
Abstract
The process of corrosion cracking in reinforced concrete is important for understanding the durability evolution behavior of reinforced concrete. However, most of the proposed models in the literature are based on differential equations, which are computationally expensive when solved using traditional numerical methods, and they do not provide uncertainty quantification of the predicted results. In this study, a physics-guided probabilistic deep learning framework integrating Bayesian inference and physics-informed neural network (PINN) is proposed for modeling corrosion-induced cracking in reinforced concrete. Unlike existing PINN-based approaches that yield only deterministic predictions, the proposed framework embeds the governing physical equations directly into the Bayesian neural network training process, simultaneously enforcing physical consistency and quantifying prediction uncertainty. The Mean Absolute Percentage Error (MAPE) for the corrosion expansion force and radial displacement of the steel-bar concrete contact surface were 0.58% and 4.6%, respectively, demonstrating high prediction accuracy. The quantified uncertainty bounds provide engineers with reliable confidence intervals for the predicted corrosion expansion force and radial displacement, supporting structural inspection decision-making and risk-based maintenance planning. Finally, the effects of various parameters on modeling performance and stability were systematically investigated, offering practical guidance for model configuration in similar physics-informed probabilistic learning tasks.
Introduction
Reinforced concrete has been widely used in civil and hydraulic engineering due to its excellent mechanical properties and durability (Guo, 2014; Reis et al., 2023; Wang et al., 2024). Reinforced concrete structures are susceptible to various forms of degradation, including corrosion-induced cracking and flexural damage at critical sections under repeated loading. Accordingly, recent studies have investigated both automated crack detection in concrete walls using transfer learning techniques (Philip et al., 2023) and damage mechanisms in steel-fiber-reinforced concrete slabs under repeated loading (Ananthi, 2022). Understanding the corrosion cracking process and developing reliable predictive models are therefore essential for structural inspection, life assessment, and maintenance decision-making.
Various theoretical models have been proposed to simulate the cracking process in corroded reinforced concrete (Chang et al., 2024; Liang and Wang, 2020; Lu et al., 2011; Wang et al., 2016; Zhang et al., 2017; Zhao et al., 2021). Su and Zhang (2015) developed an analytical model based on the double-cylinder mechanism, incorporating concrete confinement effects and volume expansion at the steel-corrosion-concrete interface. Chen and Xiao (2012) modelled the corroded cover as a thick-walled cylinder and proposed control equations for directly calculating crack width. Xiao et al. (2016) proposed an analytical solution for cohesive cracking under inhomogeneous corrosion, assuming a fan-shaped corrosion contour. Šavija et al. (2013) conducted a mechanical analysis to investigate the cracking mechanism due to reinforcement corrosion. Their approach accounted for concrete’s non-homogeneity using a two-dimensional point model. Wang et al. (2014) proposed a displacement and stress calculation model based on anisotropic damage theory. Despite these advances, most existing models rely on numerical methods to solve governing differential equations, which are computationally expensive and do not provide uncertainty quantification of the predicted results.
The rapid growth of data and advances in computing have made machine learning a powerful tool for structural analysis and prediction (Li et al., 2024; Miele et al., 2023; Qin and Kaewunruen, 2024). Among these methods, physics-informed neural network (PINN) has emerged as a promising approach for solving differential equations by embedding physical constraints directly into the learning process (Raissi et al., 2019; Raissi and Karniadakis, 2018). Lagaris et al. (1998) introduced the first method for solving initial and boundary value problems using artificial intelligence. Their approach demonstrated applicability across a wide range of equations, from single ordinary differential equations to complex systems of coupled and partial differential equations. This groundbreaking work laid the foundation for using neural networks in solving differential equations. Raissi and Karniadakis (2018) proposed a machine learning approach from small amount of data. Subsequently, they proposed Physics-informed Neural Networks (PINN) by embedding physical information into neural networks (Raissi et al., 2019). In recent years, applications of PINN have encompassed a wide range of subject areas including fluid dynamics, materials science, geoscience, climate modeling, biomedical engineering, and structural engineering (Chen et al., 2021; Gao et al., 2020; Jagtap et al., 2020; Meng et al., 2020; Nabian et al., 2021; Uddin et al., 2023; Wang et al., 2020). Rao et al. (2020) proposed a mixed-variable scheme of PINN for fluid dynamics and applied it to simulate steady-state and transient laminar flows at low Reynolds numbers. Zhang et al. (2024a) integrated PINN and symbolic regression to discover a reaction-diffusion type partial differential equation for tau protein misfolding and diffusion. In structural engineering, PINN techniques have been used to accelerate computational structural dynamics simulations, to optimize design parameters, and to model complex multiphysics phenomena with limited observational data. Scneidereit and Breuss (2022) proposed a solution method for solving rigid ordinary differential equations in damped systems using feed-forward neural networks. Zhang and Yuen (2022) proposed a physically bootstrap deep learning solver for solving the time-varying Fokker-Planck (FP) equations. They further proposed a neural network-based analytical solution of the FP equations and used their explicit models as test functions for the FP equations (Zhang et al., 2023a).
Bayesian inference such as Bayesian networks is widely used in reliability analysis of complex systems (Lee and Kwon, 2023; Liu et al., 2025; Yu et al., 2025). The properties of the Bayesian network modeling framework that make it particularly suitable for reliability applications are discussed (Langseth and Portinale, 2007). Meng et al. (2024) proposed a method that combines a physics-informed Bayesian network and a data-driven Bayesian network for lithium-ion battery risk analysis. Bayesian theory is also integrated with methods such as neural networks to achieve the quantification of uncertainty in neural network training results, and is widely used in structural engineering and risk assessment. Zhang et al. (2023b) proposed embedding Bayesian inference into a convolutional neural network for concrete surface damage classification. Zhang et al. (2024b) proposed a rail damage identification method by embedding Bayesian probabilistic layer into deep neural network. Basora et al. evaluated several uncertainty quantification methods in deep learning prediction including Bayesian Neural Networks (Basora et al., 2025). Pan et al. (2024) proposed a method for fusing Bayesian Neural Networks with stochastic processes to address the lack of uncertainty prediction. It also achieved reliable probabilistic remaining useful life prediction in the absence of lifetime labels. Recent advances have further demonstrated the effectiveness of Bayesian approaches in structural health monitoring, including data reconstruction using Bayesian multi-task learning (Wan and Ni, 2019) and unsupervised anomaly detection using probabilistic deep learning features (Wan et al., 2025). These studies demonstrate the effectiveness of Bayesian approaches in quantifying uncertainty in deep learning predictions.
Furthermore, existing PINN-based approaches for structural cracking do not account for uncertainties arising from incomplete knowledge of the system or from inherent variability in the material and loading conditions. This limitation represents a critical gap for engineering applications, where accurate and reliable predictions are essential. To address these limitations, this study proposes a physics-guided probabilistic deep learning framework that systematically integrates Bayesian inference with PINNs for corrosion-induced cracking modeling. Unlike existing PINN studies that yield only deterministic predictions, the proposed framework embeds the governing physical equations directly into the Bayesian neural network training process. This approach simultaneously reduces computational cost, enforces physical consistency, and provides rigorous quantification of uncertainties in the predicted corrosion expansion force and radial displacement. The remainder of this paper is organized as follows: Theory of cracking in corroded reinforced concrete presents the governing theory of corrosion cracking; Methodology details the proposed methodology; Modeling performance analysis of cracking in corroded reinforced concrete and Modeling stability analysis of cracking in corroded reinforced concrete evaluate modeling performance and stability; Conclusions concludes the paper.
Theory of cracking in corroded reinforced concrete
In this study, the theory of cracking in corroded reinforced concrete proposed by Wu (2013) was mainly adopted. In this theory, the concrete protective layer is simplified as a thick-walled concrete cylinder under the action of uniform corrosion of steel bar. The thick-walled cylinder idealization is widely adopted in analytical models of corrosion-induced cracking and has been validated against experimental data in numerous studies (Chang et al., 2024; Liang and Wang, 2020; Lu et al., 2011; Wang et al., 2016; Zhang et al., 2017; Zhao et al., 2021). This assumption is appropriate when the ratio of cover thickness to bar radius is not negligible, which is the case for typical reinforced concrete cover dimensions. However, it does not account for the influence of adjacent reinforcing bars, boundary effects near the concrete surface, or irregular cross-sectional geometries, which may introduce some deviation in practical applications. The assumption of uniform corrosion is a widely adopted simplification in analytical models of corrosion-induced cracking (Chang et al., 2024; Liang and Wang, 2020; Lu et al., 2011; Wang et al., 2016; Zhang et al., 2017; Zhao et al., 2021). Although non-uniform corrosion can occur in practice, the uniform corrosion assumption provides a tractable idealization that allows the corrosion expansion pressure and crack development to be described within a thick-walled cylinder framework. This simplification is particularly useful for structural assessment when detailed information on the actual corrosion morphology is unavailable. The corrosion expansion force is equated to a uniformly distributed radial internal pressure acting on the inner wall of the cylinder and inducing axisymmetric radial displacements. In the fully cracking stage, the concrete is all in the cracked zone. Since the cracks unfold in the radial direction, it is assumed that the modulus of elasticity of the concrete in the radial direction remains unchanged. The presence of cracks causes the modulus of elasticity in the circumferential direction to decrease (Zhao et al., 2016). In this study, the Mazars damage evolution theory (Mazars and Pijaudier, 1989) is used to describe the changes in the circumferential elastic modulus. In the Mazars damage model, two damage variables, D
t
and D
c
, are commonly used to describe tensile and compressive damage, respectively. Given that this paper investigates the process of corrosion cracking, the stresses on concrete are all tensile stresses, so this study only introduces the concept of the damage variable D
t
to consider the damage of concrete in the radial direction. The evolution equation of the damage variable is obtained by fitting the experimental data as shown in the following equation. It can reflect the damage behavior of the material in different stress states:


In this study, the concept of diffuse cracking is used in the modeling of concrete cracking (Long et al., 2008). The diffuse cracking concept treats the fracture process zone as a smeared band of microcracks rather than discrete cracks, which simplifies the mathematical treatment of crack width calculation. This assumption is reasonable for the fully cracked stage considered in this study, where multiple distributed cracks are present. However, it may lead to deviations in crack-width prediction in cases where localized macro-cracks dominate, and does not capture the discrete crack morphology observed in experimental specimens. The concept assumes that the fracture process area is a microfracture zone with a width of l. The microfractures are uniformly distributed along the width l of the fracture zone, and the conceptual diagram of diffuse fracture is shown in Figure 1. According to the concept of diffuse cracking, the circumferential strain at radius r (the total normal strain) is Diffuse crack modeling equivalent cracks.








The stress control equation boundary conditions are.
When r = R:

The governing equation for the radial displacement is (Li et al., 2006):

The final expression for the boundary conditions of the displacement control equation is obtained by substituting the geometric relations into (11):
Methodology
In this study, physics-guided probabilistic deep learning was proposed to complete the modeling of the cracking process of corroded reinforced concrete. Physics-guided probabilistic deep learning incorporates physical information, Bayesian theory and Deep Neural Networks. Thus, the following section is introduced from three parts: Deep Neural Networks (DNN), PINN, and physics-guided probabilistic deep learning.
DNN
DNN is a computational model consisting of multiple layers, including an input layer, several hidden layers, and an output layer. The tanh activation function is applied to introduce nonlinearity, with its output range of −1 to 1 keeping activations centered across layers, which contributes to the stability of the optimization process. The Mean Square Error (MSE) is used as the loss function (Li et al., 2024), optimized using the Adam algorithm (Kingma and Ba, 2015), which automatically adjusts the learning rate and performs well for sparse gradients.
Figure 2 illustrates the structure of the DNN, with input data denoted as (x
1
, x
2
, …, x
n
) and the output as the predicted value, z. The fully connected DNN architecture is suitable for this problem because the corrosion cracking equations are formulated as functions of a single spatial variable r, and the target stress and displacement fields vary smoothly within the computational domain. Therefore, a compact fully connected network with tanh activation functions can provide sufficient nonlinear approximation capability while remaining computationally efficient. Since the input is one-dimensional, convolutional or recurrent structures are not required. Construction diagram of DNN.
