
Abstract
The smooth orthogonal decomposition method (SOD) is an efficient algorithm that can be used to extract modal matrix and frequencies of lightly damped vibrating systems. It uses the covariance matrices of output-only displacement and velocity responses to form a generalized eigenvalues problem (EVP). The mode shape vectors are estimated by the eigenvectors of the EVP. It is stated in this work that the accuracy of the SOD method is mainly affected by the correlation characteristic of modal coordinate responses. For the damped vibration systems, biases will be contained in the results of using the SOD. Therefore, an iterative smooth orthogonal decomposition (ISOD) method is proposed to identify modal parameters of the damped system from the covariance matrices of the displacement, velocity, and acceleration responses. The modal matrix given by the SOD method is updated in each iteration step using a transformation matrix. The transformation matrix can be efficiently computed using a set of analytical formulations. Meanwhile, natural frequencies and damping ratios are obtained by using a simple search method. The performance of the proposed ISOD method is verified by numerical and experimental studies. The results demonstrate that, by considering the correlation of modal responses, the ISOD method can be used to extract accurately the modal information of vibration systems with coupled modes.
Keywords
Introduction
Extracting structural modal information from vibration measurement data has always been an important issue in structural vibration analysis. Modal parameter identification using output responses only has been widely used in engineering applications, since input excitations are not required to be measured (Ren and Zong, 2004; Sadhu et al., 2017). To date, numerous operational modal analysis (OMA) methods have been proposed. The most commonly used methods include the stochastic subspace identification (Chen et al., 2019; Liu and Loh, 2011; Zhang et al., 2012) and the frequency domain decomposition (Brincker et al., 2000; Pioldi and Rizzi, 2017). The stochastic subspace identification (SSI) is a time-domain identification method with relatively complicated operations. The Hankel matrix is formed by rearranging the measured data, and then the modal parameters are obtained by matrix decomposition technique. Finally, the stabilization diagram or other methods are used to select the real modes and remove the spurious ones. The frequency domain decomposition (FDD) is a frequency domain identification method and particularly suitable for well-separated modal identification.
In addition, many simpler methods have been developed, such as the proper orthogonal decomposition (POD) (Feeny and Kappagantu, 1998; Feeny and Liang, 2003; Kerschen and Golinval, 2002). The POD, also known as principal component analysis (PCA) or Karhunen–Loeve (KL) decomposition, aims to reduce the multidimensional data based on singular value decomposition (SVD) so that the dominant components sorted in singular values (descending order) can retain the main energy of the data (Bellizzi and Sampaio, 2006; Quaranta et al., 2008). These studies have revealed the relationship between the linear normal modes (LNM) and the proper orthogonal modes (POM) obtained from the POD. Although the POD algorithm is very simple and efficient, it can only be applied to systems with uniform mass distribution (
In recent years, more and more BSS algorithms are applied to the modal parameter identification under environmental excitations (Kerschen et al., 2007; Zhou and Chelidze, 2007). The modal parameter identification problem using the output-only responses is mathematically equivalent to a special case of the BSS problem. The physical coordinate vibration responses are
In most BSS algorithms (including POD and SOD), the modal coordinate response signals are always assumed to be uncorrelated to each other. In undamped or lightly damped vibration systems, the modal coordinate responses of each order can indeed be regarded as satisfying this assumption. However, when the damping is increased or the modes are closely-spaced, the results will be corrupted by errors. Although many studies have shown that the results of modal parameters of damped systems identified by using BSS, POD, and SOD are acceptable, they are biased estimates in nature. For this reason, this paper will study the correlation characteristics of modal coordinate responses of each order and derive the theoretical formula of the covariance matrix of modal coordinate responses at a given frequency band. Based on this analytical formula, an algorithm that iteratively rotates the smooth orthogonal matrix (SOM) obtained by SOD is proposed and obtain a more accurate mode shape. Thus, the proposed method is called iterative smooth orthogonal decomposition method (ISOD). This iterative process works similarly to the expectation-maximization (EM) algorithm that compute the most probable values of the Bayesian operational modal analysis (Li and Au, 2019). In fact, the idea of the iteration is also inspired by the EM algorithm. However, the algorithm in this paper has a higher calculation efficiency, since the EM-based algorithm needs to revisit all FFT data in each iteration, while the proposed approach only needs to calculate the initial covariance matrix, and it is not necessary to access the original data during the iteration.
The contents of this article are arranged as follows: Section 2 introduces the SOD theory and proposes a new form of the generalized eigenvalue problem; Section 3 derives the covariance matrix of the modal coordinate responses; Section 4 provides the structure of the iterative algorithm that improve the identification results of using SOD; Section 5 uses examples to validate the convergence and accuracy of the proposed algorithm.
The SOD method
The original smooth orthogonal decomposition for modal analysis (Chelidze and Zhou, 2006) was proposed to extract modal information of undamped free vibration system. The governing equation of the system is

where
The SOD method extracts mode shapes and natural frequencies from the generalized eigenvalue problem (EVP) below:

where the eigenvector

Comparing to equation (4) with the principle of CP method (Antoni et al., 2017; Yang and Nagarajaiah, 2013), it is found that the theoretical basis of the SOD is identical to that of the CP. These two residual signals of the CP method is corresponding to displacement and velocity responses of the SOD method. Therefore, the SOD method is a specific version of the CP method. The generalized EVP defined in equation (3) is expressed in the matrix form as

where
Let
It is noted that these covariance matrices are diagonal for an un-damped free vibration system. Solving the EVP of equation (5) is equivalent to eigenvalue decomposition of the matrix

From equation (7), the accuracy of the SOD method depends on how close the matrix
Taking transpose of the matrices in equation (7) and considering matrix symmetry, a new form of the SOD is obtained as

It is noted that the modal matrix
The covariance of modal responses
For the damped vibrating system, the decoupled modal coordinate responses are governed by

where

Also, let

Similarly,

Using Parseval’s theorem (Oppenheim and Schafer, 1999), the element at

where
where

Through signal derivation the velocity and acceleration FRFs are

It is shown in equation (14) that the covariance matrix

where

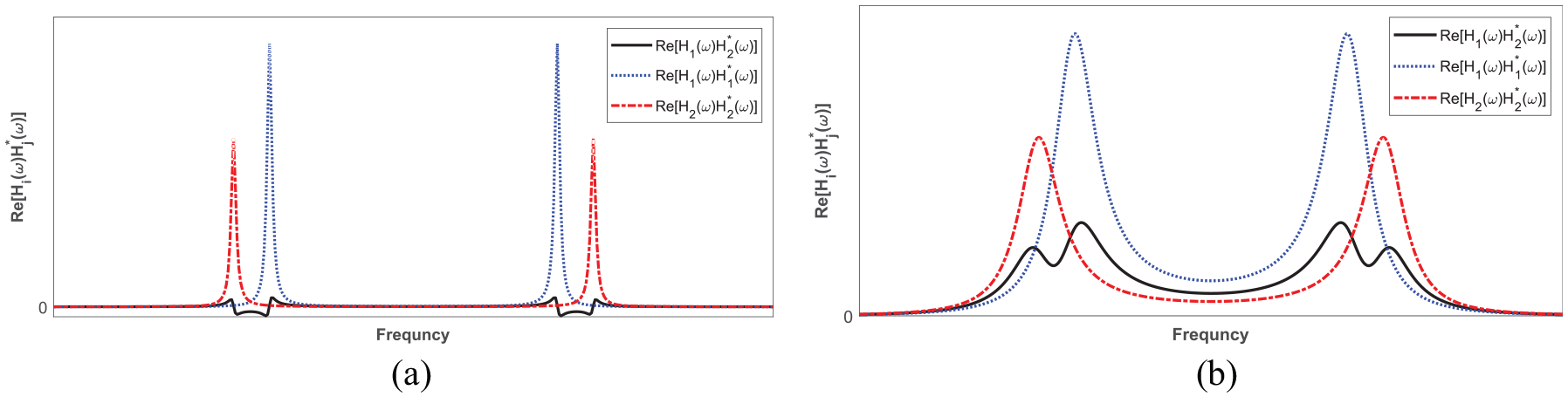
The frequency integration field of the original SOD method is

