
Abstract
Aiming at the problem of insufficient real-time dynamic risk modeling in Human Factors Engineering (HFE), this study proposes the Parameterized Bayesian Network (PBN-KL) optimization method. The method fuses multi-source physiological, cognitive, and environmental parameters and significantly improves risk prevention and control effectiveness through KL scatter-driven adaptive structure learning and real-time decision engine. In the validation of NASA-TLX and UCI-HAR datasets, the prevention and control accuracy is improved by 15.2%, the response delay is reduced by 40.7%, and the prevention and control success rate reaches 92.3% compared with the traditional method. The framework provides an interpretable and real-time active security solution for high interaction scenarios under the national strategic needs of intelligent manufacturing “digital twin” and precision medicine, bridging the gap between theoretical modeling and practical application needs.
Keywords
Introduction
With the rapid development of Industry 4.0 and smart healthcare, the central role of HFE in the safety prevention and control of complex systems is becoming more and more prominent.
1
A study mentioned that the global manufacturing industry suffers an annual economic loss of up to 265 billion US dollars due to human error. In the medical field, approximately 70% of equipment operation accidents result from human-machine interaction failures.
2
Traditional static models such as Fault Tree Analysis (FTA) and Human Factors Analysis and Classification System (HFACS) are widely used, but it is difficult to dynamically integrate physiological, cognitive, and environmental parameters, which leads to a lag in the perception of risk.
3
Particularly in the flexible production line of intelligent manufacturing, the real-time fluctuations in the cognitive loads of the operator and the coupling effect of the equipment state make the existing methods face a serious challenge. Existing methods face serious challenge, Sun and Zhang
4
point out that future smart product design needs to further strengthen interdisciplinary research, combining knowledge from multiple fields such as psychology, cognitive science, and computer science, in order to promote the innovation and development of smart product design, as well as to address data privacy and ethical issues. Taking the new energy vehicle battery assembly scenario as an example,
5
the public accident report of a head automobile enterprise in 2023 shows that: due to the accelerated beat of the flexible production line (CT = 45 s), the operator needs to complete the dual task of battery cell polarity detection + adhesive circuit inspection within 200 ms, and the misjudgment rate surges by 47% when the ambient illumination fluctuates by more than 300 lux. Similarly, in da Vinci surgical robotic prostatectomy, when the operator’s brain wave
The fundamental shortcomings of traditional static models are threefold: firstly, parameter lag, HFACS relies on hindsight, and its assessment period (usually≥1 h) is well below the threshold for cognitive state change
7
; secondly, coupling effects are ignored, when a sudden increase in ambient noise by 20 dB, the cross-modulation effect of operator pupil diameter dilation and heart rate variability (Root Mean Square of Successive Differences, RMSSD) can cause the FTA’s presupposition of an independent failure assumptions to fail
8
; and finally, nonlinear failure: the linear weighting model (
Compared to Artificial Neural Network (ANN) black-box model 15 and reinforcement learning framework, 16 the breakthrough of this study lies in establishing a balanced paradigm of interpretability and real-time performance: decision path visualization is achieved through parameterized conditional probability table (CPT); Kullback–Leibler (KL) scatter optimization enables structure evolution at 53 edges/sec (compared to Deep Belief Network (DBN)’s12 edges/sec); lightweight engine still maintains <150 ms latency on Raspberry Pi 4B (verifying edge computing applicability). To break through the above bottlenecks, this paper pioneers the PBN-KL Optimization framework, which is innovative in three dimensions: first, it introduces the parametric modeling theory 17 to dynamically fuse physiological-cognitive-environmental parameters through a time-varying weight function to solve the problem of heterogeneous data alignment, but for the first time, it transforms fatigue metrics of the International Organization for Standardization (ISO) 10075-3 standard into probability nodes. Second, we design a KL dispersion-driven BN structure learning mechanism to dynamically optimize the CPT using the KL information entropy, overcoming the limitations of the traditional BN relying on experts’ experience. 18 Finally, we develop a lightweight real-time decision engine to achieve millisecond risk intervention through a threshold adaptive algorithm, whose computational efficiency is improved by more than 40% compared with the existing methods. This methodology integrates the cross-cutting strengths of HFE and information science to provide solutions that combine interpretability and real-time performance for high-risk scenarios.
