
Abstract
To rapidly and effectively assess the bridge seismic-resistant capability, it is essential to conduct efficient predictions of bridge seismic responses. Recently, physics informed neural network (PINN) has made great progress and utilized to solve differential equations in different fields. However, how to increase its accuracy and efficiency still remains an open challenge. In this work, a novel gradient-enhanced Fourth-Order Runge-Kutta PINN (gRK4-PINN), as a powerful hybrid PINN, is utilized to achieve this goal. As for gRK4-PINN, the physical information is not simply embedded into the loss function; instead, the RK4 method and the physical model is intricately integrated with the neural network. In addition, to improve the predictive performance, additional gradient equation is directly embedded in loss function. A large-span continuous girder high speed railway (CGHSR) bridge is adopted as numerical experiment to validate the fidelity of the proposed method. Results reveal that the Mean Absolute Error (MAE) of the predicting seismic responses is relatively small, whose value is below 0.014 in most of the time. These small MAE values indicate that the proposed gRK4-PINN performs well in predicting the seismic responses of the CGHSR bridge.
Keywords
Introduction
As the lifeline project, ensuring the structural safety of bridges is of paramount significance to the socio-economic development (Zhang and Alam, 2019). In recent years, the world has entered an active seismic period, with a series of devastating earthquakes occurring all over the world, including the Wenchuan Earthquake (Wang, 2008), the East Japan Earthquake (Krausmann and Cruz, 2013), and earthquakes in Turkey (Taftsoglou et al., 2023). The social and economic losses resulting from bridge-related seismic disasters have been significant (Zhong et al., 2023). How to rapidly and effectively assess the bridge seismic-resistant capability has become a key issue influencing the safety of transportation networks.
Acquiring the seismic response of bridges is pivotal for conducting comprehensive seismic analysis, such as vulnerability analysis (Rahman and Ullah, 2012), reliability analysis (Afshari et al., 2022), correction of nonlinear model (Touzé et al., 2021), et al. Traditionally, bridge seismic analysis relies on elastic-plastic finite element methods, which is time-consuming and exhibits poor real-time performance (Aghagholizadeh, 2020; Gönen and Soyöz, 2021; Krishnamoorthy and Anita, 2016). To mitigate the computational costs associated with bridge seismic analysis, surrogate models such as multiple regression models (Huang and Huang, 2020), Kriging models (Fuhg et al., 2021), ARMA models (Zhao et al., 2023), and support vector machines (Alizadeh et al., 2020) have been widely adopted. Due to the limited number of model parameters, these models are typically suitable for predicting the dynamic responses of simple linear systems, making them challenging to apply to complex dynamic systems (Barkhordari and Tehranizadeh, 2021; Oh et al., 2020; Wang et al., 2023). To this end, deep learning technology has been employed for predicting bridge seismic responses due to its excellent nonlinear fitting capabilities (Li et al., 2022; Liao et al., 2023). For instance, Convolutional Neural Networks (CNNs), Recurrent Neural Networks (RNNs), and their improved variants have been utilized for seismic response prediction of engineering structures (Ning et al., 2023; Shokri and Tavakoli, 2019; Zhang R et al., 2019). Although these models have proven to be effective in predicting bridge seismic responses, two prominent shortcomings remain (Cai et al., 2021; Raissi et al., 2019): (a) the models heavily depend on extensive training data for accurate predictions; (b) neural networks lack clear and explicit physical interpretations, especially for deep network models.
In recent years, Physics-Informed Neural Networks (PINNs) have found extensive applications in solving differential equations (Blechschmidt and Ernst, 2021; Cuomo et al., 2022; Schiassi et al., 2021). By embedding physical information into the neural network, PINN exhibits superior predictive performance with limited training samples. It has been applied extensively in science and engineering, attaining significant success (Huang and Wang, 2022; Xu et al., 2023). Essentially, there exists two primary types of PINN, that is, the classic PINNs and the hybrid PINNs (Nascimento et al., 2020). As for the classic PINNs, the physical equations are added to the loss function as soft penalty constraints (Pan and Duraisamy, 2020). Alternatively, hybrid PINNs do not simply incorporate the physical information into the loss function; instead, the physical model is intricately integrated with the neural network (Yucesan and Viana, 2022). As a typical hybrid PINN, Fourth-Order Runge-Kutta PINN (RK4-PINN) is commonly employed for solving forward and inverse problems involving ordinary differential equations (Meng et al., 2020; Raissi et al., 2019). The unique structure of RK4-PINN neurons makes it outperform conventional CNN and RNN models. The physical model and neural network are deeply integrated in RK4-PINN, making the black-box network interpretable, which is a promising area in the future (Mattey and Ghosh, 2022; Zhong et al., 2022). Nevertheless, in aforementioned works, RK4-PINN was solely utilized to solve simple dynamic systems, whose potential application in seismic analysis for complex structures, such as high-rise buildings, large-scale bridges, et al., remains to be explored. Additionally, how to improve the efficiency and accuracy still remains an open challenge.
