
Abstract
This study focuses on the design of behavioural mechanisms for a hybrid informed adaptive envelope. Based on a full-scale experimental demonstrator, including a material responsive and a sensor–processing–actuation adaptive system, quantitative and qualitative methods are applied to identify, describe and study behavioural modes of the adaptive envelope. Through sensor data values and observations, the study finds that the adaptive response patterns are best based on subjective, human-mapped sensations, rather than prescribed environmental comfort, numeric-based sensor values. Those adaptive response patterns should account for change in tempi of the environment, occupier and envelope to establish advanced cause and effect relations, beyond generic thermal comfort performance metrics.
Introduction
This research approaches hybrid adaptive envelopes and their inherent dynamics from three points of enquiry as follows: (1) a material-based perspective, through the development and study of thermal responsive material composites, (2) their respective assembly systems, and (3) environmental-driven behavioural studies, through an embedded microclimatic sensor system paired with occupancy behaviour analysis with a decision-taking study of the applied membrane acting on the information derived from both the material and environmental-occupancy studies. The focus of this article is the informed behavioural processes, from material behaviour to occupancy behaviour, merging quantitative and qualitative environmental information through development of material dynamics paired with microprocessor-based sensor systems and perception psychologist field observations.
The research is of particular interest where occupied environments are non-static. In architecture, this means practically all buildings, as the natural environment fluctuates with seasons and humans are in a constant state of thermal and behavioural adjustment. 1 Focusing on adaptive building membranes, positioned at the boundary between the external and internal conditions, presents a series of unique conditions and possibilities. First, the membrane is potentially exposed to available solar energy, which can drive membrane actuation through exergy processes. 2 , 3 Second, it defines the transfer of energy between two conditions that are likely to have the largest difference in thermal properties influencing humans and building energy budgets. Third, it articulates a central aspect of a building expression, namely, the building envelope, being visual from inside and outside.
The previous solutions of auxiliary adaptive envelopes are many if simple fixed louvre-based systems are included in the state-of-art framework. When considering material-driven actuation of responsive building envelopes, studies by Reichert and colleagues 4 , 5 , Correa et al. 6 and Foged and Pasold 7 , 8 need mentioning. These studies have been focused on the material-geometric bending performance, operation and effects of the material system alone, where responsive behaviour is limited to the intrinsic movement capacities of the material assembly in response to changing thermal and humidity microclimatic conditions. Also, these studies are commonly tested and assessed on singular element level, not at larger arrays at the spatial–environmental scale, and hence, also not in relation to a human perceived quantitative–qualitative study.
The basis for potential solutions is a hybrid behavioural system, both in terms of the membrane material make-up and the information that the membrane acts on. On the first aspect, the material-driven actuation of the developed multi-material composites is coupled with a sensor-driven actuation of membrane panels, based on a processing unit, which include decision-taking procedures in response to incoming sensor information. Systems based on processor feedback for mechanical actuation are previously studied among others byFox and Kemp 9 in academia and have been implemented in many buildings as activated shading systems for more than a decade. 10 , 11 With the focus on behavioural aspects, observations of a perception psychologist combined with architectural researchers’ observations of the occupancy behaviour are included, providing a combined qualitative and quantitative basis for designing and informing the behavioural patterns of the envelope and how to act on sensor-based registered environmental information.
The article presents the adaptive auxiliary membrane, based on novel material composites for exergy-based thermal-driven actuation, with a particular focus on the membrane sensor–processing–actuation system, environmental information gathering method and the final, full-scale field applied adaptive system installed in the Copenhagen School of Design and Technology Library. Finally, the article discusses the idea and integration of combined qualitative/quantitative information for the responsive behaviour design in future studies.
