
Abstract
This paper presents the design, integration, and experimental validation of a novel lightweight RFID reader specifically developed for Unmanned Aerial Vehicles (UAVs). The system was engineered to meet the strict constraints of aerial platforms, including weight, power consumption, and communication reliability. The resulting 1 kg reader, integrated with a DJI Matrice 600 drone, maintained full flight endurance and demonstrated robust performance at altitudes up to 10 meters. A series of 50 experimental flyovers in a warehouse-style corridor confirmed that tag orientation significantly affects read success: top-mounted tags achieved nearly 30 reads per pass, while side-mounted and partially covered tags showed reductions of approximately 50% and 65%, respectively. These findings highlight the critical role of tag visibility and provide practical guidance for flight-path planning and tag placement in logistics environments. Unlike previous studies that focused on isolated technical aspects or specific applications, this work offers a comprehensive evaluation of UAV-based RFID systems, combining hardware innovation, rigorous performance testing, and broad applicability. The results confirm the feasibility of aerial RFID inventory and lay the groundwork for scalable, autonomous asset tracking in complex industrial settings.
Keywords
Introduction
Unmanned Aerial Vehicles (UAVs), commonly referred to as drones, have become essential tools in industrial automation, logistics, and environmental monitoring due to their mobility, autonomy, and ability to collect data in inaccessible or hazardous areas. As UAV applications expand, the integration of lightweight sensing and communication systems becomes critical to maintaining flight endurance and operational efficiency.
Radio-Frequency Identification (RFID) is a mature technology widely used for asset tracking and inventory management. Its non-line-of-sight capability and passive tag architecture make it suitable for dynamic environments. Integrating RFID readers into UAV platforms enables aerial scanning of tagged assets, offering a scalable alternative to ground-based systems. However, existing RFID–UAV implementations often suffer from limited range, high power consumption, and poor read reliability under real-world flight conditions. Recent studies have explored advanced approaches such as machine learning-based localization, millimeter-wave sensing, and passive RFID infrastructures; however, these solutions often remain limited in terms of practical deployment, experimental validation under flight conditions, or integration into complete UAV-based systems.
This paper addresses these challenges by focusing on system-level integration and rigorous performance evaluation of a lightweight RFID reader optimized for UAV deployment. Rather than introducing entirely new hardware, the contribution lies in engineering a compact, energy-efficient system and validating its performance under controlled representative flight conditions. The proposed system weighs only 1 kg and is equipped with an 8 dBiC circularly polarized antenna, allowing reliable reading of passive UHF tags at altitudes up to 10 meters under the tested conditions. A series of 50 flyovers in a warehouse-style corridor revealed that tag orientation significantly affects read success, with top-mounted tags achieving nearly 30 reads per pass, while side-mounted and covered tags showed reductions of 50% and 65%, respectively.
The key contributions of this work are: • the development of a compact, energy-efficient RFID reader for aerial platforms; • a robust methodology for evaluating read performance under dynamic flight conditions; • quantitative analysis of tag orientation effects; • and practical recommendations for flight-path planning and tag placement in logistics environments.
By bridging the gap between RFID hardware design and practical UAV deployment, this research contributes to the development of autonomous and scalable asset tracking systems in complex industrial environments.
The remainder of this paper is organized as follows: Section II reviews related work, Section III describes technical challenges, Section IV details system design, Section V presents experimental results and discussion, and Section VI concludes the paper.
Literature Review
Integrating Radio-Frequency Identification (RFID) technology with unmanned aerial vehicles (UAVs) has emerged as a promising research direction, offering innovative solutions for inventory management, logistics, and industrial monitoring. This section reviews key contributions in UAV–RFID integration, with a focus on localization methods, system architectures, and practical applications in warehouse and industrial environments.