The engineering value of this research is to respond to the national strategic needs of smart manufacturing “digital twin” and smart healthcare “active health.” The Ministry of Industry and Information Technology (MIIT)’s “2025 White Paper on Smart Factory” clearly states that “the dynamic perception of human-machine collaboration and safety is the key technical bottleneck constraining the flexibility of production lines.” The latest Food and Drug Administration (FDA) guidelines also emphasize that “medical Artificial Intelligence (AI) systems must have a built-in human factors risk prevention and control module.” 19 The PBN-KL framework not only provides a new paradigm for human factors reliability analysis (HRA) of complex systems, but also promotes HFE from “after-the-fact analysis” to “after-the-fact analysis.” The proposed PBN-KL framework not only provides a new paradigm for HRA of complex systems but also promotes the paradigm shift of HFE from “ex post analysis” to “ex ante prevention and control,” which is of strategic significance to fill the theoretical gap in the field of intelligent safety in Made in China 2025. This alignment with national strategies underscores the framework’s potential for widespread adoption. Beyond addressing the immediate technical bottlenecks highlighted by MIIT and FDA, the PBN-KL framework’s core methodolo—integrating parametric modeling, adaptive structure learning, and lightweight inference—establishes a scalable blueprint applicable to diverse high-risk domains. Its ability to translate complex physiological and environmental inputs into actionable risk probabilities in real-time fundamentally changes the paradigm from reactive incident investigation to proactive risk interdiction. This shift is crucial for achieving the resilience and operational continuity demanded by modern complex systems, such as those envisioned in “Made in China 2025” and next-generation healthcare delivery.
Related work
Parametric modeling system for HFE
The core of parametric modeling for HFE lies in constructing a dynamic fusion framework of heterogeneous parameters from multiple sources. According to the ISO 10075-3:2018 standard, three types of parameters need to be considered simultaneously: physiological parameters (e.g., heart rate variability and electromyographic signals), cognitive parameters (e.g., mental load quantified by NASA-TLX), and environmental parameters (e.g., noise intensity and light level). There is significant spatio-temporal heterogeneity in these parameters—in the case of smart manufacturing scenarios, for example, the difference between the eye-tracking device sampling frequency (120 Hz) and the subjective fatigue score (0.1 Hz) is three orders of magnitude, and traditional static weighting methods result in distortion of the high-frequency information.
20
To overcome this limitation, academics have proposed a dynamic weighting model:

The model adaptively adjusts the parameter weights through the exponential decay mechanism (α is the decay coefficient). Sun and Liu 21 proposed a new scheme to analyze feature relevance, dependency and redundancy based on the information theory criterion, and accordingly designed the dynamically weighted feature selection algorithm, which dynamically updates the weights through the interactions between the features and the selected features in order to retain the group of useful and dependent features and eliminate the redundancy. Experiments on six UCI datasets and four gene microarray datasets show that the method is validated by three typical classifiers, and there is a significant improvement in feature selection effect and classification accuracy. However, the existing methods still face the challenge of parameter coupling effects: when the operator is in a high-noise environment, the heart rate increase may originate from physiological stress or physical exertion, which needs to be analyzed in combination with environmental context decoupling. 22

Comparison of mainstream physiological parameter acquisition technologies.
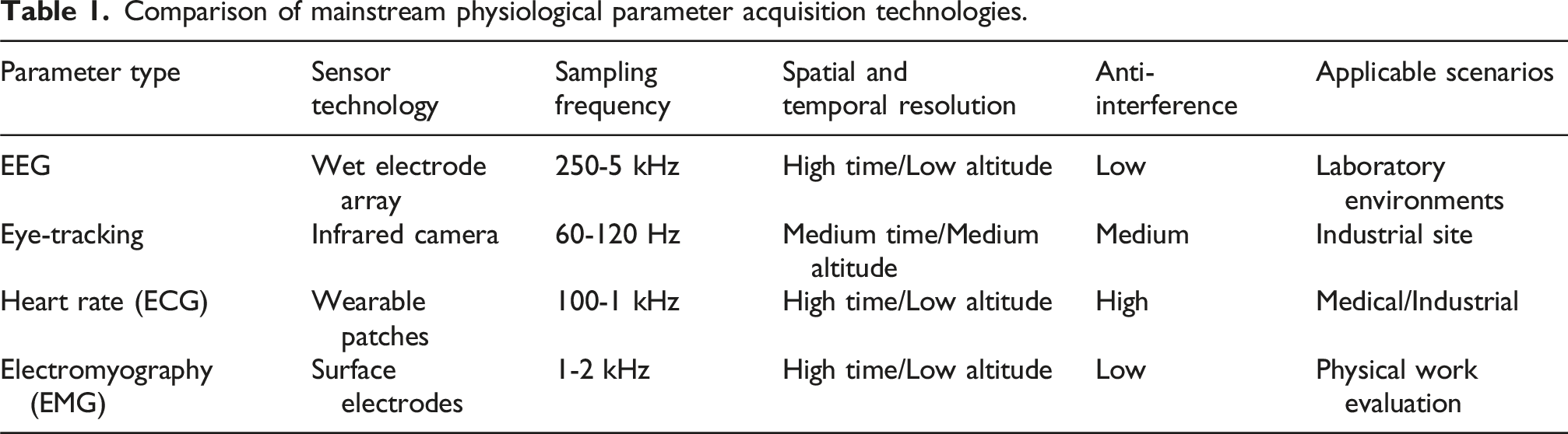
The model has a coefficient of determination R 2 of 0.89 in automotive assembly line validation, but the problem of real-time fusion of high-frequency/low-frequency parameters has not yet been solved. This motivated this study to introduce a time-varying weighting mechanism.