This work aims to establish an effective scheme to predict the seismic responses at critical locations of bridges. A large-span continuous girder high speed railway (CGHSR) bridge is adopted as the engineering background (Liang et al., 2021; Xing et al., 2022). The seismic responses at bridge critical locations are equivalent to that obtained by the equivalent system, whose unknown parameters are identified using the gradient-enhanced RK4-PINN (gRK4-PINN). The effectiveness of the method was validated through a numerical experiment. The remaining sections are arranged as follows. The following Section introduces the basic conception, including the governing equations and the architecture of the gRK4-PINN. Then, a numerical experiment is performed to test the fidelity of the method. Finally, conclusions are summarized.
Basic conception
Governing equations
The dynamic system under seismic excitation is utilized to illustrate the concept, which can be expressed as (Liang et al., 2021; Xing et al., 2022):

The finite element models (FEMs) of the real complex engineering structures usually have large number of degrees of freedom (DoFs), that is, the mass, stiffness and damping matrices have extremely large scales, making the solution of Eq. (1) particularly challenging. Since the structural seismic response is the typical forced vibration, while the filtering effect of the site will result in the presence of predominant period in seismic motion. Thus, inspired by the Equivalent Linearization Method, the following Equivalent Single DoF (ESDoF) oscillator is utilized to model the seismic response at critical locations of the structure (Yazdanpanah et al., 2022).

Architecture of gRK4-PINN
To model and identify the ESDoF system in Eq. (2), the gRK4-PINN is adopted. Firstly, the Fourth-Order Runge-Kutta (RK4) method is briefly introduced. Consider the second order differential equation for the ESDoF system, that is, Eq. (2), which can be rewritten as (Press, 2007):



Quantities used in RK4 method.


Architecture of gRK4-PINN.
From Eqs. (5) and (6), X are recursively fed back into F four times at each time step. Thus, function F is the key information in RK4 method. Here, since the system parameters remain to be determined, function F is only partially known. To this end, the gRK4-PINN is utilized to identify the ESDoF system.
Table 1 presents the solution process of the RK4 method, with the parameters explained analogous to Eqs. (2) to (6). As shown in Figure 1, the general structure of gRK4-PINN is similar to Recurrent Neural Network, in which the ground motion 



Numerical experiment
To demonstrate the effectiveness and give more details when utilizing the gRK4-PINN, numerical experiments of seismic responses prediction for a large-span continuous girder high speed railway (CGHSR) bridge are designed.
Engineering background
In this section, a CGHSR bridge under seismic excitation is selected to elucidate the effectiveness of the gRK4-PINN. Figure 2 shows the structure layout of the CGHSR bridge, consists of a cast-in-place, non-uniform cross-section concrete box girder with a layout of 68m + 132m + 68m. The bridge girder is constructed using C55 concrete. Four solid reinforced shaft piers are constructed using C35 concrete, which are numbered from pier 1# to pier 4#. Layout of the CGHSR bridge configuration (Unit: m).
