
Abstract
An appendage, in the form of a submerged suspended plate (SSP) in a liquid-containing deep tank, is proposed for converting functional liquid storage tanks into passive tank dampers for structural vibration mitigation. The oscillating frequency of the SSP is designed to be tuned to the structural frequency so that the tank damper is independent of detuning effects that could be caused by liquid level fluctuations. Further, the impulsive, rather than the sloshing, liquid mass is utilized here. This alleviates the disadvantage of low energy dissipation associated with the relatively smaller proportion of sloshing liquid mass of a deep tank. The theoretical model and working mechanism of the deep tank damper with submerged suspended plate (DTD-SSP) are developed and the expression for the tuning frequency derived. A time-domain formulation for the structure-DTD-SSP system is presented and the design and effectiveness of the DTD-SSP for an example structure under base excitation examined. Further, the performance sensitivity to tuning ratio and comparison with the traditional tuned mass damper (TMD) are presented. Results indicate that with the proposed design, liquid storage tanks installed for other functional requirements can be converted into DTD-SSPs that can achieve significant response reductions comparable with that of TMDs.
Keywords
Introduction
The effectiveness of the dynamic vibration absorber (DVA) to enhance structural performance under environmental loading is well-established. A DVA consists of a secondary mass with resilient and dissipative elements and is designed so that its natural frequency is tuned, that is, maintained close to the frequency of the structural mode to be controlled. Depending on the basic constitution, DVAs are divided into two categories, namely, (a) the tuned mass damper (TMD), and (b) the tuned liquid damper (TLD).
In the TMD, typically, the secondary mass is a solid one that is connected to the primary structure through external spring and damping elements. The TMD has its root in the Fraham’s absorber, developed in the early 20th century (Frahm, 1911). Ormondroyd and Den Hartog (1928) and Den Hartog (1947) are credited with the development of the theoretical background of the TMD. However, the study on the use of the TMD in civil engineering structures commenced in the 1970s (McNamara, 1977). Over the years, the TMD has established itself as an effective vibration control device and there are several real-life implementations of the device (Soto and Adeli, 2013). The potential of TMDs to mitigate structural vibrations induced by strong wind (Elias et al., 2019; Wang et al., 2020; Zhang, 2022), as well as earthquake (Zhao et al., 2018; Shu et al., 2019; Zhang et al., 2022) is well demonstrated. In recent years, to improve performance and applicability, several variations of the conventional TMD have been developed, such as the particle TMD (Lu et al., 2017), the tuned impact damper (Lu et al., 2018), the pendulum-type TMD (Shu et al., 2019), the inerter-assisted TMD (Patsialis et al., 2021), etc.
The term TLD stands for the class of DVAs, in which liquid, partly or fully, constitutes the inertial mass of the damper and also contributes to the damping mechanism. Over the last three decades, the TLD has emerged as one of the most attractive passive devices to suppress structural vibrations, with low-cost involvement, easy operation, and amenability to design modifications. Further, the TLD can be incorporated easily into new or existing structures and requires minimal maintenance. The applicability of the device in controlling wind-induced structural vibrations is well established (Kareem, 1990; Konar and Ghosh, 2021c, 2022b; Modi and Seto, 1997; Shankar and Balendra, 2002; Zhang et al., 2016). The effectiveness of the tank dampers in seismic vibration control of structures has also been reported by many researchers (Banerji et al., 2000; Das et al., 2022; Jin et al., 2007; Kareem and Sun, 1987; Lotfollahi-Yaghin et al., 2016; Pandit and Biswal, 2020).
Despite the development of several different configurations of the TLD, it is conventionally associated with the tank damper, in which liquid resides in a circular or rectangular vessel, though other shapes have also been used. Tank dampers are chiefly of three types; (a) shallow tank damper, (b) intermediate-depth tank damper, and (c) deep tank damper (DTD) (Konar and Ghosh, 2022a). This classification is based on the type of sloshing wave produced by the liquid within the tank when laterally excited. Shallow liquid level in a tank induces travelling sloshing waves, whereas deep liquid level in a tank causes standing sloshing waves in the fundamental mode. In the intermediate-depth tank damper, transitional waves are generated during lateral vibration. For practical purposes, the differentiation between the three types of tank dampers is made based on the ratio of liquid depth to the tank dimension along the direction of wave propagation. This ratio is restricted to within 0.1 for shallow tank dampers and is higher than 0.5 for DTDs. The ratio lies between 0.1 and 0.5 for intermediate-depth tank dampers.
Most of the studies on tank dampers have dealt with shallow tanks as deep tanks inherently have much lower energy dissipation capacity (Konar and Ghosh, 2022d). Some efforts have been directed toward enhancing the energy dissipation capacity of DTDs through the incorporation of additional flow damping devices such as baffles, screens, nets, etc., within the damper liquid (Konar and Ghosh, 2021c). Kaneko and Yoshida (1999) studied a DTD with a submerged net across the length of the tank for suppressing structural vibration. Anderson et al. (2000a, 2000b) investigated a DTD with horizontal baffles, placed close to the free liquid surface, to control transient vibrations of a single-degree-of-freedom (SDOF) system. Nguyen et al. (2018) studied a multi-degree-of-freedom structure under seismic excitation with multiple DTDs mounted with slat screens and reported structural displacement response reductions with the requirement of considerably high mass ratios. Recently, Fu et al. (2018) and Xu et al. (2018) proposed a combination of TMD and sloshing damper, in which the TMD is kept submerged within the sloshing liquid, with which it interacts to dissipate energy during vibration.
