
Abstract
The Bayesian model updating method is widely applied in structural health monitoring. Traditional Bayesian model updating methods suffer from limitations such as dimensional constraints, slow convergence, and low computational efficiency. To enhance the convergence speed and computational efficiency of Bayesian model updating methods, this paper proposes a multi-sampling strategy integrated Bayesian model updating method based on the Differential Evolution Adaptive Metropolis (DREAM) algorithm. First, the Kalman-inspired distribution and sampling difference vectors from past states are introduced into the DREAM algorithm, addressing the issue of parallel chain limitations in DREAM and improving the exploration efficiency of the posterior distribution. Second, drawing inspiration from clustering algorithms that use centroids for data point clustering, a novel centroid update sampling strategy is proposed and integrated with other sampling strategies to increase sampling diversity among different chains, thereby avoiding local optima and accelerating the convergence process. Finally, the proposed method’s effectiveness is validated through numerical examples of simply supported beams and experimental examples of a three-story frame structure. The results demonstrate that the proposed Bayesian model updating method based on multi-sampling strategy integration achieves high updating accuracy and faster convergence. The updated model shows improved ability to simulate the inherent properties and response characteristics of actual structures, making it suitable for use as a benchmark model in structural health monitoring.
Keywords
Introduction
The accuracy of the structural baseline finite element model (FEM) is crucial in structural health monitoring (Kamariotis et al., 2022; Zhou et al., 2016). However, due to factors such as model simplifications and structural damage, there exists a certain discrepancy between the FEM and the actual structure, rendering the established FEM unsuitable for use as a baseline model in structural health monitoring (Rosati et al., 2022). Therefore, finite element model updating (FEMU) techniques that can reduce the error between the FEM and the actual structure have garnered significant attention from many researchers (Caicedo and Zárate, 2016; He et al., 2024; Lin et al., 2022). Among the various FEMU methods, deterministic FEMU methods were developed earliest. However, these methods treat the parameters to be updated as constants without considering the uncertainties that are prevalent in practical engineering, which leads to a reduction in the reliability of the updated FEM (Simoen et al., 2015). To address this issue, many researchers have proposed probabilistic FEMU methods. These methods quantify multi-source uncertainties in practical engineering by treating the parameters to be updated as probability distributions, and have become a mainstream direction in the research of FEMU methods (Liu and Jiang, 2022).
In probabilistic FEMU methods, Bayesian inference is widely applied due to its advantages in statistical inference and parameter estimation, gradually forming the Bayesian model updating framework (Xu et al., 2022). Within this framework, the assumptions of prior information, the construction of the likelihood function, and the estimation of posterior probability density have become the three key issues in Bayesian model updating research. The assumptions of prior information are typically determined based on the researcher’s experience, multiple experimental tests, and the prior uncertainty quantification of parameters (Faes et al., 2019; Lam et al., 2024). The likelihood function is a conditional probability density function (PDF) that provides a measure of consistency between the model output and test data (Goller et al., 2012). Over the years, the forms of likelihood functions have become increasingly diverse. Examples include normal likelihood functions (Goller et al., 2011), Gaussian likelihood functions (Shi et al., 2024), combined normal-lognormal distribution likelihood functions (Das and Debnath, 2018), approximate Bayesian computation likelihood functions (Bi et al., 2019), and likelihood-free Bayesian inference (Ni et al., 2022). Although different likelihood functions have demonstrated their respective advantages in specific problems, the Gaussian likelihood function remains the most widely used due to its efficiency and versatility. Once the prior information and likelihood function are determined, the estimation of the posterior PDF of the parameters to be updated becomes a critical issue that affects the accuracy of Bayesian model updating. Since the estimation of the posterior PDF of the parameters involves high-dimensional integration, it is generally challenging to directly obtain the posterior PDF of the parameters to be updated (Beck and Au, 2002). To address this issue, various sampling-based posterior PDF estimation methods have been developed. Lam et al. (2015) used the Markov chain Monte Carlo (MCMC) simulation method to sample a set of models in high-probability regions to resolve the unresolvable posterior PDF of parameters in complex parameter spaces, and validated their approach through a coupled floor system of a building structure. Sengupta and Chakraborty (2023) proposed a Bayesian model updating method based on the improved transitional Markov chain Monte Carlo (TMCMC), which enhances the posterior PDF estimation of the parameters by considering different dimensional observations in the sampling space. This method was validated through numerical and experimental examples. Ding et al. (2022) applied the Delayed Rejection Adaptive Metropolis-Hastings (DRAM) algorithm for Bayesian model updating, and validated the proposed FEMU method through a three-story frame structure. However, the aforementioned Bayesian model updating methods based on MCMC and its improved forms are single-chain methods, whose convergence performance depends on the prior distribution, and they exhibit certain limitations when addressing high-dimensional problems with large data samples (Vrugt et al., 2008; Zeng and Kim, 2022). In contrast, multi-chain methods, which involve the parallel operation of multiple Markov chains combined with different sampling strategies, have emerged as a powerful approach for handling complex posterior PDF. Sherri et al. (2019) proposed a multi-chain FEMU method based on the Differential Evolution Markov Chain Monte Carlo (DE-MC) algorithm, combining the Differential Evolution (DE) algorithm with the MCMC algorithm, and validated the proposed FEMU method through two real-world examples. Chen et al. (2022) compared the performance of the DE-MC algorithm with traditional MCMC algorithms, demonstrating the advantages of DE-MC in multimodal problems and parameter estimation. Vrugt (2016) proposed the Differential Evolution Adaptive Metropolis (DREAM) algorithm, which performs a global search through multiple chains and automatically adjusts the scale and direction of sample distribution in the random subspace during the search process. Jin et al. (2019) compared the DRAM, adaptive hybrid MCMC, and DREAM algorithms, finding that DREAM outperforms the other two methods in terms of parameter estimation convergence. However, in the standard DREAM algorithm, the number of parallel chains N must be set to at least d/2 (where d is the number of parameters to be updated), and each chain needs to converge to achieve the posterior PDF of the parameters, which presents challenges such as outlier chains, slow convergence, and high computational cost in practical engineering applications (Qin et al., 2023).
Based on the above analysis, this paper addresses the issues of multi-chain MCMC methods in FEMU by proposing a multi-sampling strategy integrated Bayesian model updating method based on the standard DREAM algorithm. First, the Kalman-inspired distribution and differential vector sampling strategy from past states are introduced into the DREAM algorithm to resolve the limitation on the number of parallel chains in the DREAM algorithm, thereby improving the exploration efficiency of the posterior distribution. Second, inspired by the concept of centroid-based data clustering in clustering algorithms, a centroid update sampling strategy is proposed and integrated with other sampling strategies to increase sampling diversity among different chains, avoiding local optima and accelerating the convergence process of the algorithm. Finally, the effectiveness of the proposed Bayesian model updating method based on multi-sampling strategy integration is validated through numerical examples of simply supported beams and experimental examples of a three-story frame structure.
