution to the solution of the original unregularized inverse problem is uncertain.
The presence of substantial modeling uncertainties suggests that when solving inverse problems in structural system identification, the objective should not be limited to the search for single “optimal” parameter vector. Instead, an attempt should be made to describe the family of all plausible values of the model parameters based on the available data. Bayesian inference provides a general, rational, and robust tool that is capable of handling the difficulty of non-unique solutions (Beck, 1989; Beck and Katafygiotis, 1991, 1998; Katafygiotis and Beck, 1998). It treats the parameter estimation problem using Bayes’ theorem to determine the posterior distribution for the parameter vector based on the available data. Probability in the Bayesian perspective represents a degree of plausibility of an uncertain proposition conditional on stated information (Cox, 1946; Jaynes, 1957, 2003; Beck, 2010). The proposition may refer to events, structural model parameters or even the model itself. The posterior distribution therefore quantifies the updated relative plausibility of the different values of the model parameters on the basis of the available incomplete information. Similarly, the posterior probability distribution obtained from Bayes’ theorem at the model class level can be used to quantify the plausibility of each model class within a set of candidate model classes for their consistency with both the observed data and the prior information.
The objective of this article is to review Bayesian inference approaches in system identification, especially structural damage assessment, including both vibration-based and wave propagation–based methods. By treating the damage assessment problem within a framework of plausible inference in the presence of incomplete information, the Bayesian framework provides a promising way to locate and assess structural damage, which may occur away from the sensor locations or be hidden from sight. Furthermore, being able to quantify the uncertainties of the structural model parameters is essential for a robust prediction of future safety and reliability of structural systems. This review starts with a section that introduces the underlying theory and perspectives of Bayesian analysis and computation. Section “Applications of Bayesian inference in system identification and damage assessment” gives a literature review for the application of Bayesian methods to real problems of system identification and damage identification for civil infrastructures. This section presents an end-to-end Bayesian framework that starts with building Bayesian models and ends with characterizing the final posterior distribution of the model parameters. Section “Sparse Bayesian learning and applications in structural damage assessment” introduces a recently developed hierarchical sparse Bayesian learning (SBL) methodology to perform sparse stiffness change inference based on the vibration data and to perform flaw (or defect) detection using wave propagation data. In the final section, some conclusions are drawn and suggestions for future research are provided.
Bayesian inference
Bayesian and Frequentist probability
In the area of statistical analysis, there are two broad categories of probability interpretations, namely “Frequentist” and “Bayesian” probabilities. Probability in the Frequentist definition is interpreted as the relative frequency of occurrence of an “inherently random” event in the “long run,” and probability distributions are considered as inherent properties of “random” phenomena (Mises, 1981 [1939]). However, this definition is not always operational because it requires well-defined “random” experiments that can be conceived as repeatable; for example, the probability of a model is not meaningful. It is also not practical for establishing distributions of multi-dimensional continuous variables because of the huge amount of effort that would be required for gathering the necessary relative frequencies in trials. Furthermore, the definition involves the concept of “inherent randomness” of events, which is assumed but cannot be proved (Beck, 2010, 2014).
In contrast, Bayesian probability quantifies the states of plausible knowledge about phenomena because of our limited capacity to collect or understand the relevant information, rather than the existence of “inherent randomness” in nature and the probability axioms can be derived as a multi-valued logic for quantitative plausible reasoning under uncertainty (Beck, 2010; Cox, 1946, 1961; Jaynes, 2003). These probability logic axioms provide a rigorous foundation for applying Bayesian inference. They incorporate not only parametric uncertainty (uncertainty regarding which model in a proposed set should be used to represent the system behavior), but also non-parametric uncertainty because of the existence of model prediction errors resulting from the approximate nature of any model. Under this interpretation, the probability of a model is a measure of its plausibility relative to other models within a set and one’s inferences regarding the relative plausibility of each model are updated through Bayes’ theorem as data evidences accumulate. Such a concept makes Bayesian inference more suitable for inverse problems in structural system identification than the Frequentist approach to inference.
Bayesian model updating
A key concept in Bayesian model updating for systems is a stochastic system model class

where
Bayesian model class assessment and Bayesian Ockham Razor
In system identification, we are often faced with the problem of choosing the most plausible model class from a set of competing candidates to represent the behavior of the system of interest based on the measured data

In the above,

Usually, the model classes are considered equally plausible a priori, that is,
The first term is the posterior mean of the log likelihood function, which is a measure of the average goodness-of-fit of the model class
Once Bayesian model class assessment is implemented, the most plausible model class based on the available data

Hierarchical Bayesian model and empirical Bayes method
The Empirical Bayes Method (Bishop, 2005) is an inference procedure in which the prior distribution of the model parameters
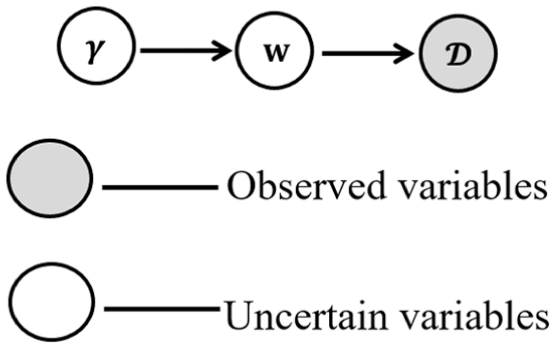
Graphical hierarchical model representation, where each arrow denotes the conditional dependencies used in the joint probability model,
However, the higher level involves the evaluation of a multi-dimensional integral over the space of hyper-parameters

where the MAP estimate

This procedure is sometimes called Empirical Bayes using Type-II Maximum Likelihood Approximation (Mackay, 1992; Tipping, 2004) when