In Figure 1, the colored areas are used to present the integrations (for
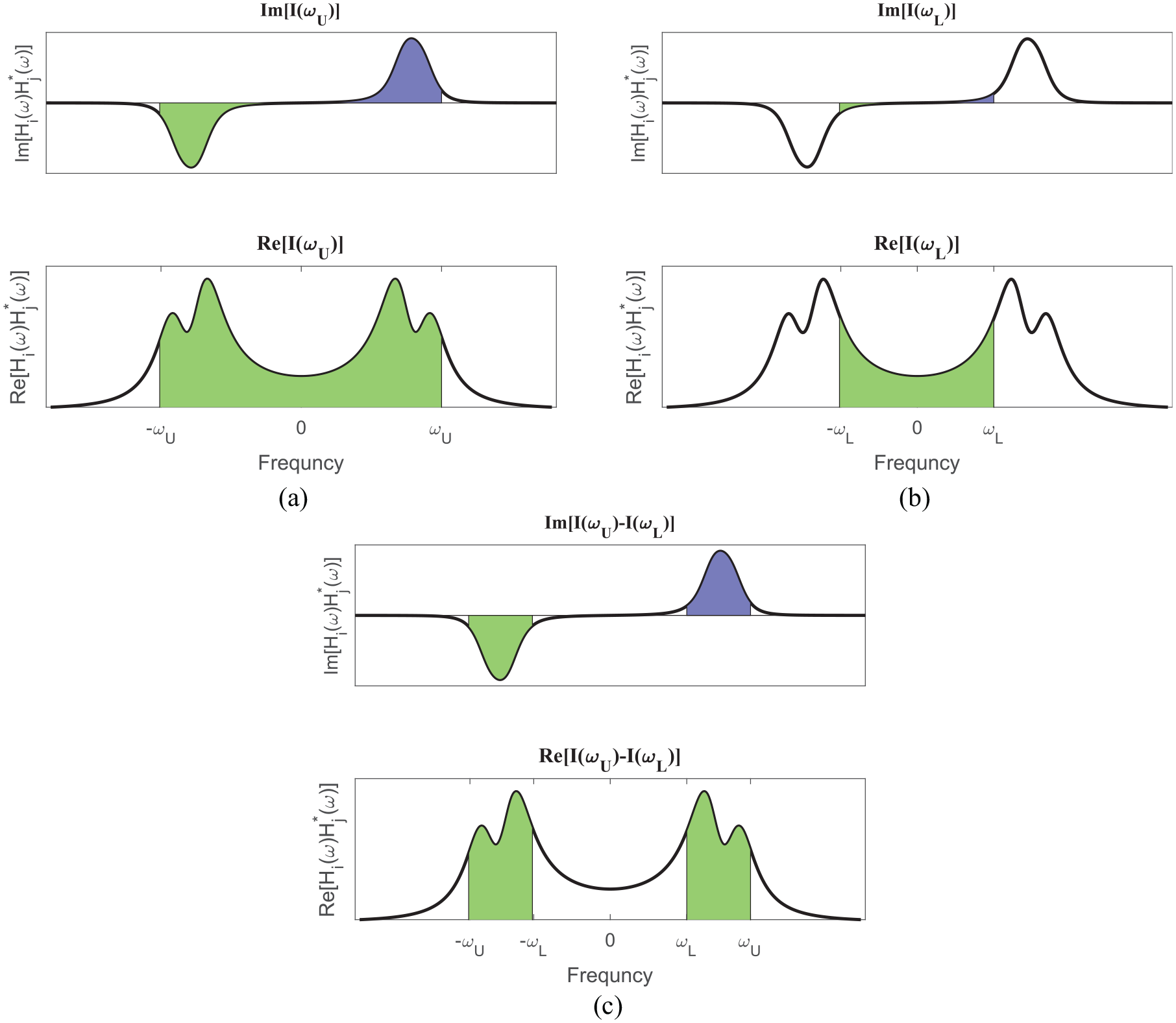
Schematic diagram of integrations: (a)
Taking the displacement responses as an example, the modal correlation coefficient (MCC) between the

The MCC is commonly utilized to compute earthquake responses of civil engineering structures (Wilson et al., 1981). With the analytical formulas presented in the Appendix, fast computing of this correlation coefficient can be carried out. This coefficient can be computed for the arbitrary frequency integration domain, so these formulas have potential application prospects in earthquake engineering.
The covariance of modal forces is presented as

where

The modal forces are not completely correlated in general cases (i.e.
Besides, it is noticed that the damping level also affects the accuracy of the SOD method. To understand this effect, the correlation relationship of a pair of modal coordinate responses is shown in Figure 2, (
Comparison of: (a) well-separated modes (
Iterative algorithm
According to the covariance of modal coordinate responses defined in the above section, we have

where

The matrix
For estimating the modal frequencies and damping ratios, the covariance matrices of modal coordinate data are approximately computed as
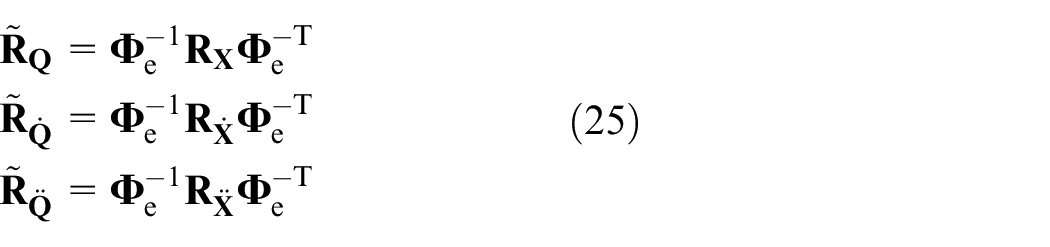
The initial value of

Equation (26) defines the relationship between the SOVs (

After obtaining (

Where “./” represents the entry-wise division of matrices. Therefore, an approximate value of the matrix

It can be decomposed by the eigenvalue decomposition

where the matrix

where, the matrix

where

Then the updated estimation of the modal matrix can be iteratively substituted into equation (25) till convergence. In each step, the columns of the modal matrix should be normalized so that their modulus is equal to 1. The norm of the difference between the two steps can be used as the convergence metric

where ‖■‖ is the norm of the matrix ■ (Frobenius norm is suggested). While the index