Civil engineering structures often support liquid (mostly water) containing secondary components such as overhead water tanks on buildings, elevated water tanks, liquid storage tanks on ground supported or offshore platforms, etc. However, despite the success of the TLD as a damping device, these liquid tanks are seldom utilized in the energy dissipation of the primary structure when subjected to lateral excitation. The primary reasons for not using these liquid-containing tanks as damping devices are that these are deep tanks and subject to liquid level fluctuations. Thus, despite being very common engineering structures, there are only very few instances of work that have been devoted to utilizing these deep tanks as damping devices. Hemalatha and Jaya (2008) studied a flexibly supported overhead reservoir on a building, in which the impulsive frequency of the whole tank, and not the liquid sloshing frequency, was tuned to the fundamental frequency of the building for seismic response reduction. Bandyopadhyay et al. (2018) suggested a specific profile of the overhead water tank for which the sloshing frequency of the water within is depth-independent. It may, however, be difficult to procure such non-standard tank shapes for liquid storage purposes. Another technique to have a constant sloshing frequency in an overhead water tank with fluctuating water level was recently developed by Konar and Ghosh (2021b, 2022c) through the concept of a tank damper with a floating base. Rai et al. (2011) demonstrated a case study of seismic retrofitting of a building by compartmentalization of the existing overhead tank to act as shallow tank dampers, along with the installation of additional tank dampers. However, compartmentalization of existing deep tanks to allow them to perform as shallow tank dampers may not always be practically feasible and would disturb the functional utility of the tanks as well. It is also noted that though the incorporation of baffles can help convert standing waves into sloshing waves, they are usually provided near the top of the liquid level and would not serve the purpose when there would be chances of fluctuation in the liquid level in the tank.
In the DTD, a large portion of the liquid is the impulsive liquid, which behaves as though rigidly attached to the tank container during vibration. For example, if a rectangular tank has a height of liquid equal to the tank length, the impulsive liquid mass would be to the tune of 80% of the total liquid (ACI 350.3-06, 2006). The impulsive mass does not engage in the damping mechanism and hence the overall volumetric efficiency of the DTD is low. With this in mind, Konar and Ghosh (2021a) developed the idea of a DTD with a submerged cylindrical pendulum appendage (DTD-CPA). In this, the impulsive mass is energized by the laterally excited pendulum and the drag exerted by the surrounding liquid on the pendulum leads to energy dissipation. However, both the added mass effect from the impulsive mass and the drag effect from the surrounding liquid are limited in case of the DTD-CPA.
The major contribution of the present work is to utilize the basic concept of the DTD-CPA to extract higher energy dissipation from the deep tank, by replacing the cylindrical pendulum of the DTD-CPA with a submerged suspended plate (SSP). The primary advantage of having functional liquid tanks, such as overhead water reservoirs, to be designed as dampers, with allowance for fluctuations in liquid level is retained. The proposed DTD with SSP is henceforth referred to as the DTD-SSP. The DTD-SSP retains all the advantages of the DTD-CPA and further provides higher drag and enhanced added mass. In what follows, first the proposed damper system and its working mechanism are described. The oscillating frequency of the submerged plate in the tank is then derived through free vibration analysis. The theoretical formulation is validated through a comparison with experimental results available in literature. Next, the equations of motion of a laterally excited SDOF structural system with DTD-SSP are derived. The design and performance of the DTD-SSP system in controlling the vibrations of an example building structure under base excitation, through tuning the oscillating frequency of the SSP to that of the primary structure, are examined through a numerical study. Further, the sensitivity of the damper performance to tuning is investigated and a comparison of the effectiveness of the proposed damper with that of a traditional TMD is presented.
Description and working mechanism of DTD-SSP
Figure 1(a) and (b) depict the model of the proposed DTD-SSP. A rectangular deep tank having internal dimensions (a) Elevation of DTD-SSP; (b) 3-dimensional view of DTD-SSP.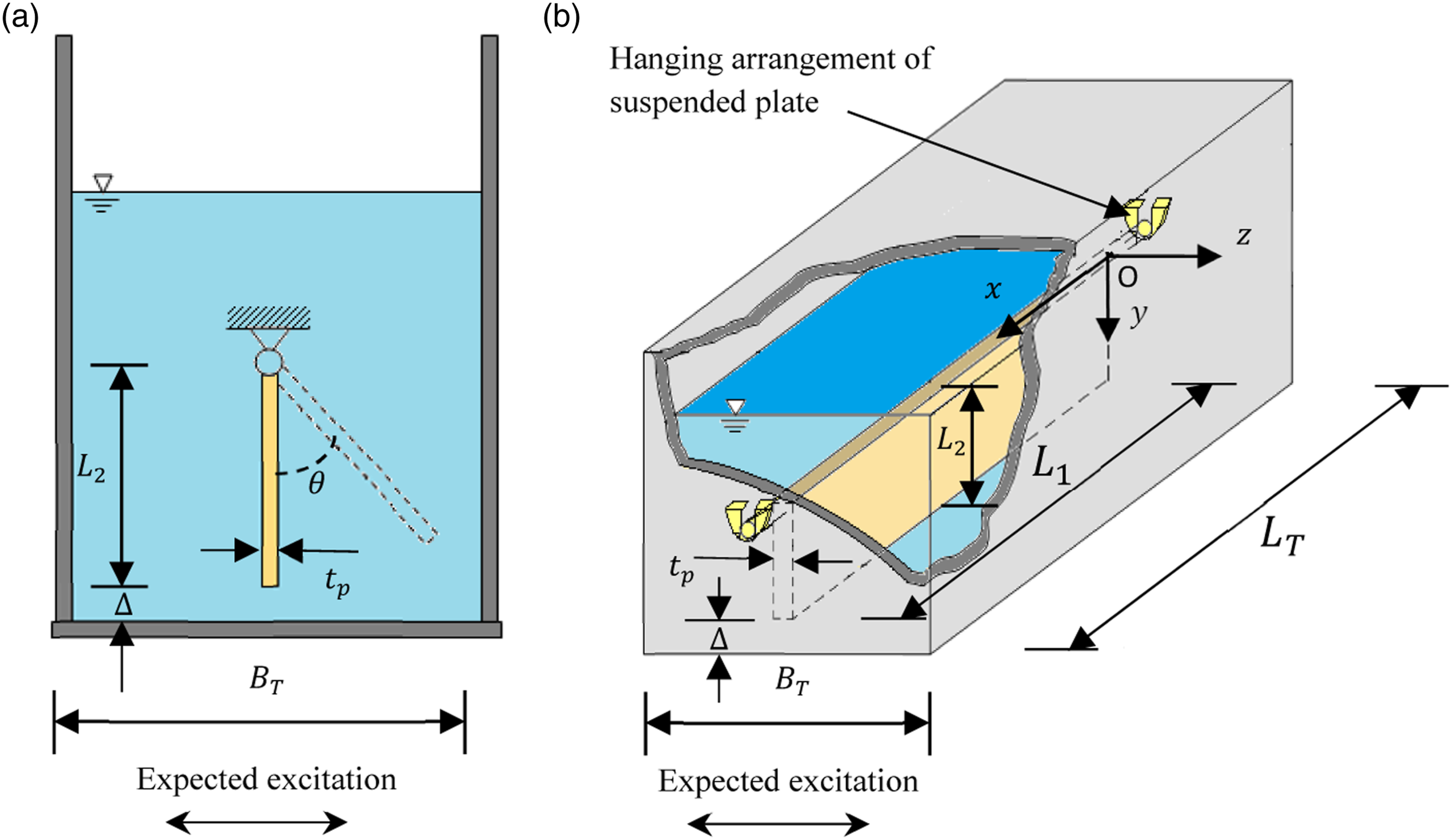
It may be noted that if the plate is placed too close to the bottom of the tank, the added mass would increase due to the blockage effects and this may lead to an overestimation of the frequency of oscillation of the plate. In the case of oscillation of a plate close to a rigid wall, the increase in added mass depends on the ratio
Free vibration of plate in DTD-SSP
Theoretical formulation
The following assumptions are made in the free vibration analysis of the SSP. (i) The thickness of the suspended plate is uniform. (ii) The mass of the suspended plate per unit volume is constant all over the plate. (iii) The suspended plate is rigid and is placed perpendicular to the direction of the anticipated lateral load. (iv) The suspended plate is able to oscillate freely when subjected to external excitations. (v) The fluid in the tank is incompressible and the tank container is rigid. (vi) The suspended plate remains fully submerged in the tank liquid during vibration.
The equation of dynamic equilibrium of the oscillating plate is expressed as follows.