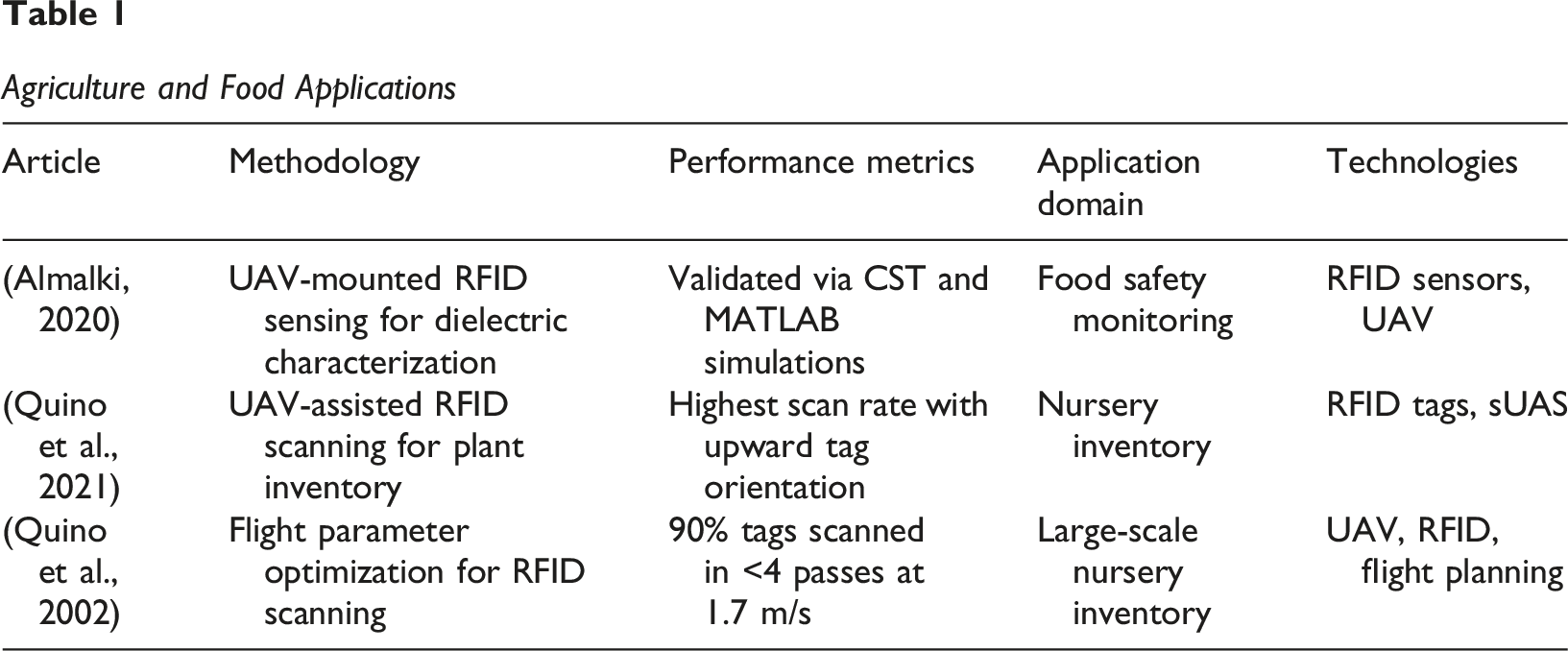
Early work by Almalki (2020) introduced an approach for enhancing food safety by integrating RFID sensors with UAVs. The proposed system enables wireless measurement of dielectric properties of goods via aerial platforms, demonstrating the feasibility of drone-assisted sensing through simulation tools such as CST Microwave Studio and MATLAB. This work highlighted the broader potential of UAV–RFID systems across logistics, production, and product authentication.
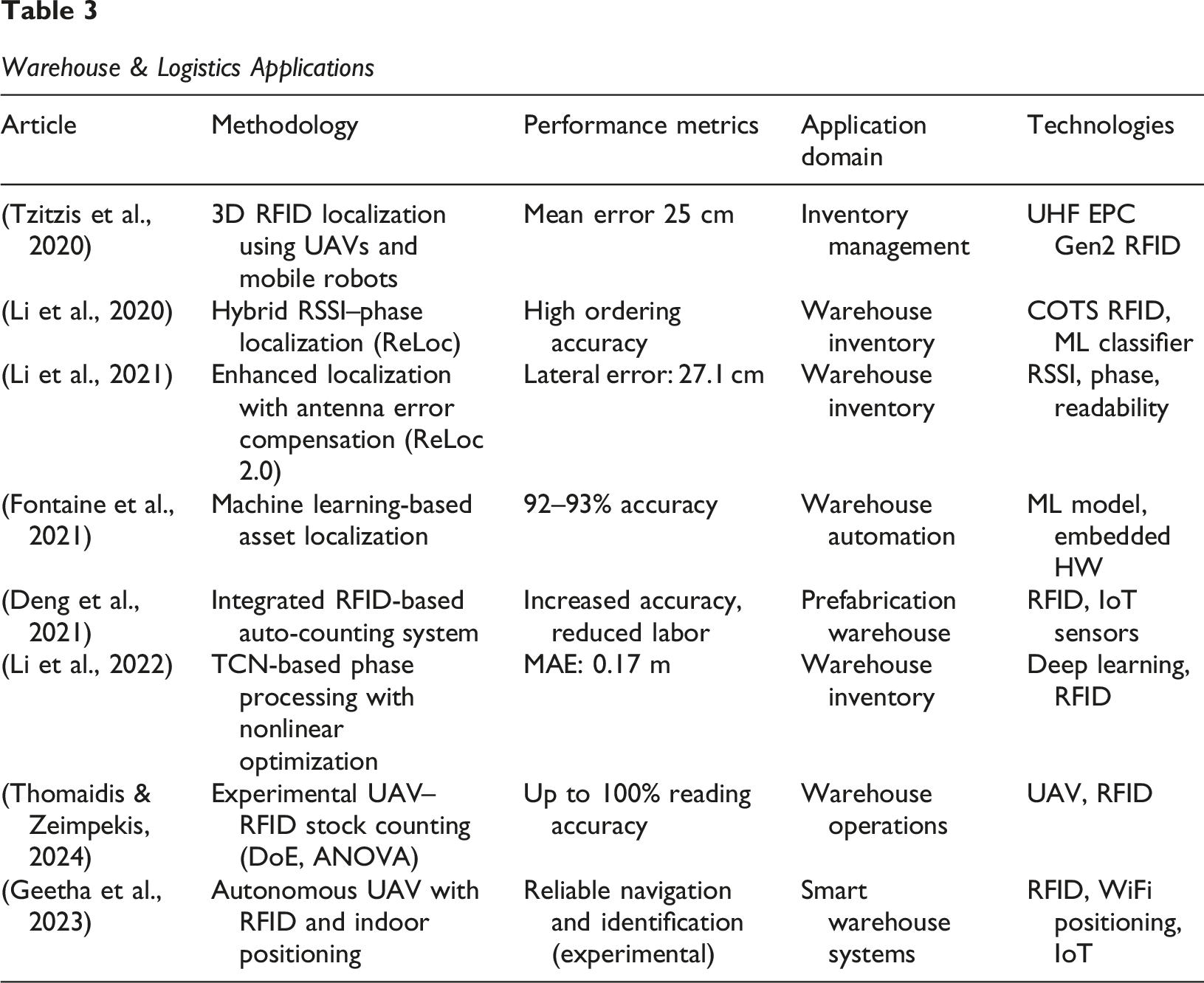
A significant body of research focuses on RFID localization using UAVs. Tzitzis et al. (2020) addressed the problem of localizing passive RFID tags using autonomous robots and drones capable of creating 3D maps and navigating complex environments. Their experimental results demonstrated mean localization errors of approximately 25 cm, confirming the applicability of such systems in large-scale warehouse inventorying. Similarly, Li et al. (2020) proposed the ReLoc method, which combines RSSI and phase measurements with a maximum likelihood approach to achieve robust item-level localization. This work was later extended in ReLoc 2.0 (Li et al., 2021), where additional parameters such as readability and improved antenna tracking were incorporated, resulting in enhanced positioning accuracy under real warehouse conditions.
More recent studies explore data-driven and machine learning-based approaches. Fontaine et al. (2021) developed a system combining RFID with machine learning to localize assets using autonomous drones, achieving 92–93% accuracy while maintaining low energy consumption. Li et al. (2022) further advanced this direction by introducing a Temporal Convolutional Network (TCN) for phase unwrapping, achieving sub-meter localization accuracy and demonstrating the potential of deep learning for practical inventory applications.
In addition to localization, several studies focus on system-level UAV–RFID integration in warehouse environments. Thomaidis and Zeimpekis (2024) investigated the influence of operational parameters such as UAV speed, flight altitude, and scanning strategies on RFID-based stock counting. Their results show that optimized configurations can achieve 100% reading accuracy while significantly reducing inventory time. Similarly, Geetha et al. (2023) proposed an autonomous indoor drone system integrating WiFi-based positioning, RFID identification, and obstacle avoidance. Their experimental validation demonstrated reliable navigation and inventory tracking, while also highlighting limitations in positioning accuracy that require further research.