Methods, models and materials
With the focus of this study placed on the behavioural aspects of the adaptive auxiliary membrane, the methods within this specific inquiry include an experimental setup including a full-scale demonstrator with an embedded sensor logging system, developed for the project, a field observation and comparative analysis between the gathered information. The project was installed onsite twice, with a period of 3 weeks in January and 2 weeks in March 2019. The reason for a repeated installation was to understand and identify issues for the development of the material and behavioural system in the first period to then re-install for further investigation of the behavioural mechanisms. In addition, the general study also includes experimental design research through material studies combining materials and investigating layer bonding adhesives.
Quantitative computational studies
The sensor system is structured in two clusters (see Figure 1) with two sensor nodes in each cluster. Each node includes temperature (°C), relative humidity (%) and light (Lux) registration. Nodes located close to working tables additionally include sound (dB), motion (PIR) and CO2 (PPM) sensors. The nodes are hung from the ceiling (see Figure 2), over study tables in the library. To account for the height difference, which changes the temperature level, test measurements were done at the tables and compared to the sensors hung from the ceiling. These showed less than 2% deviation, which is within the precision tolerance of the sensors, indicating an insignificant deviation by the distance from the perceived temperature at occupants’ positions to the ceiling hung sensors.
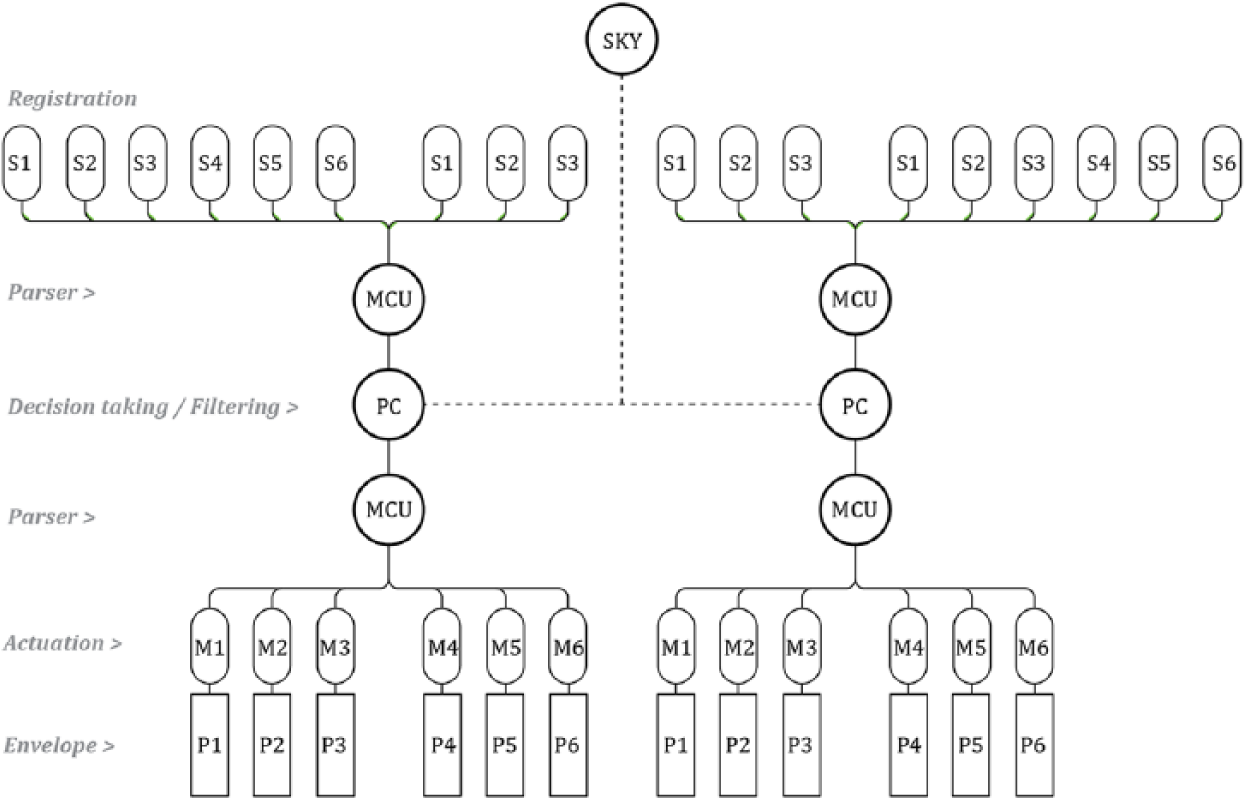
Schematics of the sensor processing–actuation system, including environmental sensors (S1, S2, . . .), Arduino microprocessors (MCU), PCs, IOT connection (SKY) stepper-motor actuation (M1, M2, . . .) and membrane panels (P1, P2, . . .).