Here,
The effect of the liquid on the oscillation of the submerged plate is taken care of through the consideration of an added inertial mass and drag force.
The effective mass of the oscillating plate may thus be taken to be

Here,
Hence,

To determine the net torque acting on the system, an element of the oscillating SSP of infinitesimal height, (a) Enlarged view of the oscillating suspended plate; (b) An infinitesimal element of the oscillating suspended plate.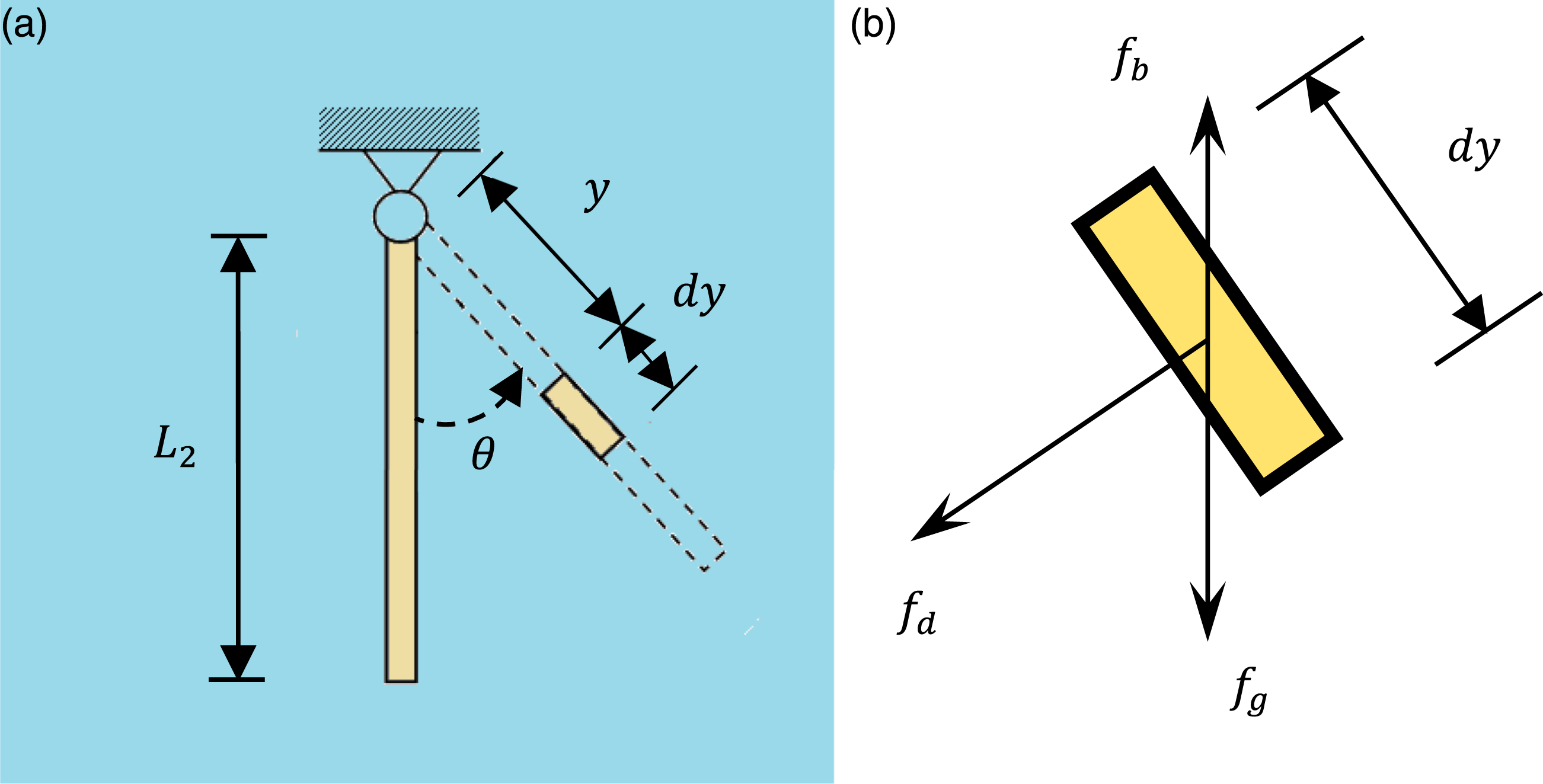
The gravitational force acting on the element is given by

The buoyant force acting on the element is represented by

Here,
Now, in case of a fixed plate submerged in fluid of mass density,

In the present case, the SSP is oscillating within the impulsive or dead liquid mass of the tank. The oscillation of the plate is opposed by the liquid through drag. Hence, equation (6) for the plate element in Figure 2(b) may be written as (Nakayama and Boucher, 1999),

Here
The net torque acting on the plate may be expressed as

Substitution of equations (4), (5), and (7) in equation (8) and the assumption of a constant drag coefficient,

For a rectangular plate the added inertial mass is given by (Dong, 1978)

Here,
Now, on using equations (3), (9), and (10), equation (1) can be written as,