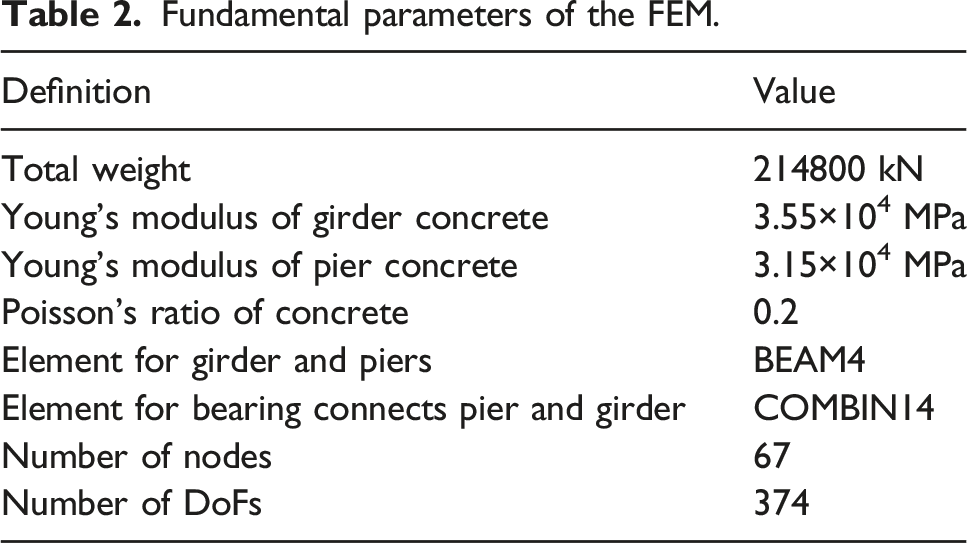
Then, a lumped mass FEM is established using commercial code ANSYS, as shown in Figure 3. Some fundamental model parameters are summarized in Table 2. FEM of the CGHSR bridge. Fundamental parameters of the FEM.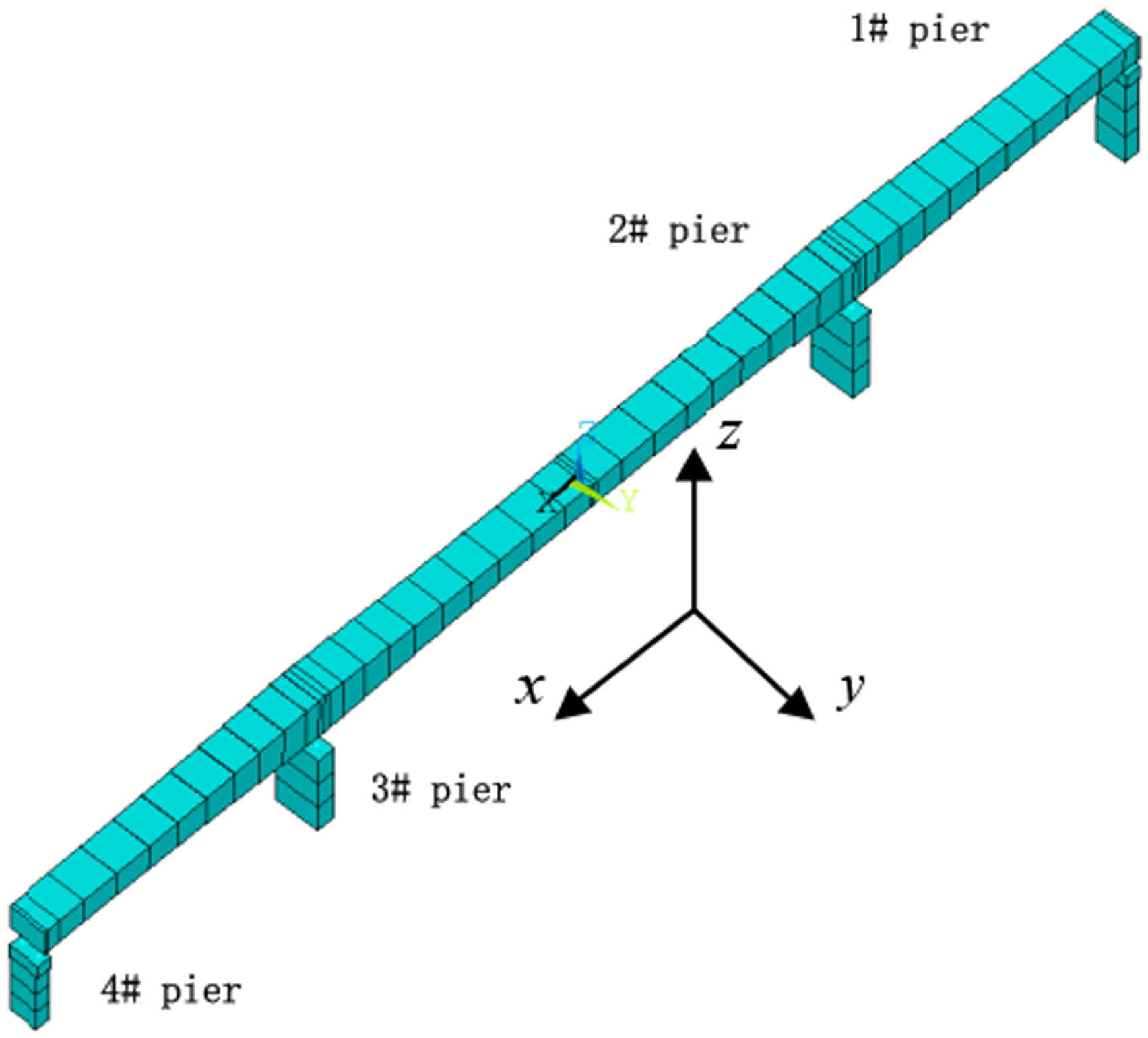