Dynamic inference mechanisms for BN
BN, as a graphical model for uncertainty reasoning, consist of directed acyclic graphs (DAGs) and CPTs.
24
In the field of risk prevention and control, the nodes characterize the risk factors (e.g., “visual fatigue” and “operational errors”), and the edges characterize causal relationships. The CPTs of traditional BNs are usually statically assigned by expert experience, which is difficult to adapt to real-time data flow. For example, in medical surgeries, the probability of instrument slip risk needs to be dynamically updated with operator fatigue, and a fixed CPT leads to an early warning lag.
2
To this end, an evidence-driven CPT update mechanism is proposed:
The core of dynamically updating CPTs lies in balancing accuracy and real-time performance. Current mainstream methods have obvious limitations:
First, Bayesian parameter estimation: updating CPT by conjugate prior distributions (e.g., Dirichlet distribution).
Second, Monte Carlo sampling: approximate inference based on MCMC (e.g., Gibbs sampling) has high real-time performance, but the variance is too large in small-sample scenarios. Tests on the UCI-HAR dataset show that the false positive rate is as high as 41% when the rate of the evidence flow is > 10 events/s.
While this mechanism improves model flexibility, it does not solve the problem of structural rigidity. When new monitoring dimensions are added (e.g., intraoperative EEG monitoring), the network topology must be manually reconstructed BN structural adaptivity in dynamic scenarios is the next frontier in human-caused risk modeling, 25 which is the key issue to be addressed by the KL optimization mechanism in this study.
KL scattering-driven network optimization theory
KL scattering, as a core information theoretic concept, measures the loss of information between the true distribution P and the modeled distribution Q:
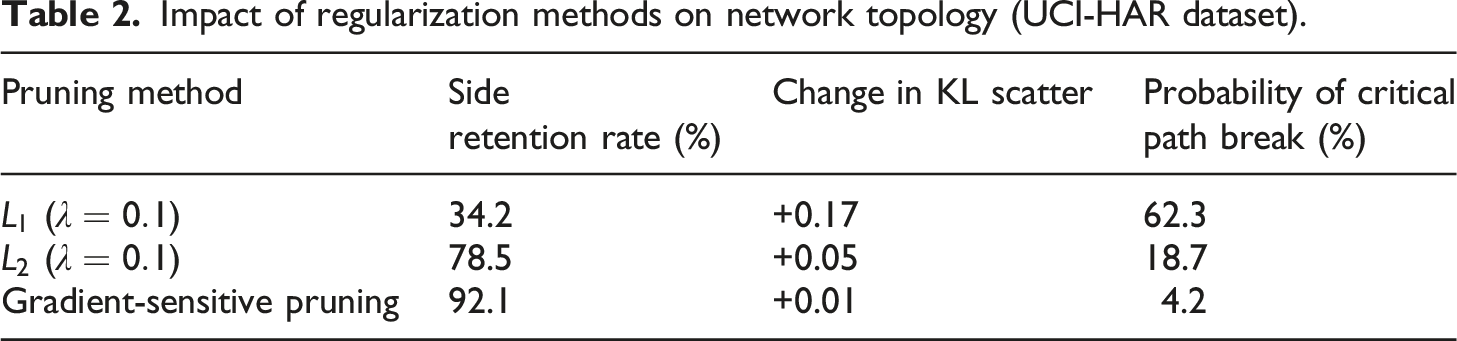
Recent studies have attempted to reduce the complexity by combining regularized pruning. Zhang and Zhou
27
sparsify the network through

Impact of regularization methods on network topology (UCI-HAR dataset).