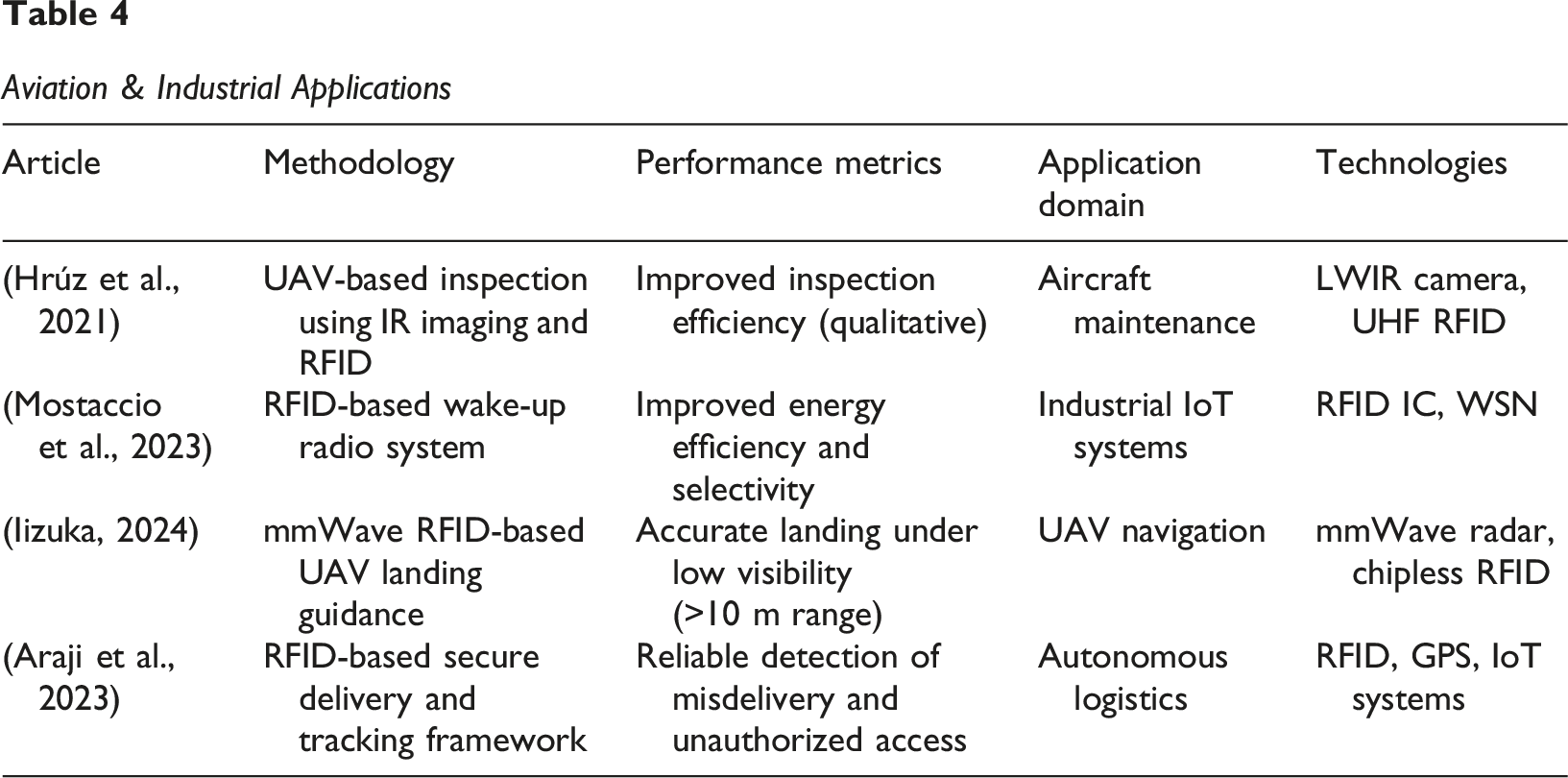
Beyond warehouse environments, UAV–RFID integration has been explored in specialized application domains. Hrúz et al. (2021) combined RFID with infrared sensing for aircraft inspection, while Quino et al. (2021, 2022) investigated UAV-assisted plant inventory, focusing on tag orientation, flight parameters, and scan efficiency in outdoor agricultural settings. Deng et al. (2021) proposed an integrated auto-counting system for prefabricated components, emphasizing the role of RFID and IoT technologies in improving efficiency and reducing labor intensity.
From a logistics and security perspective, Araji et al. (2023) introduced an RFID-based framework for secure automated delivery, where item-level tracking combined with GPS verification enables detection of misdelivery or unauthorized access. This demonstrates that RFID can play a crucial role not only in inventory tracking but also in ensuring trust and accountability in autonomous logistics systems.