In this study, the specific network configurations are determined based on the stability analysis presented in Section 5. For the circumferential stress model, the network consists of 2 deterministic hidden layers and 1 probabilistic layer, with 50 neurons per hidden layer, trained for 20,000 epochs. For the radial displacement model, the network consists of 5 deterministic hidden layers with neurons configured as [10,50,100,20,20] and 1 probabilistic output layer, trained for 20,000 epochs. The tanh activation function is applied to all deterministic hidden layers in both models. The Adam optimizer is employed with a default learning rate of 0.001. Explicit regularization techniques such as dropout or L2 penalty are not applied. However, the KL divergence term in the variational inference objective implicitly regularizes the network weights by penalizing deviation from the prior distribution, as detailed in Section 3.3. All experiments were conducted on a laptop equipped with a 12th Gen Intel Core i5-1240P CPU, 16 logical processors, 1.70 GHz base frequency, and 16 GB RAM. No dedicated GPU was used, and all training was performed on the CPU. All network weights were initialized using the default Glorot uniform initializer (Xavier initialization), and biases were initialized to zero. The approximate training times were as follows: the PINN model for circumferential stress completed in less than 1 minute; the PINN model for radial displacement completed in approximately 20 minutes; and the physics-guided probabilistic deep learning models for circumferential stress and radial displacement each completed in approximately 30 minutes. The source code is available from the corresponding author upon reasonable request.
PINN
By directly embedding physical laws and constraints into the learning process, the PINN method can enhance the interpretability and generalization ability of the model, while reducing the need for large amounts of labeled training data (Bonfanti et al., 2023; Monaco and Apiletti, 2023; Zhang et al., 2024a). The construction diagram of PINN is shown in Figure 3. In this method, PINN is used to fit the solution z(x) at x, which is constrained by a physical model. The method learns the solution to the corroded reinforced concrete cracking equation in a self-supervised manner. Construction diagram of PINN.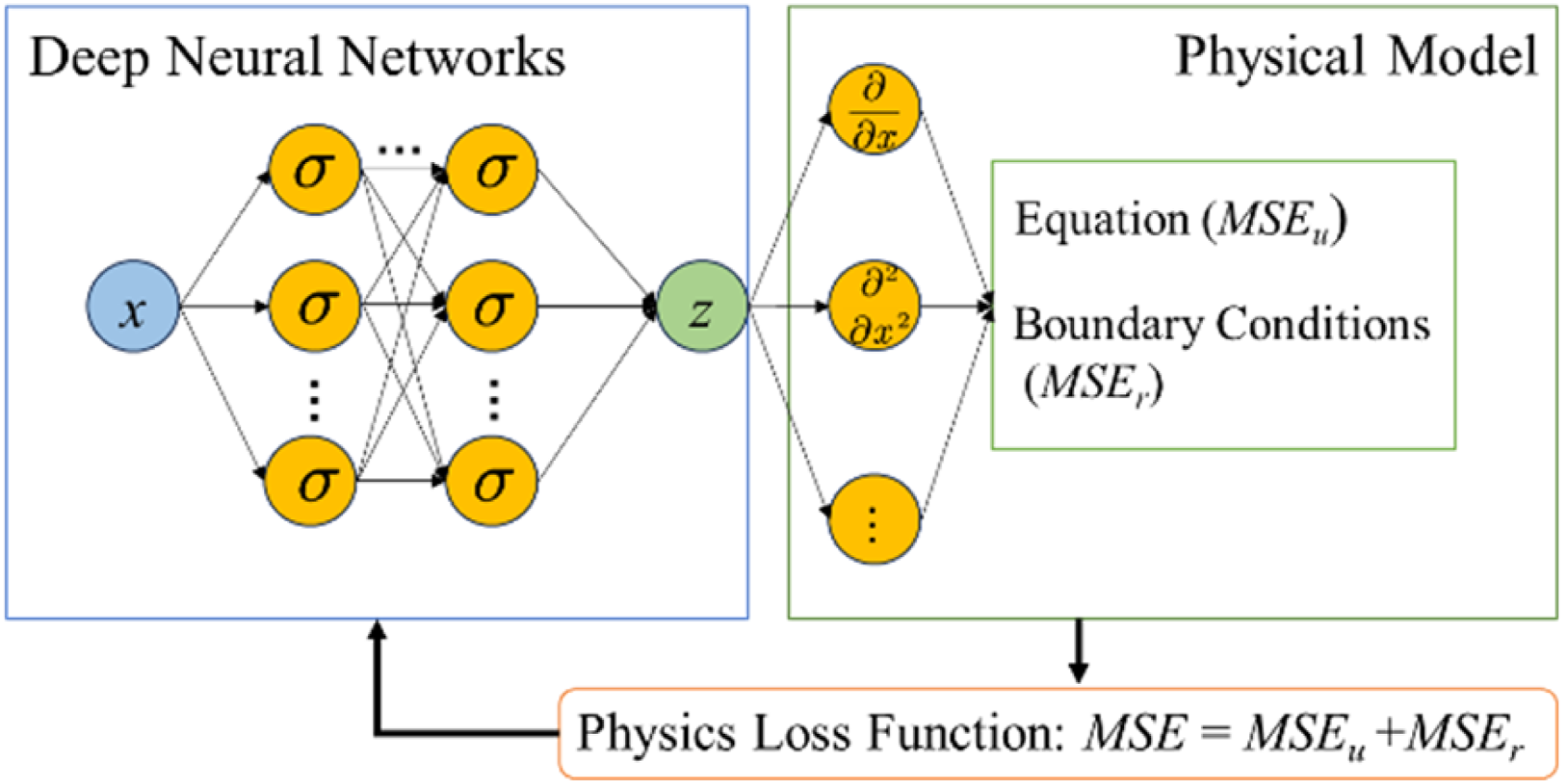
A series of data points (x) obtained by random sampling in the computational domain are used as inputs to the deep neural network. The number of neurons matches the feature dimensions of the data. However, in contrast to the supervised learning with true values in the previous section, PINN do not require true values as input. Thus, two physical constraints are added to the neural network to define the total loss function of the method in this paper as:

Specifically, for the circumferential stress problem,
To evaluate the methodology of this paper, MAPE were used as the test metric (Behera et al., 2024). It is defined as follows:

Physics-guided probabilistic deep learning
The key idea behind physics-guided probabilistic deep learning is straightforward: instead of learning a single fixed set of network weights as in deterministic DNN or PINN, the proposed framework treats the weights as probability distributions. This allows the model to express uncertainty in its predictions. Specifically, regions where the physical constraints are weaker or less directly imposed tend to produce wider uncertainty intervals. The mathematical formulation below describes how this is implemented through Bayesian inference and variational inference.
In deterministic deep learning, methods such as backpropagation and gradient descent are typically used to update the weights and biases of neural networks to minimize a loss function. These weights and biases are fixed point estimates that do not take uncertainty into account. Thus, deterministic deep learning often fails to understand and quantify their own uncertainties in the solution process. However, in Bayesian Neural Networks (BNN), weights and biases are considered as random variables that obey some probability distribution (e.g., Gaussian distribution). This probability distribution reflects the uncertainty of these parameters. During training, the parameters of these probability distributions (mean and variance) are updated instead of the weights and biases themselves being directly updated (Zhang et al., 2024b). It is equivalent to ensemble an infinite number of neural networks on a certain weight distribution for prediction (Blundell et al., 2015). In order to quantitatively analyze the uncertainty of the output results, Bayesian theory and physical information neural network are combined in this paper to model the cracking process of corroded reinforced concrete.
The computational process of physics-guided probabilistic deep learning includes prior distribution selection, parameter posterior distribution calculation and prediction uncertainty estimation.
For parameter posterior distribution calculation, according to Bayesian theory, the posterior distribution of weights in physics-guided probabilistic neural networks is generally defined as:

This posterior distribution is the value to be inferred, but this is difficult for the vast majority of neural networks. Methods for the computation of posterior distributions include Markov Chain Monte Carlo (MCMC) methods, importance sampling, and approximate Bayesian computation methods (Gelman et al., 2013). Among them, Variational Inference (VI) is one of the most effective and more efficient methods to compute the posterior distribution, which approximates the true posterior distribution by approximating a set of parameters of the posterior distribution (Gelman et al., 2013). In the VI method, we approximate the posterior density Architecture of physics-guided probabilistic deep learning.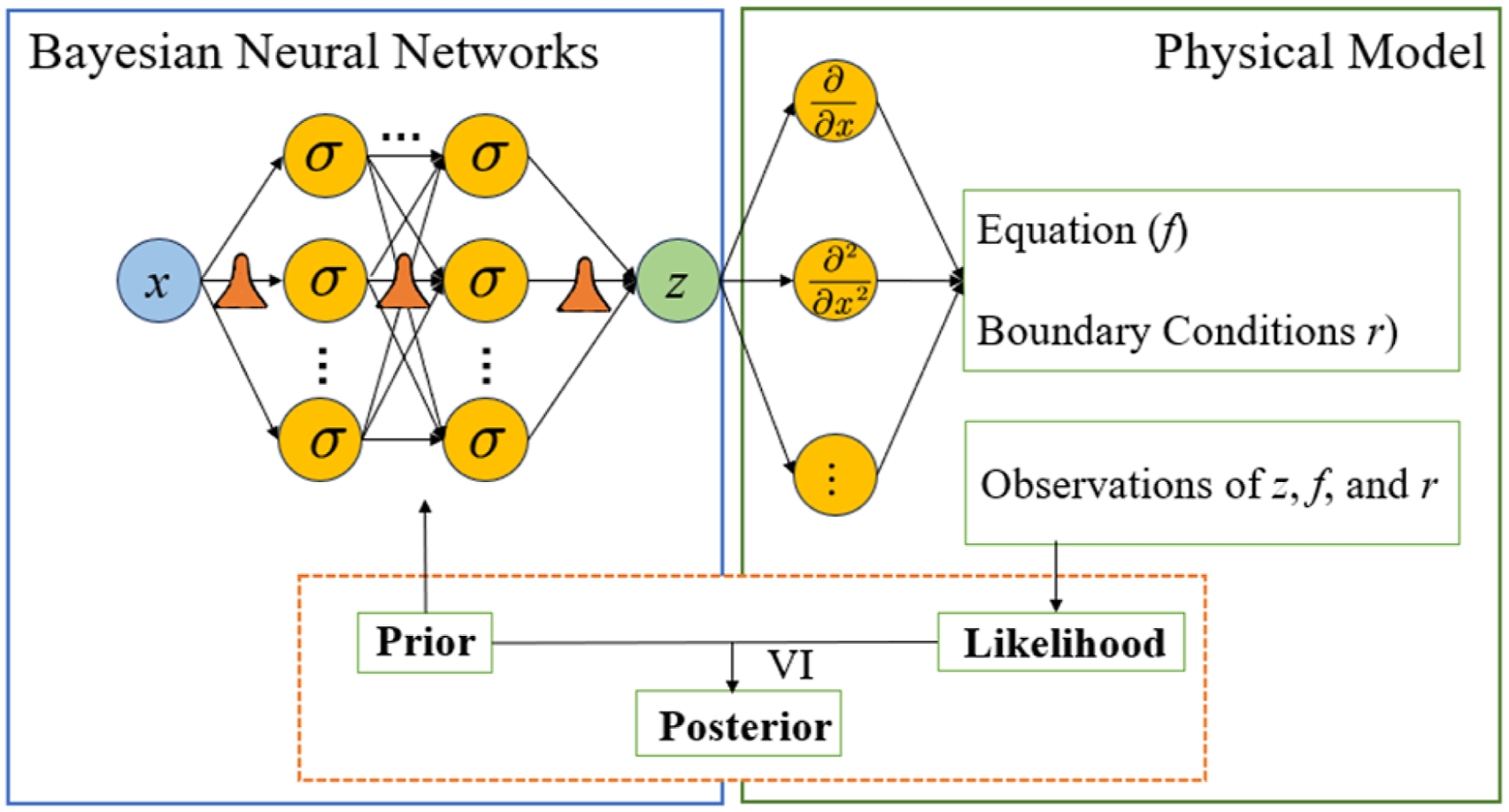

In the standard training process of deep learning, backpropagation algorithms are usually utilized to compute the gradient and update the network parameters to minimize the loss function. When it comes to weights sampled from the posterior distribution, it becomes difficult to directly perform differentiation operations on these samples because the sampling process itself is usually not differentiable. This means that one cannot simply apply the standard backpropagation algorithm directly to randomly chosen weight samples to compute the gradient. To overcome this difficulty, reparameterization techniques (Kingma and Welling, 2013) and Flipout methods (Wen et al., 2018) can be applied. Reparameterization techniques convert the process of sampling random variables into a sampling problem with derivable parameters. Specifically, the random weights are represented as a combination of a deterministic function and a random variable with a fixed distribution (e.g., standard normal distribution). For example, z, which was originally sampled from N (x, ϕ 2 ), can be converted to sampling ε from the standard normal distribution N (0, 1) and then obtaining z by means of z = x + ε ⋅ ϕ. In this way, the sampling process is converted to the sampling of x and ϕ, which are derivable parameters, and thus they can be updated using a gradient descent algorithm. The Flipout method is an efficient weight transformation technique that enables near-independent weight transformations in small batches. Specifically, Flipout introduces randomness by “flipping” each weight randomly without adding additional computational burden. This “flipping” process can be accomplished by sampling the weights and adding them to the network, thus making better use of stochasticity in the computation of the gradient and improving the efficiency of the gradient estimation. In the section on modeling stability analysis of cracking in corroded reinforced concrete, a comparative analysis of the effects of the two methods in this study is presented.