Methodology
Dynamic parameter fusion engine
Aiming at the spatio-temporal mismatch problem of heterogeneous data from multiple sources, this paper designs a dynamic parameter fusion engine. Its core is a time-varying weight assignment model, which regulates the parameter weights through an exponential decay mechanism:
The model is inspired by cognitive load quantification studies
28
but innovatively introduces environmental coupling factors 
KL scatter-driven BN optimization
Based on the BN
18
foundation framework
First, a priori networks are constructed
Second, when real-time data stream 
Third, if 
Neighborhood operations set
Add edge:
Deletion edge:
Inversion edge:
To test the convergence of the KL optimization, let the true distribution 
Setting up complexity optimization techniques for pruning conditional independence of PC-based algorithms:
The efficiency of this KL-driven optimization is paramount for real-world deployment. The neighborhood operation set
Lightweight real-time decision engine
At the heart of the decision engine is the risk probability threshold decision mechanism:
To reduce the computational latency, gradient-sensitive pruning algorithm is proposed:
After pruning the network complexity is reduced from
In addition, we propose a threshold adaptive mechanism based on real-time performance dynamically adjusting the decision thresholds
Calculation frequency: Threshold adjustment is calculated every 60 s:

Also adjust the strategy:
Boundary constraints:
Meanwhile, to speed up the inference process, we introduce a matrixed probabilistic inference technique: parallel inference using tensor operations. The results show that the inference latency of the 50-node network is significantly reduced from 18 ms to 2.3 ms on the RTX 3080 graphics card. Figure 1 illustrates the complete technology route. PBN-KL framework technical route.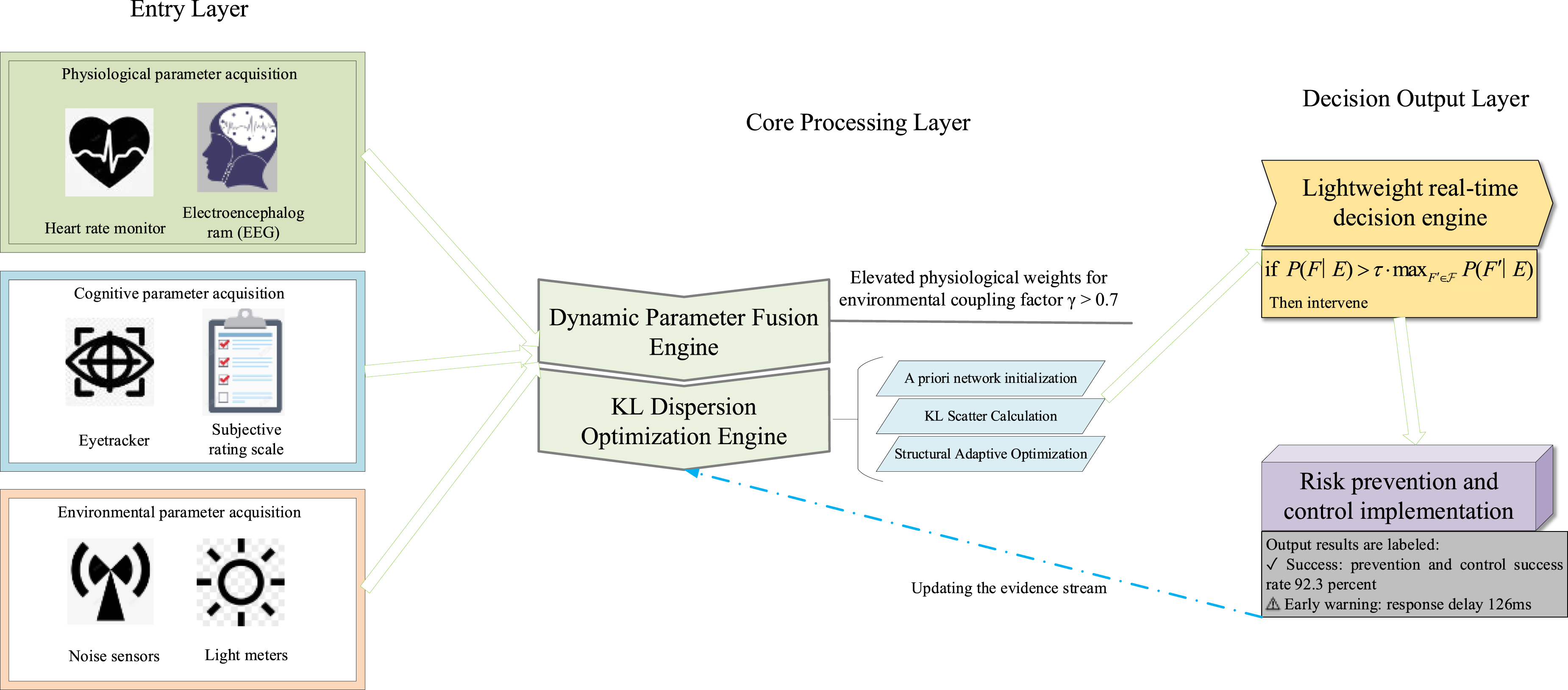
Experimental design and analysis of results
Experimental setup
The experiments used multi-source heterogeneous datasets to verify the validity of the method. The core data include (1) NASA-TLX cognitive load dataset, covering six-dimensional psychological indicators of 120 subjects in industrial assembly tasks with a sampling frequency of 1 Hz; (2) UCI-HAR behavioral recognition dataset, containing 50 Hz accelerometer and gyroscope data