Bayesian model updating theory
The core of the Bayesian model updating theory is to combine the prior information of the parameters to be updated with experimental observation data, using Bayes' theorem to solve the posterior distribution of the parameters. It is worth noting that the experimental observation data used in this paper are structural modal parameters. Therefore, assuming that in structural dynamic modeling and simulation analysis, the parameter to be updated is








From equation (7), it can be seen that the posterior PDF of the structural parameter
Bayesian algorithm with multi-sampling strategy integration
DREAM algorithm
The DREAM algorithm is a multi-chain MCMC algorithm that initially generates N starting sample points, corresponding to N Markov chains, based on the prior information of the parameters. At the t-th iteration of the i-th chain, a




Kalman-inspired distribution
The Kalman-inspired distribution is motivated by the state analysis steps of the Kalman filter and is designed to enhance the exploration efficiency of the chain towards the posterior distribution when dealing with high-dimensional target distributions. The candidate sample

Sampling difference vectors from past states
To reduce the number of parallel chains and improve the convergence speed of the algorithm, the differential vector in the update process of equation (9) can be sampled from past states of the Markov chains. This approach avoids the requirement that the number of parallel Markov chains N must be greater than the parameter dimension d. The main steps for sampling differential vectors from past states of the Markov chains are as follows: (1) Generate an initial set of past state vectors (2) Define the sparsification rate K, where the set (3) Add the updated set (4) If convergence is achieved (R
c
< 1.2) or the final iteration number T is reached, proceed to step 5; otherwise, return to step 2. (5) Discard the initial samples and burn-in samples from
Centroid update
The strategy of estimating the optimal solution direction through centroids is widely used in data science and machine learning, particularly in clustering algorithms (Kong et al., 2024; Xu and Jiang, 2022). Inspired by the concept of using centroids for data point clustering in clustering algorithms, this paper proposes a centroid update sampling strategy, which is integrated with other sampling methods and applied to the DREAM algorithm. The core of the proposed centroid update sampling strategy is to use the centroid to update the state of the Markov chain. In each iteration, the centroid of multiple Markov chains is used as the target position to guide each chain’s movement, ensuring that all chains gradually converge toward the center of the overall data distribution. The specific main steps are as follows: (1) Randomly select N′ chains (2) Calculate the centroid (3) Define the step size coefficient λ, and update the sample (4) Determine whether to accept the new candidate sample
From the above steps, it can be seen that the choice of step size coefficient λ is crucial. An appropriate step size coefficient λ helps guide all chains to gradually converge toward the center of the overall data distribution. However, if the step size is too large, it may cause excessive jumps during the update process, affecting the effectiveness of the sampling. Conversely, if the step size is too small, the convergence may be too slow. Therefore, it is usually necessary to continuously adjust the step size based on the specific problem to achieve optimal sampling efficiency. Compared to the Snooker update strategy (Qin et al., 2023), the centroid update sampling strategy does not require correction when calculating the acceptance rate, which improves the computational efficiency of the algorithm. Additionally, by moving the current state of each Markov chain toward the centroid position of multiple Markov chains, the strategy helps ensure that all chains move closer to the overall data distribution center, making them more aligned with the global probability distribution. This approach helps avoid getting trapped in local optima and accelerates the convergence process of the algorithm. Moreover, for multi-chain algorithms, the centroid update sampling strategy increases diversity among different chains, thereby enhancing sampling efficiency.
Multi-sampling strategy integration
The Bayesian algorithm with integrated multi-sampling strategies is based on the DREAM algorithm, combining the Kalman-inspired distribution, sampling difference vectors from past states, and the centroid update sampling strategy. Based on the theories discussed in the previous sections, the calculation formula for the candidate sample


After updating the candidate samples, the acceptance rate of the candidate samples is calculated according to equations (11) and (12). The outlier chains are detected, and the convergence is assessed, ultimately resulting in an accurate and stable posterior distribution of the parameters. The flowchart of the Bayesian model updating method based on multi-sampling strategy integration is shown in Figure 1. Flowchart of the Bayesian model updating method based on multi-sampling strategy integration.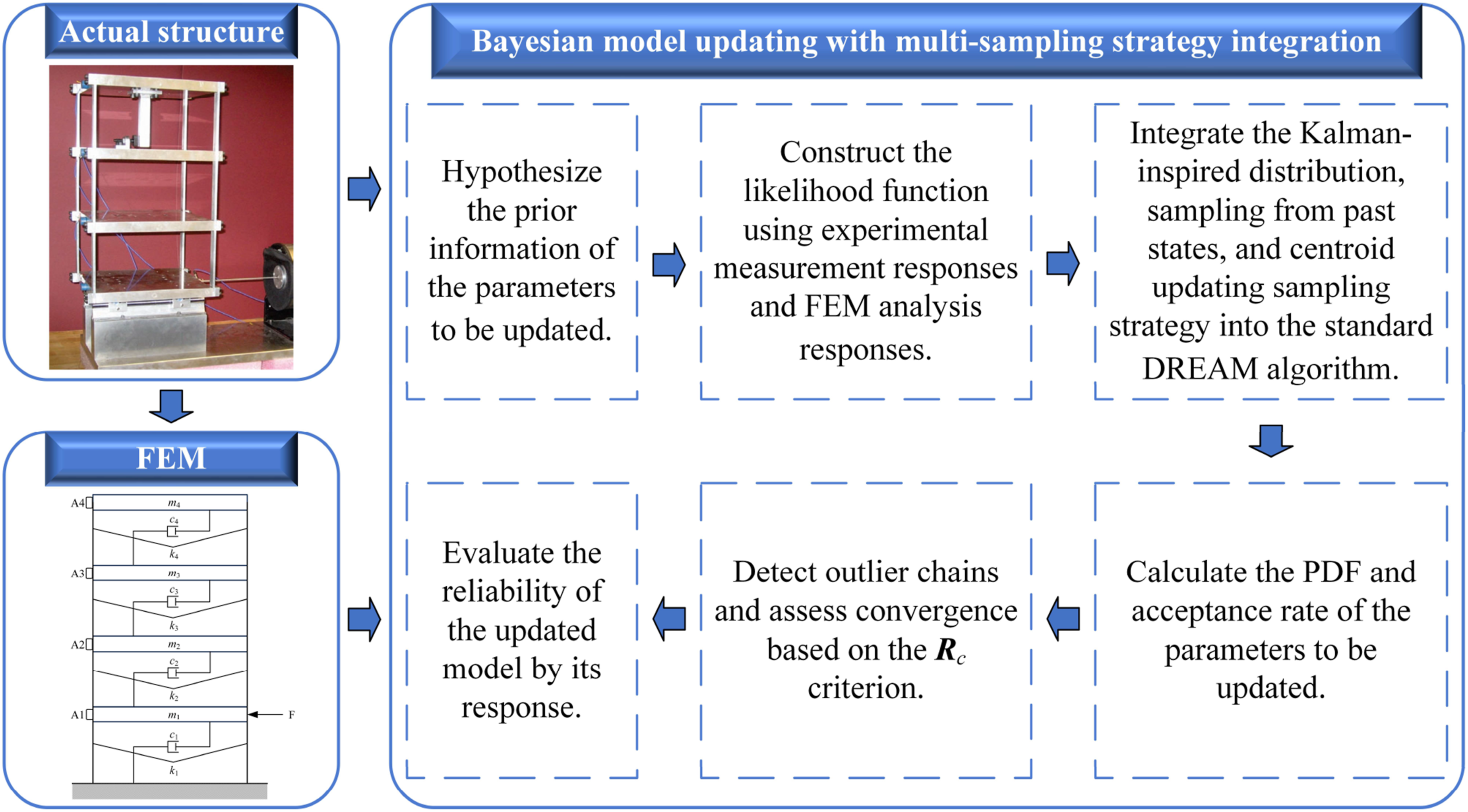
Numerical example
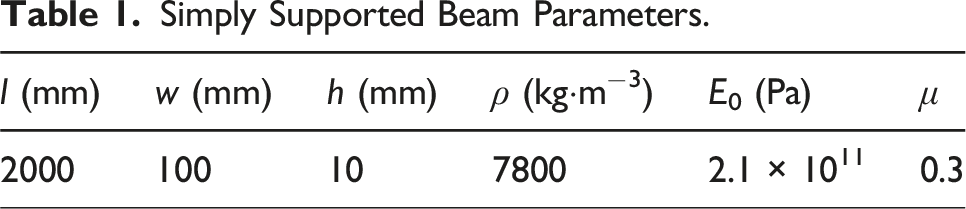
Simply Supported Beam Parameters.

Simply supported beam structure (Unit: mm).
Initial and True Values of the Updating Parameters.