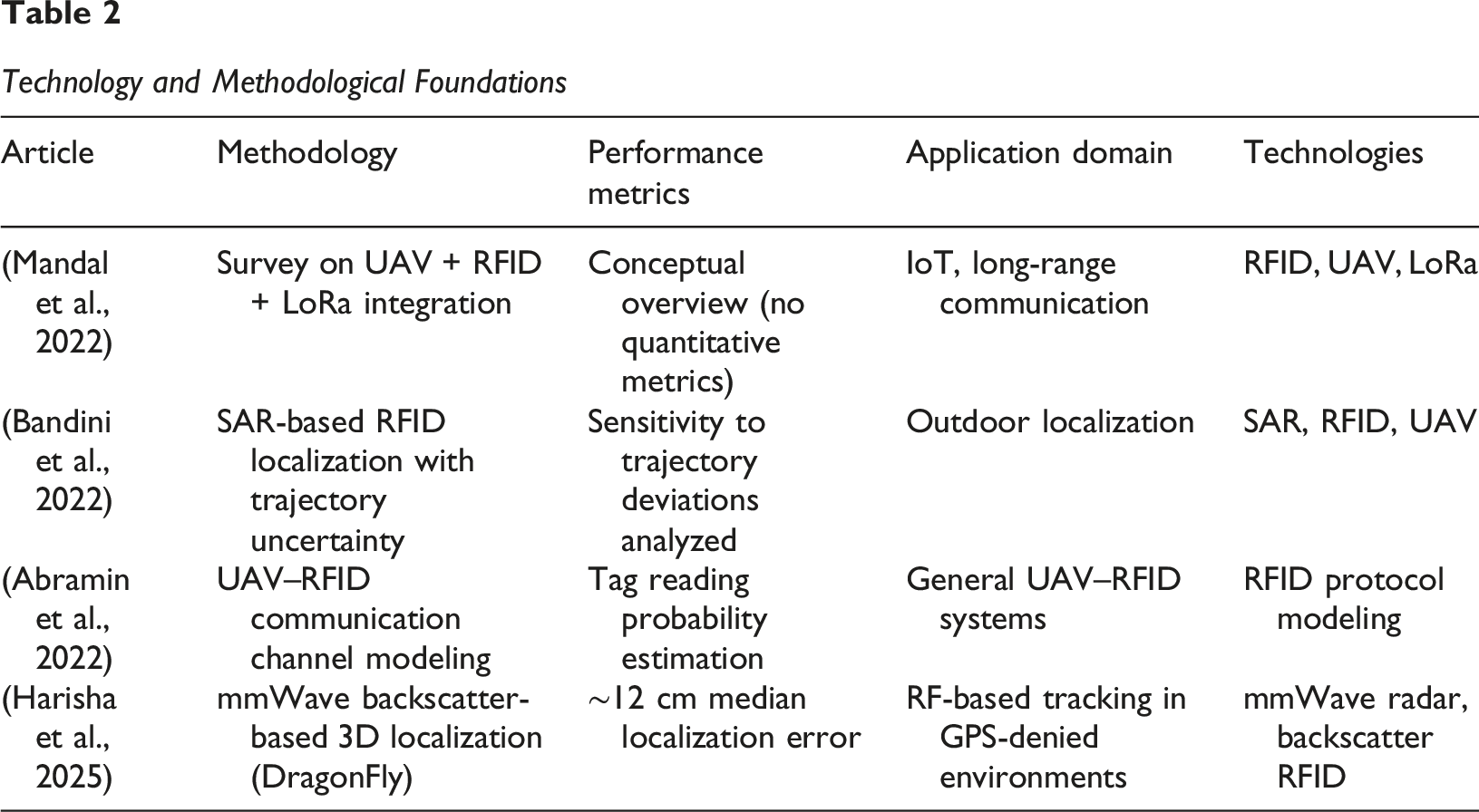
Another important research direction focuses on advanced RF sensing and infrastructure-independent approaches. Bandini et al. (2022) explored synthetic-aperture radar (SAR)-based localization, highlighting challenges related to UAV trajectory uncertainty. Extending beyond traditional RFID, Harisha et al. (2025) proposed the DragonFly system, a millimeter-wave backscatter localization approach capable of real-time 3D tracking with centimeter-level accuracy, even for dynamic targets in GPS-denied environments. These results indicate the potential of next-generation RF technologies for highly precise UAV-assisted tracking.
Complementary to RF-based methods, vision-based approaches have also been investigated. Belbachir et al. (2025) proposed a UAV-based system for product localization using QR codes and relative spatial relationships, achieving high positioning accuracy without relying on fixed infrastructure. This demonstrates that computer vision can serve as an effective alternative or complement to RFID, particularly in challenging environments where RF performance is degraded.