Screenshot of developed behavioural design interface including data streams, data filtering options and information sent to the Arduino microprocessors for motor control.
The clusters gather numerical information through an Arduino processing unit at each node and transfer the information further to one laptop computer. A bespoke dedicated software, including an operation-based frontend interface (see Figure 2) for decision-taking processes is placed in the personal computer (PC), which sends information to a series of Arduino processing units (microcontroller (MCU)) that pass information and control commands onto the stepper motors actuating the rotational movement of each panel rotating the composite membrane frame. The developed software includes a series of variables that can dynamically change while the system is running, including but is not limited to sensor update frequency, sensor data minimum/maximum clipping, averaging values, accumulated values and logging streams. The default environmental sensor information process line of the first setup follows an information frequency from the sensors every 2 s. Then, data are continuously trimmed for values outside a specified value domain, to avoid error logging, caused by a sensor value error, which can be caused by the sensor itself and signal disturbance from sensor to microprocessor. Afterwards, data are smoothened by averaging values from the custom smoothing interval, set to 5 s in the presented studies. In the second setup of the demonstrator onsite, the software was developed to log, filter and respond to accumulated peak values, in response to both sensor values and behavioural registrations of occupants. This aspect is further described in section ‘Design experimentation’. In addition, the system ecology is locally embedded, but connected to the ‘sky’ as an Internet of Things (IOT) implementation, where designers/operators can reconfigure the system offsite.
Qualitative observational studies
To advance the development and integration of the processor-based behavioural system, a perception psychologist is, in parallel to the sensor data logging, making observations in the library. The observations include behavioural actions and qualitative descriptions related to interactions between people, such as ‘concentrated atmosphere’, ‘loud’, ‘lively atmosphere’, ‘library atmosphere’ and so on. This ties relations between sensed environmental aspects and occupancy behaviour with the numeric registration, which advance and inform the actuation of the membrane in response to occupancy perception of the membrane and space. The communication to the architectural researchers is verbal and through transcriptions that are non-numerical, based on perception psychological assessment.
Material studies
Material studies of the developed membrane composite cannot be classified as quantitative nor qualitative alone. Rather, numeric performance and perceived quality of the membrane tectonic are assessed together, with the bi-material layering and bonding studies being measured in millimetre deflection performance and visual reading of responsive behaviour and the expressive characteristics of the architectural envelope through continuous bending geometries. Hence, the material studies are based on a hybrid design method of computational simulation studies of thermal-responsive elements with material prototype testing to enable the understanding of subtle material performances, such as perceived light translucency and tactility and utility concerns such as delamination of layers at high bending ratios and internal strains due to structural loads acting through the non-bending composite connections. In specific, nearly 200 materials in four groups of metals, plastics, wood and (other) organic materials were computed through a brute force combinatorial process in MS Excel and Rhino Grasshopper, providing a mapping of the various composites bending capacities as bi-material elements. Data for this study were extracted from the CES Edupack material database and structured for the variables: thermal expansion coefficient, Young’s modulus (material elasticity) and available thickness/dimensions. The ranking of computed composites was then based on maximum deflection by 20°C variation from set point, which is the temperature for which the materials are joined into a composite material, that is, the temperature where the composite is in a planar state. Three material investigation tracks were then formed as follows: (1) the study of bonding methods between thermally expanding layers to avoid delamination of layers when changing form causing shear forces to increase within the composite, (2) the radiant temperature effect of colouration by exposing a select group of materials in sunlight and registering the surface temperature increase as a function of solar radiation alone and (3) the inducement of heat between layers through a wire with electric current, further stimulating the temperature change in the composites beyond the thermal variation provided by the solar radiation.