Let consider

Now, equation (11) may be recast as

Here,

For the purpose of design of the damper, this linearized frequency of the SSP given in equation (14) would be used for tuning to the structural frequency. However, during evaluation of the performance of the damper, the nonlinear equation given in equation (13) would be used.
Validation of theoretical formulation
Comparison between theoretical and experimental results regarding reduction in plate frequency in submerged condition as compared to that in vacuum for different plate aspect ratios.
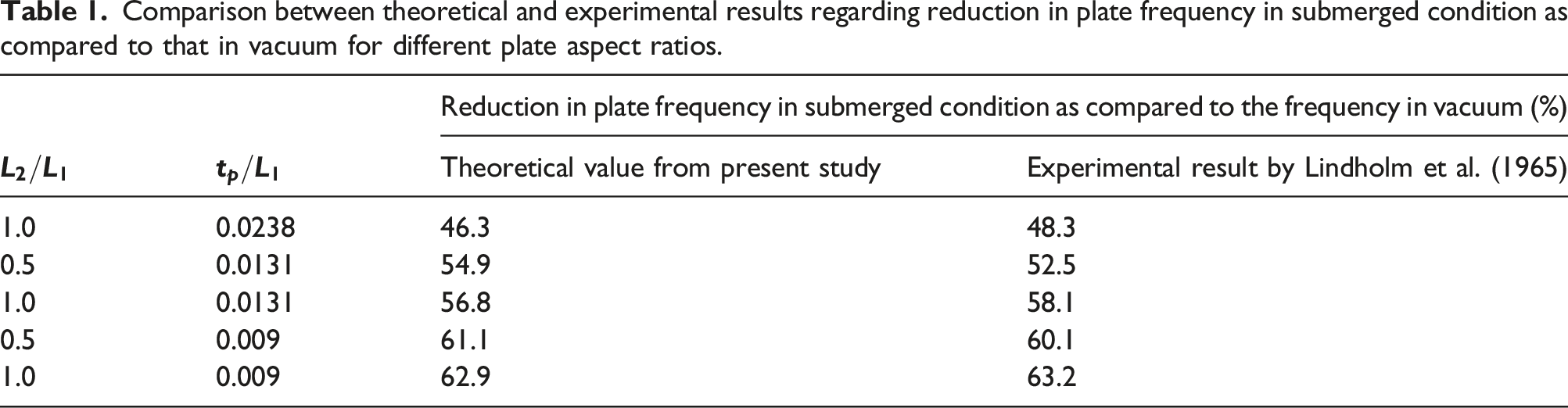
Further, the approach adopted in the present study to cater to the effect of the presence of the surrounding liquid on the free vibration characteristics of the submerged plate is similar to that used by Mathai et al. (2019) in their study on the motion of a cylindrical pendulum submerged in liquid. Through extensive studies, they have reported good agreement between the natural frequency of oscillation as determined from free vibration experiments and from theoretical analysis. It is thus expected that the actual behavior of the present system may be well represented by the mathematical model given by equations (13) and (14).
The assessment of the drag coefficient,
Equations of motion of laterally excited SDOF structure with DTD-SSP
The DTD-SSP system described in the foregoing section is considered to be rigidly attached to an SDOF structural system and subjected to lateral excitation (see Figure 3). The mass, stiffness, and damping of the SDOF system are Model of structure with DTD-SSP.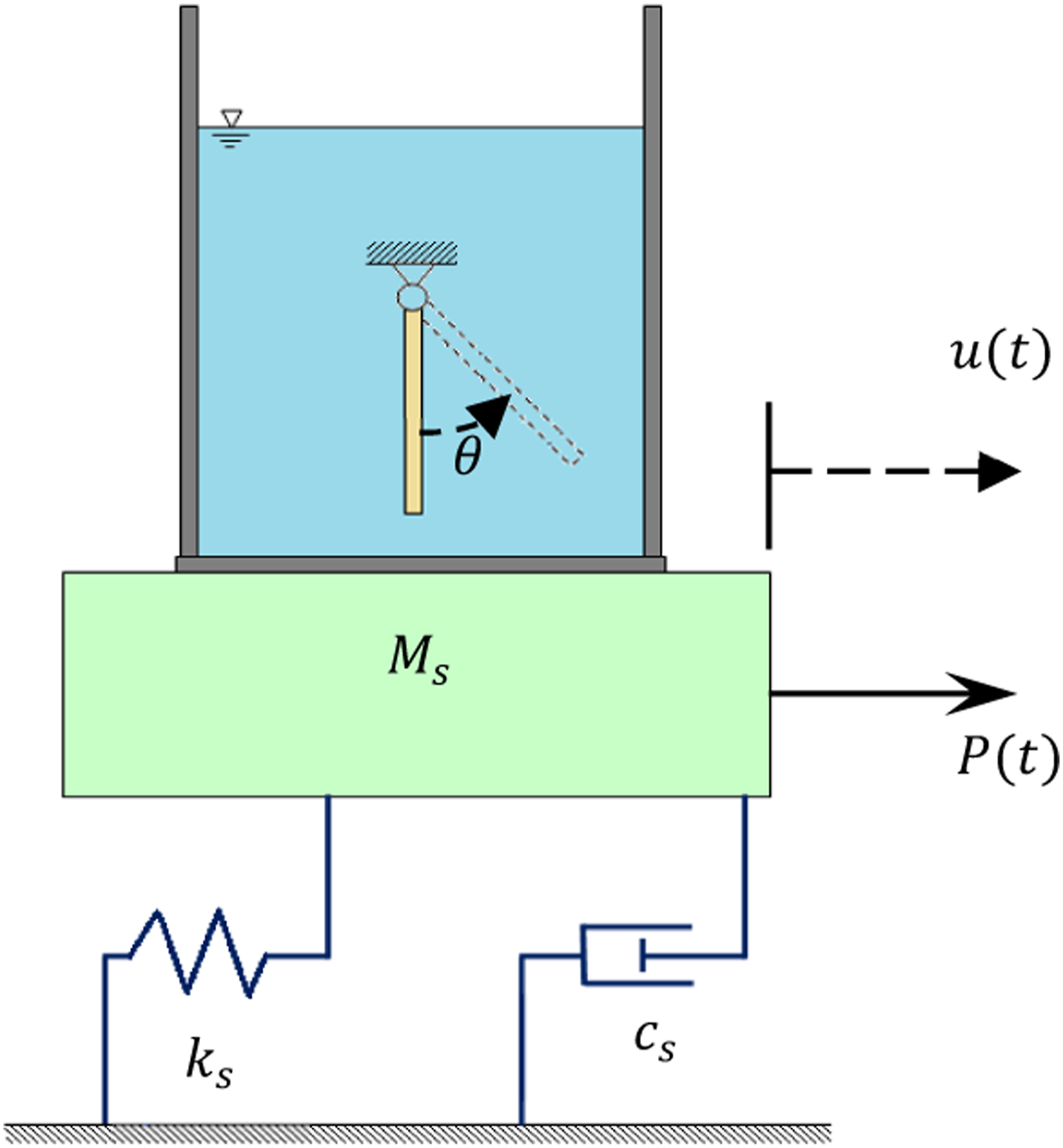
The kinetic energy of the structure-DTD-SSP system is given by
Equation (15) can be simplified as
Now, the potential energy of the system is expressed as
On simplification of equation (17), the following is obtained.
Hence, the Lagrangian of the system may be written as
For a non-conservative system such as the present one, Lagrange’s equation may be written as follows (Minguzzi, 2015).
Here,
For the structure-damper system, the generalized coordinates are
In this system, the external force and the damping forces are the non-conservative forces. Using the principle of virtual work, the non-conservative generalized force corresponding to the 