From an energy and sensing perspective, Paccoia et al. (2025) provided a comprehensive review of energy-autonomous sensing technologies, emphasizing the importance of passive and battery-free communication methods such as backscatter RFID. Their findings highlight the suitability of such technologies for large-scale UAV-enabled sensing systems, where minimizing energy consumption is critical.
Navigation and guidance challenges are addressed in work by Iizuka (2024), who proposed a millimeter-wave and chipless RFID-based landing guidance system for UAVs operating in low-visibility environments. Although primarily designed for maritime applications, the underlying principles are directly applicable to indoor warehouse navigation, where GPS is unavailable and visual systems may be unreliable.
In parallel, research has increasingly addressed the economic and operational aspects of UAV-based inventory systems. Leoni et al. (2025) proposed a mathematical model incorporating Inventory Record Inaccuracy (IRI) to evaluate the cost-effectiveness of drone-based inventory monitoring. Their results demonstrate significant cost reductions due to decreased labor and improved inventory accuracy. Similarly, Kapoor et al. (2024) focused on perishable goods and showed that UAV–RFID systems can improve not only operational efficiency but also product freshness and overall profitability.
Finally, broader conceptual perspectives are provided by Mandal et al. (2022), who reviewed the integration of UAVs, RFID, and IoT technologies, and by Al-Hamadani and Al-Darraji (2025), who analyzed the role of drones, computer vision, and artificial intelligence in Warehouse 4.0. These studies highlight that the integration of UAV platforms with sensing and intelligent data processing is a key enabler of scalable, autonomous warehouse systems.
Comparison of RFID-UAV Integration Studies
The following comparative analysis summarizes key findings from a structured review of selected studies focusing on the integration of RFID technology with Unmanned Aerial Vehicles (UAVs). The analyzed works are categorized according to their methodological approach, reported performance metrics, application domain, and underlying technologies.
The reviewed studies cover a broad spectrum of application areas, including agriculture and food safety, warehouse and logistics operations, aviation maintenance, and industrial monitoring. Each study contributes from a different perspective, ranging from localization accuracy and system design to machine learning integration and communication modeling.
The tabular representation provides a concise overview of the technological diversity and performance characteristics across domains. In general, warehouse-oriented studies tend to achieve higher localization accuracy and more rigorous quantitative evaluation (e.g., 92–93% accuracy in Fontaine et al. (2021) and 0.17 m mean absolute error in Li et al. (2022)), while agricultural applications focus more on scanning efficiency and operational feasibility under real-world conditions.
Furthermore, the comparison highlights that many approaches rely on commercial off-the-shelf (COTS) RFID components, whereas others explore custom-designed sensing solutions, advanced signal processing techniques, or machine learning-based localization methods. This diversity reflects the evolving nature of UAV–RFID research and indicates that system design must be adapted to specific operational requirements.
It should be noted that the presented tables primarily focus on representative technical studies forming the core of UAV–RFID integration research. More recent contributions addressing economic aspects, advanced RF sensing, and hybrid perception approaches are discussed in the preceding section.
Agriculture and Food Applications
Technology and Methodological Foundations
Warehouse & Logistics Applications
Aviation & Industrial Applications
Technology-Application Mapping in UAV–RFID Research
The heatmap provides a visual summary of technologies employed across different application domains in the reviewed literature. Each cell represents the number of studies utilizing a specific technology within a given domain (Figure 1). Heatmap of RFID technologies applied in different UAV use cases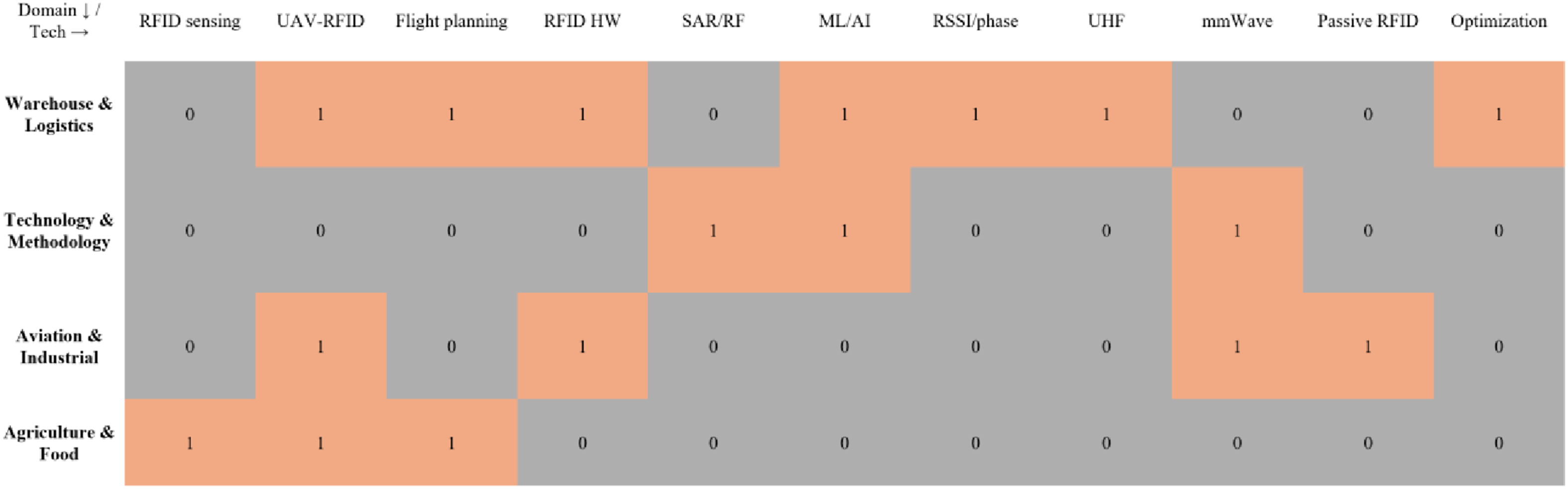