For a Gaussian likelihood function that has a mean linear in
Useful Bayesian approximation tools
In Bayesian inference, the normalization of the posterior PDF is usually intractable because it involves a high-dimensional integral and so we must use approximations to proceed. In fact, the main computational issue in Bayesian analysis is the evaluation of multi-dimensional integrals. The normalizing constant
Laplace’s method of asymptotic approximation
Based on the topology of the likelihood function,
If the model class is globally identifiable based on

where
Markov chain Monte Carlo method
For the general case, Markov chain Monte Carlo (MCMC) samplers can be used. These algorithms generate samples that are consistent with any probability distribution (e.g. the posterior distribution
Several MCMC methods have been proposed with the goal of improving the computational efficiency of posterior sampling in Bayesian model updating of systems (e.g. Beck and Au, 2002; Beck and Zuev, 2013; Catanach and Beck, 2017; Cheung and Beck, 2009; Ching and Chen, 2007; Straub and Papaioannou, 2015). Most of these are based on the Metropolis–Hastings MCMC algorithm (Hastings, 1970). The advantage of the Metropolis–Hastings algorithm is that it can draw samples from any PDF

where j is the stage number and
Other recent popular techniques for Bayesian approximations are Approximate Bayesian Computation (ABC) methods (Chiachio et al., 2014; Marin et al., 2012; Vakilzadeh et al., 2017) and Variational Bayesian methods (Bishop, 2006; Fujimoto et al., 2011; Li and Der Kiureghian, 2017). ABC methods are applicable even when an analytical formula for the likelihood function (
Applications of Bayesian inference in system identification and damage assessment
Bayesian inference for accurately detecting, locating, and assessing damage from severe loading events or progressive structural deterioration has been studied for nearly two decades. Numerous techniques have been developed using the probability logic-based unifying Bayesian system identification framework presented in Beck (1989), Beck and Katafygiotis (1991, 1998), and Beck (2010). Typically, there are two categories of methods for structural damage detection: one is vibration based and the other is wave propagation based.
Vibration-based damage assessment using Bayesian inference
For vibration-based damage assessment, many methods utilize the dependence of the identified structural modal parameters, such as natural frequencies and mode shapes, on physical properties of structures, that is, stiffness, mass, and damping. On the other hand, other methods directly utilize the measured time-domain vibration response to infer the physical properties of structures. For small-amplitude vibrations, such as ambient vibrations of structures, it is reasonable to choose linear structural models with classical damping and to parameterize the uncertain stiffness matrix,

where
Modal-based Bayesian approaches
Bayesian inference for structural damage assessment first appeared in Vanik (1997), Vanik et al. (2000), and Sohn and Law (1997) using modal data information. In the framework presented in Vanik (1997) and Vanik et al. (2000), the likelihood function for the structural model parameters

where


where
Bao et al. (2013) employed this formulation for data fusion-based structural damage detection under varying temperature conditions. Here, the temperature change effects on the modal parameters were considered in the construction of the likelihood function for
One major difficulty for the approaches above is that mode matching is required, that is, it is necessary to match model modes (e.g.

Then Bayes’ theorem can be used to express the posterior probabilities of the uncertain parameters
For damage assessment of complex civil infrastructures, we would like to treat each structural member as a substructure so that we can infer which, if any, members have been damaged. Therefore, high-dimensional model parameter vectors

where
Yuen et al. (2006) introduced system frequencies
where
Time-domain Bayesian approaches
The other category of Bayesian damage assessment is the time-domain approach, which is particularly appropriate for situations with time-varying structural properties and a sequential dataset is observed. Typically, a stochastic state-space model is defined for the state time history

along with a state-to-output PDF

where
Bayesian pattern recognition methods
Closely related to artificial intelligence and machine learning, pattern recognition is another popular approach in structural damage detection and assessment. Lam et al. (2006) introduced a Bayesian artificial neural network (ANN) design method for pattern recognition-based damage detection, where an “optimal” ANN model class is automatically selected based on the set of ANN training data. In the ANN training process, the calculated features of damage-induced changes in Ritz vectors and corresponding damage scenarios in the structural model are treated as inputs and targets, respectively. The calculated features are defined by
where
Wave propagation-based damage detection using Bayesian inference
Wave propagation-based damage detection techniques, such as the Lamb wave method and ultrasonic NDT (non-destructive testing), are widely acknowledged as a most encouraging tool for quantitative identification of damage in civil engineering structures, and much research has been conducted intensively over the last several decades. The use of Bayesian inference in these approaches is also increasing, due to the fact that there are always unavoidable uncertainties in the measurement and modeling processes.
For Lamb wave methods, Ng et al. (2009) introduced a Bayesian framework to detect and characterize laminar damage in beam structures using guided wave signals measured at a single point. The uncertain model parameters

where
Regarding ultrasonic NDT, Wang et al. (2015) combined cluster analysis and Bayesian theory for assessing external corrosion location and depth in buried pipeline structures. Chiachio et al. (2017) presented a multilevel Bayesian approach for identifying Young’s moduli, number, and position of damaged layers in composite laminates using through-transmission ultrasonic measurements. Three steps were defined in their Bayesian inverse procedure: (1) inferring the posterior PDF

where

The most plausible damage hypothesis and pattern can be selected through the Bayesian model class assessment at different levels.
Sparse Bayesian learning and applications in structural damage assessment
In vibration-based damage assessment, there is a fundamental trade-off between the spatial resolution of the inferred damage locations and the reliability of the probabilistically inferred damaged state. In reality, the information available from the structure’s local network of sensors will generally be insufficient to support a member-level resolution of stiffness loss from damage. Accordingly, larger substructures consisting of assemblages of structural members may be necessary in order to reduce the number of model parameters. In this case, defining a proper threshold to determine whether the damage features shift from their healthy state is very important to alleviate false positive and false negative detections. However, it is very challenging to establish a reliable threshold value in a rigorous manner in order to issue a timely damage alarm (Sohn et al., 2005). A general strategy to alleviate this problem is to incorporate as much prior knowledge as possible in order to constrain the set of solutions; in particular, it is helpful to exploit the prior information that structural stiffness change from damage typically occurs at a limited number of locations in a structure in the absence of its collapse. Recently, by exploiting this prior knowledge about the spatial sparseness of damage, the effectiveness of sparse recovery techniques, for example, l1 norm least square regularization (Candes et al., 2006; Chen et al., 1999; Tropp and Gilbert, 2007) and SBL (sparse Bayesian learning) techniques (Tipping, 2001), have been explored to produce more robust damage assessment even for high-dimensional model parameter spaces (higher-resolution damage localization) (e.g. Hou et al., 2018a, 2018b; Huang and Beck, 2015, 2018a; Huang et al., 2017a, 2017b; Zhou et al., 2015).
In the field of guided wave/ultrasonic NDT signal processing for damage or defect detection, sparse signal recovery algorithms have also attracted increasing attention during the recent decade (Hong et al., 2006; Raghavan and Cesnik, 2007; Wu et al., 2017a, 2017b, 2018; Zhang et al., 2008). The prior information exploited in the application is that the object being inspected contains a limited amount of damage or defects, and so the measured signal should be a linear combination of echoes reflected from these damage or defects.
In this section, the recent progress of SBL-based structural damage detection and assessment is reviewed. The general theory of SBL is first introduced, and thereafter, the recently developed vibration-based SBL methods are discussed, followed by the wave propagation–based SBL methods.
Sparse Bayesian learning
In this section, we only briefly review the theory of SBL and refer to Tipping (2001) and Faul and Tipping (2002) for a more detailed description. It is supposed that the model prediction of the measured output is