In this framework, uncertainty in the model predictions stems from the probabilistic treatment of the network weights. Rather than assigning fixed values to the weights, the proposed framework models them as probability distributions, whose parameters are optimized through VI as described above. Once the posterior distribution of the network weights is approximated, uncertainty is propagated to the model predictions via Monte Carlo sampling. Specifically, the network weights are sampled repeatedly from the approximated posterior distribution, and a forward pass is performed for each sample. In this study, 1000 forward passes are conducted for each input point, yielding an ensemble of predictions from which the mean and standard deviation are computed. The mean serves as the point estimate of the predicted quantity, while the standard deviation characterizes the prediction uncertainty. The 95% predictive uncertainty interval is approximated as the mean ±1.96 standard deviations, assuming an approximately normal predictive distribution. The validity of the uncertainty estimates is assessed in the section on modeling performance analysis of cracking in corroded reinforced concrete by examining whether the theoretical values fall within the predicted confidence intervals across the computational domain. This provides a practical assessment of whether the predicted uncertainty bounds are consistent with the reference theoretical solutions.
Compared to deterministic PINN, the proposed framework offers two additional capabilities. First, it provides quantified prediction uncertainty, enabling engineers to assess the reliability of the predicted corrosion expansion force and radial displacement rather than relying solely on point estimates. Second, the Bayesian framework incorporates prior knowledge through the prior distribution, which acts as a regularizer and helps stabilize training when the number of collocation points is limited.
Modeling performance analysis of cracking in corroded reinforced concrete
In order to mention the feasibility and performance of the method, a practical arithmetic example was used for validation (Zhao et al., 2011). The calculation parameters were: the diameter of the steel-bar d = 20 mm; tensile strength of concrete f
t
= 2.2 MPa; thickness of the protective layer C = 35 mm; modulus of elasticity E
c
=
The theoretical model adopted in this study is directly derived from the analytical framework proposed by Zhao et al. (2011) and Wu (2013), which integrates damage mechanics and the Mazars damage model to describe the corrosion-induced cracking process. The model was verified against experimental measurements of steel-bar radial loss at concrete surface cracking from multiple independent experimental programs, demonstrating reasonable agreement with test data. The analytical solutions generated by this verified framework serve as the reference values for evaluating the performance of the proposed physics-guided probabilistic deep learning approach in the present study.
PINN-based modeling performance analysis
By assuming different values for the surface crack width, the variation curve of circumferential stress with the inner radius of the steel bar was obtained, as shown in Figure 5. All the theoretical values mentioned in this study refer to the values obtained by analytical solution methods. In this section, PINN was used to complete the modeling of the cracking process of corroded reinforced concrete. Fitting effects of PINN (circumferential stress). (a) W = 0.06 mm; (b) W = 0.1 mm; (c) W = 0.2 mm; (d) W = 0.3 mm; (e) W = 0.4 mm; (f) W = 0.5 mm.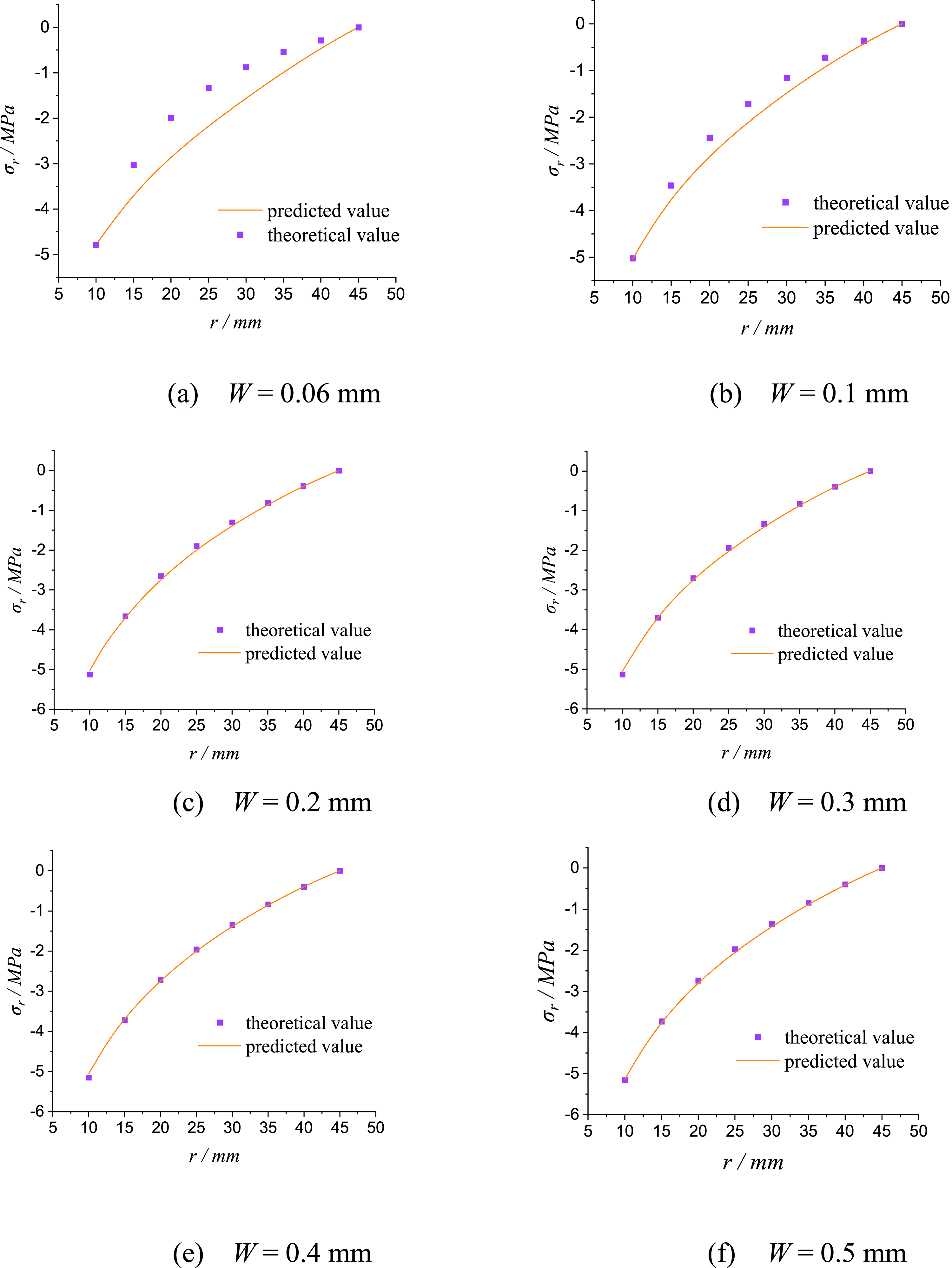
The important hyperparameters in PINN are listed below: the number of hidden layers setting as 2; the number of hidden layer neurons setting as 50; the number of training samples as 20; the number of epochs setting as 2000. The circumferential stresses increased with the inner radius, but the rate of increase slowed down with growth. The fit to the boundary values was accurate regardless of the change in W (crack width on the surface of the concrete protection layer), while the intermediate fitting values were a little off at the small values of W. This was because the control conditions were at the boundary points.
By assuming different values for the surface crack width, the variation curve of displacement with the inner radius of the steel bar was obtained, as shown in Figure 6. The important hyperparameters in PINN are listed below: the hidden layer of the neural network as 6 layers; the number of neurons in the hidden layer as 10,50,100,20,20,1; the number of training samples as 50; the number of epochs as 20,000. The fitted values of the displacements at r = 45 are very accurate at different surface crack widths, however, the fitted values at r = 10 are somewhat deviated. This is because the points controlled by the control equations in this study are all at r = 45. This phenomenon also reveals the sensitivity of the model fit at different locations. Since the PINN model relies on the control equations to guide the training of the solution, the region covered by the control equations directly affects the model fitting. To address this issue, future research could consider adding more control points, especially in the low-radius region, to improve the model’s performance throughout the computational domain. Fitting effects of PINN test set (radial displacement). (a) W = 0.06 mm; (b) W = 0.10 mm; (c) W = 0.20 mm; (d) W = 0.30 mm; (e) W = 0.40 mm; (f) W = 0.50 mm.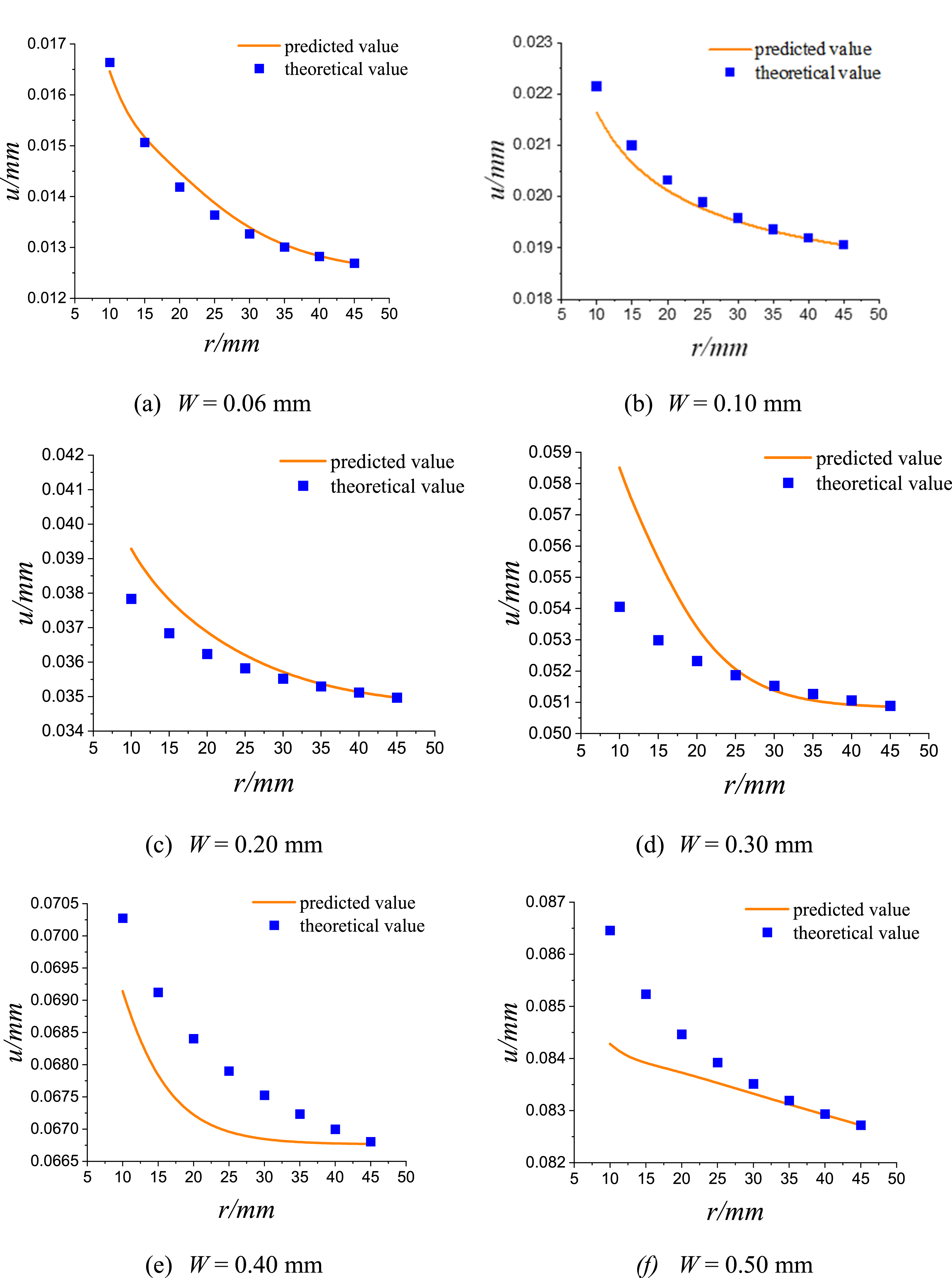
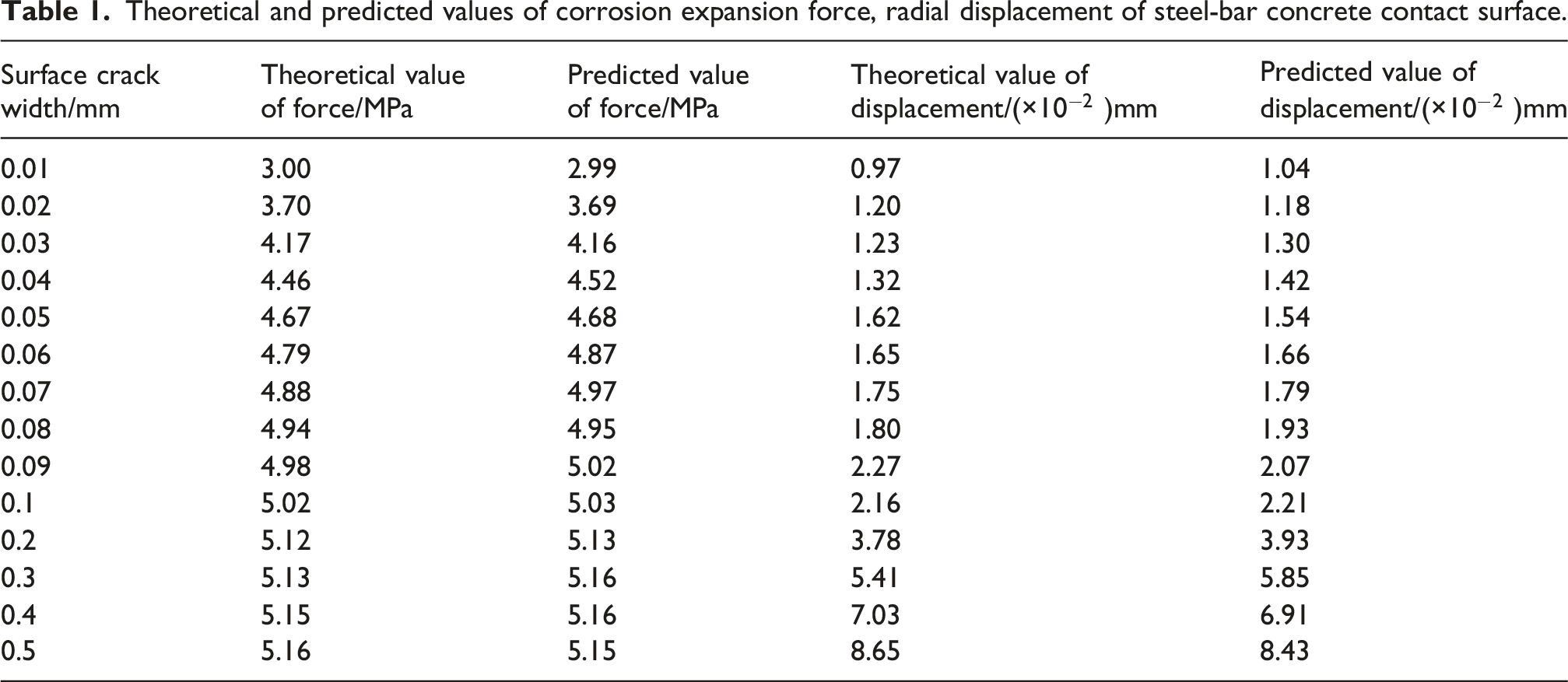
Theoretical and predicted values of corrosion expansion force, radial displacement of steel-bar concrete contact surface.