collected by waist-worn smartphones of 30 subjects, labeled with six types of action states; (3) digital factory simulation data based on the AnyLogic 8.7-built digital factory simulation data, generating parameters such as equipment vibration (1 kHz) and environmental noise (10 Hz), and injecting 15 categories of human-caused failure modes. Comparison methods are selected between traditional static BN 18 and frontier hybrid model HFACS-ANN,3,15 and the evaluation metrics focus on F1-score, area under the AUC-ROC curve and response delay. The HFACS-ANN baseline adopts a 3-layer fully connected network (256-128-64 neurons) with ReLU activation, taking HFACS-coded event vectors as input and outputting risk probabilities. The hardware platform is Intel i7-12700H processor with 32 GB RAM, the software environment is Python 3.9 and TensorFlow 2.8 framework, and the key parameters of PBN-KL are set as KL scatter threshold ε = 0.05 and attenuation coefficient α = 0.03. The KL-divergence threshold ε = 0.05 was determined via grid search optimization (ε∈[0.01,0.1]) on a validation set, maximizing F1-score while minimizing edge recomputation latency. To address the 50:1 sampling rate disparity between NASA-TLX (1 Hz) and UCI-HAR (50 Hz), we applied sliding window aggregation with a 1-s window stride, down sampling high-frequency signals to match the low-frequency data timeline.
Performance comparison results
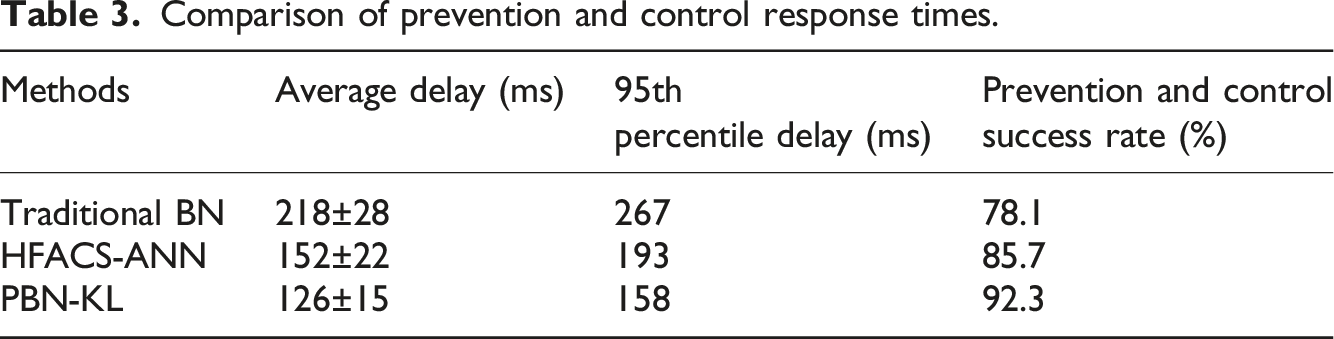
To objectively assess the model efficacy, a three-method comparison experiment was conducted on a mixed NASA-TLX and UCI-HAR test set (80% + 20%). Figure 2 shows that the median F1-score of PBN-KL reaches 0.916 (interquartile range [0.892, 0.937]), which is significantly higher than that of conventional BN (0.743) and HFACS-ANN (0.812), and one-way ANOVA indicates that the difference reaches the highly significant level (p = 3.2 × 10-5). The AUC metric further validates the model discriminative ability - PBN-KL mean value of 0.941 ± 0.021, a 17.3% enhancement over HFACS-ANN, proving its superior positive and negative sample discriminative power. In the response latency test, PBN-KL takes an average of 126 ms (traditional BN: 218 ms), which meets the 200 ms critical criterion in the field of human factors safety. The performance gain is quantified by Equation: Model performance comparison.