where
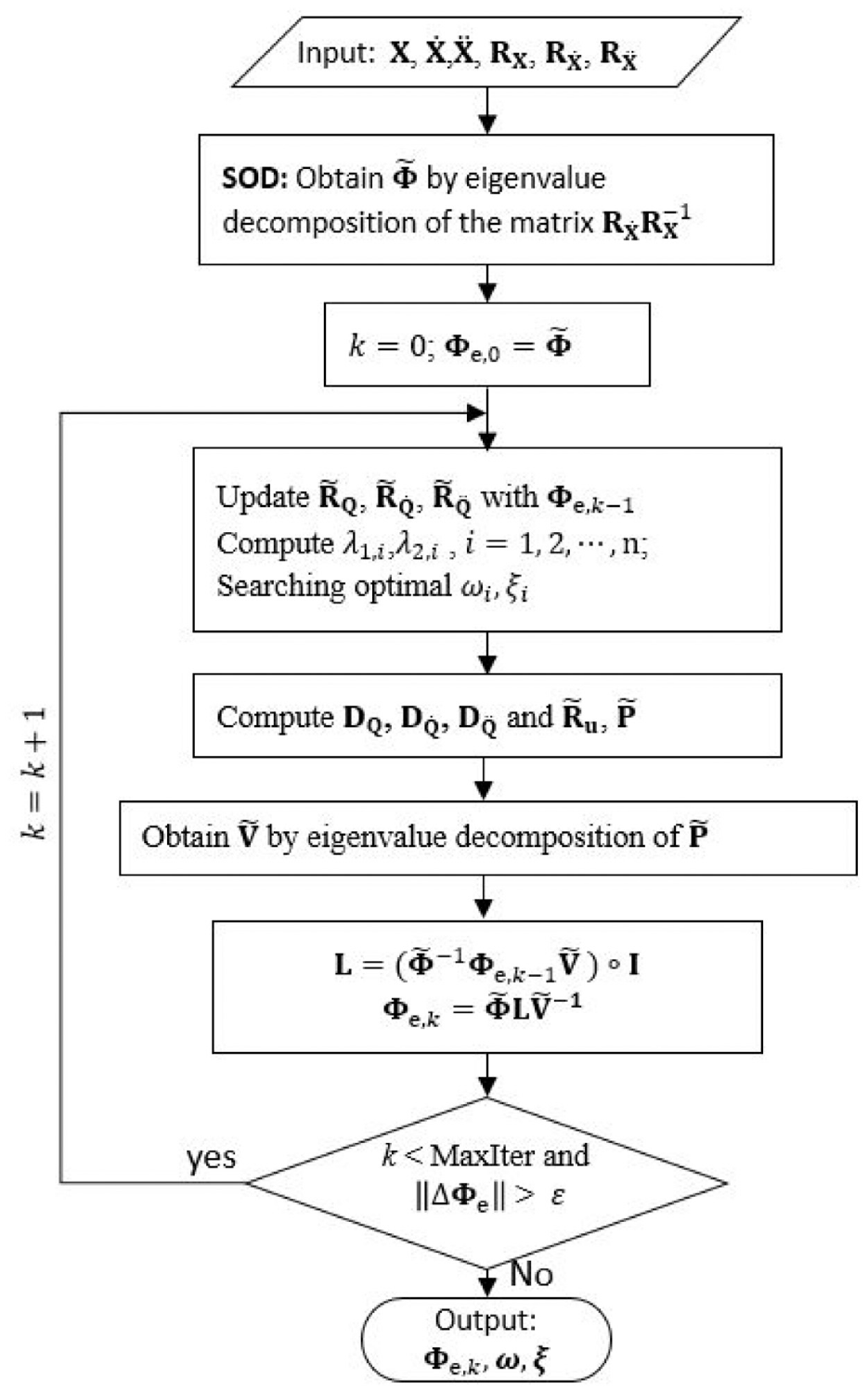
Flowchart of the ISOD algorithm.
Numerical studies
In this section, several studies are carried out to demonstrate the accuracy and performance of the proposed method. Firstly, a SDOF vibration system is studied to illustrate the principle for determining (
SDOF system
The search subroutine to find the optimal frequency and damping ratio is an important component of the iterative SOD method. It aims to find the optimal