These studies were conducted in a selected group of 10 materials chosen for bending and bonding physical testing, resulting in the preference of an oak–polyethylene composite to be further advanced for full-scale demonstrator construction after design experimentation, see below. A full account focused only on the extensive material studies is reported in an associated publication. 12
Design experimentation
Experimental environment
With the aim to implement, explore, understand and develop the adaptive membrane beyond laboratory conditions, an experimental onsite environment was chosen based on the existing building façade being largely based on glass, exposed to sunlight, a ceiling height which would allow a tall installation, enabling the possibility for occupants to maintain a view to the outside, a larger and more diverse group of occupants, who would both stay for long enough periods to create ‘relations’ to the membrane, but also short enough time to enable a changing group of people, thus an increased and diversified occupancy response to the installation. In addition to above, the chosen library matching these criteria’s featured spatial sections, where people were located in groupings, which aided the location of sensors to ensure correct spatial tracking, such as the sensitivity mapping of motion and sound sensors in the aforementioned sensor nodes (Figures 3 and 4). People were thus located in proximity to the membrane, with sensor nodes hanging above the tables, allowing correlation between sensor data/location to specific membrane part actuation. The configuration and use of the space as a library also allowed two occupancy conditions, sitting by tables for longer periods and movement between tables and in/out the space in shorter time frames. This was intended to aid the understanding of people’s relation to the movement of the membrane, as longer periods of low occupant movement by the tables would contrast the movement of the membrane. In an environment with constant occupancy flux, such as train stations and foyer spaces, movements of the membrane may have just been part of the existing spatial flux through short-term spatial presence of occupants and therefore causing limited exposure time between occupant and adaptive behaviour.

Observation studies with the aim to detect perceived atmospheric changes and membrane-occupancy dynamics. Psychologist is located in bottom left corner of the image, with the occupants close to the membrane and the environmental sensors directly above them.

Sensors and Arduinos mounted from ceiling (top left) in concealed white tubes to reduce interference with human perception of space and awareness of sensor registration. The sensor node is, similar to the electricity cable and sockets (centre), also hung from the ceiling, thereby reducing the awareness of the sensors by occupants.
Tectonics of the envelope
The material-geometric development of the oak–polyethylene membrane is directly related to the fabrication technologies employed (see Figure 5) and is here described in relation to the focus of the thermal and behavioural control system. The membrane layer constructed of oak–polyethylene layers with varying material properties, which create the bending as a function of temperature variations, operate silently, without mechanical or electrical stimuli. The reaction time of the composite from planar to maximum bending is, depending on solar radiation intensity and space ambient temperature, approximately 5 min. This means that subtle temperature changes in the environment can be accounted for and acted to in response. However, sudden human behavioural changes, such as occupant movement and sound making, has no direct correlation with the thermal-material-responsive membrane articulation. Hence, as a behavioural adaptive envelope, more frequent reactions and additional factor registrations, such as sound and motion sensors, with high sensitivity are necessary.

The tectonics of the membrane is based on a developed oak–polyethylene composite, bound by a non-insulating double-sided adhesive and cut-fabricated using a 1.5-mm drill head mounted in a ZUND flatbed computer numerical controlled (CNC) machine.