This visualization highlights several key insights: • Warehouse and logistics represent the most extensively studied domain, incorporating a wide range of technologies such as UHF RFID, machine learning, RSSI/phase-based localization, and temporal convolutional networks. • Agriculture and food applications typically rely on simpler configurations, combining RFID tags or sensors with predefined flight strategies. • Aviation and industrial applications emphasize safety-critical monitoring, often integrating infrared imaging, wake-up radios, and RFID-based inspection techniques. • The technology and methodology category includes surveys and theoretical approaches, frequently combining RFID with LoRa communication, SAR-based localization, or protocol-level simulations.
The heatmap illustrates the distribution of technologies across different UAV–RFID application domains, incorporating both conventional approaches and emerging research directions. In addition to widely adopted technologies such as UHF RFID, RSSI-based localization, and machine learning, recent studies introduce advanced methods including millimeter-wave sensing, passive and chipless RFID, and optimization-based models. These emerging approaches extend the technological landscape, particularly in areas such as high-precision localization, infrastructure-free sensing, and economic evaluation of UAV-based systems. The visualization highlights the dominance of warehouse and logistics applications, while also revealing increasing diversification in enabling technologies across domains.
The heatmap complements the tabular comparison by highlighting technology clustering and domain-specific preferences, while also helping to identify both well-explored areas and emerging research gaps.
Summary of Literature Review
The reviewed literature demonstrates the rapid evolution of UAV–RFID integration across multiple domains, including warehouse automation, agriculture, and industrial monitoring. Significant progress has been achieved in areas such as localization accuracy, system robustness, and data acquisition efficiency.
However, several challenges remain, particularly in terms of tag orientation sensitivity, trajectory uncertainty, and reliable real-time data processing under dynamic flight conditions. Furthermore, while many studies focus on localization performance, fewer contributions address system-level integration or comprehensive experimental validation.
These observations highlight the need for holistic evaluation approaches that combine hardware design, system integration, and real-world performance testing—an aspect addressed in this study.
Contribution of This Study
This study presents the development and experimental evaluation of an RFID reader specifically designed for integration with unmanned aerial vehicles (UAVs). In contrast to prior works, which predominantly focus on localization algorithms or specific application domains such as agriculture or warehouse automation, this research emphasizes system-level integration and quantitative performance assessment under controlled yet representative flight conditions.
While studies such as Deng et al. (2021) focus on application-level solutions, such as automated counting systems, the present work addresses the underlying technological challenges associated with UAV-based RFID deployment. In particular, it investigates read reliability, signal stability, and system behavior during dynamic UAV operation.
The proposed approach includes detailed analysis of key performance factors, including tag orientation sensitivity, read-rate consistency, and signal robustness during repeated flight passes. Experimental validation was conducted through a series of controlled flights, providing reproducible and quantitative insights into system performance.
By addressing both technical and operational aspects of RFID–UAV integration, this study contributes to advancing the field and provides actionable insights for industrial applications. Potential use cases include inventory audits in outdoor depots, emergency asset tracking, and inspection of remote or hazardous environments where ground-based systems are impractical.