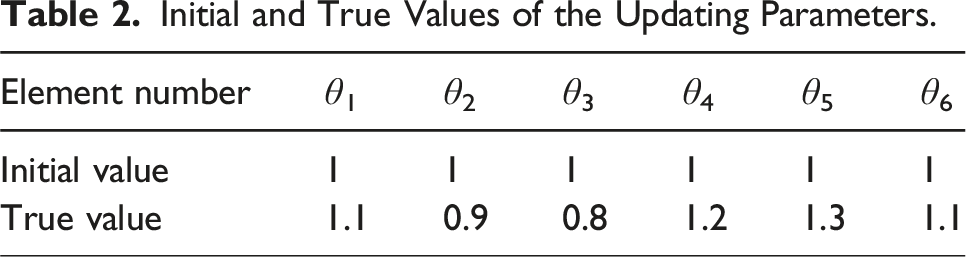
To simulate actual measured responses, the true values of Mean posterior PDF of the parameters to be updated at each iteration stage.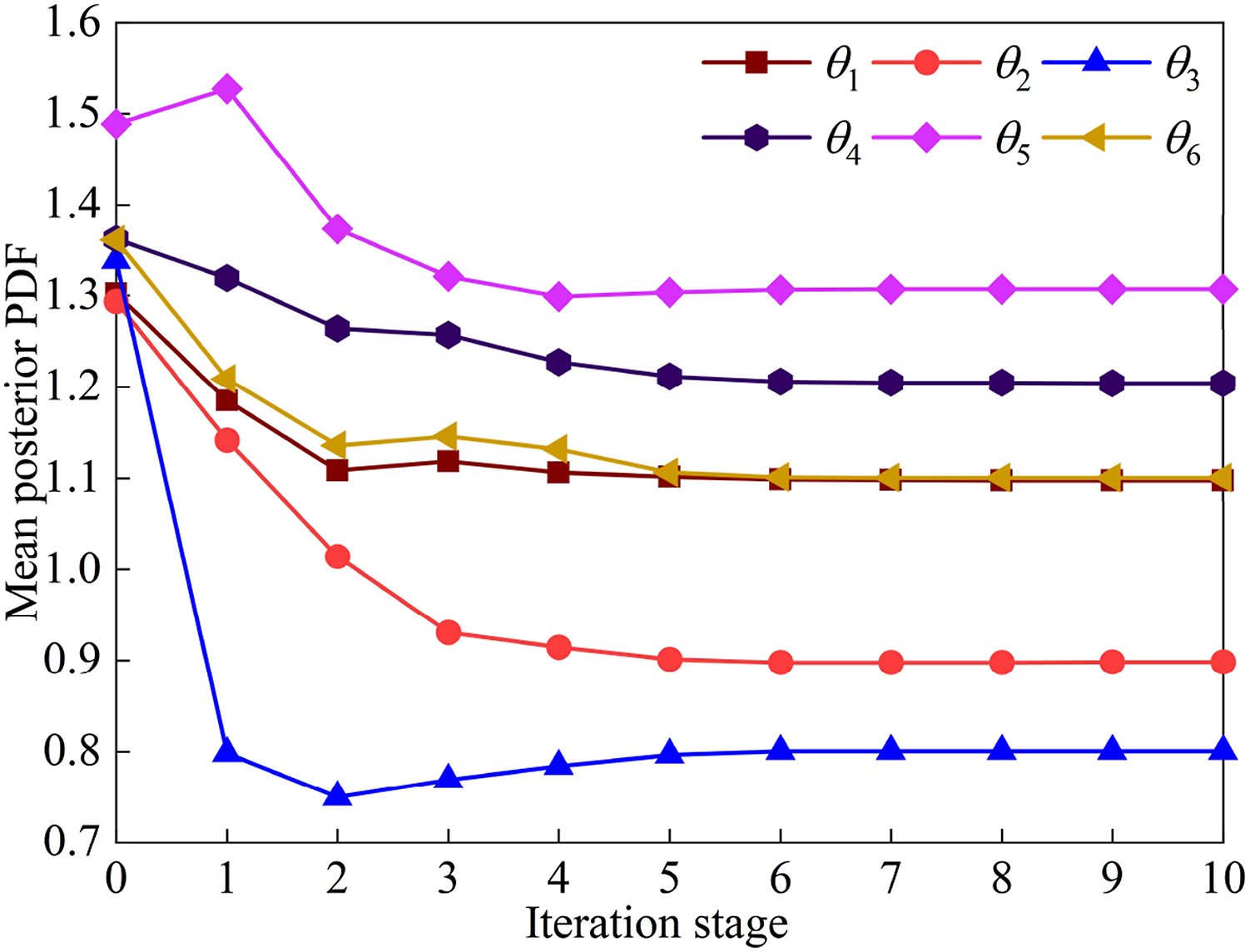
As shown in Figure 3, the initially generated values of the parameters to be updated (at stage 0) are far from the true values. However, as the number of iterations increases, the mean posterior PDF of the parameters rapidly decrease and gradually converge to values near the true values, indicating that the model has reached a stable state. To illustrate this process in detail, one of the Markov chains from the initially generated N chains is projected onto the θ1 and θ2 plane. The convergence plots of θ1 and θ2 samples at different stages are shown in Figure 4. Convergence plots of θ1 and θ2 samples at different stages.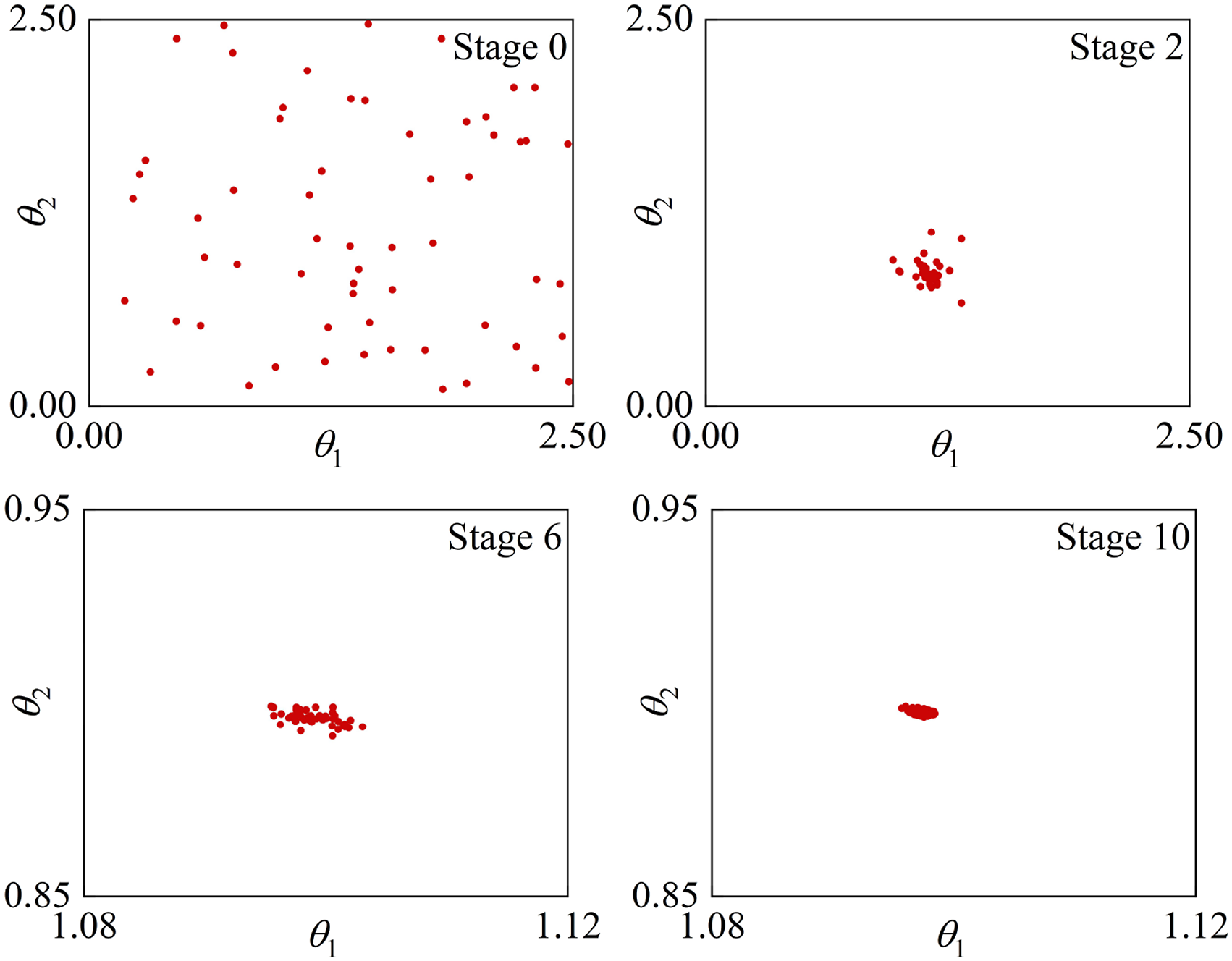
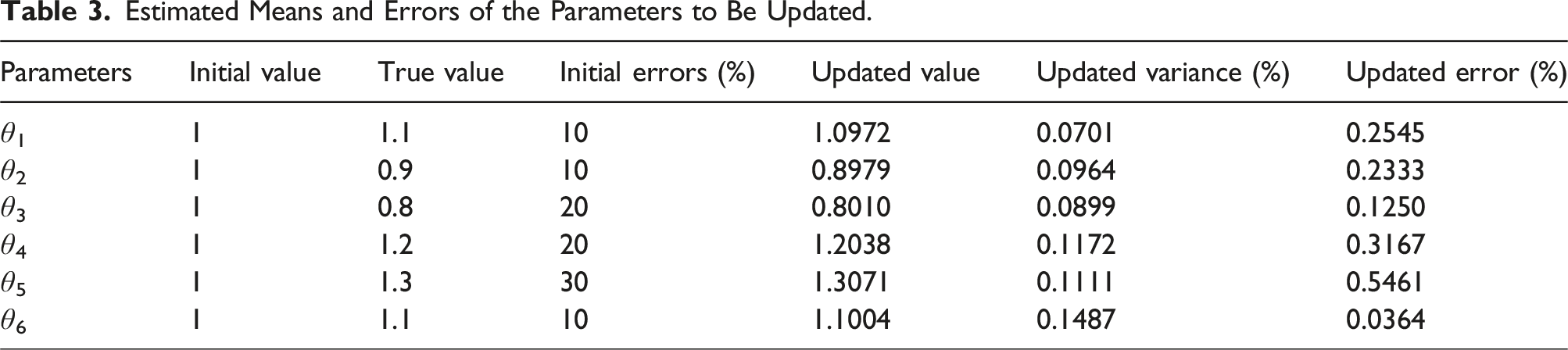
In Figure 4, stage 0 represents the 60 random samples uniformly generated within the interval [0.1 2.5], which serves as the initial past state vectors. According to the theory in sampling difference vectors from past states, the posterior samples of the parameters to be updated are obtained by continuously discarding the initial past state vectors and burn-in samples, as illustrated in stages 2, 6, and 10 in the figure. It is important to note that the true values of θ1 and θ2 are 1.1 and 0.9, respectively. In the final stage (i.e., stage 10), the mean posterior PDF of θ1 and θ2 concentrate towards (1.0972, 0.8979), and similar results are obtained for the other parameters to be updated, which are not elaborated here. The joint and one-dimensional marginal posterior distributions of the parameters to be updated are shown in Figure 5. Joint and one-dimensional marginal posterior distributions of the parameters to be updated.