along with uncertain model prediction error
The prior distribution for the parameter vector,
The key to the model sparseness is the utilization of the
The learning of the coefficient vector
with

where
Two optimization algorithms have been proposed in the SBL literature to find the MAP values
Huang et al. (2014) found that the SBL algorithm suffers from a robustness problem: there are local maxima for equation (29) that may trap the hyper-parameter optimization if the number of measurements
Sparse Bayesian learning methods for vibration-based damage detection and assessment
Hierarchical Bayesian model class
For damage detection purposes, the hierarchical Bayesian model in Figure 2 was presented in Huang and Beck (2015), where
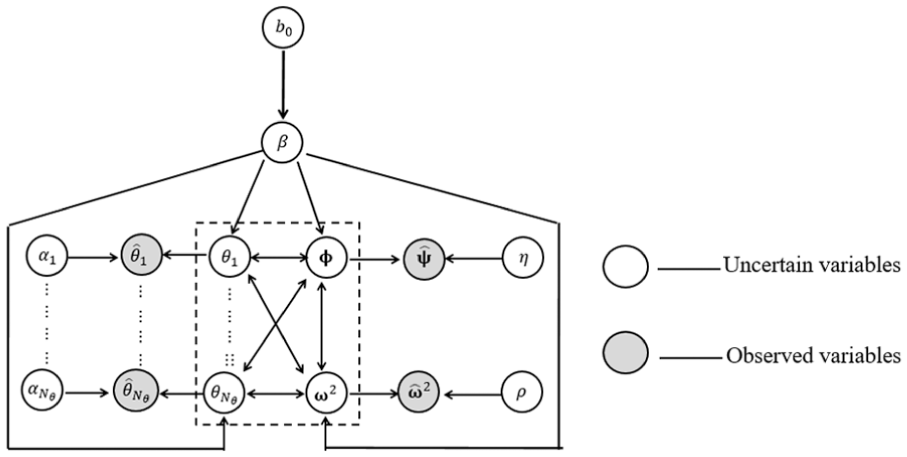
Hierarchical Bayesian model representation of the structural system identification problem.
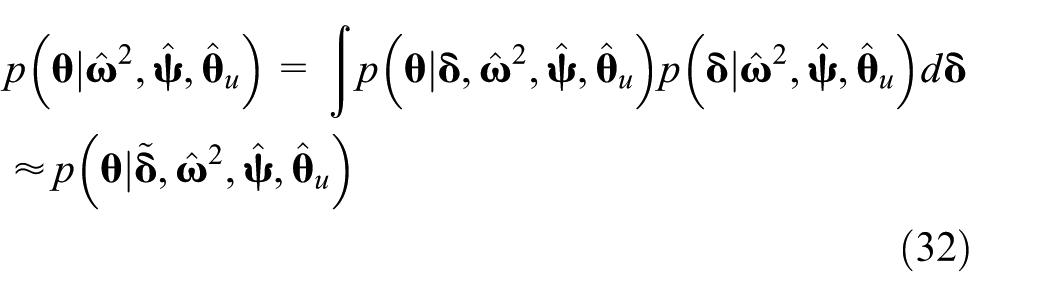
Although the system modal parameters
To promote model sparseness in the stiffness changes, the MAP value

where the hyper-parameters
Fast sparse Bayesian learning algorithm
Based on the hierarchical model in Figure 2, Huang et al. (2017a) proposed a fast sparse Bayesian learning algorithm that focuses on an analytical derivation of the posterior PDF of the stiffness parameters
where
Sparse Bayesian learning algorithms using partial Gibbs sampling combined with Laplace’s approximation
To provide a fuller treatment of the posterior uncertainty, it is necessary to avoid the Laplace approximation in the fast SBL algorithm that involves the system modal parameters,




are successively sampled to generate samples from the full posterior PDF
For the updating of stiffness scaling parameters
Full Gibbs sampling procedure for sparse Bayesian learning
In order to characterize the full posterior uncertainty, the GS is implemented to draw posterior samples from the joint posterior PDF
The full posterior uncertainty is characterized by first taking the generated samples,
Multi-task sparse Bayesian learning methods
Multi-task learning is a method that attempts to examine informative relationships or data redundancy between M different groups of measurements
where