Now, the equations of dynamic equilibrium of the structure-DTD-SSP system may be obtained from

Substitution of equations (16), (19), and (22) in equation (25) leads to
Let
Normalizing equation (27) with respect to 
Here,
Again, on substitution of equations (16), (19), and (24) in equation (26), the following is obtained.
Rearranging terms in equation (29) leads to
The coupled equations, (28) and (30), govern the motion of the structure-DTD-SSP system.
Instead of an external force, 

Numerical study
Example structure and design of DTD-SSP
For the numerical study, an example SDOF structure is considered that has fundamental period (
For the mass ratio 
The value of Height of suspended plate 
For the present design, the liquid within the DTD-SSP is assumed to be water, with mass density,
Parameters of the suspended plates of the designed DTD-SSPs

In the present problem, it is assumed that the tank dimensions are such that the internal length (
In a rectangular tank, the mass of the impulsive liquid, 
Here,
Equation (34) dictates that in order to have the SSP fully submerged within the impulsive liquid mass, the minimum water depth to be maintained in each tank is 1.171 m, which is 43% of the total depth of water in the tank in the tank-full condition. Thus, 57% of the total volume of the water tanks is available for other functional usages.
In the design of the DTD-SSP, the dimensions of the tank should be so chosen that the fundamental sloshing frequency of the liquid in the tank is well away from the natural frequency of the structure, so as to minimize the effect of liquid sloshing on the structural response and on the damper performance. In the present case, the fundamental liquid sloshing frequency is always more than 20% of the natural frequency of the structure, for the permissible range of fluctuation in liquid depth. The fundamental liquid sloshing frequency in rectangular tanks is derived from (Graham and Rodriguez, 1952),
Performance of DTD-SSP under base excitation
Reductions achieved in steady-state displacements response of structure
Response of structure-DTD-SSP system under harmonic base acceleration of amplitude 0.15 m/s2 (a) time histories of displacement of example structure, with and without DTD-SSP system, (b) time history of plate rotation.
It is clear from Table 3 that the performance of the DTD-SSP is dependent on the excitation amplitude and that with the increase in excitation amplitude the response reduction reduces. This is analyzed as follows. In the present system, the control is achieved by the drag force that acts perpendicular to the surface of the oscillation plate. For very high angular displacement of the plate, the horizontal component of the drag force is small. Hence, when the structure-damper system is subjected to large amplitude excitation, the angular displacements of the plate are high, resulting in lower control effectiveness of the damper.
Details of considered earthquake motions.
Reductions achieved in displacement response of structure by DTD-SSP system under earthquake excitation.