Estimated Means and Errors of the Parameters to Be Updated.
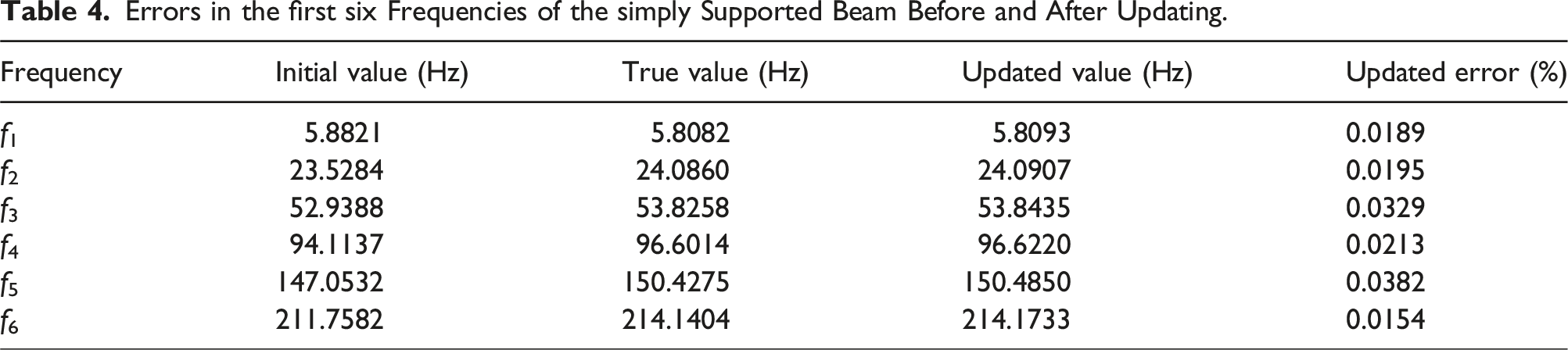
Errors in the first six Frequencies of the simply Supported Beam Before and After Updating.
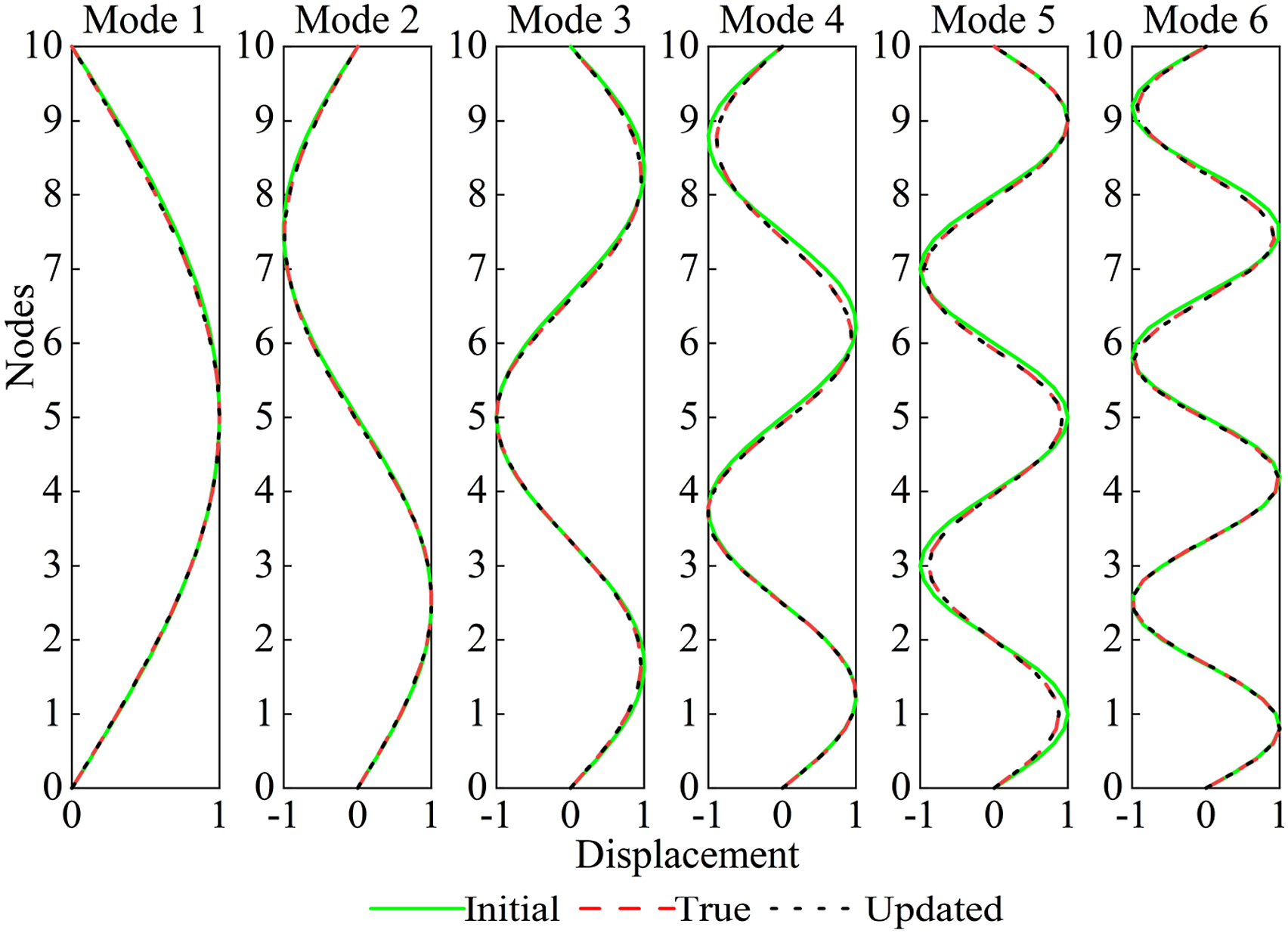
Normalized modal shapes of the first six modes of the simply supported beam.