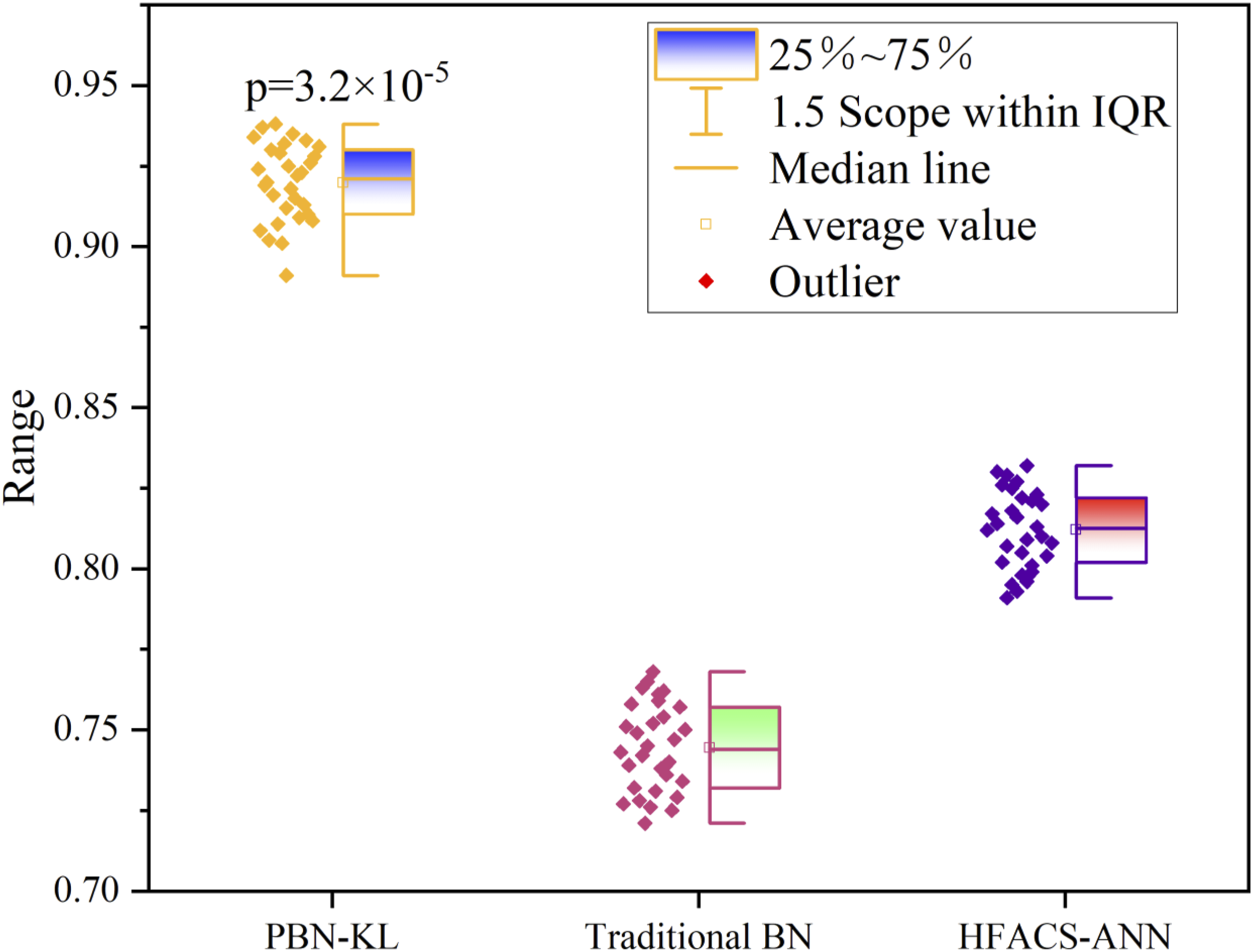
This result corroborates the enhancement of probabilistic reasoning by KL scatter optimization.