If the sampling frequency is
Considering
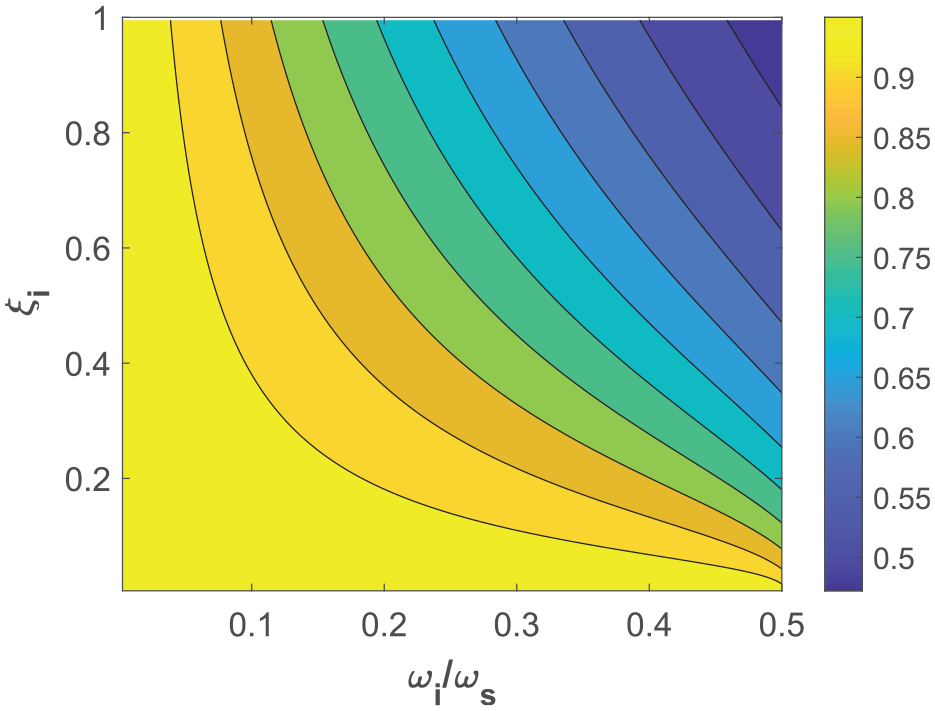
Contour of
In addition to
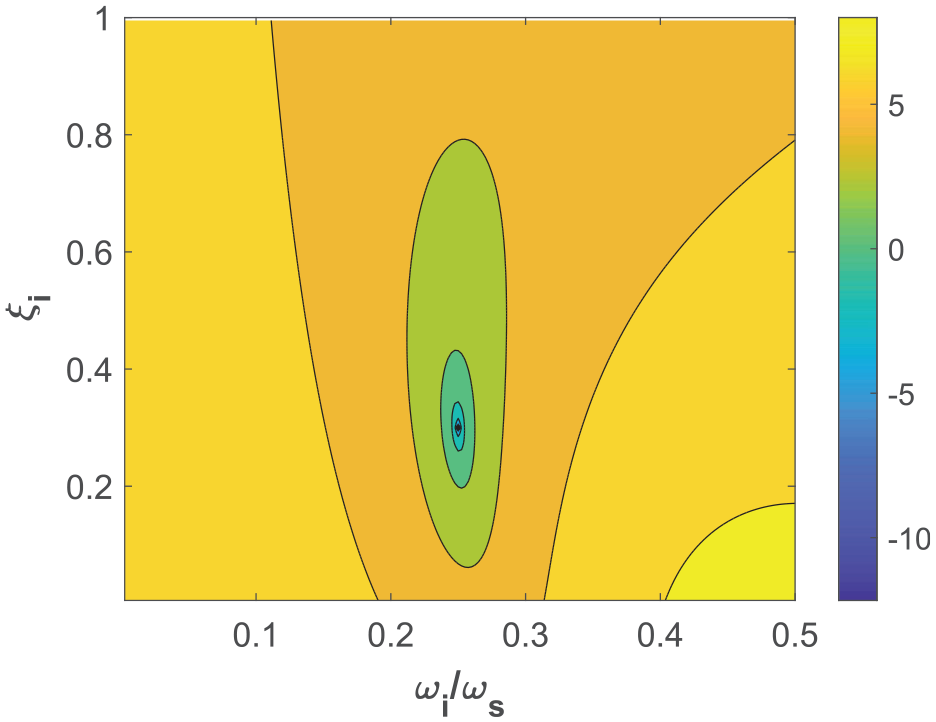
Contour of the objective function (logarithmic value) computed by equation (27) corresponding to optimal frequency 0.25
3-DOF system
The 3-DOF system shown in Figure 6 is studied here to demonstrate the performance of the proposed iterative method. The mass in the diagram is
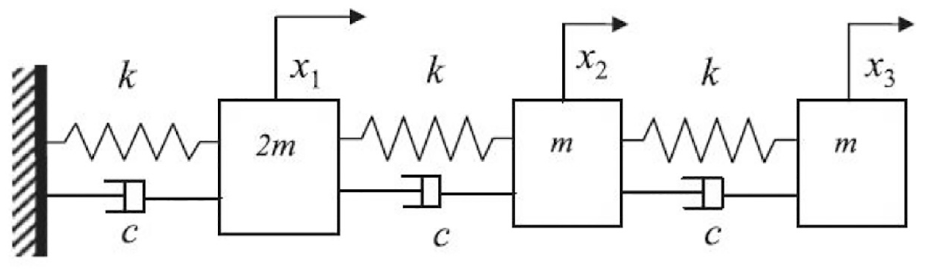
The 3-DOF vibration system.
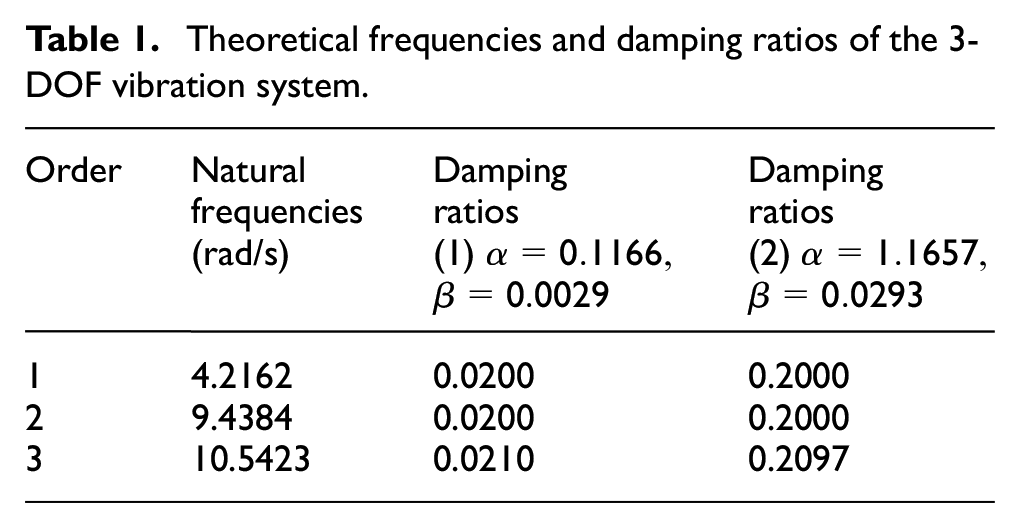
Theoretical frequencies and damping ratios of the 3-DOF vibration system.
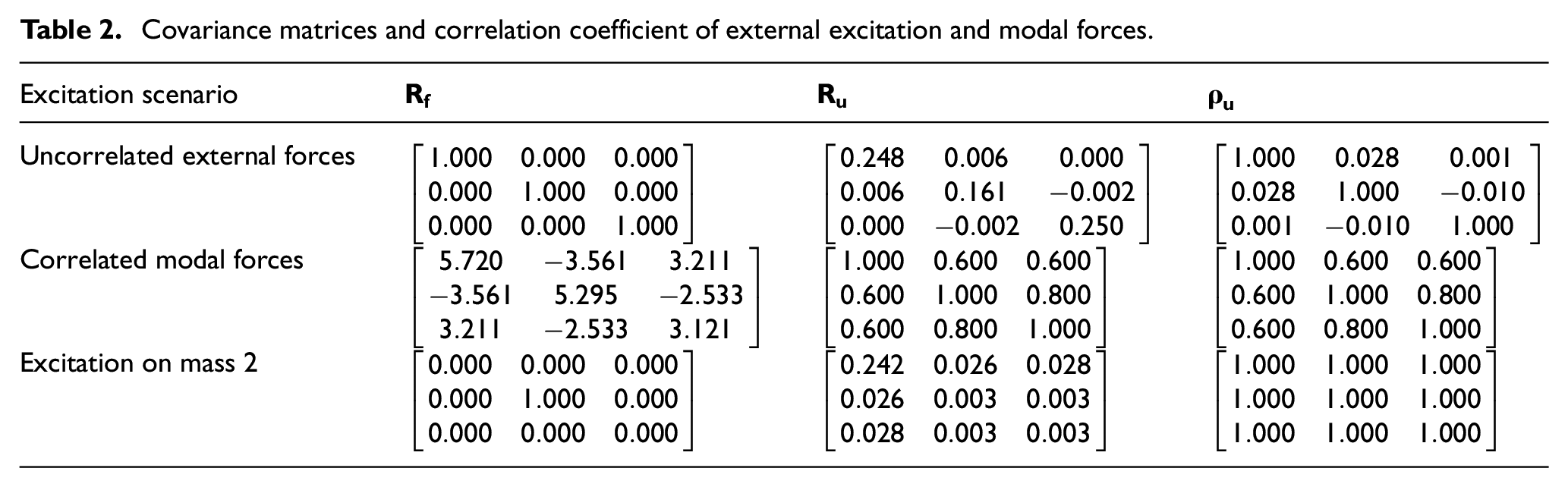
Three different scenarios of excitation forces are considered. Firstly, the system is excited at all masses by uncorrelated white noises with
Covariance matrices and correlation coefficient of external excitation and modal forces.
Correlation coefficient matrix of modal coordinate displacement.
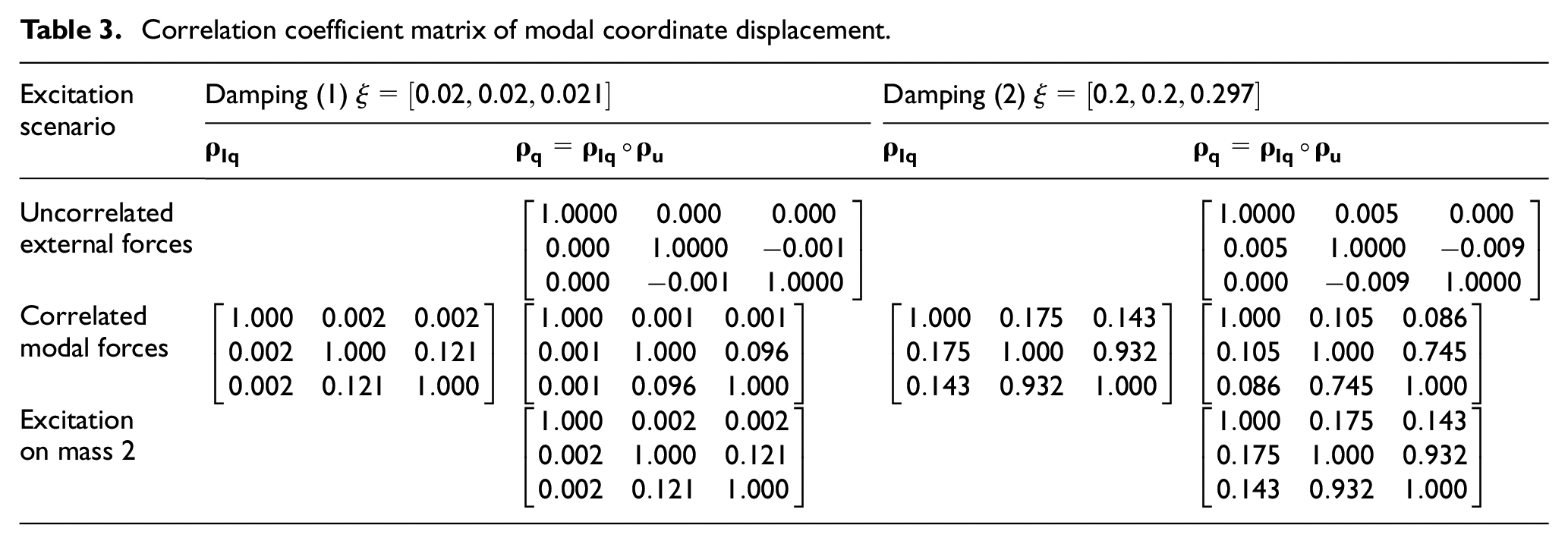
Secondly, the modal forces are considered to be correlated white noises with specific covariance matrix
The last excitation arrangement is to excite the system with external force (white noise) only applied to one of the masses (mass #2). The corresponding covariance and correlation matrices are listed in Tables 2 and 3. It is shown that the modal forces are completely correlated, and the correlation of the modal coordinate responses can not be ignored, for example,
All these excitations are generated at 100 Hz and the total sampling time is 10,000 s. The response signals are recorded to form ensemble matrices
MAC matrix of the modal matrix estimated by the SOD method and the ISOD method.