To integrate such environmental–behavioural possibilities, the temperature-stimulated composite is mounted on an L-frame, with a height of 2000 mm and varying widths of 800–1200 mm to suit the existing windows, which is hosted in a top and bottom joint (see Figure 6) that interlocks the L-frame, when mounted on the window pane. The dimensions of the panels and the reasons for not mounting the membrane across the whole window area are threefold. One related to the performance of the material system, second related to the possibility to locally rotate the panels and the third being the performance of the spatial use. The host panel should be large enough to accommodate an array of material responsive elements, which was found to perform best between lengths of 100–500 mm due to factors of deflection performance and self-weight influence on deflection. The narrower the panels in the horizontal direction, the higher the resolution of the membrane to locally rotate, but also the greater the amount of singular motors, which would mean increased system complexity and fabrication costs. Larger vertical dimension of the panels would obstruct view out through the space when occupants were seated in the library, which would have created a binary condition of either being an open or enclosed space, rather than the membrane mediating between environments, without losing visual outdoor contact even if the membrane would be ‘closed’. Due to the solar vector, mounting the membrane in the top part of the window retained the ability to control light and glare distribution, while offering visual contact through the building envelope when seated. Hence, the membrane regulates the sunlight falling into the space while maintaining the possibility to view out, thereby not imposing conflicting interests if view is desired outward, while sunlight should be moderated inward.
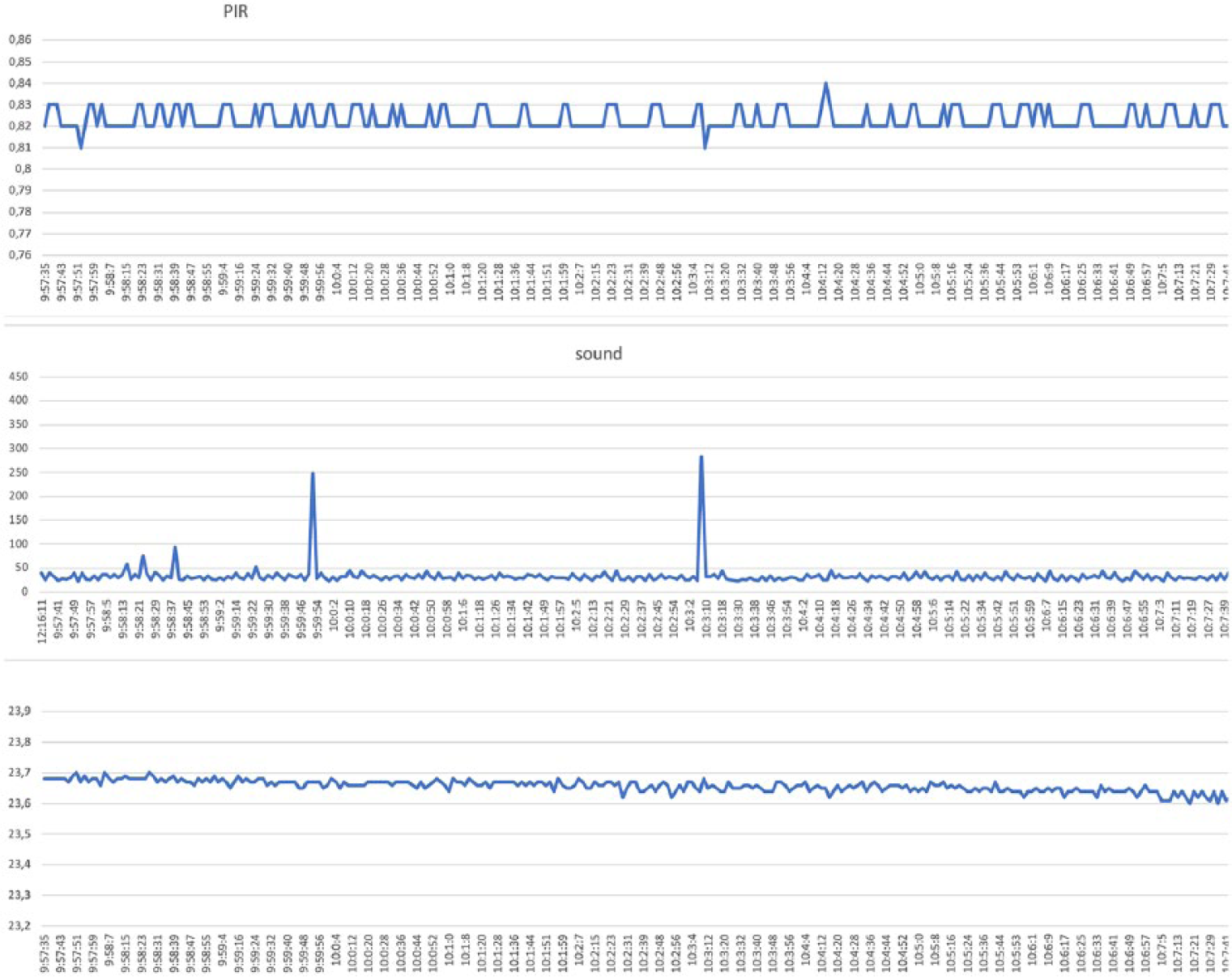
Ten-minute period, two second data points, graphs of motion, sound and temperature data plots. Motion (top) responds to movements within approximately 2 m in diameter, sound (centre) registers ambiently and temperature (bottom) registers locally above occupants. Temperature values change less than 0.2°C over 10 min, motion detection is stable on/off and sound has irregular peak events. The high sound peaks are clipped away, as these are out of scale (due to hardware errors) and lower peaks are used to assess sound environment as loud or not.