The displacement time histories of the uncontrolled and controlled structure subjected to the Northridge earthquake excitation are shown in Figure 6(a). It is observed that during the initial phase of vibration, the effect of the DTD-SSP system is not perceptible, possibly due to the time taken by the SSPs to start to oscillate and mobilize the control force. However, after the initial phase, the effectiveness of the damper is clearly visible. Response of structure-DTD-SSP system under Northridge earthquake excitation (a) time histories of displacement of example structure, with and without DTD-SSP system, (b) time history of plate rotation.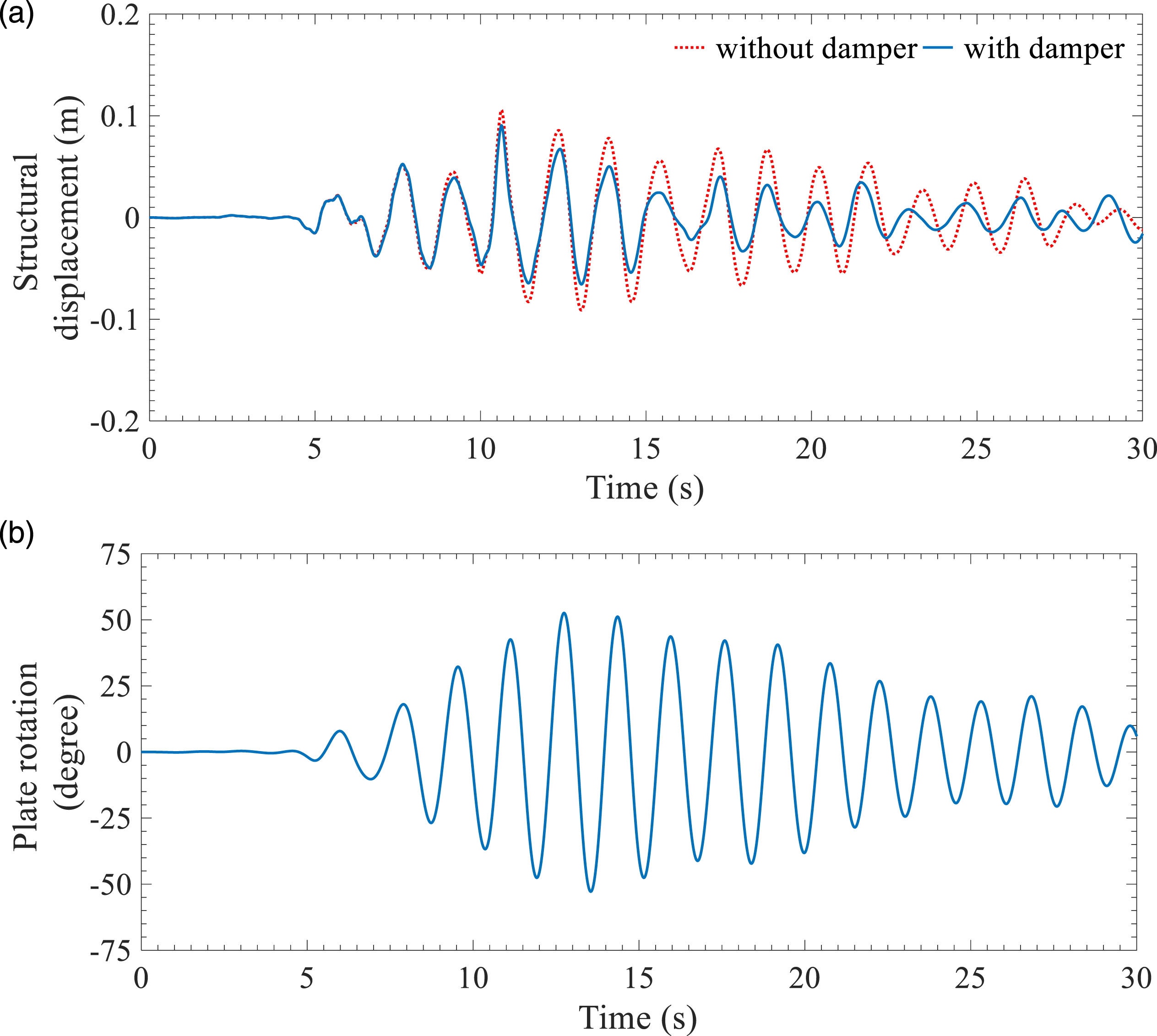
The oscillations of the SSP of the designed dampers are also studied and it is found that under the considered ground motions, the maximum plate rotations are obtained in the range of 47.8o to 72.4o, which are quite significant as the damper dissipates energy through the drag resistance provided by the surrounding liquid on the oscillating plate. It also indicates that a small-angle linear approximation of the plate oscillation would be inappropriate. Representative time history of plate rotation of the proposed dampers for the example structure for the Northridge earthquake is presented in Figure 6(b).