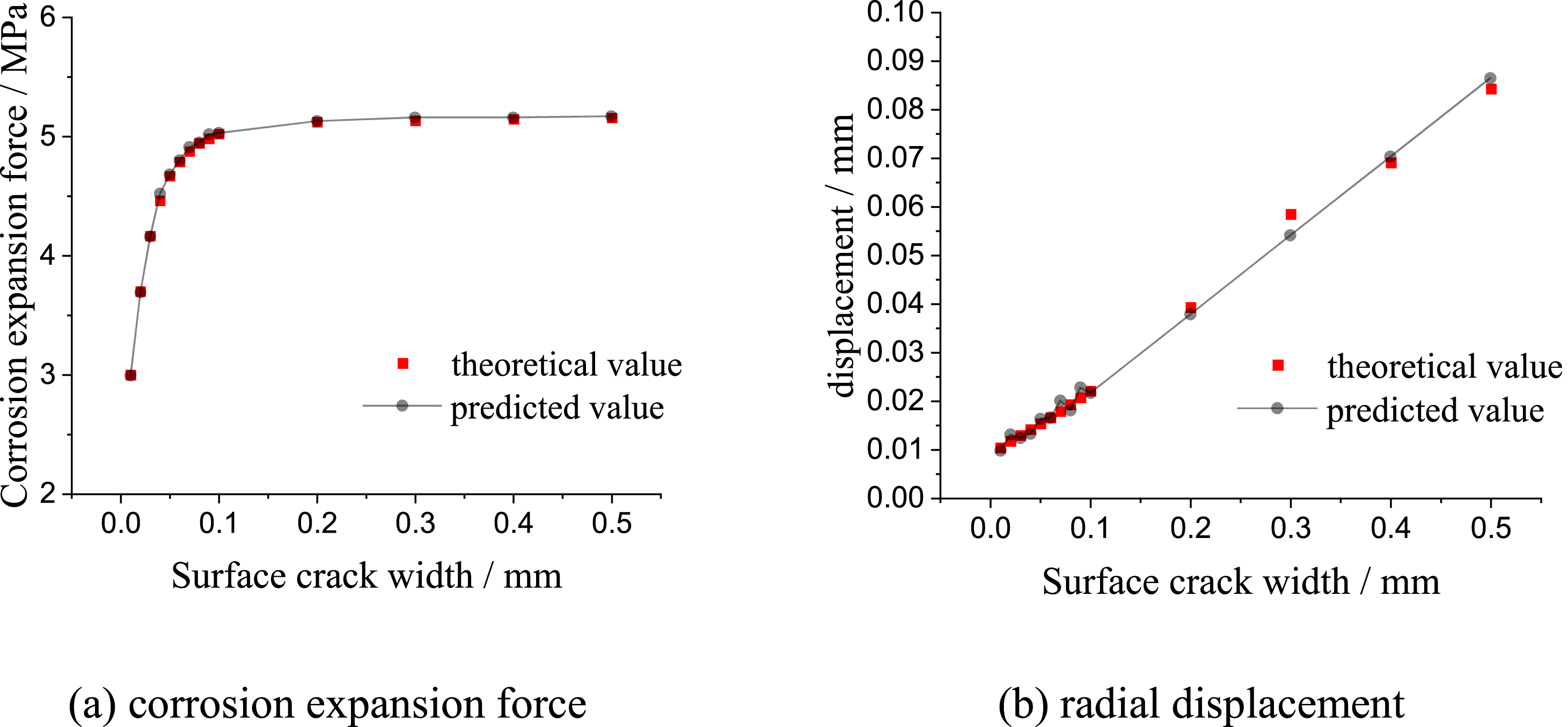
Comparison of theoretical and predicted values of PINN. (a) Corrosion expansion force; (b) Radial displacement.
Physics-guided probabilistic deep learning-based modeling performance analysis
In this subsection, the physics-guided probabilistic deep learning was used to analyze the uncertainty of the output results quantitatively. The curve of the process of circumferential stress variation with the inner radius of the steel-bar and the uncertainty of the prediction is shown in Figure 8 below. The closer the point was to the control point (r = 45) the lower the uncertainty was, for the reason that control equations controlled the point at the value at r = 45. The boundary loss term Fitting effects of physics-guided probabilistic deep learning (circumferential stress). (a) W = 0.06 mm; (b) W = 0.1 mm; (c) W = 0.2 mm; (d) W = 0.3 mm; (e) W = 0.4 mm; (f) W = 0.5 mm.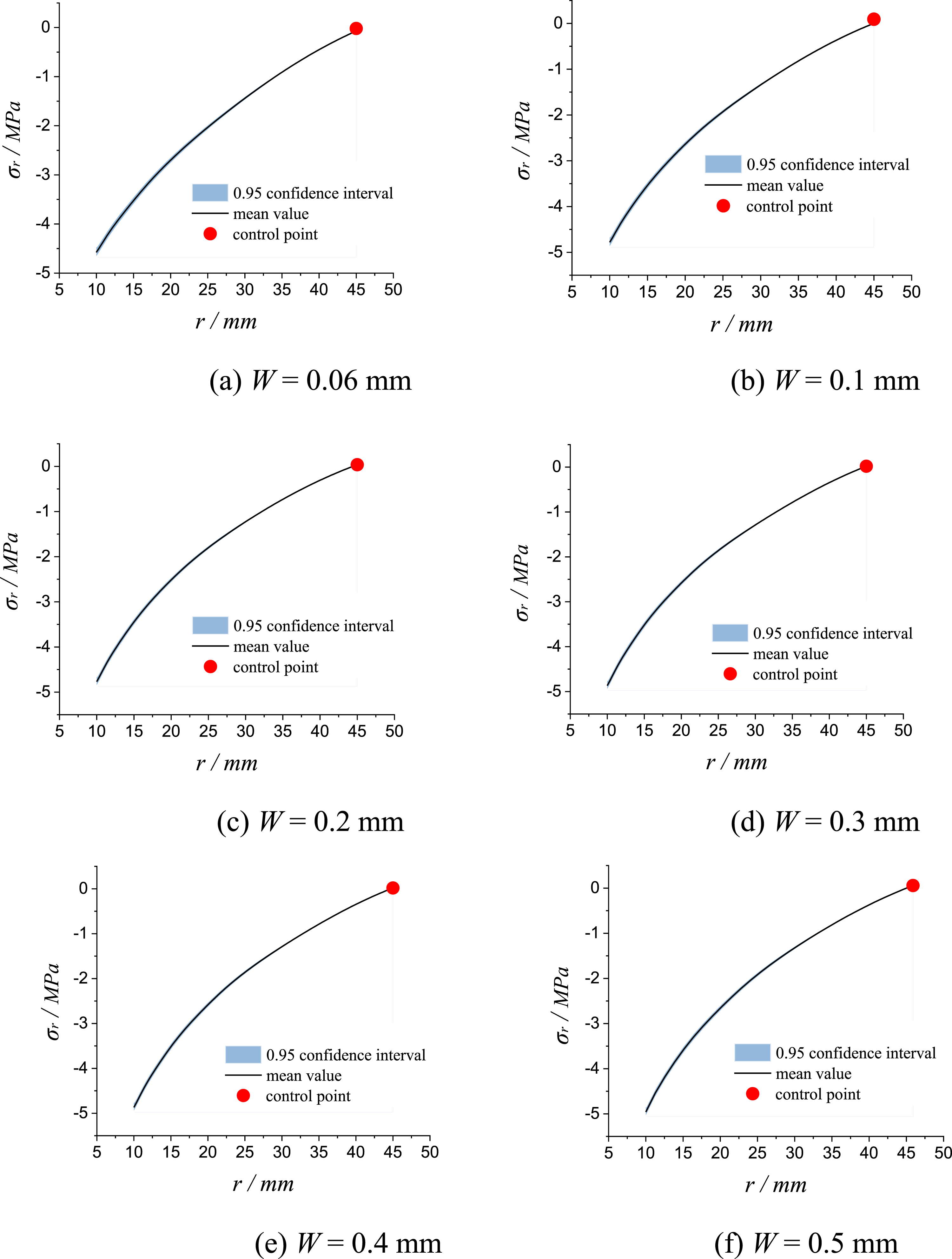
The important hyperparameters for predicting the radial displacement in physics-guided probabilistic deep learning are listed below: the hidden layer of the neural network as 6; the number of neurons in the hidden layer as 10,50,100,20,20,1; the number of probabilistic layers as 1; the number of training samples as 50; the number of epochs as 20,000; the gradient descent algorithm as the reparameterization algorithm. The curve of the process of radial displacement variation with the inner radius of the steel-bar and the uncertainty of the prediction is shown in Figure 9 below. With this approach, not only the predicted values of the output results are obtained, but also the uncertainty of these predicted values is quantified, thus providing more reliable information for practical applications. However, the fitting of the model performed better in the vicinity of the control points, while the fitting decreased in the region away from the control points. To improve this, increasing the number of control points or adding more boundary constraints should be considered in the future research. A similar pattern is observed for the radial displacement predictions, where uncertainty also decreases near the boundary point r = R + C, for the same reason as described above. Fitting effects of physics-guided probabilistic deep learning (radial displacement). (a) W = 0.06 mm; (b) W = 0.1 mm; (c) W = 0.2 mm; (d) W = 0.3 mm; (e) W = 0.4 mm; (f) W = 0.5 mm.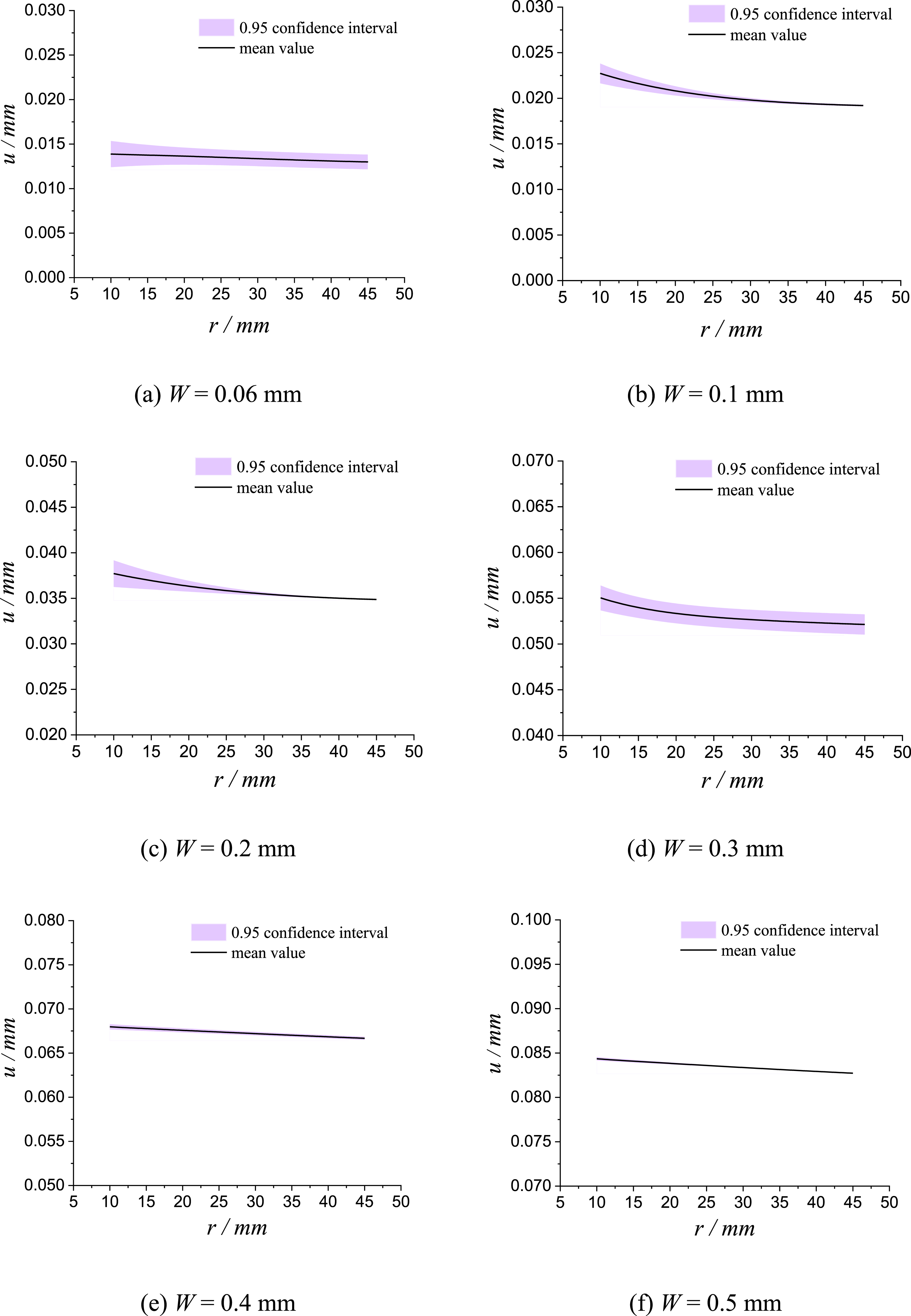