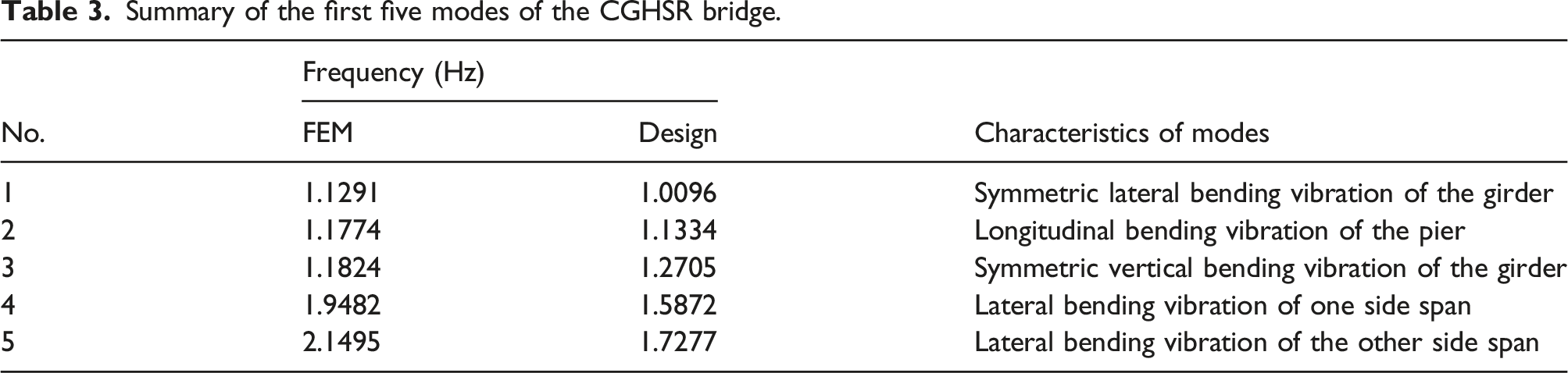
Summary of the first five modes of the CGHSR bridge.
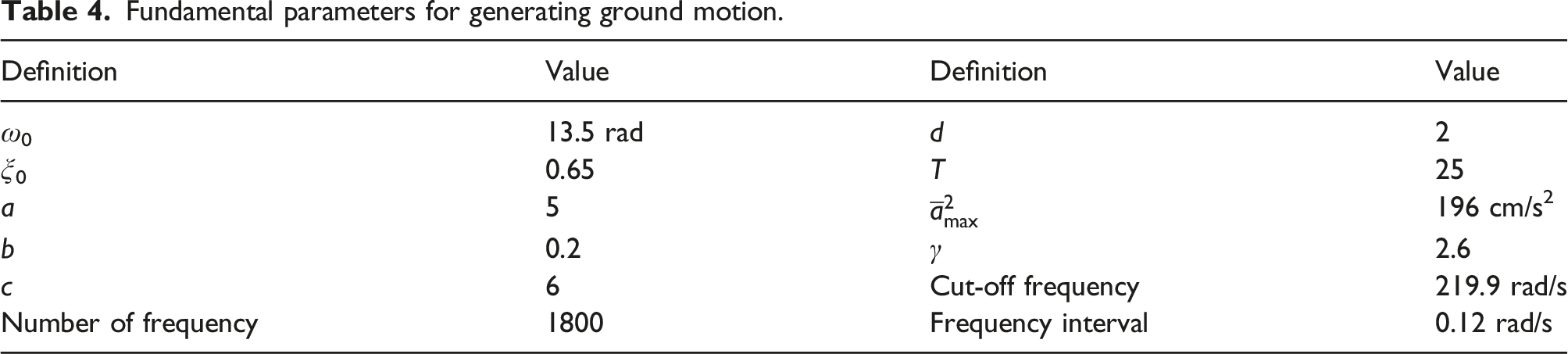
Generation of the ground motions

Fundamental parameters for generating ground motion.