For the lightly damped case,
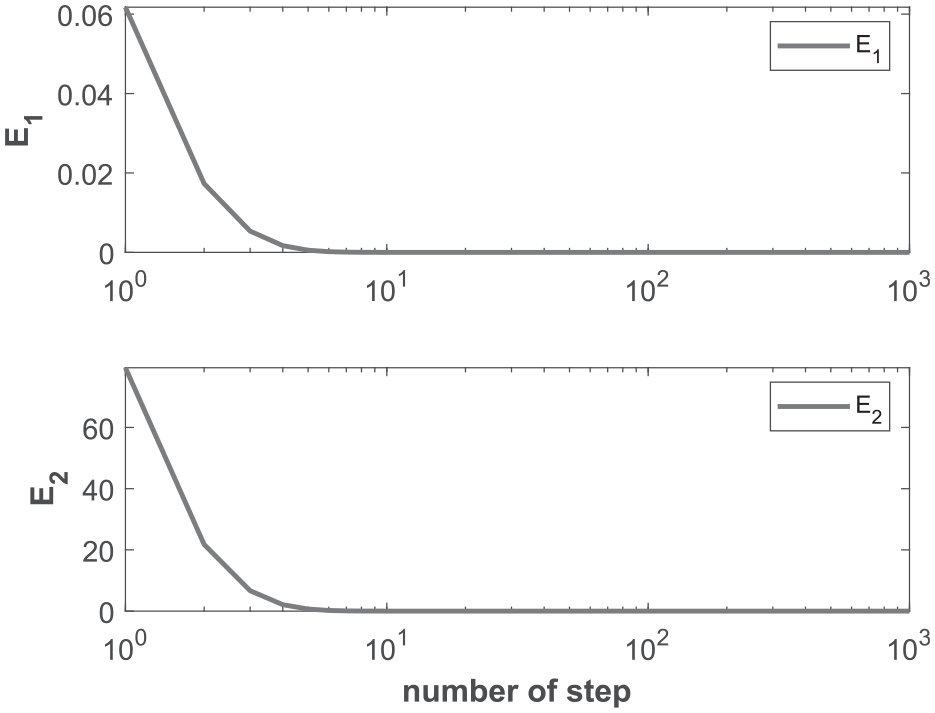
Convergence of the index
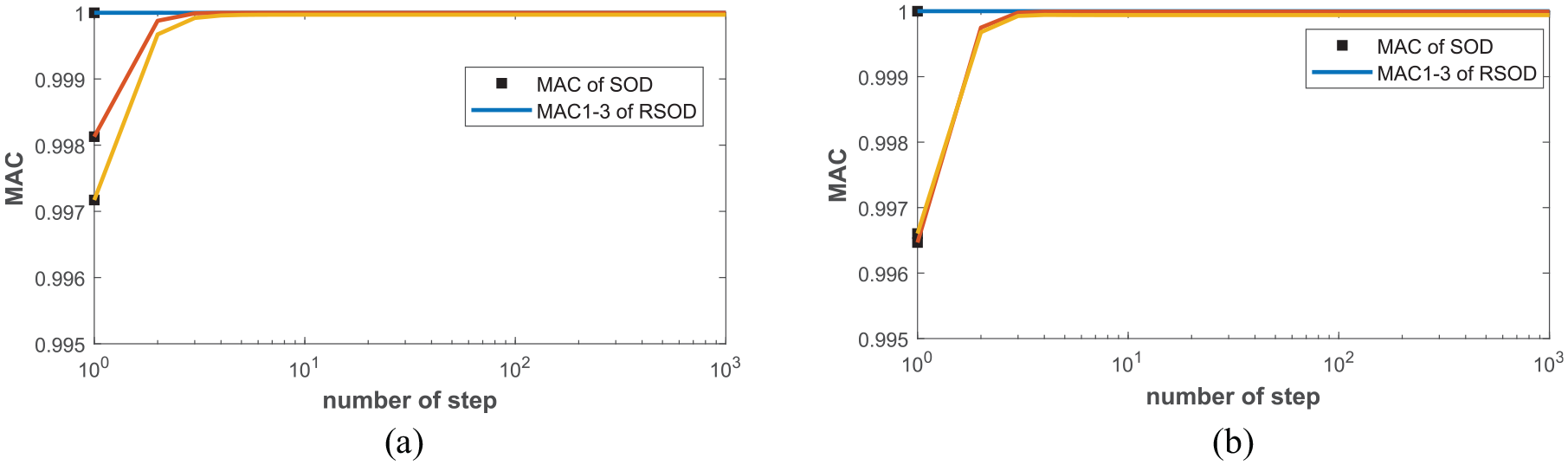
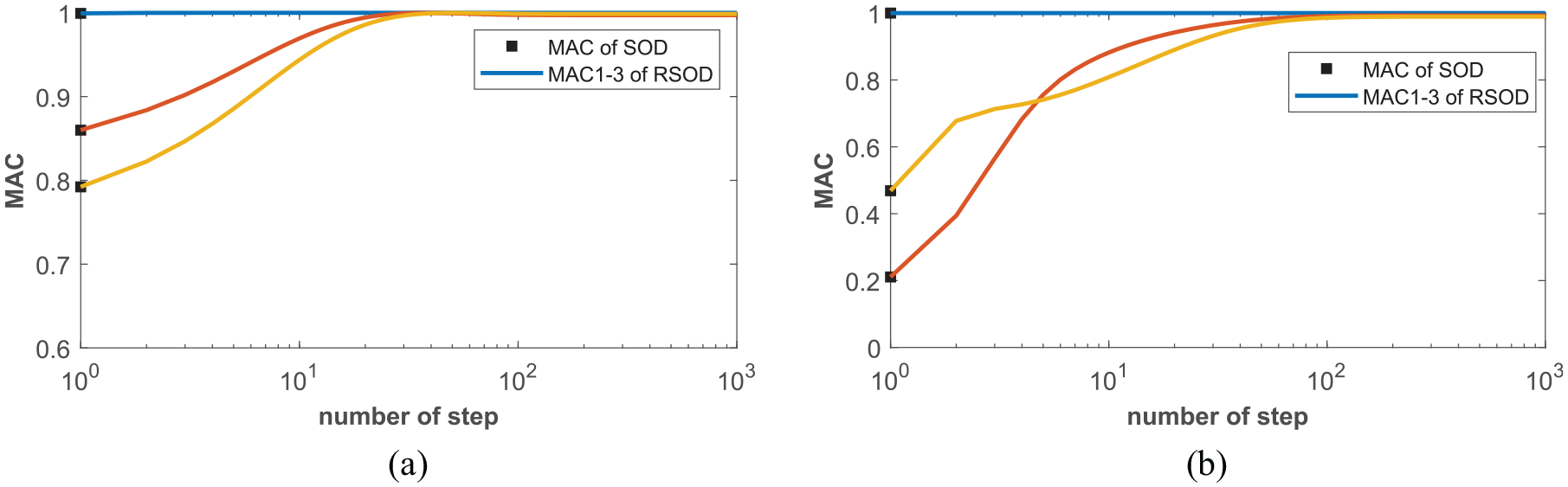
MAC of the mode shape vectors updated by the ISOD method for the lightly damped case with: (a) correlated modal forces, and (b) excitation applied on mass #2.
For the moderately damped case, the SOD method provides inaccurate results due to the correlation of modal responses (when modal forces are correlated or completely correlated). When correlated modal forces are applied, the diagonal elements of the MAC of the modal matrix estimated by the SOD method are (0.9993, 0.8547, 0.7985). This indicates that the mode shape vectors of the second and the third mode given by the SOD method are inaccurate. This is because these two modes are coupled modes and the corresponding modal coordinate responses are correlated with each other, for example,
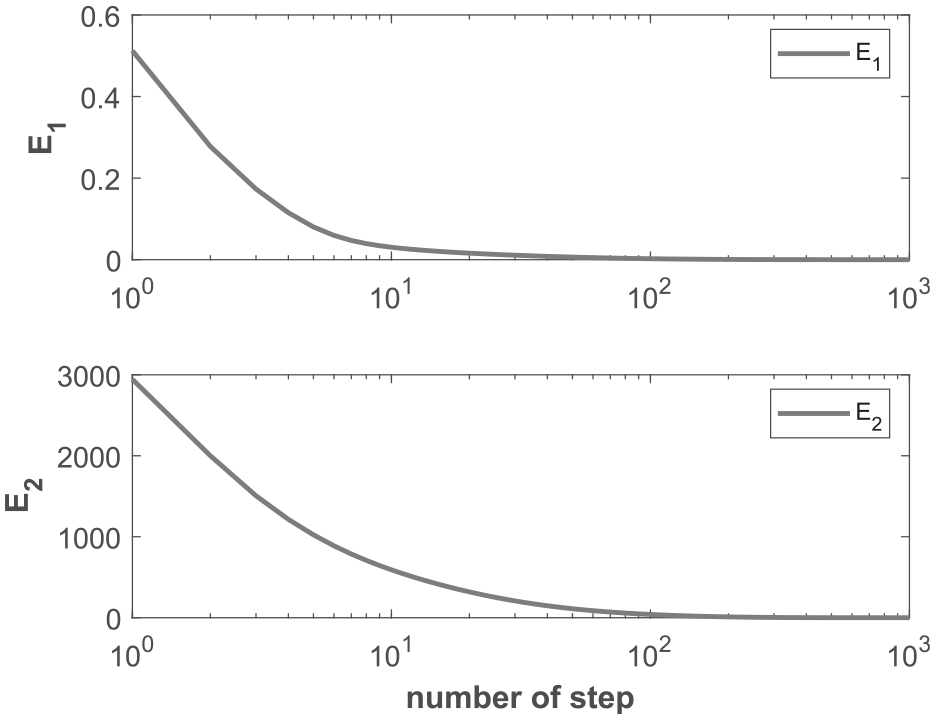
Convergence of the index
MAC of the mode shape vectors updated by the ISOD method for the moderately damped case with: (a) correlated modal forces, and (b) excitation applied on mass #2.
Essentially, the ISOD algorithm is a local optimal method, and the accuracy of the initial modal matrix is important for the convergence. Consider the step numbers of the above cases, it is concluded that the closer the initial modal matrix is to the true value, the faster the convergence speed of the ISOD method. The mathematical mechanism of the convergence characteristic needs further study. However, since the modal forces in the practical structures are usually not completely correlated, even for the moderately damped case, the SOD method can provide an initial modal matrix with adequate accuracy.