As shown in Table 4, the errors between the first six natural frequencies of the simply supported beam after updating using both algorithms and their true values are minimal, all within 0.04%. Figure 6 illustrates that while there is some deviation between the initial mode shape curves and the true values, the updated mode shape curves after applying the proposed algorithm almost completely overlap with the true mode shapes. Both Table 4 and Figure 6 demonstrate the effectiveness of the proposed algorithm. However, the data used in the aforementioned validation process is structural modal data, which represents the inherent characteristics of the structure and is independent of external excitation. These factors lead to a low reliability of the updated FEM. Therefore, to verify the reliability of the updated FEM, a unit excitation is randomly applied to the simply supported beam, and the frequency response function (FRF) curve at a random point on the beam is measured. The FRF curves of the initial FEM, updated FEM, and true FEM of the simply supported beam are shown in Figure 7. The FRF curves of the simply supported beam.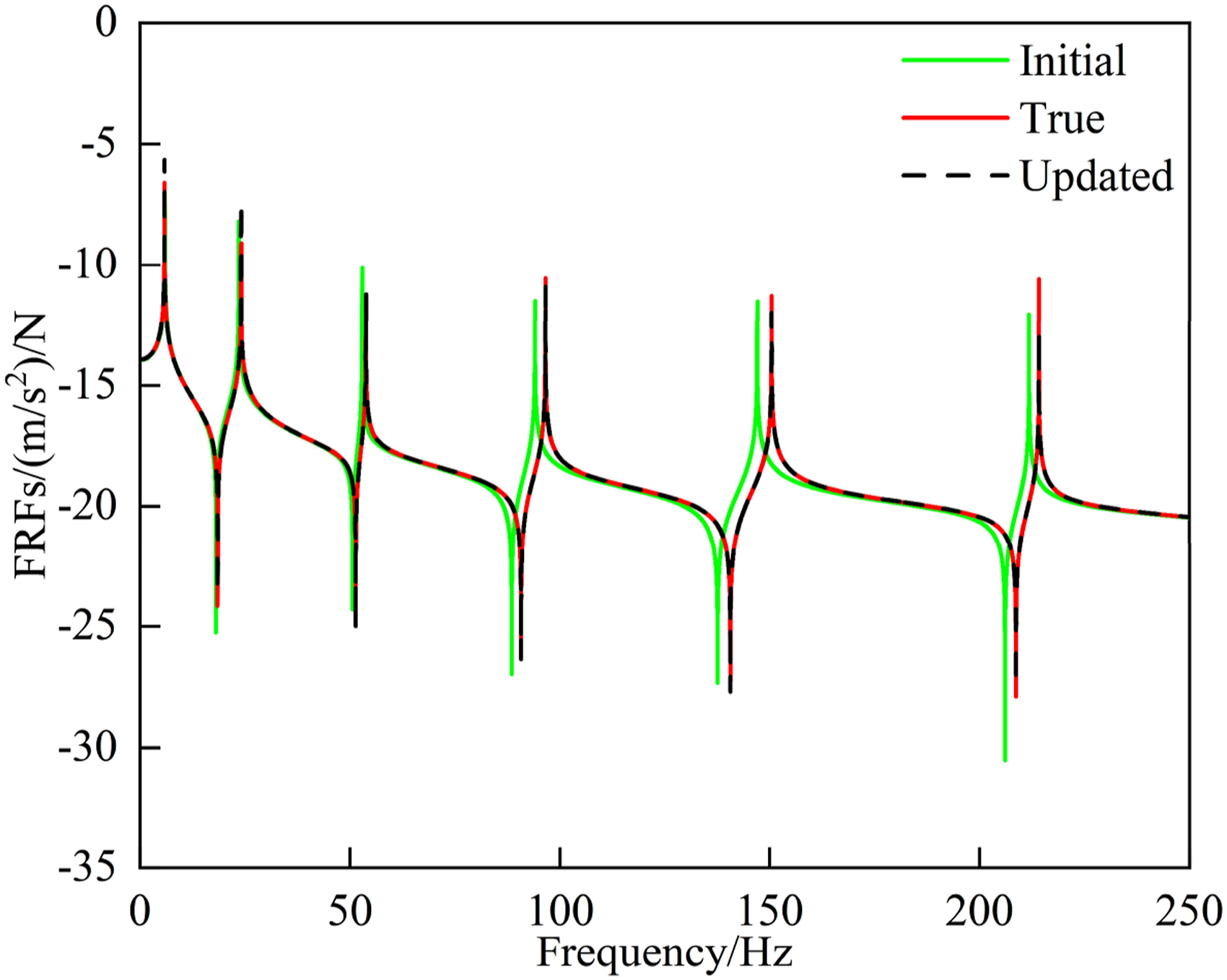
From Figure 7, it can be seen that the FRF curve of the initial FEM significantly deviates from that of the true FEM, indicating that the initial FEM has a weak capability to simulate the response characteristics of the true FEM. However, the FRF curve of the updated FEM coincides with that of the true FEM, demonstrating that the updated FEM has improved in simulating the true FEM. However, the Bayesian algorithm often struggles with computational efficiency, particularly when dealing with high-dimensional data or complex models. The need to compute posterior distributions, often through methods like MCMC, can lead to significant computational overhead, resulting in slow convergence and long processing times. To highlight the higher computational efficiency of the proposed algorithm, the R
c
convergence curves: (a) Algorithm from reference (Zhang et al., 2020); (b) Proposed algorithm.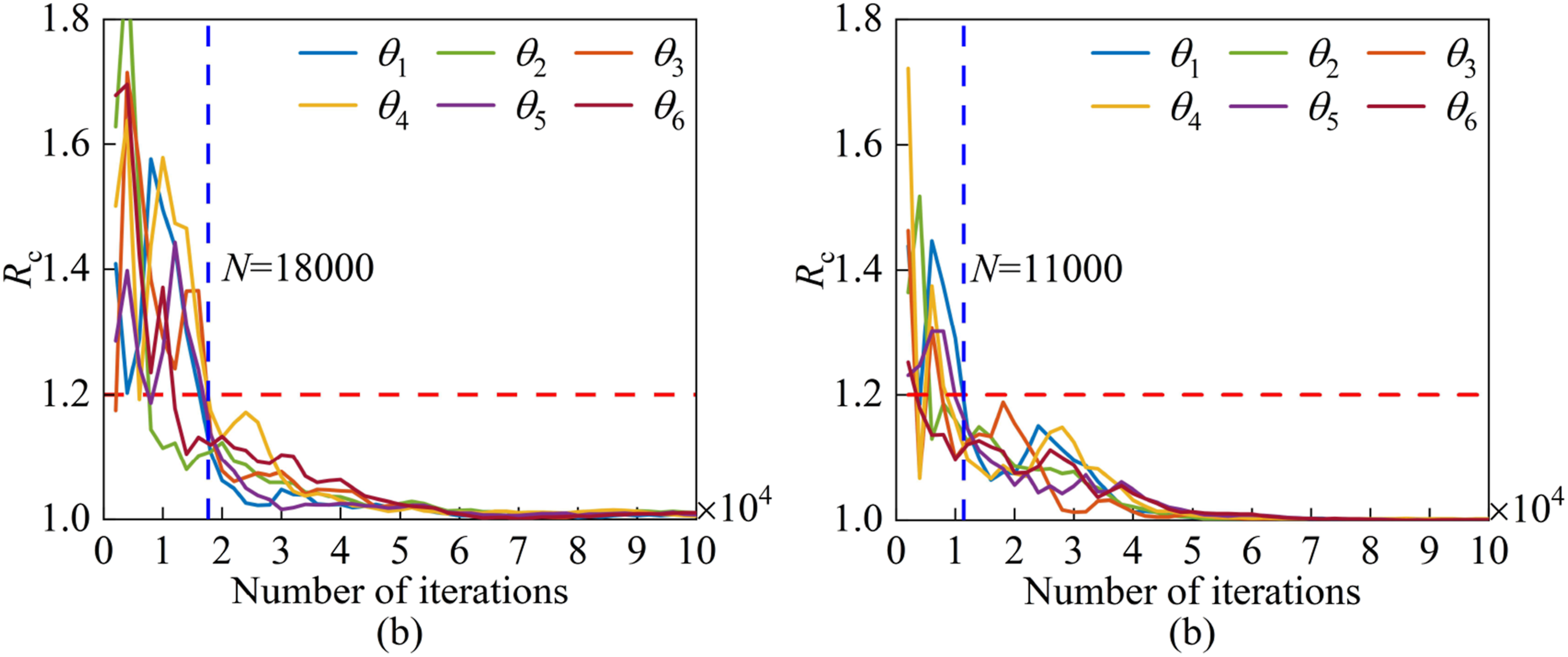
In Figure 8, the vertical axis represents the scale reduction factor R c value, and the horizontal axis represents the number of iterations of Markov chains. The red horizontal dashed line represents the threshold R c = 1.2, while the blue vertical dashed line indicates the iteration number at which all Markov chains reach R c = 1.2. The convergence time can be calculated based on the required number of iterations. According to the theory discussed in DREAM algorithm, when the R c values for all parameters to be updated are to the right of the blue dashed line(i.e., R c < 1.2), it can be considered that the Markov chains for these parameters have converged. As shown in the figure, the improved DREAM algorithm from the reference (Zhang et al., 2020) and the proposed algorithm reach convergence at the 18,000th and 11,000th iterations, respectively. This indicates that the proposed algorithm requires 7000 fewer iterations to achieve convergence compared to the improved DREAM algorithm in the reference (Zhang et al., 2020), demonstrating that the proposed algorithm has higher computational efficiency.