This approach was applied to identify structural stiffness losses by exploiting a commonality among stiffness reduction models in the temporal domain, that is, the damage changes by a “small” amount over adjacent time periods. It has been shown that damage patterns are more reliably detected in both qualitative and quantitative ways by this sharing of related information using multi-task learning. Huang et al. (2018b) employed a multi-task SBL to adaptively borrow the respective strengths of two fractal dimension-based damage indices to acquire a unifying damage identification index.
Application to IASC-ASCE Phase II benchmark problems
The fast SBL algorithm with and without the sparseness constraint (Huang et al., 2017a) and the full GS SBL algorithm (Huang and Beck, 2018) were applied to the brace damage patterns in the IASC-ASCE Phase II simulated benchmark (Bernal et al., 2002) and experimental benchmark problems (Ching and Beck, 2003; Dyke et al., 2003). The benchmark structure is a four-story, two-bay by two-bay steel braced-frame. Results for the damage scenarios DP1B.ps (.ps denotes partial-sensor measurement, which are at the third floor and the roof) and Config. 5 from simulated and experimental benchmarks, respectively, are reported here. The stiffness scaling parameter vector
In Figures 3 and 4, all the samples generated from the full GS SBL algorithm (Huang and Beck, 2018), excluding those in the burn-in period (4000 samples), are plotted in the
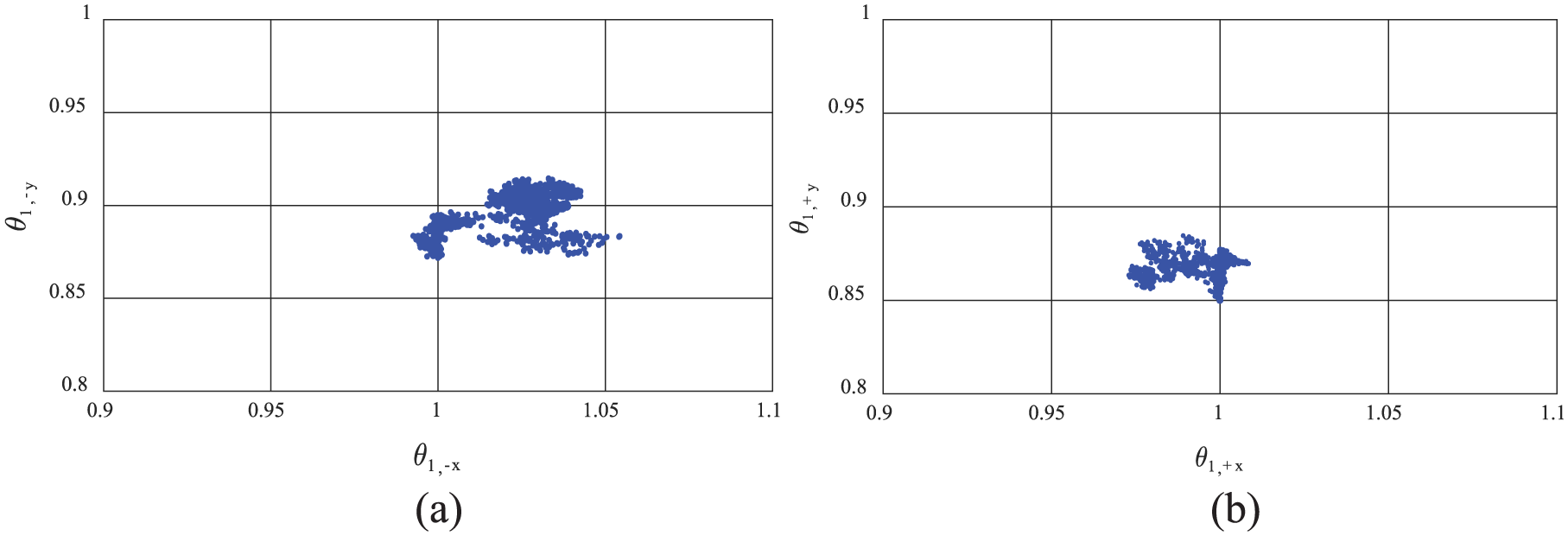
Post burn-in samples of some posterior stiffness parameters for the DP1B.ps scenario, plotted in (a)
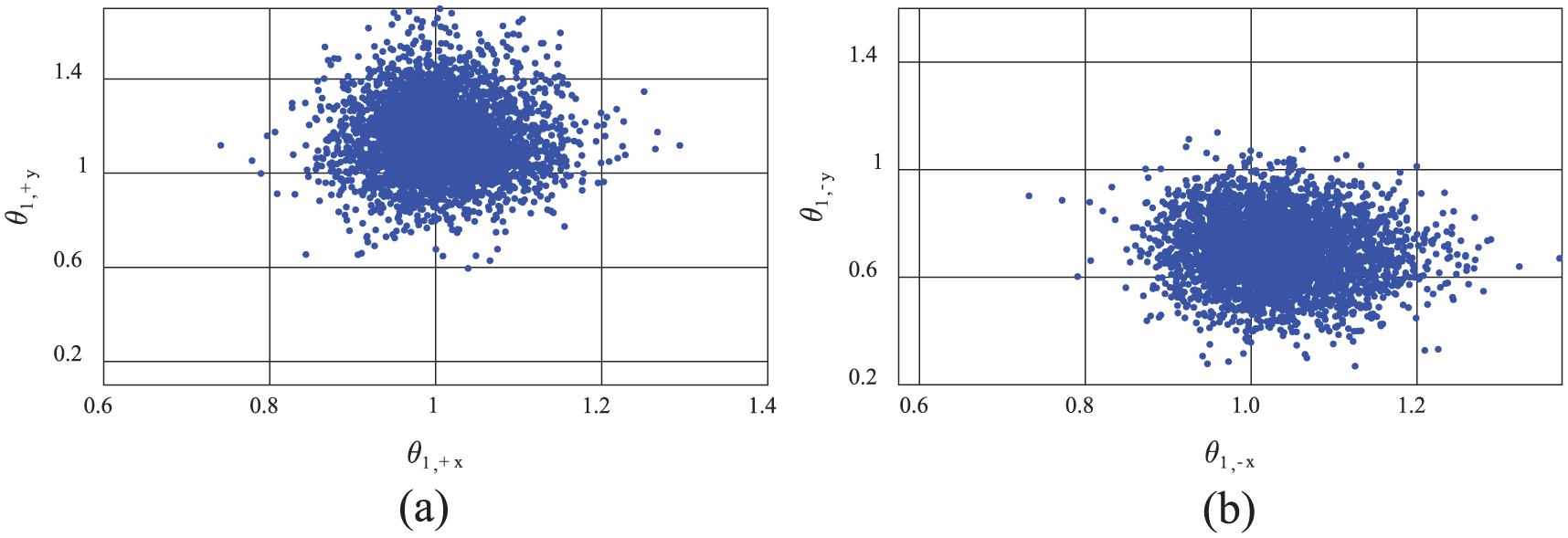
Post burn-in samples for some posterior stiffness parameters for Config. 5 scenario plotted in (a)
Figures 5 and 6 show the posterior probability densities of the damage extent fraction f for each substructure, which is the decrease in each stiffness parameter divided by its original calibration value. The posterior probability densities are estimated by the computed posterior PDFs (fast algorithms) or posterior samples (full GS algorithm). Damaged substructures should have large posterior probability density values where the stiffness reduction value is close to the real value. By comparing the results, it is seen that the fast SBL and GS algorithms give more accurate stiffness reduction ratios than the method without the sparseness constraint. Moreover, the false and missed damage indications have been effectively suppressed. This shows the benefit of exploiting damage sparseness. The performance of the two SBL algorithms is similar, although false damage detections (actual undamaged substructures that have probability densities shifted to larger damage extents) occur less often for the full GS SBL algorithm for Config. 