To further investigate the properties of the ISOD method, three sets of Monte-Carlo Simulations are performed. Considering the moderately damped case, for each excitation scenario, the vibration system is excited 1000 times. The SOD method and ISOD method are invoked to obtain a set of estimations of the modal parameters. Then the mean values and the root mean square error (RMSE) of these parameters are computed to obtain their statistical characteristic. The results are shown in Table 5. The SOD method gives accurate results when uncorrelated external excitations are applied. The difference between the identified frequencies and the true value is very small. The RMSE of the results from the SOD method is also small, which illustrates that the uncertainties of the identified parameters are also small. In fact, the RMSE is related to the sampling length, it will decrease as the data become longer.
Accuracy of the frequency and damping ratio of the SOD method and the ISOD method for the damping case (2).
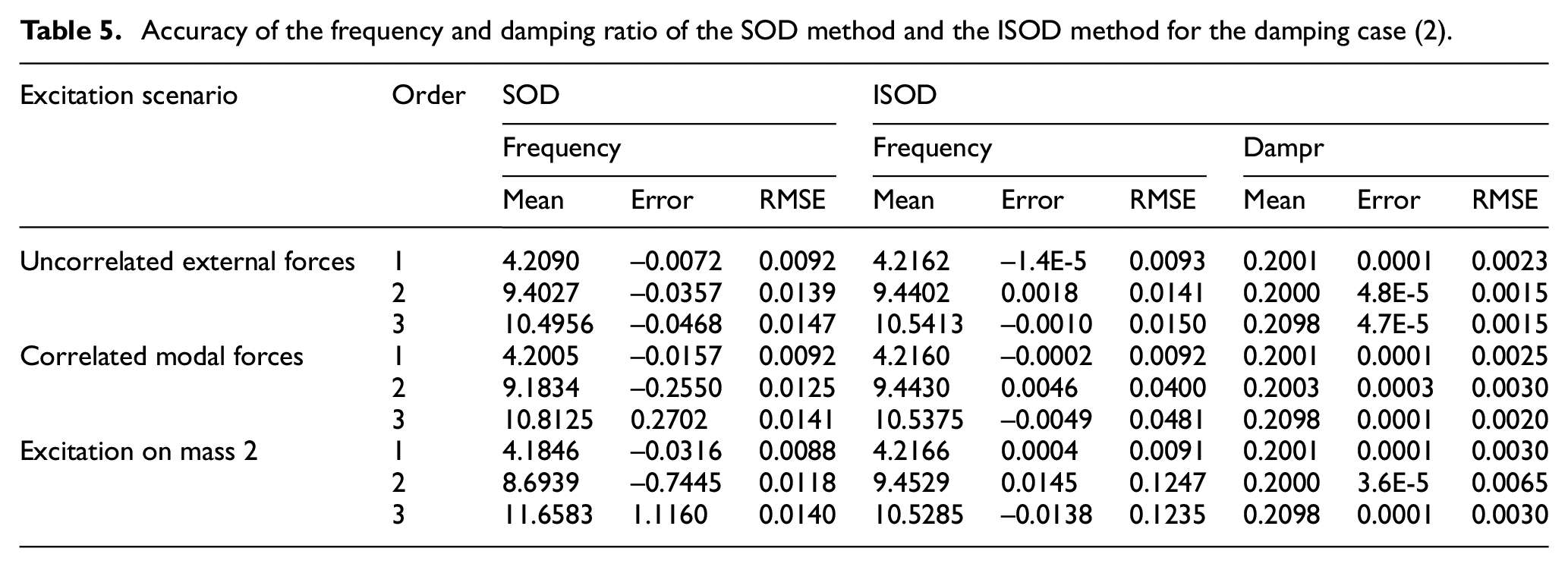
For the correlated modal forces, however, obvious deviations appear in the mean values of frequencies obtains by the SOD method. The deviation of the third frequency reaches 0.2702 rad/s. This indicates that the SOD method provides a biased estimation of the modal parameters. The SOD method provides worse frequency estimations for the system with excitation on mass 2 only, the deviation of the third frequency reaches 1.1160 rad/s. It again demonstrates that the accuracy of the SOD method is affected by the correlation of the modal coordinate responses, which is influenced by the correlation of the modal forces. The accuracy of the modal frequencies obtained by the ISOD method is remarkably improved. The mean values of the damping ratios are also close to the true value. The differences between the RMSEs for different excitation scenarios show that the parameters can be identified with different accuracy. The modal parameters of the system excited by uncorrelated external forces can be identified with the best accuracy.
