
Abstract
Simultaneous control of wind turbine blades and tower vibrations is studied in this article. Four active tuned mass dampers have been incorporated into each blade and tower to reduce vibrations. A decentralized constrained H∞ velocity output feedback which restricts the tuned mass damper stroke as a hard constraint is proposed by solving linear matrix inequality. Each active tuned mass damper is driven individually by the output of the corresponding velocity signal. Considering the structural dynamics subjected to gravity, variable rotor speed, and aerodynamic loadings, a model describing dynamics of rotating blades coupled with tower, including the dynamics of active tuned mass dampers, was developed by Euler–Lagrangian formulation. A numerical simulation is carried out to verify the effectiveness of the proposed decentralized control scheme. Investigations show promising results for the active tuned mass damper in simultaneous control blade vibrations and tower vibrations by decentralized control approach. Numerical results demonstrate that the decentralized control has the similar performance compared to centralized control and effectively reduce the displacement of vibrations.
Introduction
With the increasing length of blades, uncontrolled vibrations can cause structural damage which could decrease the life of the blades (Larsen and Hansen, 2004). To suppress the vibrations, researchers have studied two methodologies. In the first methodology, the pitch control is used (Corradini et al., 2017) for changing the lift and drag forces to control aerodynamic loads. Noting that the pitch control is coupled with power regulation or speed regulation, this may be not properly suited for load reduction (Rice and Verhaegen, 2010). The second method is active structural control used in civil engineering to directly restrain the blade or the nacelle vibrations. In the study by Staino and Basu (2015), a dual control strategy decoupling pitch control and vibration control was proposed. Previous work on structural control focused on the damping devices. Tuned mass damper (TMD), which is successfully applied in the vibration control of mechanical engineering (Rahman et al., 2016) and structural engineering (Yazdi et al., 2016), dissipated vibration energy by tuning to a structural resonance frequency. Due to the hollow inside of blades and the nacelle, the damper installed inside of these components can independently on speed or power regulation. For mitigation of a wind turbine tower, Murtagh et al. (2005) proposed a passive TMD placed on the top of the tower for reduction vibration. Lackner and Rotea (2011) modified the simulation code of wind turbine called FAST by adding two TMDs within side-side and fore-aft direction into the nacelle, thus adding structural control capacity to FAST. The control structure interaction in active control and actuator dynamics was considered in Stewart and Lackner (2013) implementing this modified version. Brodersen et al. (2017) demonstrated that the active tuned mass damper (ATMD) can be used to further reduce the tower displacement of wind turbines without an increase in damper mass, where the additional actuator force is controlled using velocity feedback. For suppressing blade vibration, there are few studies regarding structural control. Arrigan et al. (2011) used the semi-active TMDs to control flapwise vibrations. Dinh et al. (2016) used semi-active TMD to control the vibrations of blades, nacelle, and spar in an offshore wind turbine. Because the active control has better control effect. Fitzgerald et al. (2013) proposed utilizing active TMD for suppressing edgewise vibrations. It was noted that the active TMDs can provide better reduction than the passive TMDs. Fitzgerald and Basu (2014) further proposed a cable connected active TMD to suppress edgewise vibrations. Because the aerodynamic damping in the edgewise direction is low, in this article, we concentrate on suppressing the edgewise vibrations. Inspired by the works of Fitzgerald et al. (2013), Fitzgerald and Basu (2014), and Dinh et al. (2016), this article explores simultaneous control of the blade and tower vibrations by ATMDs. In previous articles, the authors focus on the feasibility of damper design and the control strategy using a state feedback control. In practical implementation, full knowledge of the state vector is rarely available. An available approach is an output feedback control. Another flaw in applying the linear quadratic regulator (LQR) approach is that the control design cannot directly handle the constraint as the TMD stroke must be restricted due to the working space. Meanwhile, the centralized control strategy needs a large number of sensors and communication network, and this may have a poor reliability. For large-scale structures, decentralized control is a more practical approach. Compared to dynamic output feedback control, static output feedback control has a simple dynamic (Sadabadi and Peaucelle, 2016). Thus, a decentralized constrained
Theoretical model for the wind turbine with decentralized ATMD system
In this article, we focus on control of the vibrations in edgewise direction of blades and make the basic assumption that the coupling between the edgewise and flapwise can be ignored, that is, the pre-twist angle is zero; this has a little effect on the accuracy according to the conclusion in Basu et al. (2016). Hence, the design and analysis of the decentralized control are fully based on the edgewise vibrations coupled with the nacelle side-side vibrations. A reduced 8-DOF wind turbine model is presented in which each blade and nacelle is equipped with one ATMD. Figure 1 illustrates the schematic representation of blades coupling with nacelle/tower. To derive a theoretical model, the motion of each blade is described in a co-rotating blade coordinate system