The generated representative samples are shown in Figure 4. What’s more, the standard deviation and the ensemble response spectrum of the generated samples are compared with the targets, as shown in Figure 5. Generated representative samples. Comparison between the standard deviation and the ensemble response spectrum of the generated samples with the target.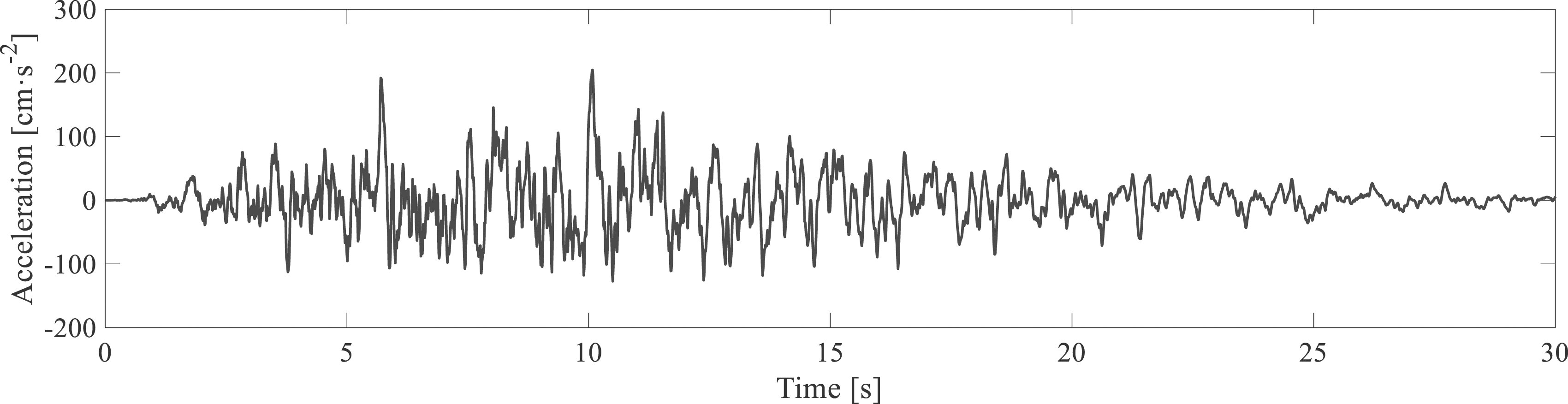
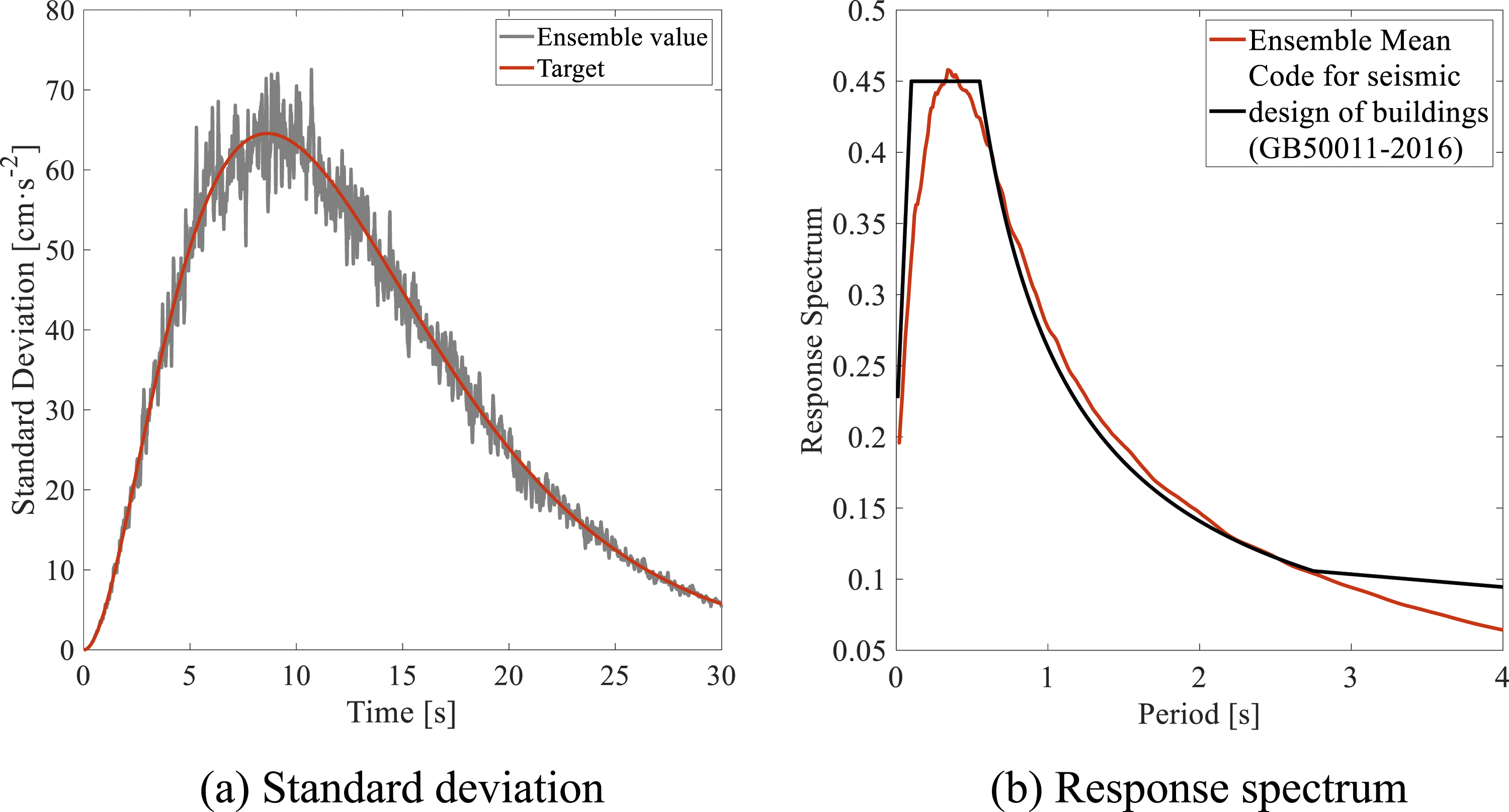
As shown in Figures 4 and 5, the generated ground motion has reasonable amplitude, while the ensemble standard deviation and the response spectrum agree well with targets. This demonstrates that the generated samples can be further utilized for structural seismic responses analysis.
Seismic response prediction
Using the generated ground motions in above section, the seismic response analysis of the bridge can be performed. The seismic response at the top of the pier 2# is selected as the interesting quantity, which is utilized as targets to validate the validity of the predicting response obtained by gRK4-PINN. The parameters of the ESDoF system in Eq. (3) are identified using 20 randomly selected generated ground motions and the corresponding seismic responses. The mean of the identified m
eq
, c
eq
and k
eq