Experimental example
In this section, the proposed algorithm is validated using experimental data from the three-story frame structure at Los Alamos National Laboratory (LANL). This structure primarily consists of four aluminum plates and four aluminum columns, and is mounted on a track that allows only longitudinal sliding. Excitation is applied via a shaker connected at the base. Experimental modal parameters are measured using accelerometers installed on each floor, with a sampling interval of 3.1 ms, totaling 8192 data points, and a sampling frequency of 322.58 Hz. To avoid rigid body modes, the shaker was randomly excited with frequencies set between 20 and 150 Hz. Further details on the tests can be found in the experimental report on the LANL website and in the literature (Figueiredo et al., 2009). The actual three-story frame structure and the corresponding FEM are shown in Figure 9. In this study, the theoretical model of the structure is modeled as a 4-degree-of-freedom system, with A1, A2, A3, and A4 as acceleration response measurement points. The stiffness k1 and damping c1 are used to simulate the friction between the track and the structure. Three-story frame structure: (a) Actual structure; (b) FEM.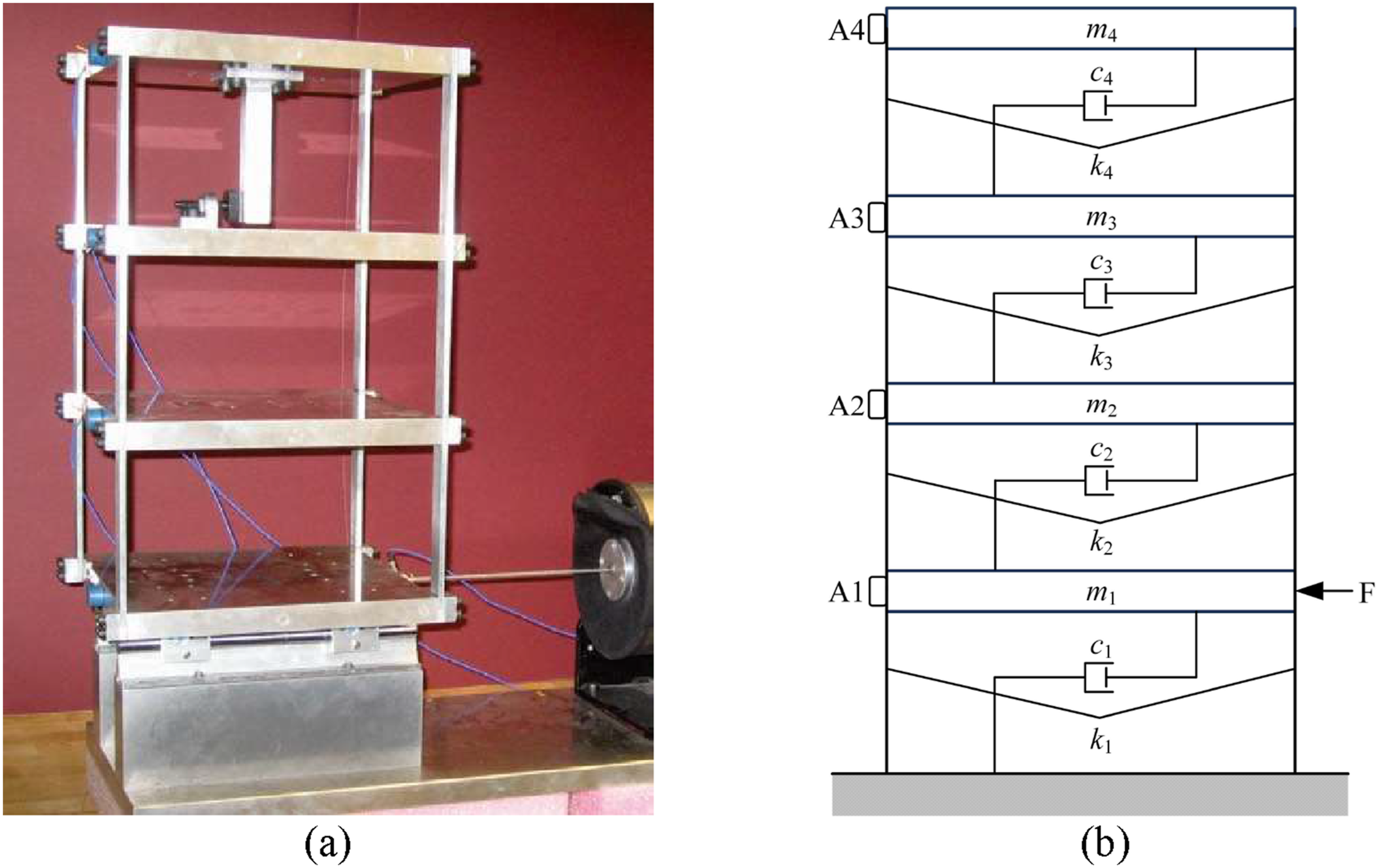
Frequencies and Errors of the FEM and the experimental Structure.
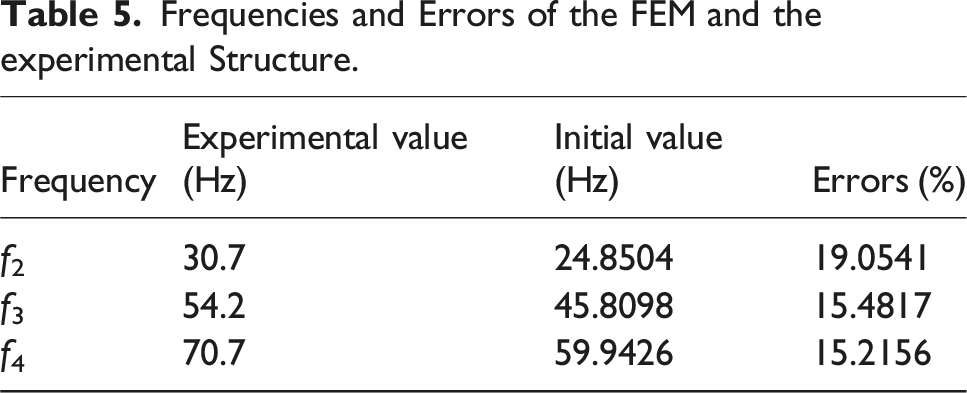
As shown in Table 5, there is a significant error of frequency between the FEM and the experimental structure, indicating the need to update the FEM to reduce the discrepancy between the FEM and the experimental structure. Since the material properties of the structure do not vary significantly, but additional mass factors such as the sensors and bumpers mounted on the aluminum plates were not considered in the modeling process, and the stiffness of each floor did not account for overall coupling effects, the normalized values of the mass parameters m1, m2, m3, and m4, and the stiffness parameters k2, k3, and k4 are selected as the parameters to be updated. Since the literature (Figueiredo et al., 2009) only provides frequency data without mode shape data, the mode shape data identified in the literature (Dessena et al., 2024) are used as experimental data. The 2nd, 3rd, and 4th natural frequencies of the structure, along with their corresponding mode shapes, are selected as the experimental modal parameters for model updating. Because the parameters to be updated are normalized values and their true values are unknown, a sufficiently large range of [0.1, 2.5] is set for each parameter. The total iteration process is divided into 10 stages, and the changes in the mean posterior PDF of the parameters at each iteration stage are shown in Figure 10. Mean posterior PDF of the parameters to be updated at each iteration stage.