In this study, the corrosion expansion force and radial displacement at the steel-bar concrete contact surface, as predicted by physics-guided probabilistic deep learning, were evaluated. The predicted values were then compared with the theoretical values, as shown in Figure 10. The physics-guided probabilistic deep learning predicted the approximate range of the corrosion expansion force and radial displacement. It can be seen that the theoretical values are almost within the predicted range. It was superior to PINN in performance and generalization. The uncertainty quantified in this framework is primarily epistemic in nature, arising from finite collocation points, limited boundary constraints, and uncertainty in the learned network parameters. Aleatory uncertainty associated with intrinsic material variability, corrosion randomness, or measurement noise is not explicitly modeled in the current framework. The improvement of physics-guided probabilistic deep learning over deterministic PINN is not limited to the provision of uncertainty intervals. While PINN produces a single point estimate for each predicted quantity, the proposed framework provides a full predictive distribution, which enables a more informative assessment of model reliability. In particular, the narrower uncertainty intervals observed near the boundary point r = R + C reflect the stronger constraint imposed by the boundary loss term, whereas the wider intervals in the interior of the domain indicate regions where the model relies more heavily on the governing equations rather than direct boundary anchoring. This spatially varying uncertainty pattern provides engineers with location-specific confidence information that is not available from deterministic PINN predictions. Comparison of theoretical and predicted values of physics-guided probabilistic deep learning. (a) Corrosion expansion force; (b) Radial displacement.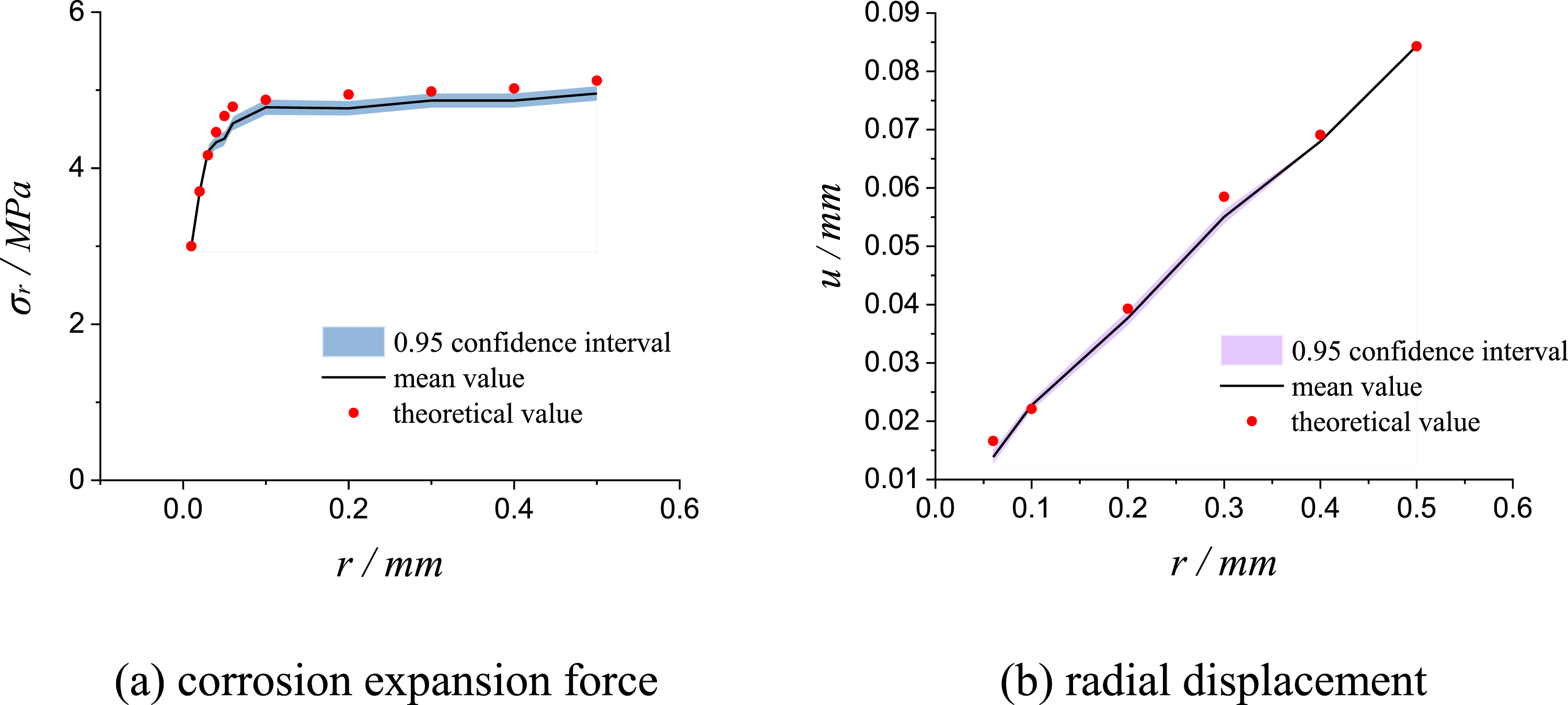
Modeling stability analysis of cracking in corroded reinforced concrete
PINN-based modeling stability analysis
Stability analysis of circumferential stress fitting
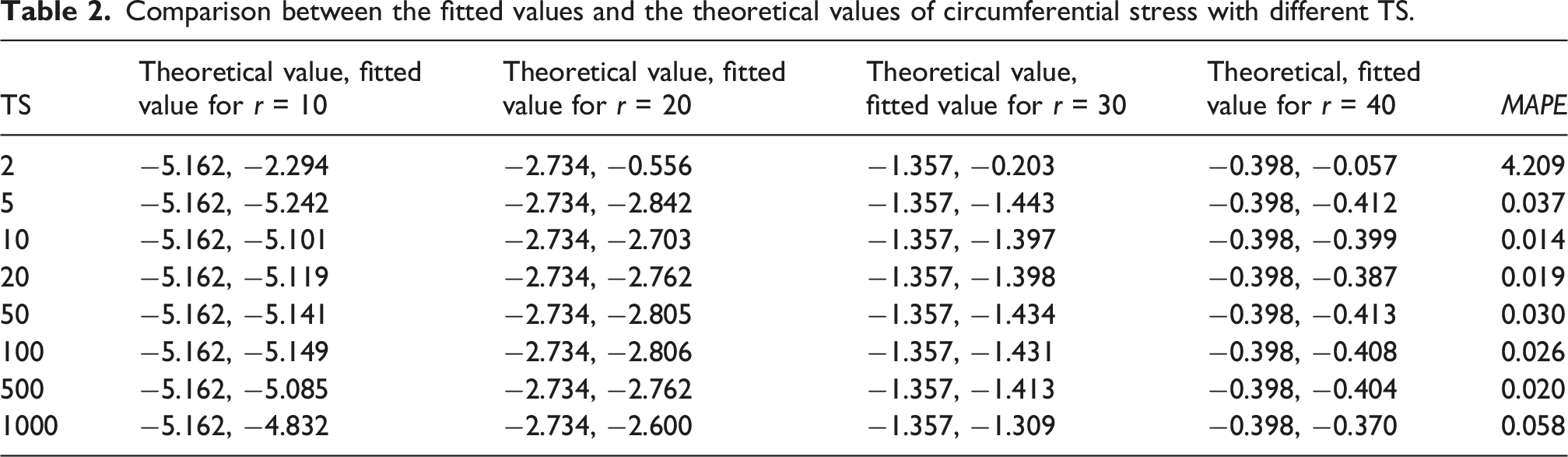
Comparison between the fitted values and the theoretical values of circumferential stress with different TS.

Comparison of the effects of different factors on the performance of neural networks (stress). (a) TS; (b) NH; (c) HL.
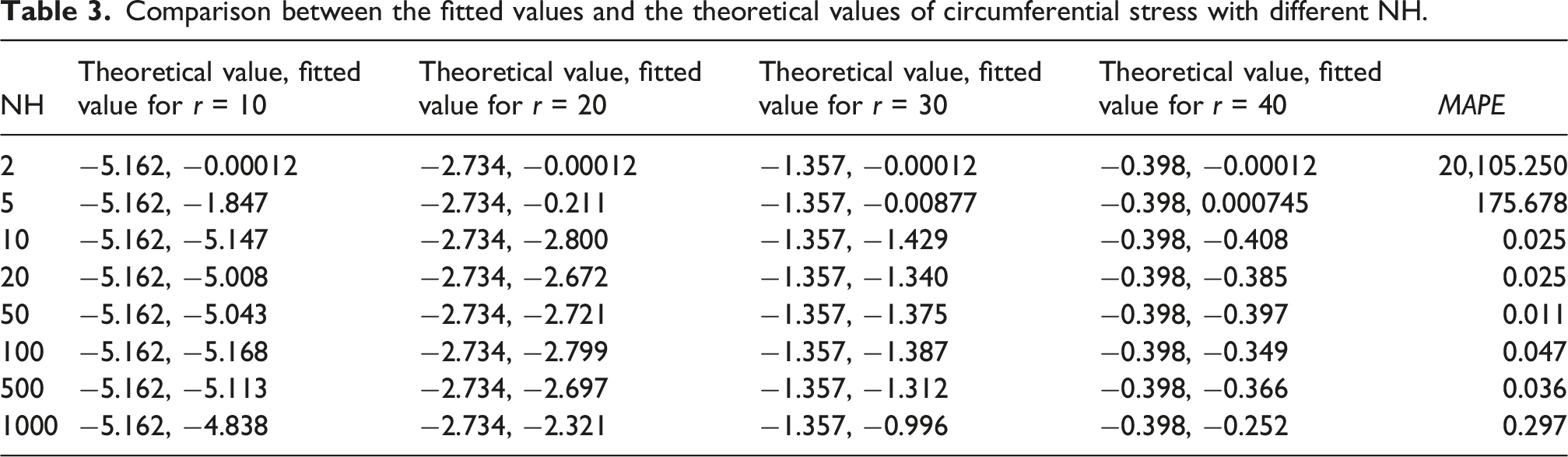
Comparison between the fitted values and the theoretical values of circumferential stress with different NH.