5 (Figure 6). This is because of the robust treatment of the hyper-parameters by a fuller posterior uncertainty quantification. For example, the probability densities of
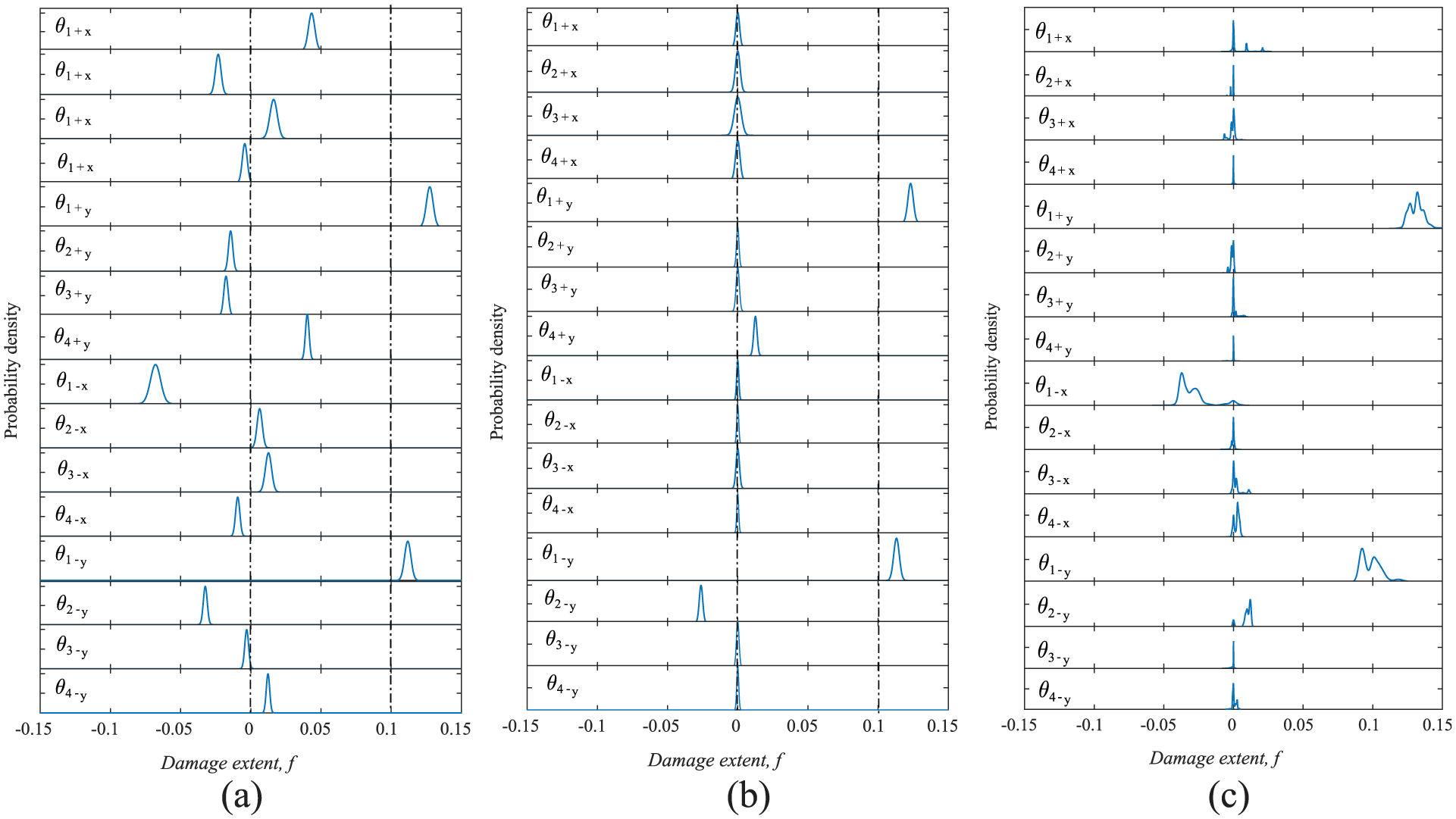
DP1B.ps scenario: (a) Approximated Gaussian PDFs for the fast SBL algorithm with sparseness turned off and (b) Approximated Gaussian PDFs for the fast SBL algorithm; (c) Kernel probability densities built from 6000 post burn-in stiffness parameter samples by running the full GS SBL algorithm. The two damaged substructures correspond to
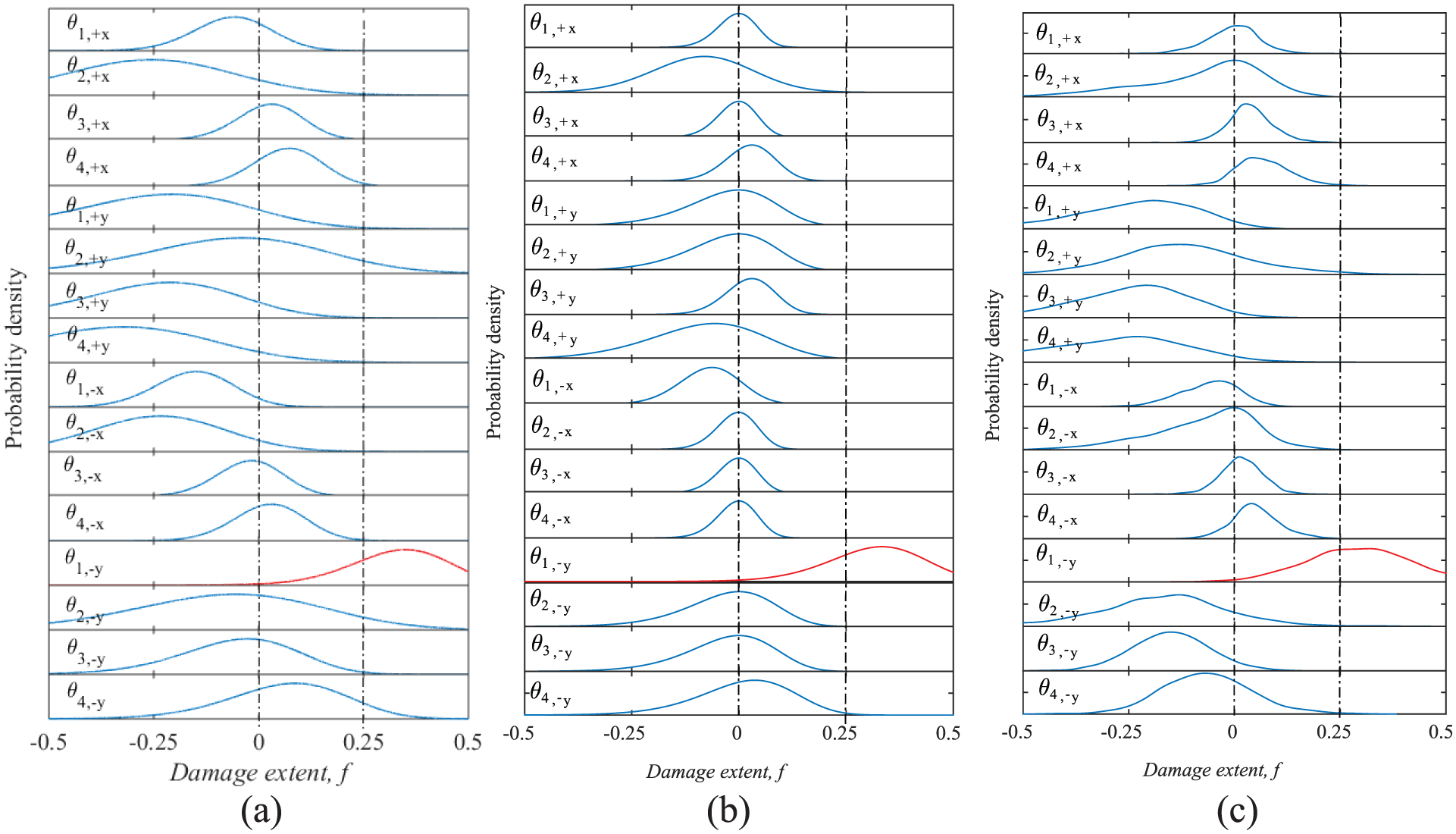
Config. 5 scenario: (a) Approximated Gaussian PDFs for the fast SBL algorithm with sparseness turned off and (b) Approximated Gaussian PDFs for the fast SBL algorithm; (c) Kernel probability densities built from 6000 post burn-in stiffness parameter samples by running the full GS SBL algorithm. The only damaged substructure corresponds to
Sparse Bayesian learning application in guided wave/ultrasonic NDT signal processing
In guided wave/ultrasonic NDT signal processing, the signal obtained from pulse-echo mode testing can be represented as a linear combination of echoes reflected from damage or defects in the sample being examined. A generalized expression of the signal is given by