The joints were developed in oak, to take use of the material fibre strength allowing the making and operation of the complex geometry, which also host the plastic–rubber suction cup. The rubber, besides creating a vacuum, structural connection, against the glass, limits the amount of vibrations transferred from the integrated stepper motor (Nema 17) to the window, which otherwise would cause the large glass plane to vibrate and produce noise. In addition, experiments with various motor speeds were tested to match intended membrane behaviour reaction time, open and closing the membrane below 5 s. Also, decibel levels of the moving membrane panels were measured at occupancy positions during motor speed testing, with test periods of 30 s. From this process, decibel peaks were reduced from 51 to 26 dB, from ‘low conversation’ to ‘whisper in library’ sound level.
Feedback system and decision-taking processes
Using the sensor–processing–actuator system shown in Figure 1, studies were conducted to understand the sensor data stream in relation to standard indoor environmental values, such as 60 dB for conversation, 22°C for temperature comfort sensations, 300 Lux for lighting conditions and 1000 PPM of CO2 as threshold. With a mechanically climatized site, temperature, humidity and CO2 maintained relative stable values, and all close to the recommended indoor parameters. More significantly, motion and sound fluctuated greatly, and in particular sound pressure values were registered to flux within short time frames. Experiments with data clipping, filtering and processing of the sound data stream by averaging values across a time period, accumulating and counting peak values across a time period and direct response to singular events were studied.
All these studies included threshold values, with segmented values into three states, matching three motor-actuated membrane rotation positions, namely 0° (planar with window, closed), 45° (partially open) and 90° (perpendicular to window, open). During the two setup periods described earlier, three different sensor–processing–actuation modes were conducted:
Envelope runs with direct response to singular sensor value events.
(First 3 weeks of studies, setup 1).
Envelope runs with the perception psychologist acting as environmental sensor, engaging the actuation, through direct control with the feedback and actuation system, when she felt a perceived environmental change.
(First 2 days of the last 2 weeks, setup 2).
Membrane runs with response patterns that were based on the actuation events from 2. Hence, a form of low-dataset-level system learning through human perception of the environment and the engaged reaction patterns thereof embedded into the computational response system.
(During the remaining period of the last 2 weeks, setup 1).