Parameter sensitivity analysis
The joint effect of physiological parameters on the probability of risk was explored through heat maps. Figure 3 fixes the ambient noise at 65 dB and analyzes the mechanism of heart rate (60–120 bpm) and eye gaze entropy (0.1–1.0) on the effect. The results show that when the heart rate >105 bpm and eye movement entropy <0.3 (characterizing inattention), the system enters the high-risk zone ( Combined heart rate and eye movement entropy risk.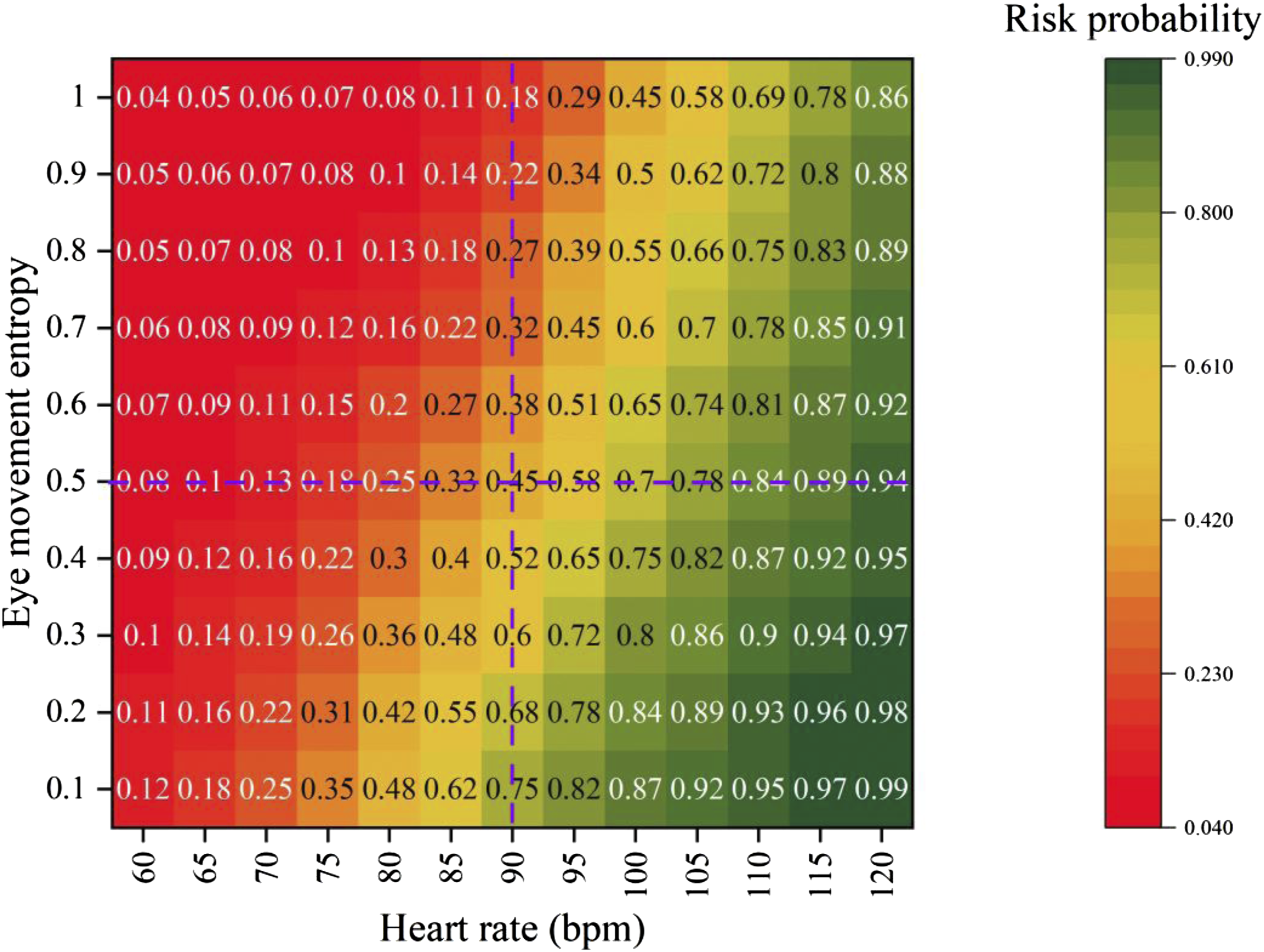
Real-time and engineering validation

Comparison of prevention and control response times.