are 5.823×104 kg, 5.572×104 kg/s and 5.537×106 kg/s2, respectively. The remaining samples were used as the test set to validate the performance of the model. It is noted that predicting the displacement responses of the remaining 124 samples takes no more than 10 s, while using finite element methods requires several hours. This indicates that employing deep learning methods offers significantly higher computational efficiency. Several representative predicting samples are randomly selected and compared with the targets, that is, the numerical results obtained by the seismic analysis of the bridge FEM, as shown in Figure 6. Furthermore, using the same training samples, the seismic response was predicted by the RK4-PINN network, results are also exhibited in Figure 6. Note that the displacement data fed in the neural network are contaminated with Gaussian noise with zero mean and 2×10-3 standard deviation. gRK4-PINN predicting results with noisy training samples.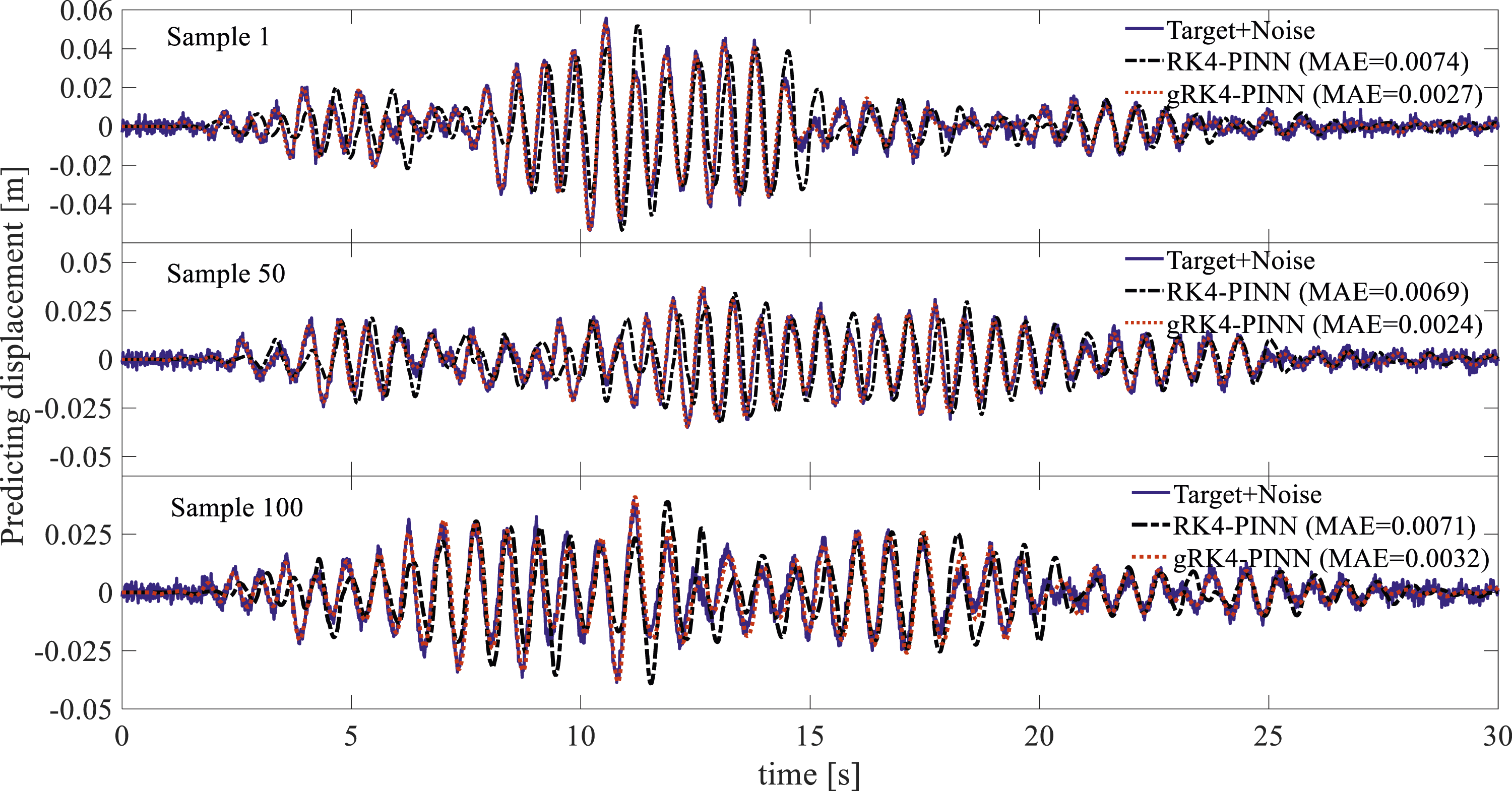
It can be seen from Figure 6 that the predictions converge to the noisy training samples, filtering the noise in training data, indicating the gRK4-PINN can effectively identify the ESDoF system parameters and achieve relatively accurate predictions. However, the RK4-PINN prediction results exhibit a certain deviation from the targets, suggesting that, when using the same training samples, the gradient loss function is advantageous for enhancing the training accuracy. What’s more, the Mean Absolute Error (MAE), which is a common metric to evaluate the network performance, is also exhibited. It is evident