Experimental verification
To further verify the performance of the proposed approach presented in this paper, the vibration data of a seven-story frame structure model is analyzed in this section. The total height of the structural model is 2.1 m, and each floor is 0.3 m. The steel mass blocks are set on each floor to simulate floor weights. The detailed information on this model can be found in (Li et al., 2012) and the layout of the sensors used in this paper is shown in Figure 11. Seven acceleration sensors are installed on the frame model, and the sampling frequency is set as 2000 Hz. In this study, the test signal is low-pass filtered, and the signal below 50 Hz is retained. The total duration of the signal used for modal parameter identification is 500 s.
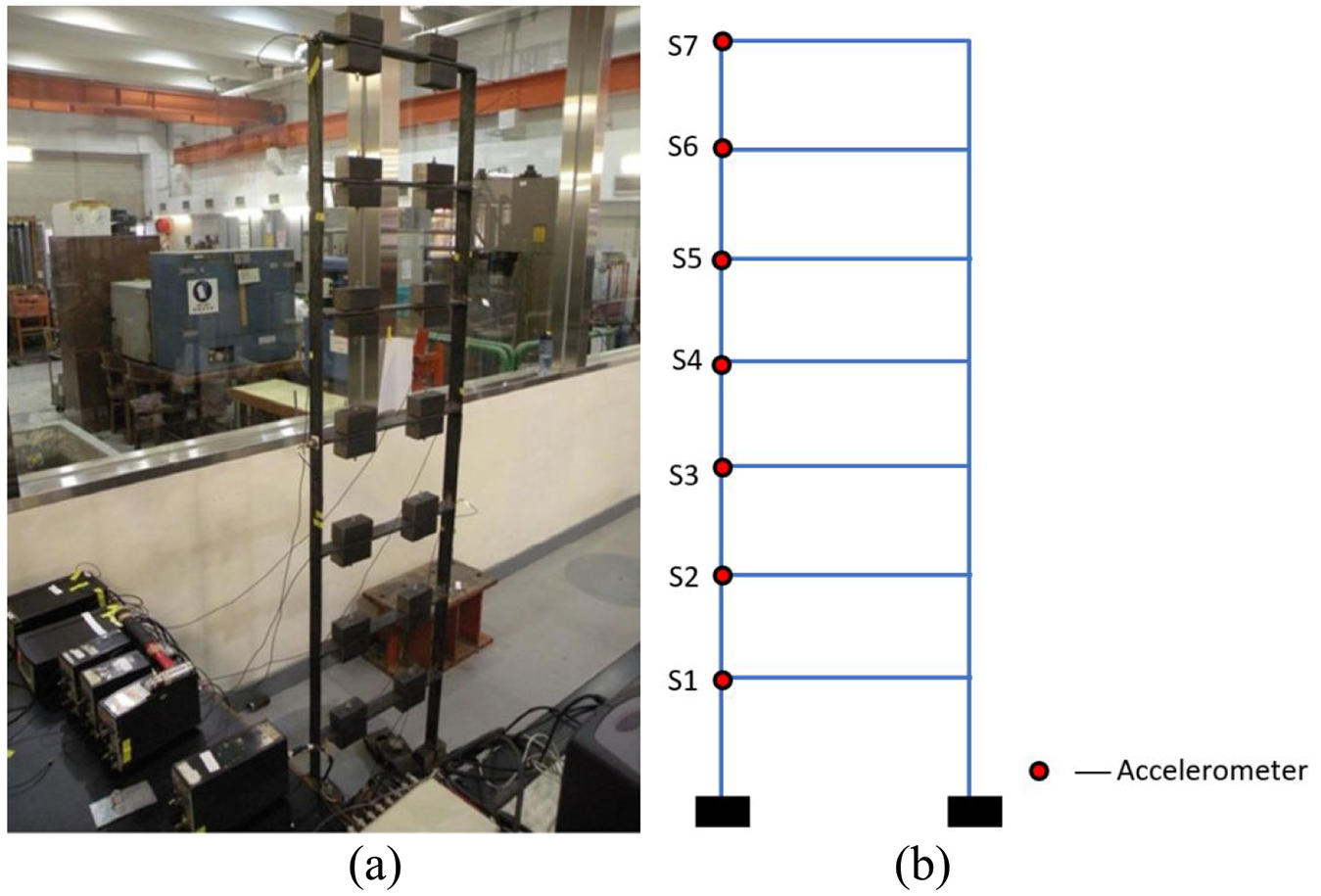
(a) The laboratory frame structure modal, and (b) the layout of the sensors.
The test data are fed in the stochastic subspace algorithm (SSI) and the proposed approach in this paper, and two sets of modal identification results are obtained. Figure 12(a) shows the MAC of the mode shapes identified by using SSI and the proposed ISOD. By comparison, the two sets of mode shapes are very close. It can be observed that the results of the first seven modes obtained by these two methods have a good match. These mode shapes identified by the two methods are shown in Figure 12(b), further verifying the accuracy of using the proposed approach for modal identification.
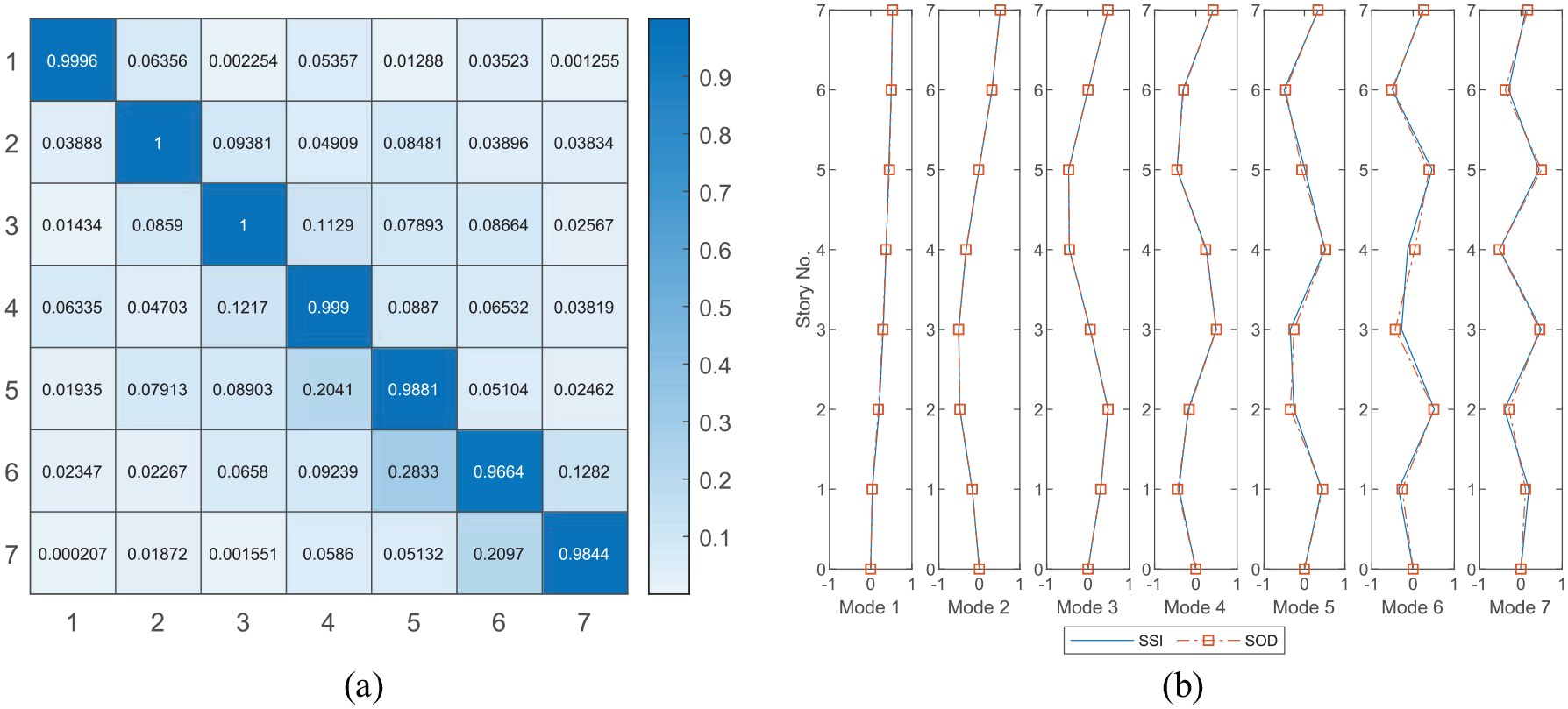
Comparison of the mode shape results obtained by using SSI and the proposed approach: (a) the MAC value, and (b) the mode shape plots.
Based on mode shape results, we can further understand the theory of frequency and damping identification in this paper. Using