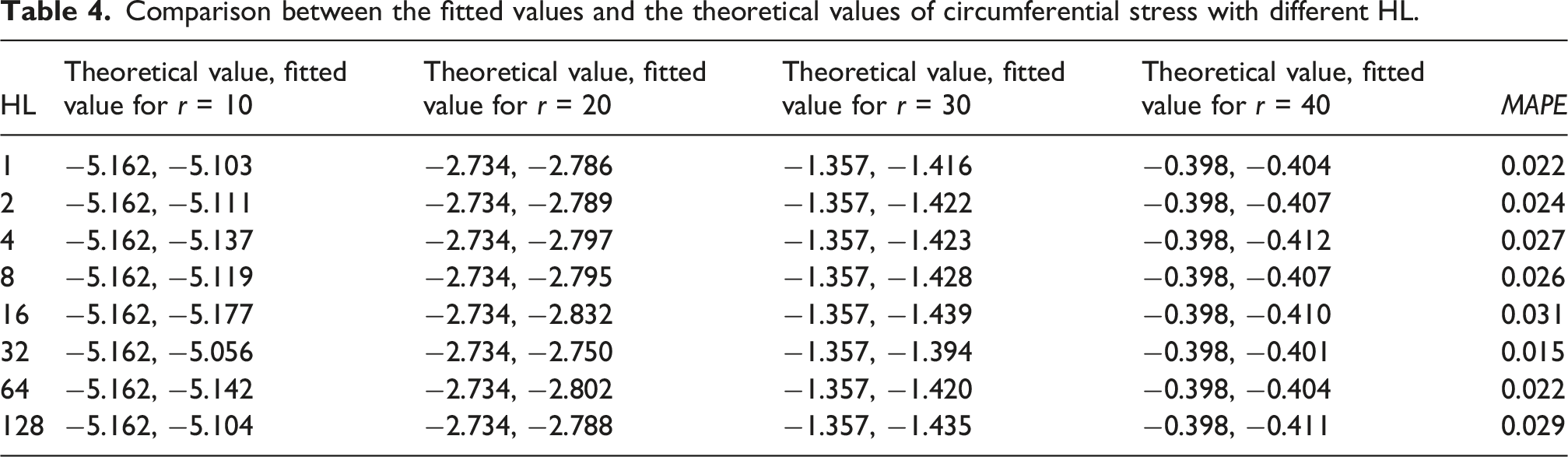
Comparison between the fitted values and the theoretical values of circumferential stress with different HL.
Stability analysis of radial displacement fitting
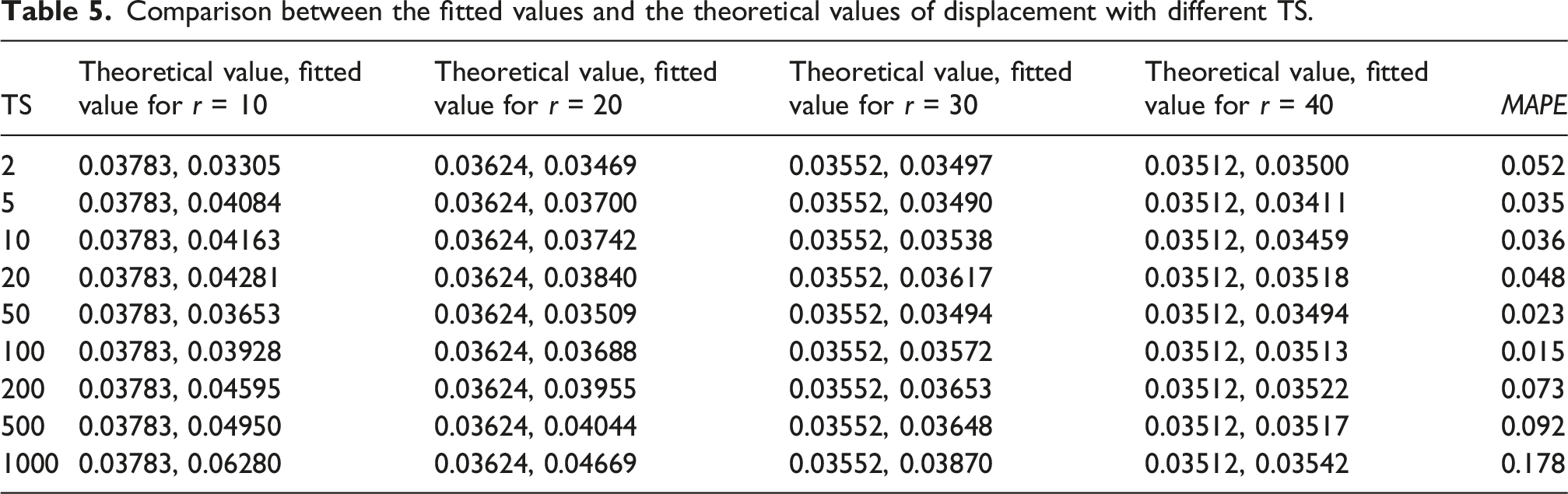
Comparison between the fitted values and the theoretical values of displacement with different TS.
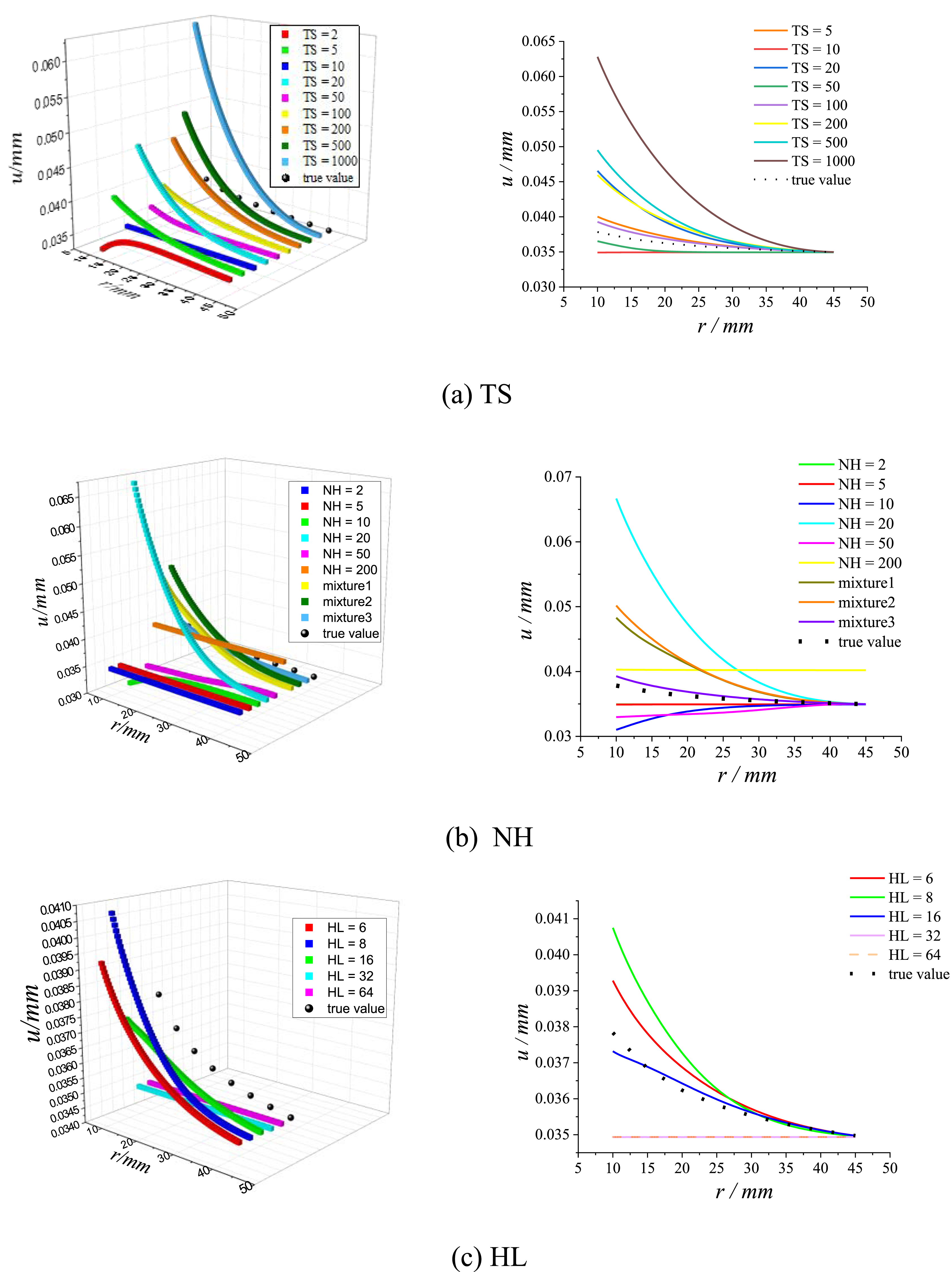
Comparison of the effects of different factors on the performance of neural networks (radial displacement). (a) TS; (b) NH; (c) HL.
Comparison between the fitted values and the theoretical values of displacement with different NH.
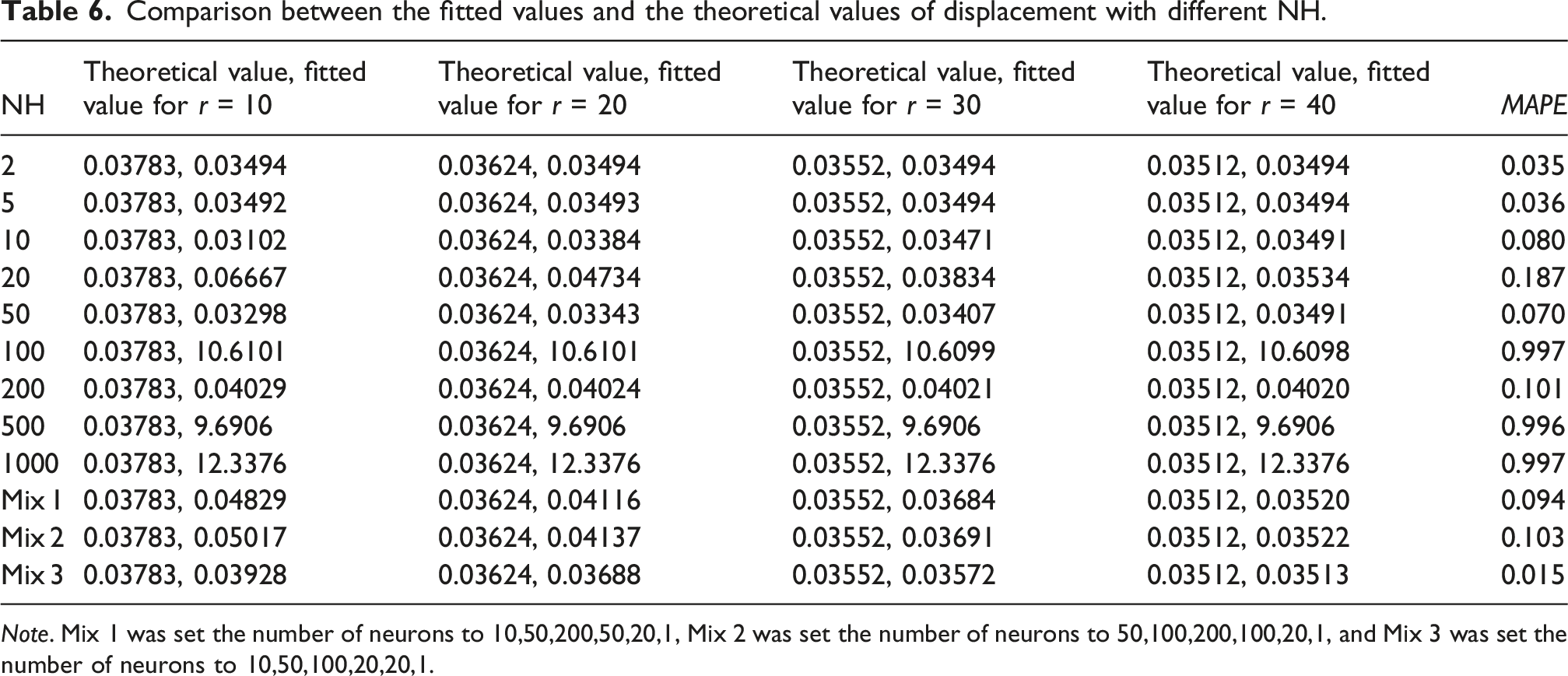
Note. Mix 1 was set the number of neurons to 10,50,200,50,20,1, Mix 2 was set the number of neurons to 50,100,200,100,20,1, and Mix 3 was set the number of neurons to 10,50,100,20,20,1.