A schematic diagram of ATMDs in blade and nacelle.
Denoting the kinetic energy and potential energy as T and V, respectively, by the classical Euler–Lagrange method, the equations of motion are given by
where q and Q are the modal coordinate and the modal loading acting on the blade or the nacelle for the corresponding degree of freedom, respectively.
The governing differential equations of vibration are obtained by applying the Euler–Lagrangian approach. Based on the methodology developed by Fitzgerald et al. (2013), Fitzgerald and Basu (2014), and Dinh et al. (2016), the ATMD system can be enrolled in the differential equations of motion. To represent the blade motions, a position vector in the blade frame consists of a vector of a radius x and a vector of nacelle motion; this can be represented by the unit vector

where the transformation matrix is

where
In the process of modeling, each blade is assumed as a Bernoulli–Euler cantilever beam which rotates about the hub’s horizontal axis. The geometric parameters are non-uniform with distributed mass density

where
The blades’ potential energy consists of the potential energy caused by bending stiffness, the potential energy generated by centrifugal stiffness, and the potential energy from gravitation. Adding the potential energy of nacelle, the total potential energy is

where
In this system, the total generalized external forces acting on the blade and the nacelle consist of the modal aerodynamic load

where

where

where
The aerodynamic load on the nacelle is

The gravity load on the nacelle is zero and on each blade is

where g is the gravity acceleration.
The generalized coordinates is denoted by

The details of the matrices are given in Appendix 1.
In the closed-loop system, four mass dampers were incorporated into the model, three placed inside each blade to control the response of the blade with mass
The position vector of the TMD which is located at a location

where
The kinetic energy and potential energy of all TMDs are


where

The details of the matrices are given in Appendix 1. In Fitzgerald et al. (2013), Fitzgerald and Basu (2014), and Dinh et al. (2016), the rotor speed is assumed as constant. When the wind turbine is working at variable rotor speed, the forces act on the blade and the TMD induced by variable rotor speed is derived from the kinetic energy term and added to the external force. This is calculated by

The actuators of the TMD are ideal actuation devices which are modeled as an external force F acting on the system by the principle of virtual work. Thus, the total generalized external force is given by

Because of the space limitation to incorporate the TMD, the stroke of TMD must be restricted. This can be represented as


where
The control design is to guarantee that the closed-loop system is stable under disturbance and satisfy the hard constraint (18).
Decentralized H∞ static output feedback control
By modifying equation (14) according to the structural constraints, we consider the system with decentralization input and output pairs depicted as follows
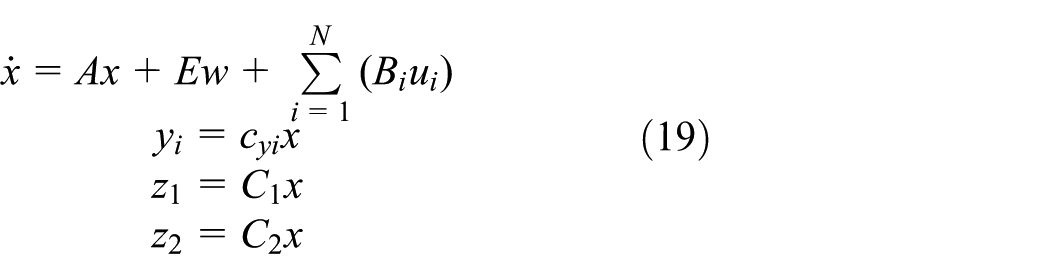
where x denotes the state; N is the number of the input and output pairs; u and w denote the control input and the disturbance input, respectively;
The controller design is a two-step procedure. First, a state-feedback controller is