When running the membrane with direct response patterns, mode 1, a direct relation between the occupier and the adaptive architecture is detected. The reason is that a person in the space immediately detects change in the envelope when a loud noise is made. This gives good cause-effect understanding by an occupant, to how the envelope reacts, but it also implants the consequence of an envelope which is almost always in motion, due to the constant registration of sound and motion flux in the space. This is also the case for sounds that potentially are generated in a distance from the sensors, as sound source proximity is not accounted for, see Figure 7.

The custom-designed oak joints are milled through a CNC-manufactured process allowing low fabrication tolerances to ensure the correct mounting of both suction cup and stepper motor (a). The membrane regulates the sunlight falling into the space while maintaining the possibility to view out when seated, thereby not imposing conflicting interests if view is desired outward, while sunlight should be moderated inward (b).
Intuitively, one could think that decreasing the sensitivity is a solution, but as the sound energy registration fluctuates, this would merely decrease the sensitivity, not the data flux of the environment. Another method is to average and delay envelope responses, but slow reaction means that there is little perceived relation between occupant behaviour and envelope behaviour.
Rather, clipping, focusing, strategic averaging of specified time domains and filtering values in the developed data processing software helped to alleviate the constant movement of the envelope, towards an intended design modelling of behaviour of the envelope, where occupants are not constantly ‘interrupted’ by the changing envelope positions that were a consequence of direct response patterns in mode 1.
However, averaging and evaluating, as an example, the sound pressure level across a period do not reflect perception of a loud environment. Rather, actuation based on a specified accumulation of peak values, within a short time frame, mode 3, appeared to be perceived as loud sensations, which better matched the envelope response behaviour to reflect occupant behaviour.
This response mode was applied from the studies where the perception psychologist was actuating the envelope based on subjective perceptions of the environment, mode 2 (electronic sensors were decoupled in this process). In fact, the response behaviour of the envelope, across all parameters registered, in mode 2, gave the best relation between environment–occupant condition and envelope reaction (Figure 7).
Results
The developed, installed and tested hybrid adaptive envelope, including the various responsive modes studied, underlines that occupant behaviours are much more complex to predict, map and integrate into an adaptive envelope than simple responsiveness to thermal environmental conditions alone. While the predicted, from computed and built prototypes, thermal-responsive behaviour of the composite membrane act in alignment with exposure to solar radiation (Figure 8), subtle nuances in occupancy sensor-monitored values are very difficult to detect, capture and filter. For instance, environmental subtleties, such as movement patterns and complex sound phenomena, are intuitively understood by humans, but not by sensors and computers even when data are developed to segment, treat and read such behaviours. In addition, occupants react differently to an active envelope, which means a complex and often non-predictable relation between envelope behaviour and occupant behaviour emerge. The observational studies also showed that the occupant awareness of the dynamic envelope ‘saturates’ at different tempi by different occupants, as also discussed by Heschong, 13 with some not noticing movements after minutes, with others responding to envelope changes across an entire day. Hence, the study shows that:
The developed oak–polyethylene elements change in accordance with the solar radiation energy received, with a full change from closed condition to maximum bending/opening within a few minutes, with specific duration depending on local solar exposure.
The air temperature measured, by sensor registrations, shows that the thermal impact of the envelope in the space has been minimum. This is due to the installed automated heating, ventilation, air conditioning (HVAC) systems, which counteracts the spatial thermal performances of the envelope. An adaptive envelope system thus has highest impact in spaces that are otherwise not thermally regulated.
The perceived atmospheric observations illustrate much more dynamics due to social interventions in the space, which environmental sensors do not capture. Hence, adaptive response patterns are best based on subjective, human-mapped sensations, rather than prescribed environmental comfort, numeric-based sensor values. The study illustrates that a human detects at much higher resolution the spatial-occupancy phenomena, and hence is able to propose more refined envelope response patterns for the adaptive system than if the decision patterns were based on sensor logging alone with the prescribed response patterns.