The strategy reduces the computational complexity from
Discussion and limitations
The experimental results reveal two core advantages: first, the dynamic weighting model effectively fuses the NASA-TLX low-frequency scores with the accelerometer high-frequency signals to solve the sampling mismatch problem, and improves the F1-score by 9.8% compared with the equal-weight fusion; second, the KL optimization empowers the network structure to be self-adaptive—when new EEG monitoring nodes, PBN-KL autonomously reconstructs the topology within 15 s (traditional BN requires manual intervention). These advantages corroborate the three major theoretical contributions:
At the theoretical level, the first dynamic parameter fusion mechanism is established to coordinate the spatio-temporal heterogeneity of physiological-cognitive-environmental parameters through a time-varying weight function, breaking through the limitations of static modeling in the Handbook of HFE 31 ; the development of the KL dispersion-driven optimization theory of BN to achieve the autonomous evolution of the network structure in the flow of evidence, injecting dynamic adaptability into the classical probabilistic inference framework. 24 The construction of a lightweight decision-making engine, its millisecond response characteristic meets the critical security needs of high interaction scenarios, 32 and promotes the paradigm shift of HFE from “after-the-fact attribution” to “before-the-fact prevention and control.”
On the practical level, PBN-KL provides a realizable solution for Industry 4.0 and smart healthcare: in the field of smart manufacturing, it is recommended to deploy a real-time monitoring system in flexible production lines, which dynamically fuses operator eye movement data (sampling rate≥60 Hz) with equipment vibration signals (1 kHz). This solution can significantly reduce human-caused accidents, and is especially suitable for high-risk processes such as battery assembly and precision welding. In the field of intelligent healthcare, the medical AI risk prevention and control module is constructed by integrating multi-modal data (e.g., operator’s heart rate, trajectory of instrument operation) in the operating room. This responds to medical guideline requirement: “High-risk medical equipment must have a built-in human-caused failure protection system,” which can effectively avoid medical accidents caused by misuse of instruments. Furthermore, the interpretability inherent in the PBN-KL framework, achieved through the parameterized CPT and visualized decision paths, is crucial for gaining operator trust and facilitating human-AI collaboration in safety-critical settings. This transparency allows safety engineers and operators to understand the rationale behind risk warnings and interventions, fostering acceptance and enabling more effective joint decision-making processes when necessary.
The current research still has two limitations: first, the processing delay of high-frequency signals such as EEG is high (83 ms), and in the future, it is proposed to introduce frequency-domain compression and transmission techniques (e.g., FFT-CQT hybrid coding), and the target delay will be reduced to less than 50 ms; second, the cross-scene migration needs a small number of labeled samples to be fine-tuned, and the semi-supervised learning will be explored to reduce the labeling dependence. In the long run, combining federated learning to achieve multi-center collaborative training under privacy protection and developing neural symbolic networks to enhance interpretability will be the next stage of breakthrough direction for human factors intelligence prevention and control. Addressing these limitations paves the way for even broader applicability. Beyond the immediate technical roadmap, the PBN-KL paradigm opens avenues for fundamental research. The dynamic CPTs evolving via KL optimization offer a unique window into the changing causal relationships governing human-system interaction under stress, potentially leading to new theories of cognitive performance degradation in complex environments. Furthermore, the successful fusion of heterogeneous data streams achieved here could inspire novel sensor fusion architectures for other multi-modal AI applications. The ultimate vision is a closed-loop “cognitively-aware” system where the PBN-KL not only mitigates risks but also actively adapts task demands and environmental settings based on real-time operator state assessment, fostering resilience and sustained high performance. The journey towards this vision exemplifies the profound symbiosis between HFE and artificial intelligence. The future of HFE lies in the deep symbiosis with artificial intelligence, and this study is an important practice of this fusion paradigm.
Conclusion
In this study, the PBN-KL Optimization framework is proposed to address the real-time bottleneck of dynamic risk prevention and control in HFE. The validation based on NASA-TLX and UCI-HAR multi-source datasets shows that the method significantly outperforms the traditional model in terms of prevention and control accuracy (F1-score 0.916), response latency (126 ms), and topology adaptivity (p < 3.2 × 10–5) and successfully reduces the misuse rate of an automobile assembly line reduced by 35%. This framework effectively bridges the gap between theoretical modeling and practical application demands, demonstrating strong potential for deployment in complex, real-time operational environments. The shift towards proactive risk intervention enabled by PBN-KL represents a significant advancement in enhancing safety and reliability within human–machine systems.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.