Thus, the closed-loop system can be rewritten as

From the Bounded Real Lemma (Gao et al., 2010),

Denoting the variables

It is noted that the value of

If the problem (24) is feasible with respect to X and Y, then the state-feedback gain is
For the output case, the aim is to find a gain matrix F which satisfies

which is similar to the derivation in Gao et al. (2010). Since the closed-loop system satisfies the

Using Cauchy–Schwarz inequality and Schur complement, the constraint can be written by equation (27)

To obtain an optimal level of disturbance attenuation, the constrained

If the problem (28) is feasible with respect to
Decentralized control of simultaneously control blades and tower vibrations
In this section, the decentralized control to simultaneously suppress blades and tower vibrations are checked out. We simulated a wind turbine in MATLAB using the data from NREL 5-WM reference wind turbine. Table 1 provides the data of this wind turbine. More details of the parameters are given in Jonkman et al. (2009).
Properties of NREL 5-MW wind turbine (Jonkman et al., 2009).

NREL: National Renewable Energy Laboratory.
The mode shapes are a six-order polynomial of distance

Due to rotating, the uncertainties in the damp and stiffness matrices caused by rotating are incorporated into the disturbance. Thus, w can be represented as

The additional actuator force is controlled using output feedback from the relative velocity of the damper and the measured velocity signal of the blade or the nacelle where the damper installed. Thus, the measures are given as velocity matrices. In this article, the blade TMDs are located 45 m along the blades which in this location has a chord
Centralized and decentralized controllers
The controller was designed in MATLAB. Following the design procedure described as aforementioned, the matrix Q is given by MATLAB command null(), R is obtained by calculating the pseudo inverse of

The control feedback is given by

where
Simulation results
In this section, numerical simulations were performed to illustrate the efficacy of the decentralized control strategy. The wind turbine is operated at rated rotor angular velocity