that the MAE of the gRK4-PINN results is relatively smaller than that of RK4-PINN. For example, the MAE is 0.0027 for gRK4-PINN in sample 1, which is 0.0074 for RK4-PINN. This further confirms the importance of the gradient loss function in network training. To further elucidate the performance of the hybrid PINN, the frequency distribution of the MAE for all samples is statistically analyzed, as shown in Figure 7. Frequency distribution of MAE for all samples.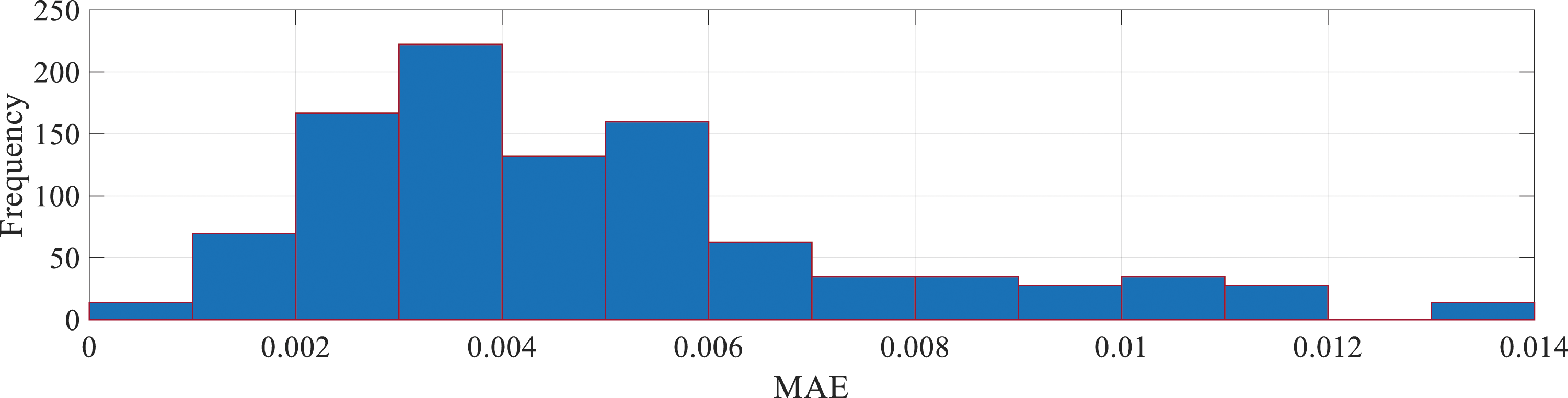
As shown in Figure 7, the MAE is below 0.014 in most of the time. These values are sufficiently small, indicating the well performance of the hybrid PINN in predicting bridge seismic responses.
Conclusions
In this work, a novel gradient-enhanced RK4-PINN is developed to conduct the seismic prediction of the CGHSR bridge. The bridge seismic response at critical locations is computed through Eq. (3) emanated from the concept of a SDoF system. The system unknown parameters are identified using the gRK4-PINN. The effectiveness and efficiency of the proposed methods are demonstrated via a numerical experiment. Conclusions can be drawn as follows. (1) gRK4-PINN can effectively identify the unknown parameters of the ESDoF system. In this case, the mean of the identified m
eq
, c
eq
and k
eq