Sensitivity of DTD-SSP to tuning and comparison with traditional TMD
The sensitivity of the DTD-SSP system to tuning is analyzed under harmonic base excitation to the structure. Three different amplitudes ( Percentage reduction in steady-state structural displacement Optimal tuning (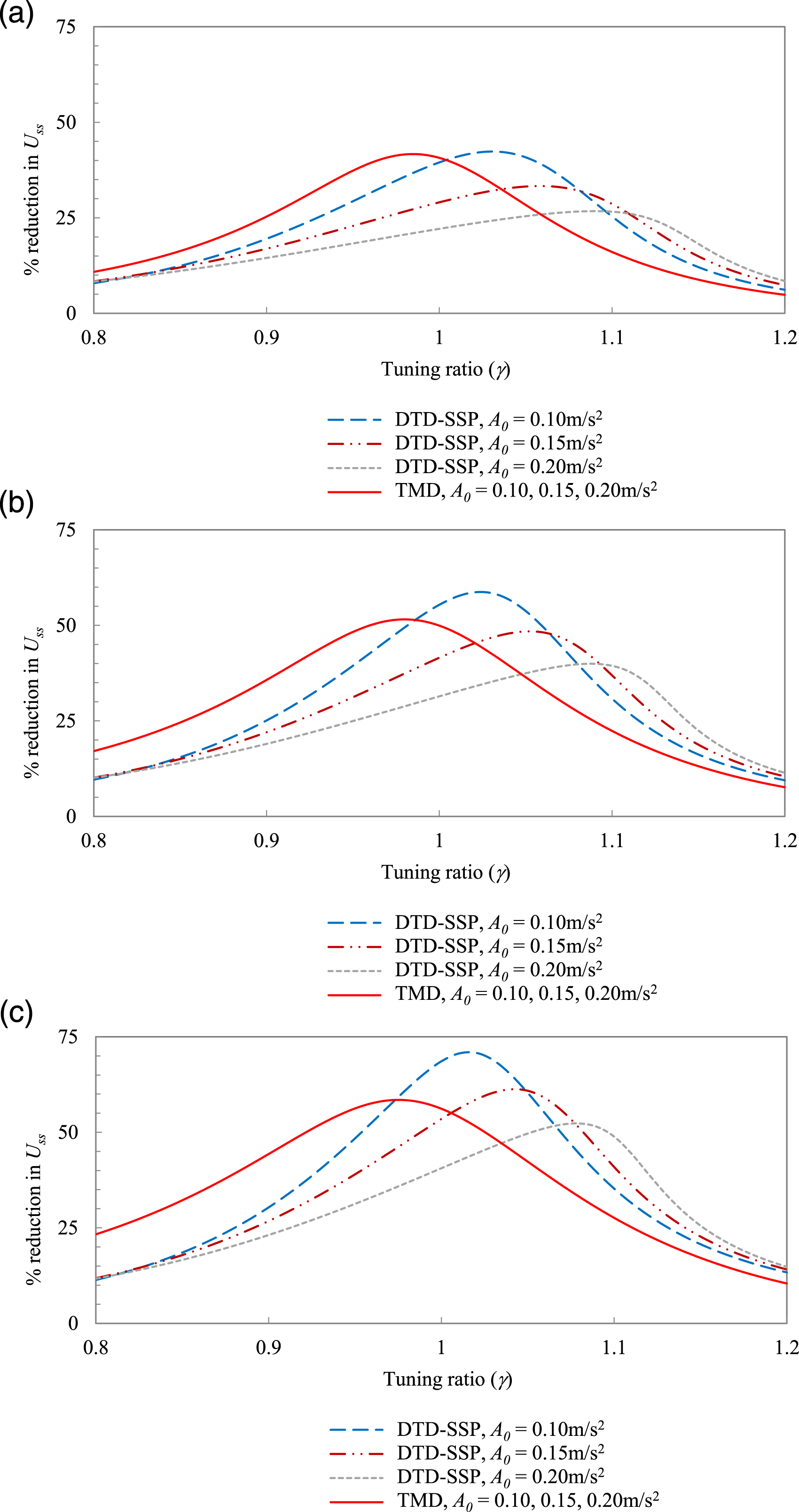
As it would be of interest to compare the performance of the proposed DTD-SSP with that of the well-established TMD, the reductions in 
It is observed that the performance of the DTD-SSP, which is inherently nonlinear, is expectedly dependent on the excitation amplitude and with the increase in excitation amplitude, the maximum reduction in
Overall, the performance of DTD-SSP is found to be comparable and even superior to that of the TMD for low to medium-intensity excitation. Though the effectiveness of the DTD-SSP reduces for higher excitation amplitude, it is still significant. However, with higher mass ratio, the structural response reduction achieved by the DTD-SSP for higher excitation amplitude is close to that achieved by the TMD.
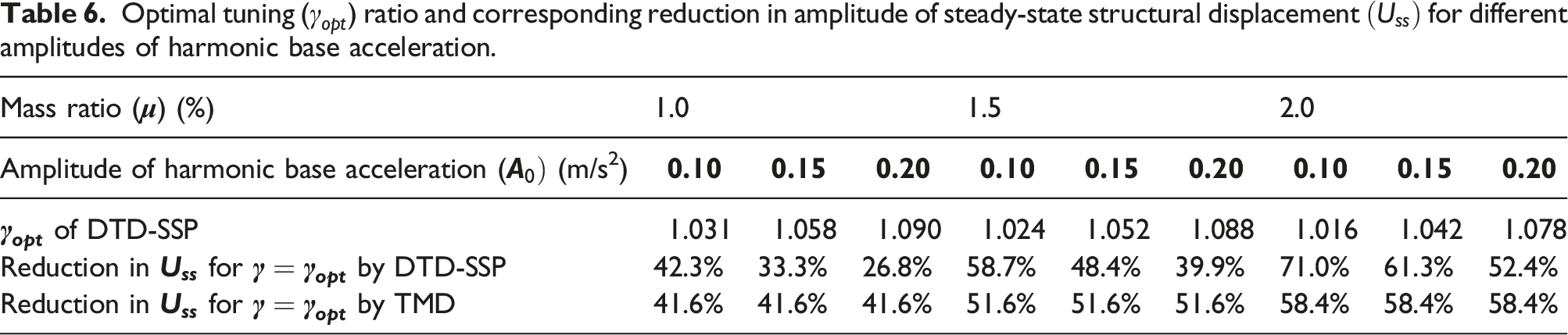
Optimal tuning (