Wind speed on the hub height and aerodynamic loads action on blades and nacelle.
In Table 2, a numerical comparison between the uncontrolled 4-DOF model with wind turbine software FAST (Jonkman and Buhl, 2005) is carried out which enables the corresponding DOF in the FAST to verify the accuracy of the model in this article. The response of blade 1 tip under wind speed
Results compared the 4-DOF uncontrolled model with FAST.
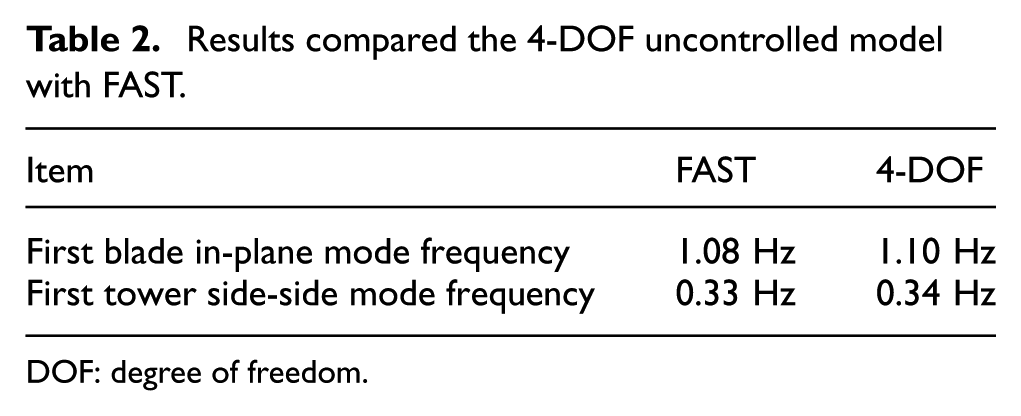
DOF: degree of freedom.
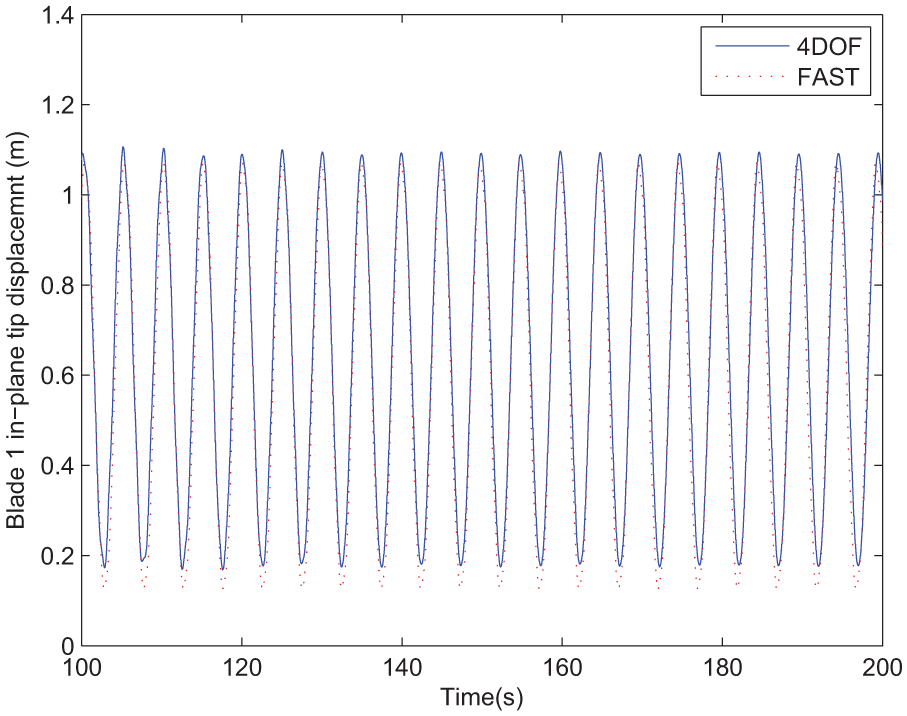
The blade 1 tip displacement between 4-DOF model and FAST.
In this simulation, the initial states are selected to be

Response of the wind turbine (Wind speed 12 m/s).

Response of the blade TMD (Wind speed 12 m/s).
The vibration control effect at a high load is crucial when the wind speed is rapidly changing. When considering an extreme wind speed with a

Response of the wind turbine (Wind speed 22 m/s).