where

where
SBL applications in ultrasonic NDT
In ultrasonic NDT, the received signals are often contaminated by noise from both the measurement system and test sample (structure noise, due to scattering of ultrasonic waves by the “grain” microstructure of the tested material). To suppress noise and to increase the visibility of echoes for detection, Zhang et al. (2008) proposed a methodology in which the SBL algorithm developed by Wipf and Rao (2004) was employed to decompose the noisy NDT signals. The dictionary

where s is the scale of the function, z is its translation, and v is the frequency modulation. One limitation of this SBL algorithm is that it is extremely computationally demanding, especially when the dimension of dictionary
SBL applications in guided wave damage/defect detection
In Guided Wave testing, the identification and recovery of each guided wave mode in the received signal is vital for damage or defect characterization and localization. Once individual modes are identified, defect localization is straightforward. Specially, if the amplitudes of each mode are specified, it is possible to further characterize the size of the defect.
To process narrowband guide wave signals in which signal dispersion is negligible, Wu et al. (2017b) introduced a SBL-based method, where the Gabor model given in equation (39) was utilized to approximate the GW pulses. To form an efficient over-complete dictionary, the three Gabor parameters
For dispersive guided wave signal processing, the Gabor dictionary becomes inefficient. Wu et al. (2018) also proposed a parameterized chirp model for the approximation of the dispersive guided wave signal using a polynomial approximation of the frequency–wavenumber dispersion
where
This method was verified through the experimental study in Figure 7, where a notch was prefabricated as damage. Figure 8 shows the recovered signals and individual modes obtained. Using the propagation information of the recovered modes and the triangulation method, the location of the damage was obtained, as presented in Figure 9. It is observed that the detected notch is close to its actual position (the distance between these two positions is approximately 17 mm). It is noteworthy that it is sufficient to localize the notch using the measurements from only two sensors.
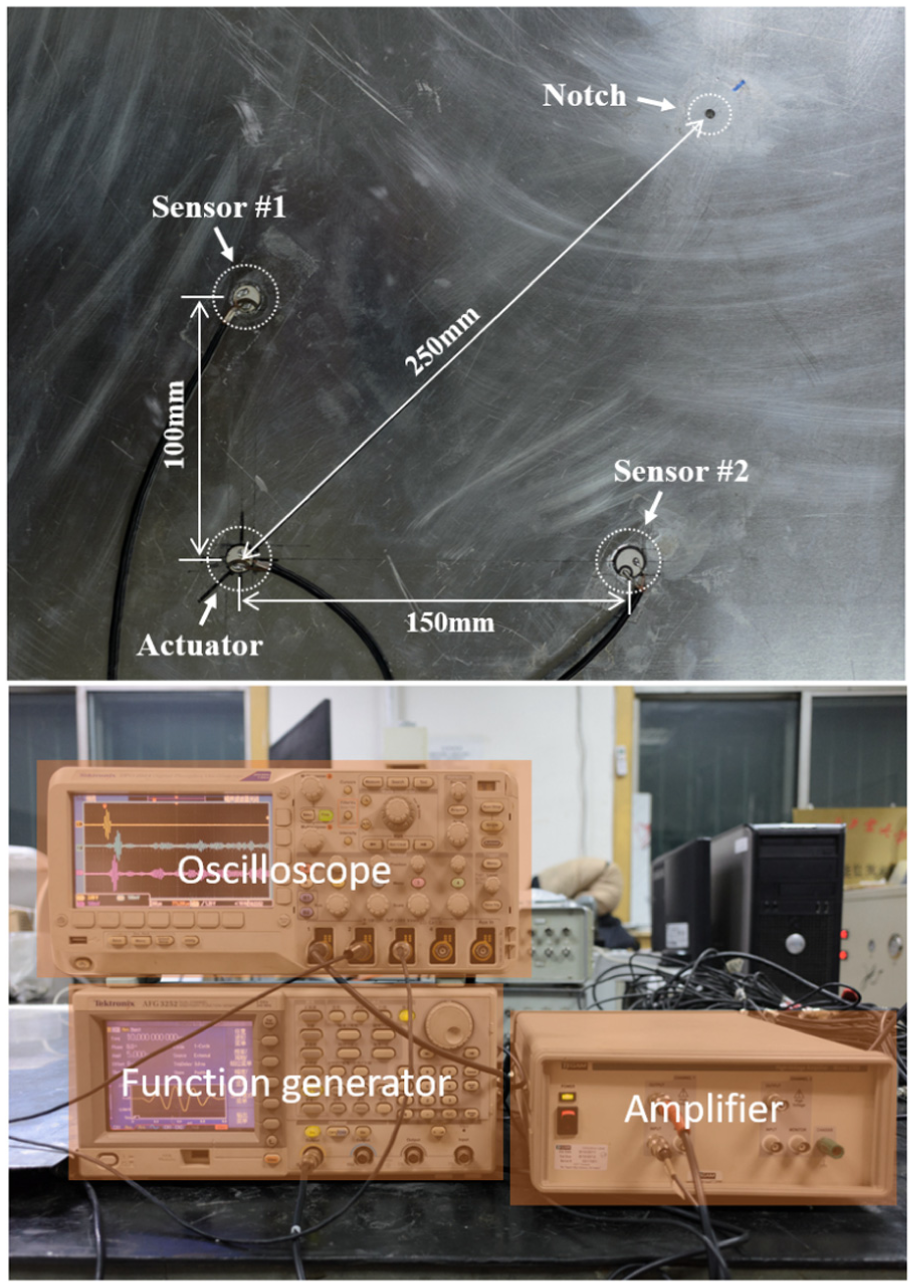
Experimental setup for damage localization.
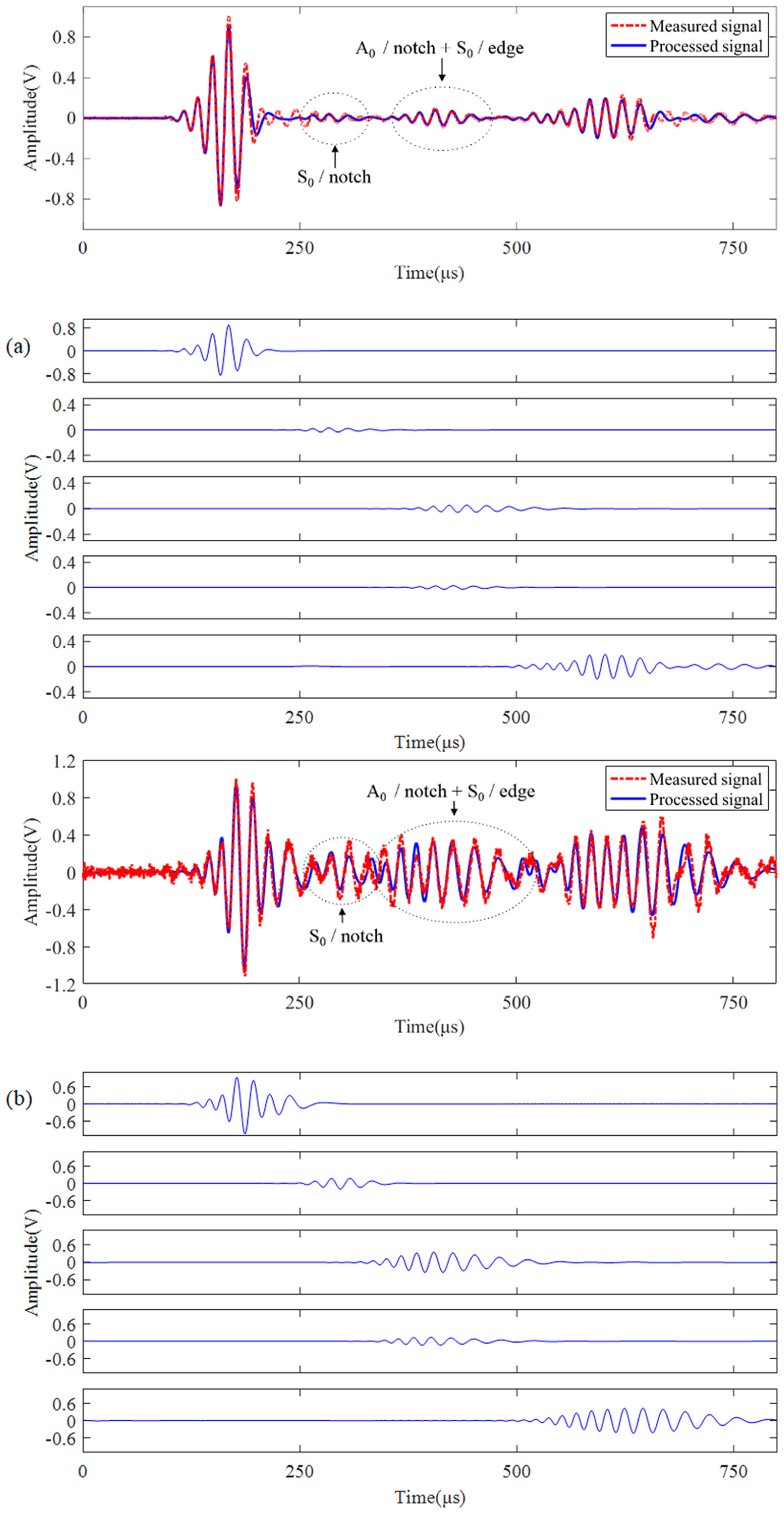
(a) Processed signal and recovered modes for sensor 1 and (b) processed signal and recovered modes for sensor 2.
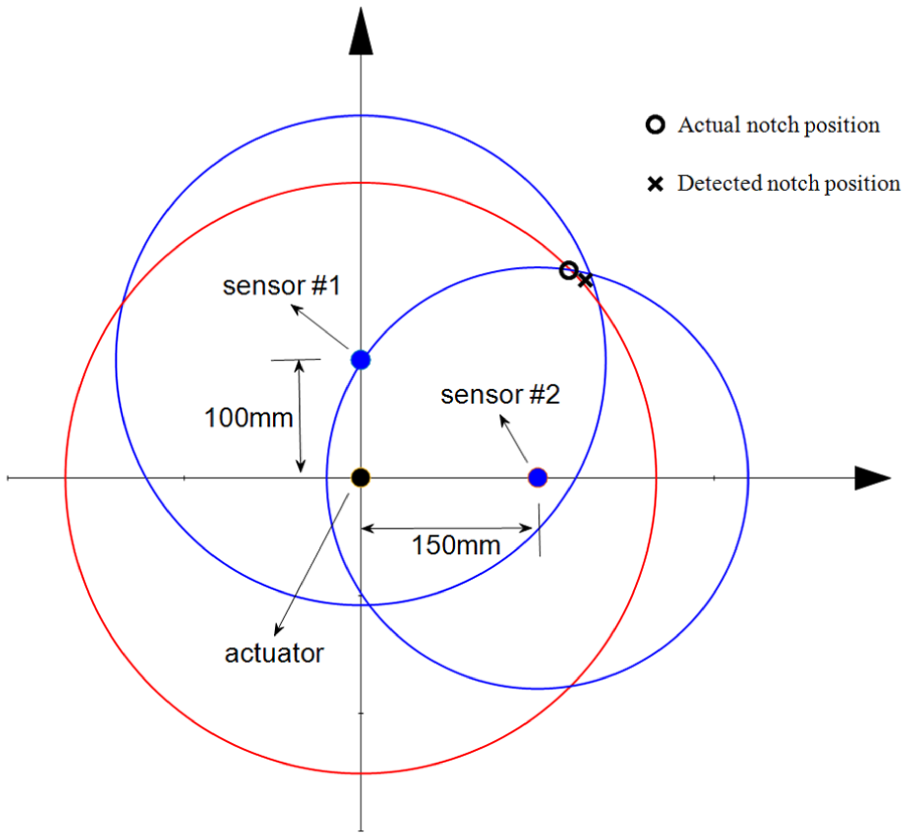
Notch localization.
Discussion and future prospects
This article presented a state-of-the-art review on Bayesian inference and its application in structural system identification and damage assessment of civil infrastructures. Because of limited page space allowed for this article, other applications of Bayesian inference in system identification, such as modal identification, are not included. Based on the literature review, the following concluding remarks can be made:
A powerful Bayesian probabilistic framework is available for treating modeling uncertainty in system identification that is based solely on the probability logic axioms. It allows plausible reasoning regarding system behavior based on noisy incomplete data without invoking the concept of “inherent randomness.” Rather than considering only a point estimate based on a single model, Bayes’ theorem is used to compute the posterior probability distribution and quantify the relative plausibility of each model in a parameterized set of system models.
Comparing the posterior probability at the model class level automatically implements a quantitative form of the Ockham Razor. Roughly speaking, this principle states that models should not be more complex than is sufficient to explain the data. The Bayesian Ockham Razor penalizes model classes that “overfit” the data, which is important in real applications since overly complex models often lead to overfitting of the data and then subsequent response predictions may be unreliable.
To allow a computationally feasible Bayesian implementation, various Bayesian approximation tools have been developed for robust analysis and characterization of the posterior distribution in Bayesian updating and model class assessment involving a large number of uncertain parameters. Their applications are based on different situations. For example, Laplace’s asymptotic approximation is useful if the amount of data is not too small, and the model class is globally identifiable. When the chosen class of models is unidentifiable or locally identifiable based on the data so that there are multiple maximum likelihood estimates (MLEs), stochastic simulation methods are more practical to calculate the model class evidence, such as MCMC methods.