Optimal tuning (

Conclusions
In the proposed device (DTD-SSP), the impulsive liquid mass in the deep tank is energized by the SSP and participates in the energy dissipation mechanism. The oscillating frequency of the SSP is tuned to the fundamental structural frequency. The tank is thereby converted into a viable damping device without disturbing its functionality. Unlike the conventional TMD, the DTD-SSP does not require any spring or damping elements that are costly and require frequent maintenance. Further, it can be incorporated easily into an existing tank with little modification of the original tank structure. Thus, the proposed design is suitable for new construction as well for retrofitting work. The only additional requirement of the proposed damper is to maintain a minimum liquid depth in the tank. This minimum liquid storage can meet the requirement for reserve storage and for firefighting. The major findings of the study are summarized below. (1) A good agreement of the theoretically obtained reduction in the plate frequency in a submerged condition with respect to the plate frequency in vacuum with experimental results available in literature (Lindholm et al., 1965) provides a validation of the proposed formulation. (2) The performance of the DTD-SSP is dependent both on the amplitude of the excitation as well as on the mass ratio. For harmonic base acceleration input of different amplitudes, an optimally tuned DTD-SSP can achieve significant response reductions in the range 26%–71.0% with mass ratio as low as 1%–2%. The efficiency of the DTD-SSP is higher for lower amplitude excitations. (3) The optimal tuning ratio is close to unity, and depends both on the mass ratio as well as on the input excitation amplitude. (4) For a given mass ratio, the required tuning frequency of the DTD-SSP can be achieved for a range of plate dimensions and density of plate material. This brings flexibility to the design of the proposed damper. (5) Under the considered seismic base excitations, the DTD-SSP is able to achieve 13%–18% and 20%–31% reductions in the peak and rms displacement of the structure respectively. (6) Under both harmonic and seismic base excitations, the performances of the proposed damper are found to be comparable and, in some instances, even superior to that of the traditional TMD.
Overall, the proposed damper design is believed to have significant potential in the utilization of functional liquid tanks in the mitigation of structural response to lateral excitation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.