As shown in Figure 10, the initially generated values of the parameters to be updated (at stage 0) are far from the true values. However, as the number of iterations increases, the mean posterior PDF of the parameters gradually converge. To illustrate this process in more detail, one of the Markov chains from the initially generated N chains is projected onto the m1 and m2 plane. The convergence plots at selected stages are shown in Figure 11. Convergence plots of m1 and m2 samples at different stages.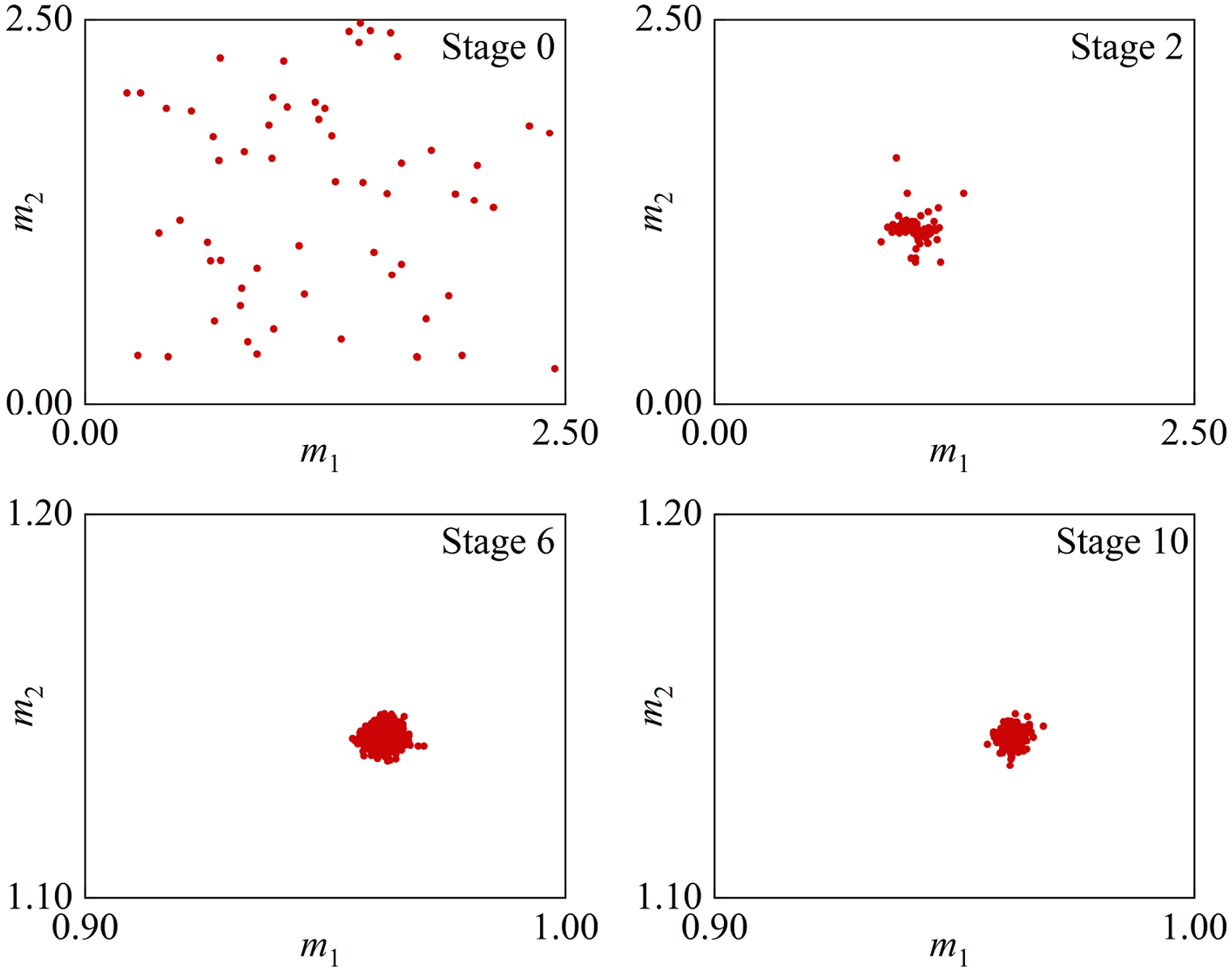
In Figure 11, stage 0 represents the 70 random samples uniformly generated within the interval [0.1, 2.5], which serves as the initial past state vectors. According to the theory discussed in sampling difference vectors from past states, the posterior samples of the parameters to be updated are obtained by continuously discarding the initial past state vectors and burn-in samples, as illustrated in stages 2, 6, and 10 in the figure. The joint and one-dimensional marginal posterior distributions of all the parameters to be updated are shown in Figure 12. Joint and one-dimensional marginal posterior distributions of the parameters to be updated.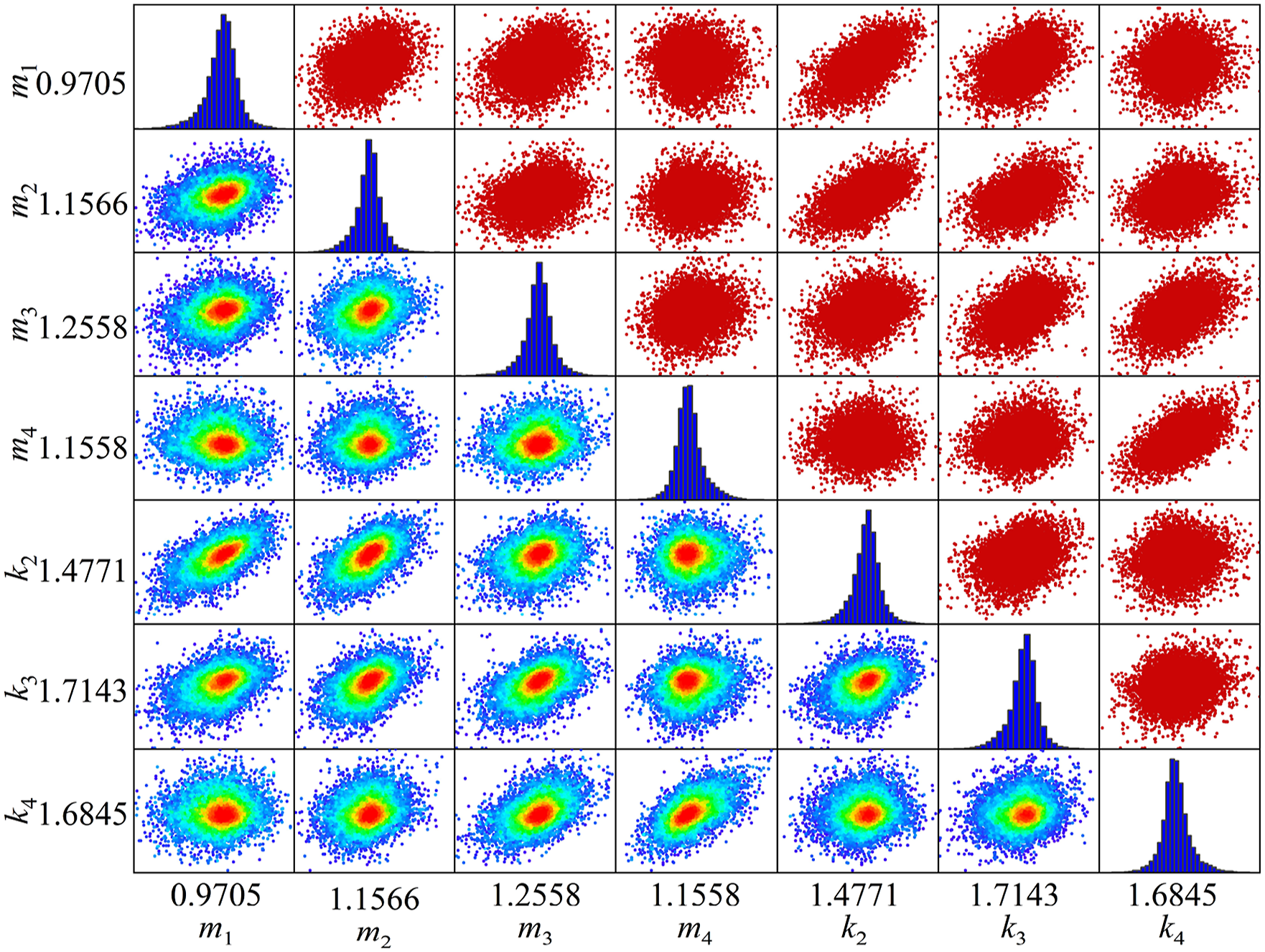
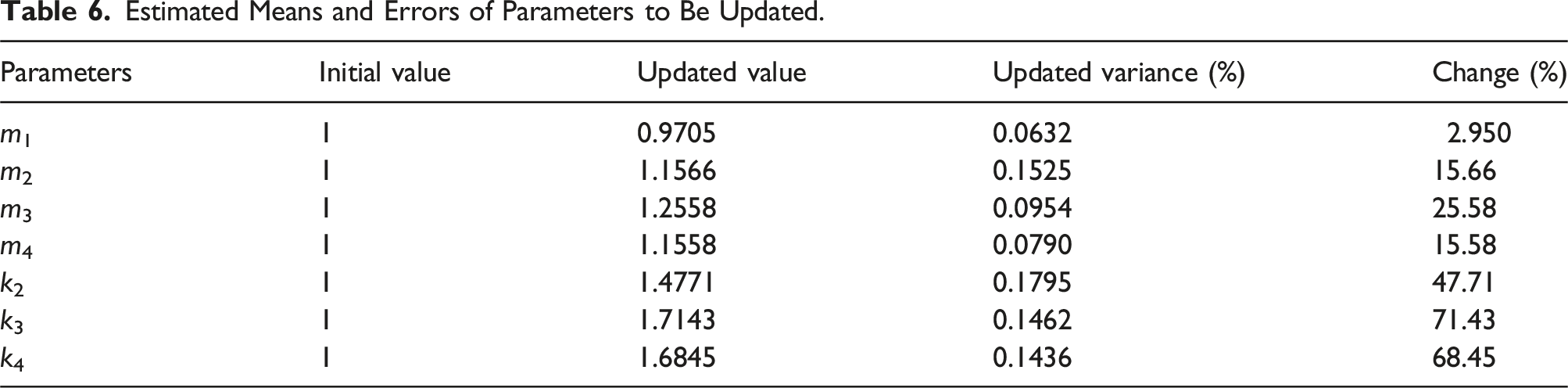
Estimated Means and Errors of Parameters to Be Updated.