Given that human movement is registered in sub-second time domains, while temperature fluctuation can be hardly noticeable across an hour, adaptive response patterns should account for change in tempi of the environment, occupier and envelope if to create a meaningful cause–effect relation between building envelope and occupier. Subjective mapping, as mentioned earlier, is understood to support such informed adaptive systems.

Thermal-based composite bending, coupled with motor-based frame rotation makes for a hybrid adaptive envelope architecture reacting to both thermal and behavioural variable parameters of the space.
Discussion
Adaptive cause and effect
The research integrates, hybridises and studies how a complex adaptive envelope system can be developed and defined from material and behavioural logic perspectives. When the envelope is opening or closing due to glare-, overheating- and light-level conditions, its behaviour appears decodable by occupants.
However, developing adaptive envelopes, which aim to advance beyond generic thermal comfort response, has proven multifaceted and unpredictable. One identified complex condition is the ‘cause-effect’ relation between the dynamic movement of the envelope and the occupier perception thereof. For the occupier to establish a meaningful reading of the envelope behaviour, response patterns must be understandable across relative short time periods, due to occupancy time lengths. If such relation is established, the possibility arises for the occupant to provoke system responses and a synergetic condition can be established between an adaptive system’s behaviour and an adaptive occupant.
This instils another challenge, namely, that the space includes multiple humans with each of their subjective sensations and interests in relating to a dynamic envelope that sense occupancy behaviour. Should the system favour one occupant over others? How? What if that occupant leaves the space, should the system detect this change of occupancy, and return to relate to other occupants instead? The sensory and adaptive logic complexity of such a high-level informed and high-sensitivity space–time–subject system seems overly complex and perhaps practically unattainable. In fact, from the presented studies, the high information and sensitivity level of the developed system results in somewhat impulsive response patterns, which in turn makes it difficult to decipher what the behavioural responses are based on. In contrast, when running the response patterns based on low-level generic information, such as ‘too cold if below 21°C and too warm if above 22°C’, this excludes the direct and subjective human relation from the adaptive building, which is then based only on the generically described thermal sensations not related to the specific context and occupancy.
The different envelope response modes tested showed that when a human acted as an environmental sensor, with the direct control of actuating the envelope, best performances of the adaptive envelope were created. This points to the approach of letting an ‘expert’ train the adaptive system towards an informed and steered adaptive logic embedded into the envelope system, Thus, a form of machine learning from supervised behaviour inscription by observer. The immediate challenge with this approach is that the system then relies on such an initial training, which is also highly subjective, even if performed by a trained observer in human behaviour, without further evolution, with the potential lack of adaptive capacities in unforeseen future events.
This in turn points to further studies where numerical sensor data and qualitative observations in combination become the basis for advanced adaptive envelopes, which establish deeper causality of building–environmental–human relations in architecture.
Hybrid adaptive systems
The research has focused on a material–machine hybrid, with the human being sensed by electronic sensors. This has integrated the human; however, it can be scrutinised that the human remains only an indirect part of the hybrid system, rather than a fully integral and operational agent of the adaptive system. With the understanding, as discussed earlier, that the human remains the most sophisticated analysist of an occupied environment, it is perhaps more fruitful to consider the occupier as the ‘sensor’, ‘processer’ and ‘actuator’ of a system, similar to the suggested and tested response mode 2.
Towards such human-centred adaptive envelopes, where occupants are the sensory, computing and actuating agents, new levels of hybrid adaptive envelopes may be found, integrating not pseudo-social–thermal responses, but actually perceived complex conditions and adaptive responses thereto. Retrospectively, this aligns closer to the ideas of the Thermal Adaptive Comfort models. 14 In such human-centred adaptive architectures and the making thereof, we may question what the role of computation is in this context? How will adaptive computational processes engage and contribute with novel and informed responses to complex dynamic conditions?
Footnotes
Acknowledgements
The authors would like to thank perception psychologist Polina Chebotareva for her valuable insights and discussion in relation to the studies.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The researcher would like to thank the COWI Foundation for supporting the studies.