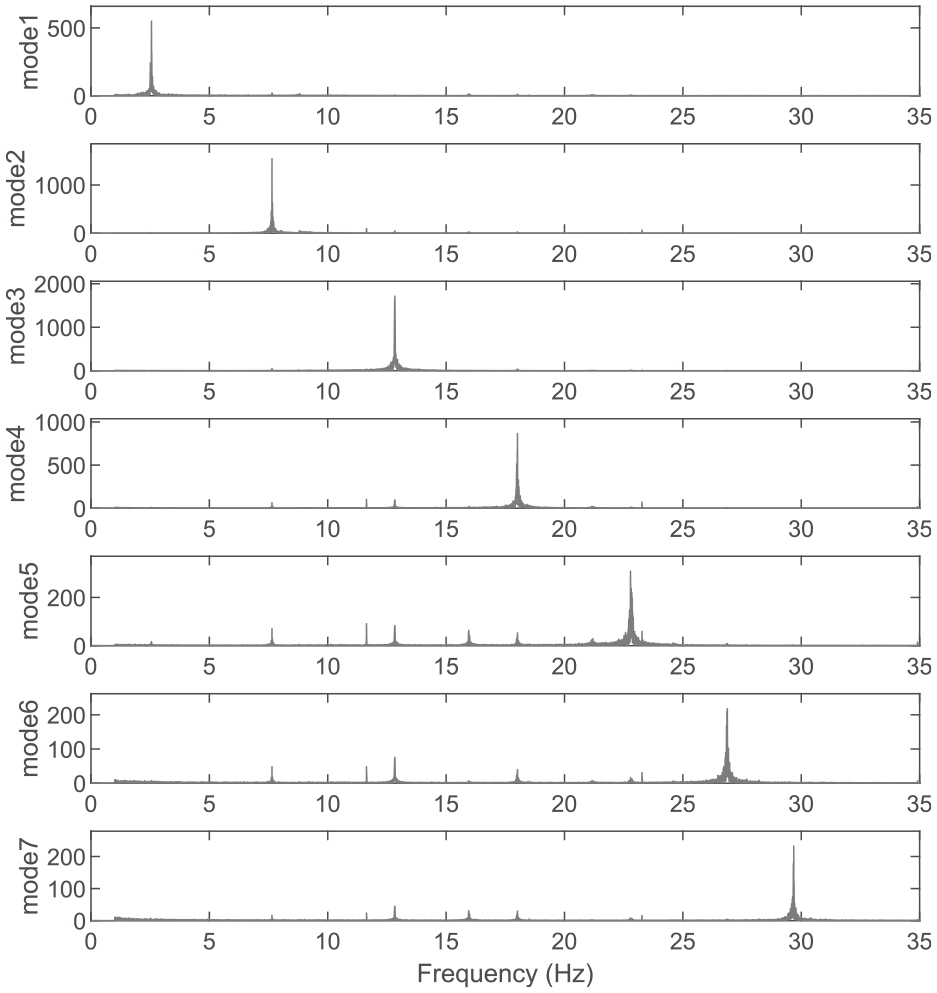
The Fourier spectrum of the decomposed modal coordinate vibrating signals.
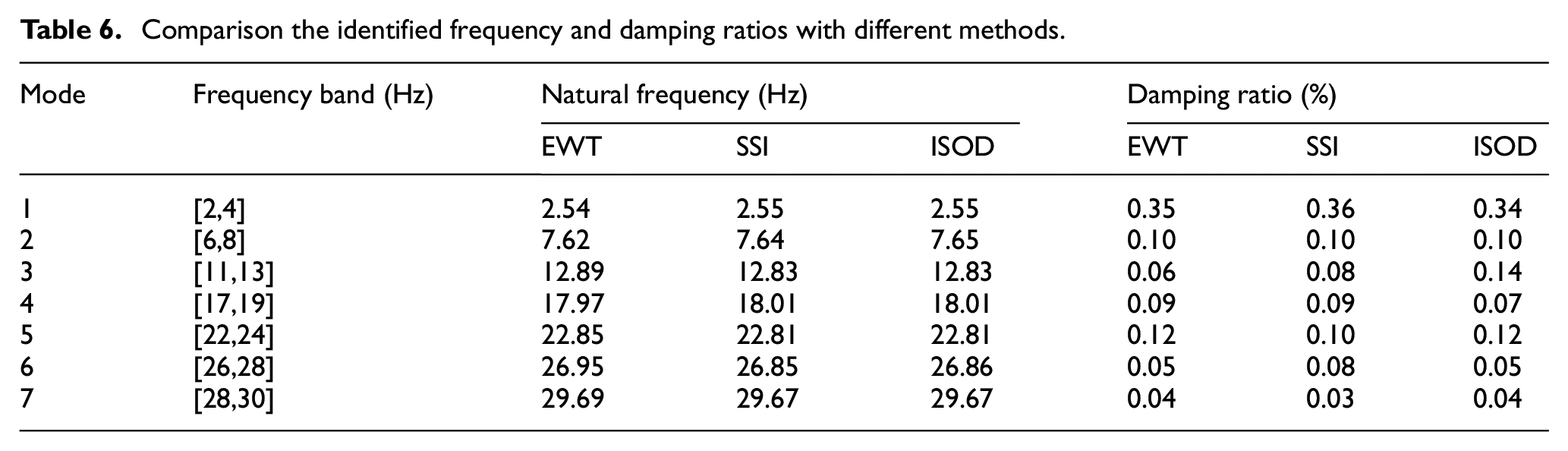
Comparison the identified frequency and damping ratios with different methods.
Conclusion
This study stems from the investigation of the SOD method for modal identification of damped vibration systems. It is stated in this paper that the SOD method can be regarded as a specific version of the generalized complexity pursuit method. Since the sources of the damped vibration system, that is, the modal coordinate responses, are not completely uncorrelated due to the existence of the damping, which leads to the identification error of the SOD method. The influence of the damping to the correlation characteristic of the modal coordinate responses is researched. And a set of analytical formulas is given, which enables us to calculate the expected covariance matrix of modal responses. Based on the analytical formulas, the ISOD method is proposed and identifies the mode shapes, natural frequency, and the damping ratios of the system iteratively. Numerical examples and experimental studies validate the convergence of using the ISOD method for modal identification, even for cases that the initial modal matrix given by the SOD method contains remarkable errors. The ISOD method provides more accurate results than the SOD method when convergence is assured, it can be regarded as an improved version of the original SOD method.
Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work described in this paper is supported by the National Natural Science Foundation of China (Project no. 51408177 and 51978230), and the Fundamental Research Funds for the Central Universities (PA2019GDZC0094). The financial support is gratefully acknowledged.