Response of the blade TMD (Wind speed 22 m/s).
The root mean square (RMS) values of response displacement obtained by different control algorithms including the uncontrolled system, LQR, and the decentralized
The RMS value of displacements in different control algorithms.
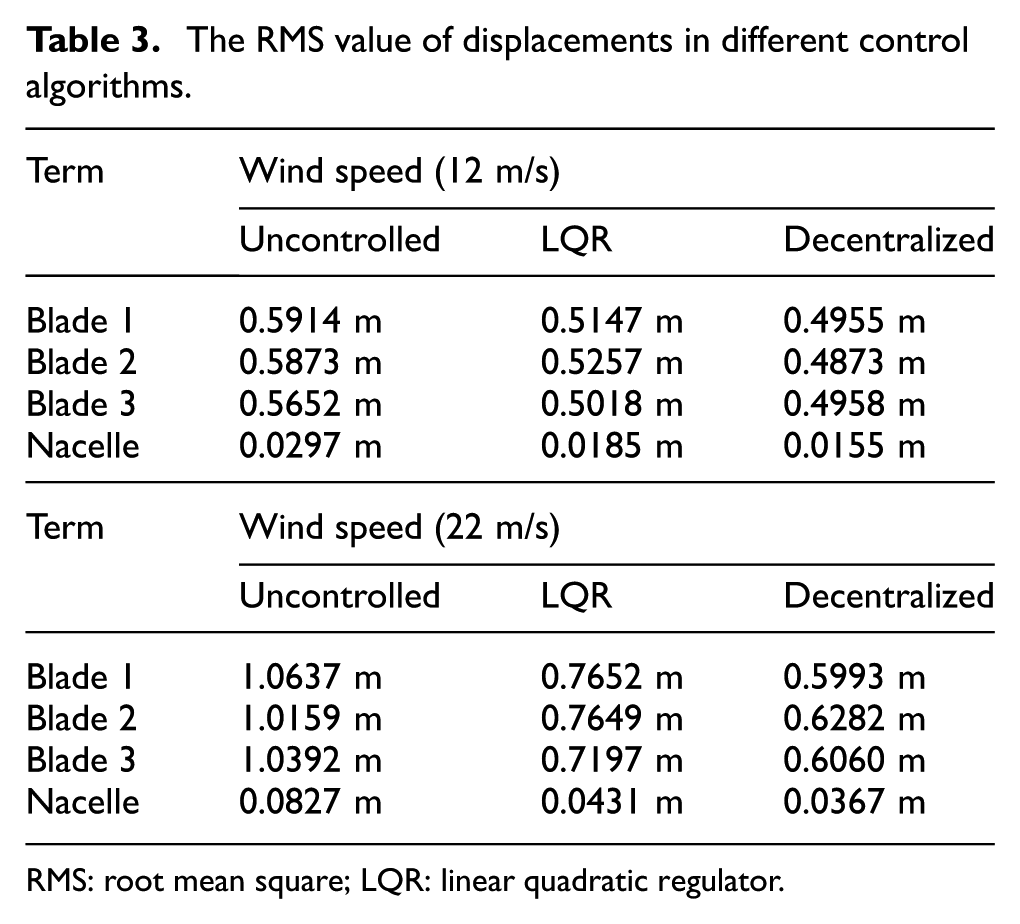
RMS: root mean square; LQR: linear quadratic regulator.
The RMS value of control forces.
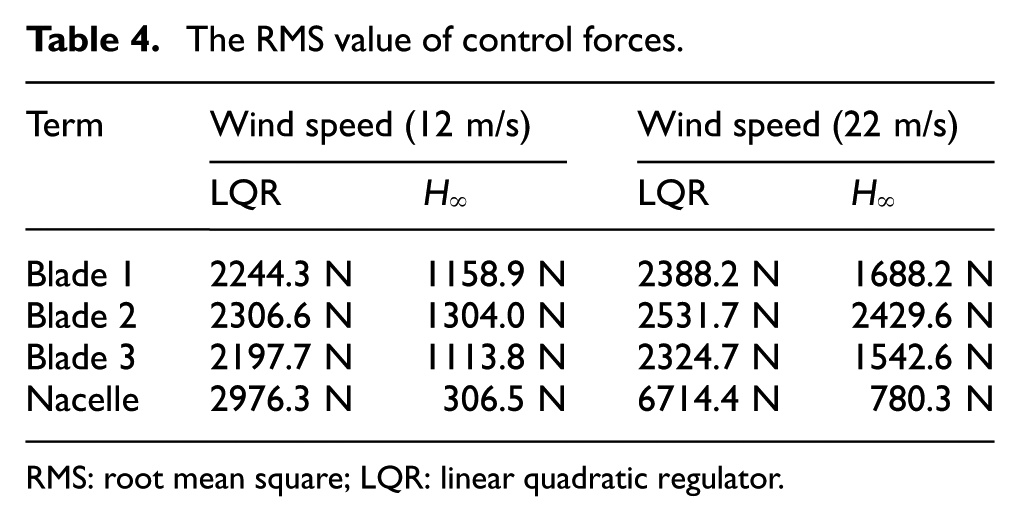
RMS: root mean square; LQR: linear quadratic regulator.
To analyze the frequency response, the power spectrum density (PSD) for the blade tip displacement and the nacelle are shown in Figure 8. It is noticed that under control action from both centralized state-feedback control and decentralized output feedback control, the peak of the first edgewise mode frequency (about

Comparison of power spectrum density in frequency 0–3 Hz.
Conclusion
In this article, simultaneously control vibrations for wind turbine blades and tower by ATMD with constrained stroke are studied in the article. A decentralized constrained
Footnotes
Appendix 1
System matrices for second matrix differential equation:
where
where
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.