The application of Bayesian inference for both vibration-based and wave propagation-based damage assessment is addressed and reviewed. Using a Bayesian probabilistic formulation, the updated posterior probability distribution of the uncertain damage-related model parameters is obtained. Not only the most probable estimates are inferred but also the associated posterior uncertainties are quantified, including the probability of substructure damage of various amounts. The concept of system mode shape was utilized in the vibration-based damage assessment methods. This avoids the challenging mode-matching problem and the necessity of solving the nonlinear inverse problem related to a structural model eigenvalue equation.
The hierarchical sparse Bayesian learning methodologies have attracted interest in recent years for performing sparse stiffness loss inference for vibration-based damage assessment and also for flaw detection using guided wave/ultrasonic NDT signal processing. It is found that the incorporation of prior information pertaining to the spatial sparseness of structural damage helps to suppress the possible occurrences of false damage detections. Moreover, the algorithms have the appealing feature that they automatically select all algorithmic parameters, so that no user intervention is required.
To enhance the application of Bayesian inference in civil engineering and other related areas in science and technology, the following suggestions for future research are suggested:
Most past Bayesian inference applications in system identification and damage assessment have involved low-dimensional model parameters. There are computational challenges to applying the Bayesian approach to high-dimensional inverse problems, such as how to efficiently sample the posterior high-dimensional parameter spaces and how to explore robustly the features implied by the collection of models corresponding to the posterior samples of the model parameters. Further research is desirable to develop new methods for exploring high-dimensional model parameter spaces, such as iterative block-parameter Gibbs sampling algorithms, and for refining model parameter spaces, such as variable-resolution approaches that permit a progressive refinement of model parameterization.
The assessment of the bottlenecks in Bayesian model updating and uncertainty quantification of nonlinear structural models requires further study. For complex nonlinear models, an analytical formula of the likelihood function might be difficult, or even elusive. Methods such as Approximate Bayesian Computation (ABC) methods have the potential of bypassing the evaluation of likelihood functions and should be further explored in applications.
Bayesian inference is a powerful statistical framework for dealing with big datasets to avoid data overfitting and to allow model uncertainty to be explicitly quantified. To overcome the computing challenges with large-scale spatial and temporal datasets in structural health monitoring, the advance of scalable Bayesian inference algorithms should be explored. Topics for research include subsampling big datasets with a stochastic method that exploits the redundancy in large-scale datasets, developing recursive Bayesian estimation for inferring an unknown PDF over time using sequential datasets, producing modular and portable software for distributed/parallel computing platforms.
Bayesian methods can enhance many machine learning methods (including deep learning) by handling missing data, extracting much more information from small datasets, and automatically tuning hyper-parameters. Moreover, Bayesian methods allow us to quantify both modeling and measurement uncertainty in learning and making predictions, which is a desirable feature in various fields. Future research in machine learning methodologies and applications can benefit by exploring Bayesian methods.
Footnotes
Appendix 1
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is financially supported by the National Key Research and Development Program of China (2017YFC1500605) and the National Natural Science Foundation of China (Grant Nos. 51778192, 51638 007 and 51308161).