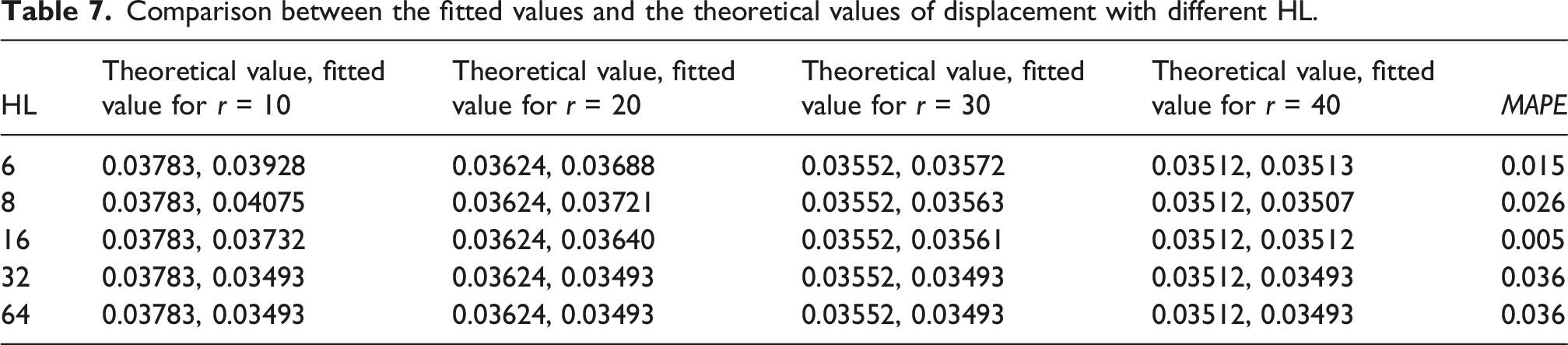
Comparison between the fitted values and the theoretical values of displacement with different HL.
Physics-guided probabilistic deep learning-based modeling stability analysis
Stability analysis of circumferential stress fitting
Factors affecting the fitting effect of physics-guided probabilistic deep learning include HL, NH, and different weight calculation methods etc. In order to explore the effect of different ways, the cracking process was modelled when HL was 2 layers, NH was 50, the number of probability layers was 1, the TS was 50, and the number of epochs was 20,000, and W was 0.06 mm. The results of two different ways of weights calculation, reparameterization and Flipout are shown in Figure 13. The theoretical value of the circumferential stress at a radius of 10 mm is −4.79 MPa. It could be seen that the convergence speed of Flipout was not as fast as that of the reparameterization method. Flipout estimates the gradient by introducing a special kind of noise, whereas the reparameterization method directly transforms the stochastic variable into a deterministic one by means of the differentiable transformation. The noise introduced by Flipout may affect the model parameter updating to some extent, making the convergence speed slower. The effect of different weight calculation methods on the effectiveness of the fit. (a) Reparameterization; (b) Flipout.
In order to explore the effect of different HL, the cracking process was modelled when NH was 50, the number of probability layers was 1, the TS was 50, and the number of epochs was 20,000, the gradient was calculated by the reparameterization method, and W was 0.06 mm. The fitting effect of the networks with HL of 2, 10 and 50 layers was compared, respectively, as shown in Figure 14. The theoretical value of the circumferential stress at a radius of 10 mm is −4.79 MPa. From the figure, it could be seen that excessively increasing the HL could not increase the performance of the prediction, but rather decreased it. This show that adding HL can improve the expression ability of the model, but this improvement is bounded. When the complexity of the model exceeds a certain limit, further adding HL may not significantly improve the performance, but rather increase the computational cost and reduce the running efficiency of the code. The effect of HL on the effectiveness of the fit. (a) HL = 2; (b) HL = 10; (c) HL = 50.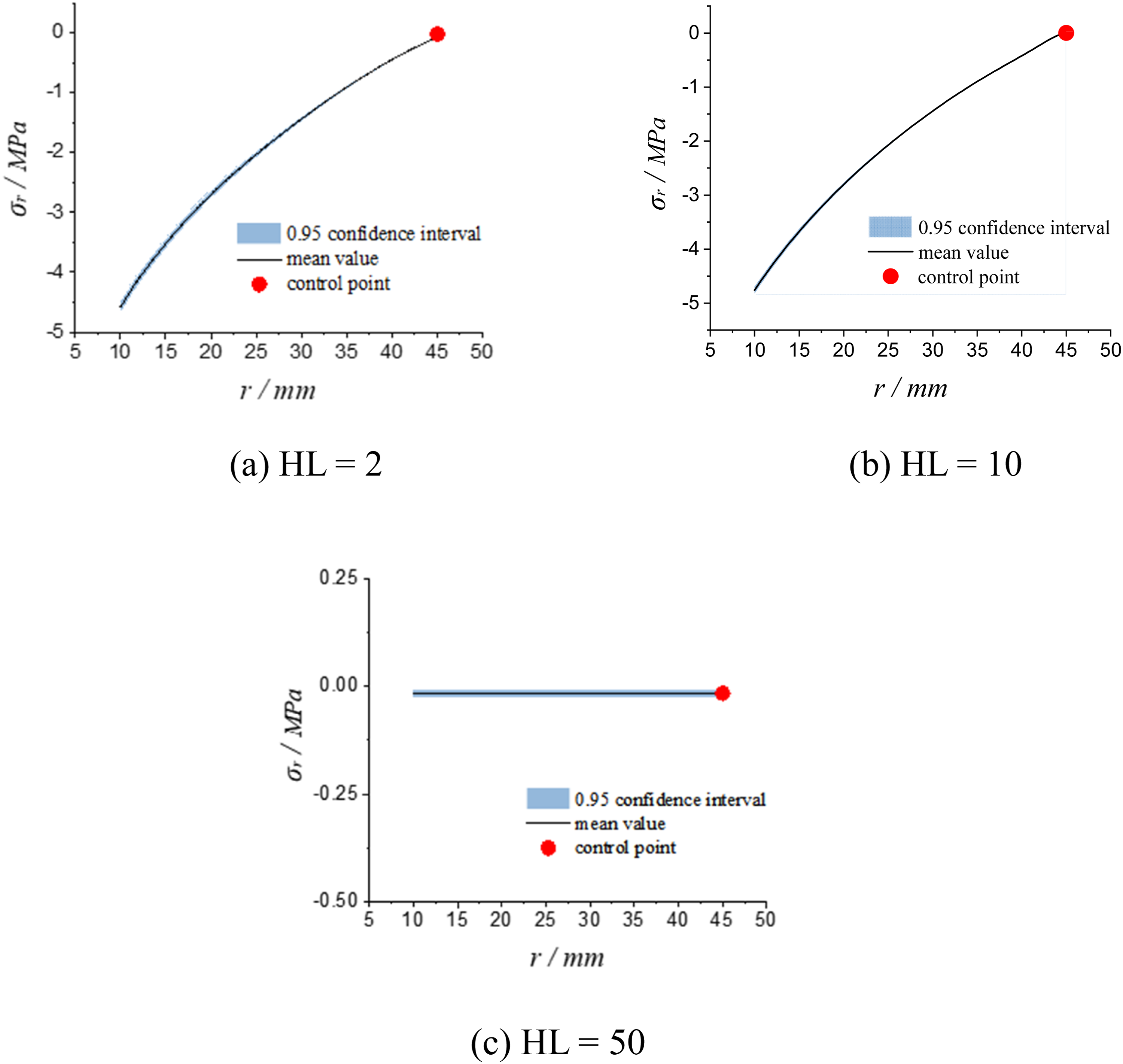
In order to explore the effect of different NH, the cracking process was modelled when HL was 2, the number of probability layers was 1, the TS was 50, and the number of epochs was 20,000, the gradient was calculated by the reparameterization method, and W was 0.06 mm. The fitting effect of the network was compared when the NH was 5, 50, and 300, as shown in Figure 15. When the NH was drastically reduced, the prediction was significantly distorted. It means that the number of parameters of the model decreases, resulting in insufficient capacity of the model to capture complex patterns in the data. Increasing the NH results in a significant increase in the uncertainty of the prediction, while the performance of the prediction is not significantly improved. Increasing the NH will make it easier to fit the noise in the training data, and thus the model’s prediction uncertainty will increase. At this point, the model has already reached the upper limit of its expressive capacity. Thus, continuing to increase the number of neurons will only lead to an increase in the model’s complexity, and will not improve the model’s prediction performance. The effect of NH on the effectiveness of the fit. (a) NH = 5; (b) NH = 50; (c) NH = 300.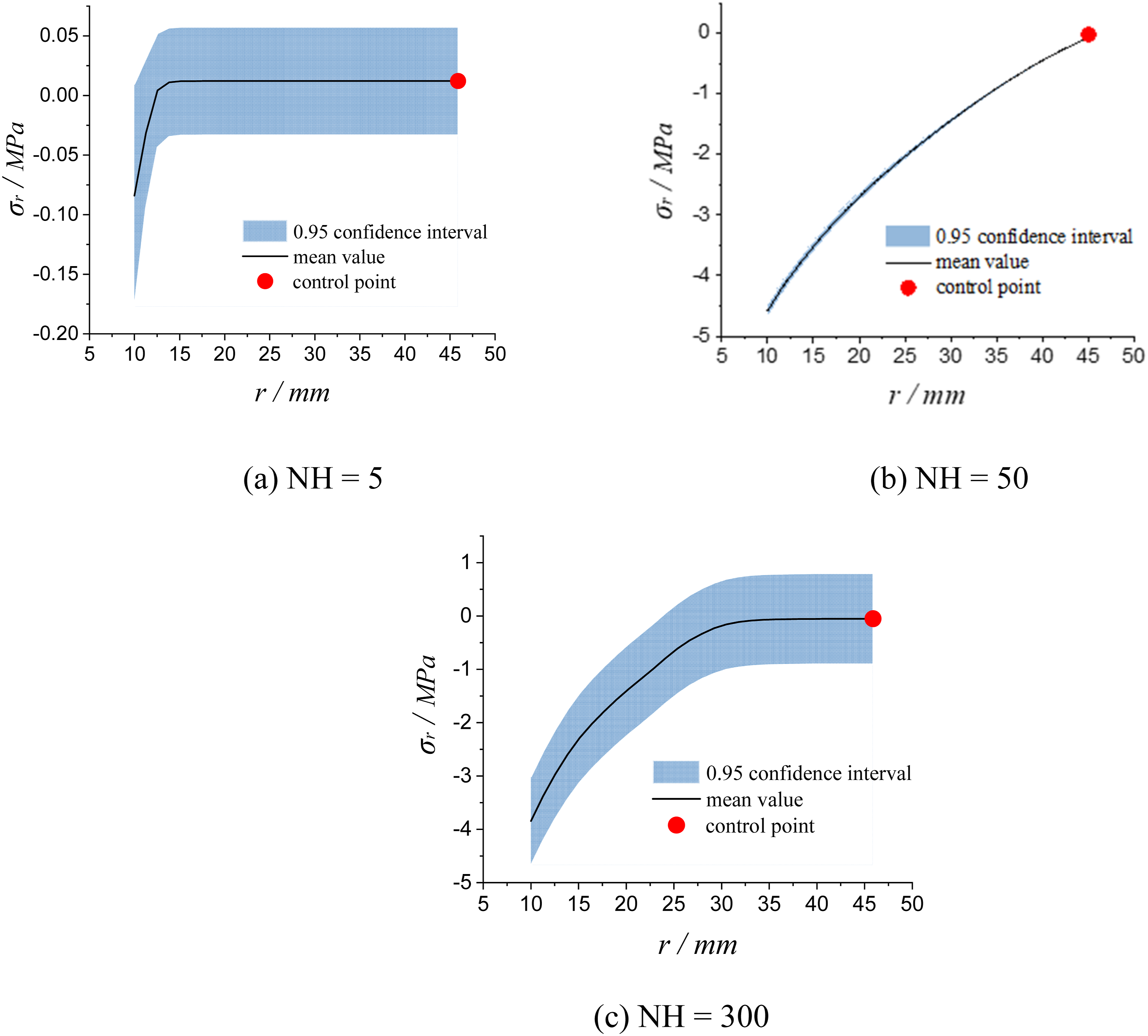
Stability analysis of radial displacement fitting
In order to explore the effect of different weight calculation methods, the cracking process was modelled when HL was 6, the number of probability layers was 1, the TS was 50, and the number of epochs was 20,000, the number of neurons in the hidden layer was set to 10,50,100,20,20,1, and W was 0.2 mm. The fit of two different weights, reparameterization and Flipout was compared, as shown in Figure 16. The uncertainty interval of Flipout was large, and the convergence speed was not as fast as that of the reparameterization method, which was the same as the results and reasons of the stress part. From a practical standpoint, the reparameterization method is recommended for this problem due to its faster convergence and narrower uncertainty intervals. The Flipout method, while theoretically providing more decorrelated gradient estimates within a mini-batch, introduces additional noise that slows convergence when the training set is small, as is the case here. For problems with larger datasets or mini-batch training, Flipout may offer advantages in gradient estimation efficiency. The effect of different weight calculation methods on the effectiveness of the fit. (a) Reparameterization; (b) Flipout.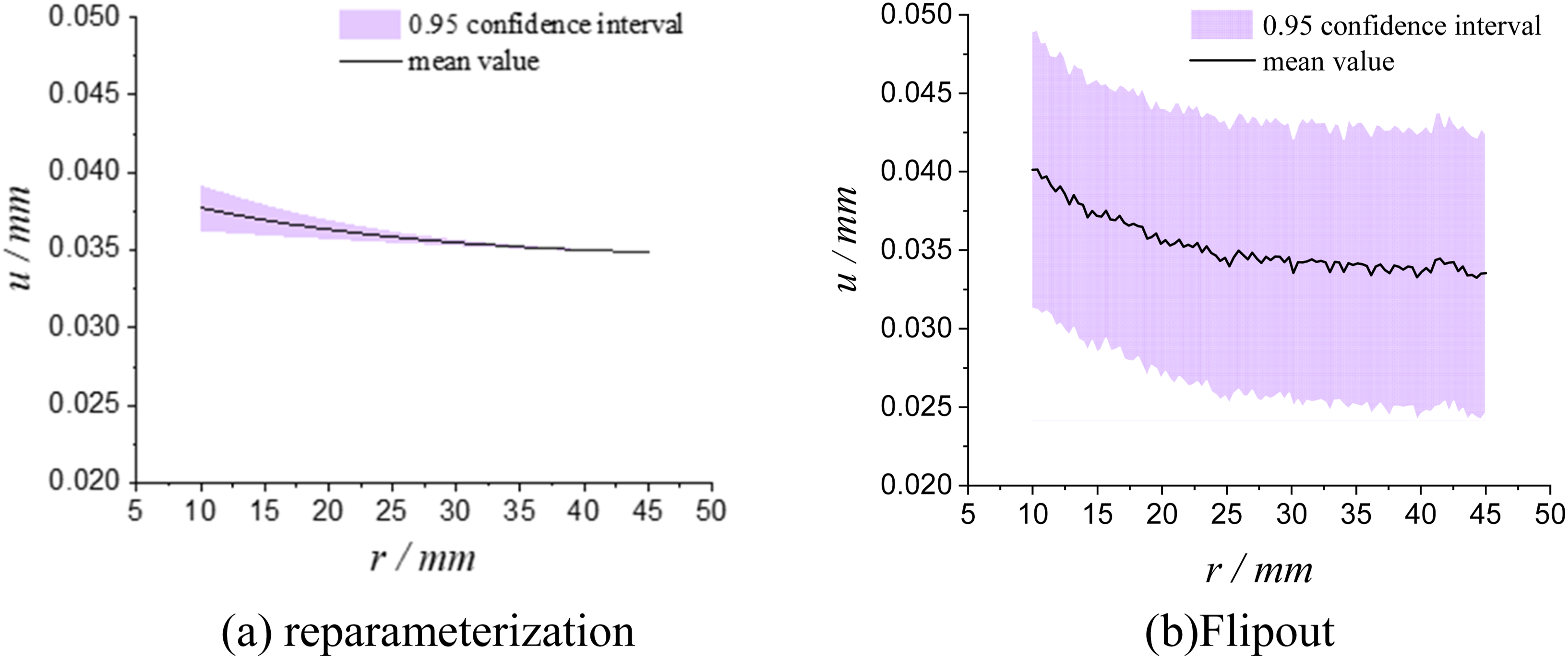
In order to explore the effect of different HL, the cracking process was modelled when HL was 6, the number of probability layers was 1, the TS was 50, and the number of epochs was 20,000, the weights were calculated by the reparameterization method, the number of neurons of the first two layers is 10,50, the number of neurons of the last three layers is 20, 20, 1, the number of neurons in the middle hidden layers is 100, and W was 0.2 mm. The number of layers of hidden layers with 100 neurons was transformed, as shown in Figure 17. The theoretical value of displacement is 0.03,783 mm for the radius of 10 mm and 0.03,497 mm for the radius of 45 mm. The addition of the hidden layer did not significantly increase the performance of the prediction, but rather made the code run slower, which was the same result and reason as in the stress section. The effect of HL on the effectiveness of the fit. (a) HL = 6; (b) HL = 8; (c) HL = 16; (d) HL = 32.