are 5.823×104 kg, 5.572×104 kg/s and 5.537×106 kg/s2, respectively. (2) gRK4-PINN demonstrates a certain level of robustness. The predicting results converge to the noisy training samples, filtering the noise in training data. (3) The gRK4-PINN can achieve relatively accurate predictions. The MAE of the predictions is below 0.008, while never above 0.014 in most of the time.
The gRK4-PINN network model still faces several challenges that limit its further application in the field of structural seismic prediction: a) The selection of model parameters can significantly impact prediction accuracy, often requiring empirical knowledge or extensive experimentation to determine optimal values; b) When dealing with complex structural systems, various seismic loading scenarios, or nonlinear effects, the generalization ability of the model may decrease, leading to diminished predictive performance; c) Training processes for complex structural models and large-scale datasets typically demand substantial computational resources.
Footnotes
Author contributions
Conceptualization, Funding acquisition, Writing - original draft. Software, Funding acquisition, Formal analysis. Supervision, Funding acquisition, Data curation.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work was jointly supported by the National Natural Science Foundation of China (Nos. 52208468, 52208481 and 52338011), the China Postdoctoral Science Foundation (No. 2023M730581), the Natural Science Foundation of Jiangsu Province (No. BK20220851) and the Fundamental Research Funds for the Central Universities.