Frequency Errors Before and After Updating of Three-story Frame Structure.


Normalized modal shapes of the 2nd, 3rd, and 4th modes of the three-story frame structure.
As shown in Table 7, the errors between the updated 2nd, 3rd, and 4th natural frequencies of the three-story frame structure and their experimental values are minimal, all within 0.05%. Figure 13 illustrates that while the initial mode shape curves of the 2nd, 3rd, and 4th modes deviate somewhat from the true values, the updated mode shape curves almost completely overlap with the experimental values. Both Table 7 and Figure 13 demonstrate the effectiveness of the proposed algorithm. However, the modal shape data used were identified from the reference (Dessena et al., 2024), and both the frequencies and modal shapes are inherent properties of the structure. These factors contribute to the limited reliability of the updated FEM. Therefore, to further verify the reliability of the updated FEM, a comparison is made between the experimentally measured FRF curves and the FRF calculated from the updated FEM. The FRF curves for the four measurement points of the three-story frame structure, including the initial FEM, updated FEM, and experimental structure, are shown in Figure 14. FRF curves of the three-story frame structure: (a) A1 measurement point; (b) A2 measurement point; (c) A3 measurement point; (d) A4 measurement point;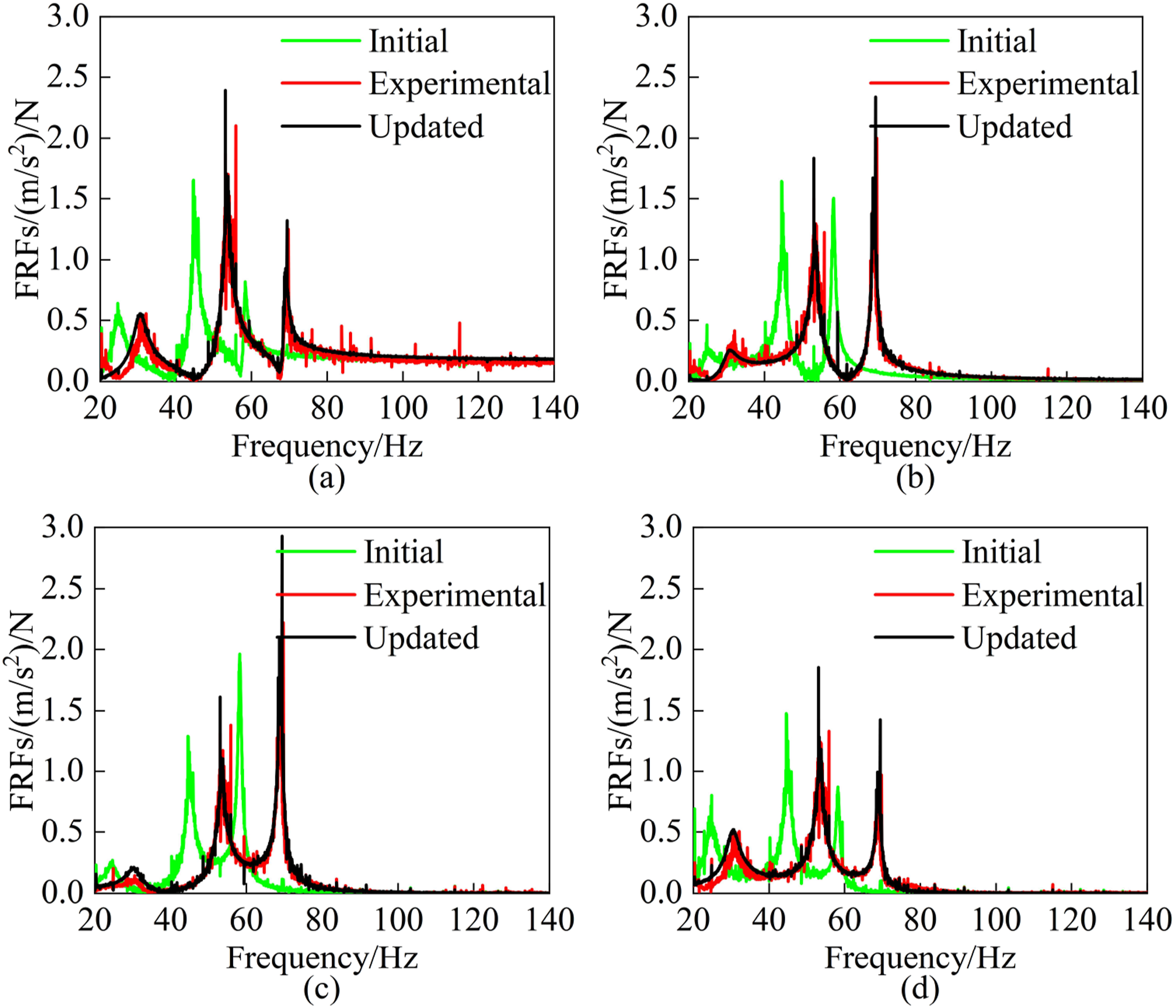
As shown in Figure 14, the FRF curves of the initial FEM significantly deviate from those of the experimental structure, indicating that the initial FEM has a limited ability to simulate the response characteristics of the experimental structure. In contrast, although the updated FEM’s FRF curve shows some deviation from the experimental structure’s FRF curve due to factors such as measurement errors, noise, model simplification, and rigid body modes, the updated FEM’s FRF curve nearly overlaps with the experimental structure’s curve compared to the initial FEM, indicating a significant improvement in the updated FEM’s ability to simulate the experimental structure. This evidence validates the accuracy of the updated FEM in terms of both the inherent structural properties and the response characteristics, proving that the proposed Bayesian model updating method achieves high updating accuracy. However, in practical engineering applications, Bayesian algorithms often encounter challenges related to computational efficiency. To demonstrate the computational efficiency of the proposed algorithm, the R
c
convergence curves: (a) Algorithm from reference (Zhang et al., 2020); (b) Proposed algorithm.
As shown in Figure 15, the improved DREAM algorithm from the reference (Zhang et al., 2020) reaches convergence at the 17,000th iteration, while the proposed algorithm reaches convergence at the 9,000th iteration. This indicates that the proposed algorithm requires 8000 fewer iterations to achieve convergence compared to the improved DREAM algorithm in the reference (Zhang et al., 2020), demonstrating that the proposed algorithm maintains a high level of computational efficiency even in the experimental example.
Conclusion
This paper addresses the issues with multi-chain MCMC methods by improving the standard DREAM algorithm and proposing a Bayesian model updating method based on multi-sampling strategy integration. The proposed algorithm is validated using a simply supported beam numerical example and a three-story frame structure experimental example, leading to the following conclusions: (1) The introduction of the Kalman-inspired distribution and sampling difference vectors from past states into the DREAM algorithm addresses the limitation on the number of parallel chains in the DREAM algorithm, thereby improving the exploration efficiency of the posterior distribution. (2) The integration of the proposed centroid update sampling strategy with other sampling strategies increases the sampling diversity among different chains in the DREAM algorithm, and accelerating the convergence process. (3) The proposed Bayesian model updating method, which integrates multiple sampling strategies, demonstrates high updating accuracy and fast convergence speed. The updated FEM shows improved capability in simulating the inherent properties and response characteristics of the experimental structure, making it suitable for use as a benchmark model in structural health monitoring.
Footnotes
Acknowledgments
The authors would like to thank the Engineering Institute at Los Alamos National Laboratory for providing the experimental data used in this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the National Natural Science Foundation of China (Grant No. 51768035) and the Natural Science Foundation of Gansu Province (Grant No. 24JRRA172).