In order to explore the effect of different number of probability layers, the cracking process was modelled when HL was 6, the number of probability layers was 1, the TS was 50, and the number of epochs was 20,000, the weights were calculated by the reparameterization method, the number of neurons in the six hidden layers was set to 10, 50, 100, 20, 20, 1, and W was 0.2 mm. The fitting effects of the penultimate layer set as deterministic and probabilistic network layers respectively were compared respectively in Figure 18. Increasing the number of probabilistic layers increased the uncertainty of the predictions and did not increase the performance of the predictions, instead it made the code run slower. This indicates that as the number of probability layers increases, the randomness introduced in the model accumulates and the uncertainty increases. Meanwhile, the introduction of probabilistic layers usually increases the computational complexity of the model, thus increasing the training time. The effect of the number of probability layer on the effectiveness of the fit. (a) The number of probability layer layers is 1; (b) The number of probability layer layers is 2.
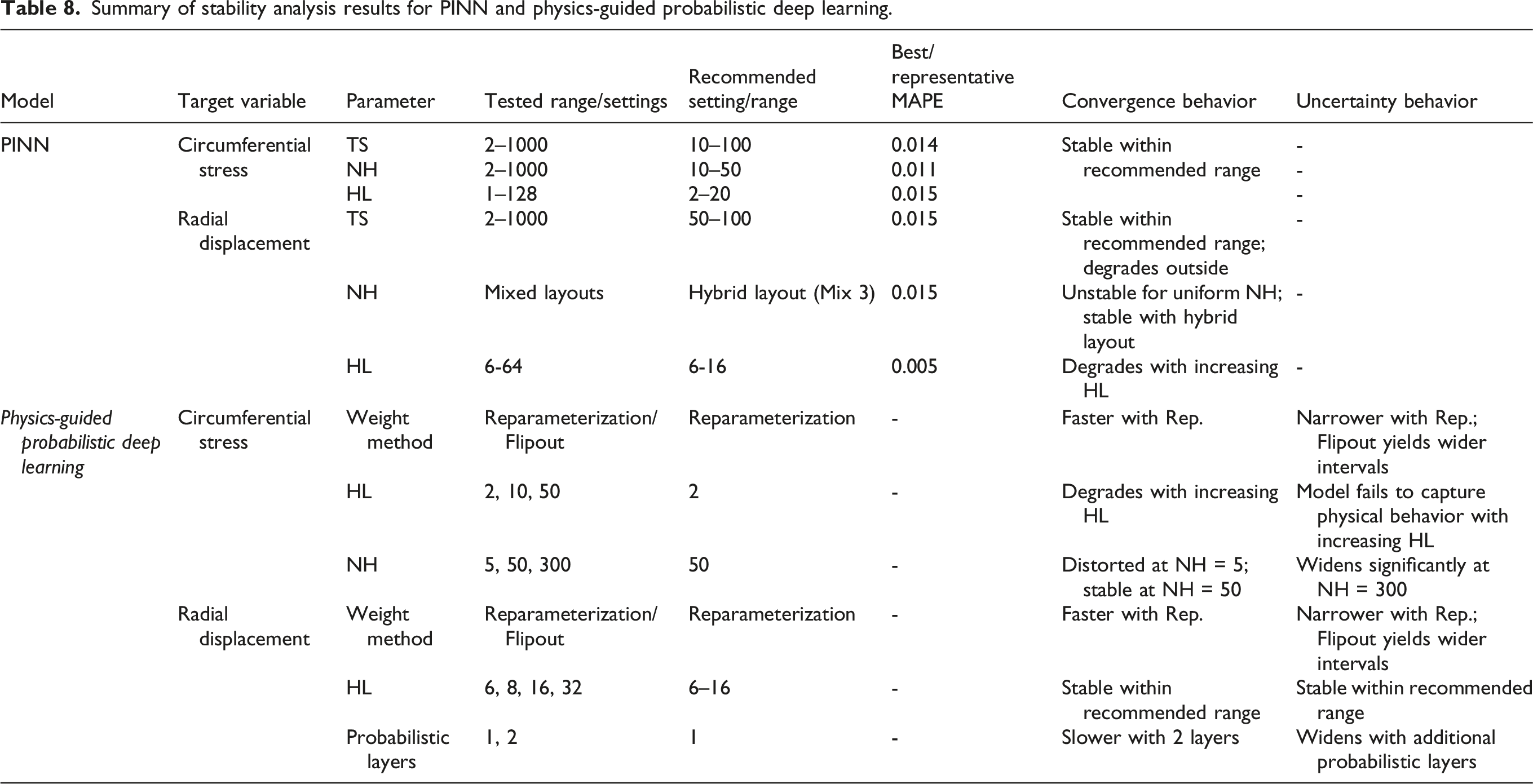
Summary of stability analysis results for PINN and physics-guided probabilistic deep learning.
Conclusions
In the study, focusing on the cracking model of corroded steel-bar concrete at the stage of complete cracking, damage theory was used for corrosion cracking, and diffuse crack theory was used for the crack distribution case. Steel-bar concrete was simplified into an anisotropic thick-walled cylinder, and the cracking process was modeled with physics-guided probabilistic deep learning. The results of the study can be summarized as follows: (1) Focusing on the complete cracking stage, for solving the differential equations triggered by the change of circumferential stress and displacement with radius, physics-guided probabilistic deep learning was applied. The MAPE values of the corrosion expansion force and the radial displacement of the steel-bar concrete contact surface were 0.58% and 4.6%, respectively. (2) This provided a new idea for the modeling process of the cracking stage of corroded steel-bar concrete and the subsequent problem solving. It also achieved a quantitative analysis of the uncertainty of the output results, and increased solution performance and generalization ability. (3) Modeling stability analysis of cracking in corroded reinforced concrete for PINN was achieved. In the fitting process of stress, the optimal interval of the TS was 10-100, the optimal interval of the NH was 10–50, and the optimal interval of the HL was 2–20; in the fitting process of displacement, the optimal interval of the TS was 50–100, and the optimal effect was achieved by setting the NH to increase firstly and then decrease, and the optimal interval of the HL was 6–16. (4) Modeling stability analysis of cracking in corroded reinforced concrete for physics-guided probabilistic deep learning was achieved. The TS, the NH, and the HL should likewise not be too large or too small; The convergence speed of the weight calculation method Flipout was not as fast as that of the reparameterization method; Increasing the number of probabilistic layer layers increased the uncertainty of prediction, and did not increase the performance of prediction.
The primary novelty of this study lies in the integration of Bayesian inference into the PINN framework, enabling the model to move beyond deterministic predictions and produce probabilistic outputs with quantified uncertainty. This physics-guided probabilistic deep learning approach bridges the gap between physics-based modeling and uncertainty-aware machine learning in the context of corrosion-induced cracking in reinforced concrete. From a practical engineering perspective, the proposed framework offers a computationally efficient alternative to conventional numerical methods for assessing the cracking process in corroded reinforced concrete structures. The quantified uncertainty bounds on the predicted corrosion expansion force and radial displacement can directly support structural inspection decision-making, remaining service life estimation, and risk-based maintenance planning. This is particularly valuable in practical scenarios where experimental data are scarce or material parameters are subject to variability.
Nevertheless, several limitations should be acknowledged. The framework is validated against analytical solutions rather than independent experimental data, the uniform corrosion assumption may not capture non-uniform corrosion patterns in chloride-dominated environments, and the simplified thick-walled cylinder geometry may not represent complex structural configurations in practice. Future research could address these limitations by incorporating experimental validation using published corrosion cracking datasets, extending the model to non-uniform corrosion and two- or three-dimensional geometries, and investigating the transferability of the recommended hyperparameter ranges to other structural configurations.
Footnotes
Acknowledgments
The authors gratefully acknowledge the support from the Deep Earth Probe and Mineral Resources Exploration-National Science and Technology Major Project (Grant No. 2024ZD1004103), the Special Funding Support for Taishan Scholars Project (Grant No. tsqn202408036) and the Shandong Provincial Natural Science Foundation (Grant No. ZR2025QC1114).
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by The Deep Earth Probe and Mineral Resources Exploration-National Science and Technology Major Project; 2024ZD1004103. The Special Funding Support for Taishan Scholars Project; tsqn202408036. The Shandong Provincial Natural Science Foundation; ZR2025QC1114.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.