Technical Challenges in UAV Integration
Integrating Radio-Frequency Identification (RFID) technology into Unmanned Aerial Vehicles (UAVs) introduces several engineering challenges that must be addressed to ensure reliable and efficient operation. These challenges primarily concern weight constraints, power consumption, and communication reliability under dynamic flight conditions.
Weight Constraints
UAVs are subject to strict payload limitations that directly affect flight stability and endurance. The integration of RFID components—such as readers, antennas, and supporting electronics—must be carefully optimized to remain within allowable weight margins. This requires the use of lightweight materials, compact circuit designs, and efficient mechanical integration strategies to avoid compromising flight performance.
Power Consumption
RFID systems designed for ground-based applications often exhibit power profiles unsuitable for aerial platforms. UAVs rely on limited battery capacity, and any additional power draw reduces flight time and operational range. Therefore, UAV-integrated RFID systems must employ low-power components and implement energy-efficient data acquisition and transmission protocols to maintain overall system viability.
Communication Reliability
RFID communication is typically optimized for short-range, static environments. In UAV applications, the reader must maintain reliable interaction with ground-based tags despite altitude, motion, and environmental variability. Factors such as antenna orientation, signal attenuation, and multipath interference can degrade performance. Addressing these issues involves optimizing antenna design, selecting appropriate modulation schemes, and implementing robust signal processing algorithms to ensure consistent tag detection during flight.
System Design for UAV-Integrated UHF RFID Reader
Integrating Radio-Frequency Identification (RFID) technology with Unmanned Aerial Vehicles (UAVs) requires a deep understanding of radiofrequency communication principles, particularly in the Ultra-High Frequency (UHF) band. This section outlines the theoretical foundations of near- and far-field communication and presents key technical considerations for achieving long-range RFID performance in aerial applications. It concludes with a detailed description of the custom-designed RFID reader optimized for UAV deployment.
Near and Far Field Communication
In radiofrequency systems, the electromagnetic field surrounding an antenna is typically divided into two regions: the near field and the far field. The near field is the region within approximately one wavelength (λ) of the antenna, where reactive field components dominate. For UHF RFID systems operating in the 865–868 MHz band (as per ETSI standards), the wavelength is approximately 33 cm, placing the near-field boundary within this radius.
Beyond the near field lies the far field, where radiating components of the electromagnetic field prevail. In this region, the electric and magnetic fields are orthogonal to each other and to the direction of wave propagation. The transition from near to far field typically occurs at a distance greater than λ/2π, which is approximately 5.3 cm for a 900 MHz signal.
Understanding these regions is essential for antenna design and tag placement, especially in dynamic UAV scenarios where distance and orientation vary continuously.
Long-Distance Communication Considerations
Achieving reliable RFID communication at distances up to 10 meters requires careful attention to several design factors: • Antenna Design: A circularly polarized UHF antenna with a gain of 8.0 dBiC and a beamwidth of 70°/70° was selected to ensure broad coverage and consistent tag detection across various angles and distances. • Signal Propagation: UHF signals can penetrate non-metallic materials, making them suitable for cluttered environments. However, metallic surfaces may cause reflections and multipath interference, which must be mitigated through strategic antenna placement and orientation. • Environmental Robustness: The system is designed to operate reliably across a wide temperature range (−40°C to +80°C), ensuring consistent performance in diverse outdoor conditions. • RF Interference: To minimize interference from other devices operating in the UHF band, filtering techniques and frequency planning are employed. • Power Efficiency: Given the limited energy budget of UAVs, the RFID reader incorporates the Impinj E910 chip, known for its low-power consumption and high sensitivity, making it ideal for aerial applications.
Design of RFID Readers for UAVs
The development of a UAV-compatible RFID reader required a meticulous balance between performance, weight, and energy efficiency. The resulting system, built around the Impinj E910 chip, features: • Compact and Lightweight Construction: The entire reader, including electronics, power supply, and housing, weighs only 1 kg. This ensures compatibility with a wide range of UAV platforms without compromising flight stability or endurance. • Optimized Power Management: The low-power characteristics of the E910 chip contribute to extended flight times and reduced energy demands. • High-Performance Antenna: The integrated circularly polarized antenna enhances tag detection in dynamic flight conditions, supporting read ranges exceeding 10 meters depending on tag type and orientation.
This design demonstrates the feasibility of deploying RFID readers on UAVs for real-time asset tracking, inventory management, and environmental monitoring in complex outdoor environments.
The system architecture is outlined in Figure 2, which presents the core components of the UAV-integrated RFID reader. The Impinj E910 chip interfaces with a circularly polarized UHF antenna and is supported by a microcontroller unit (MCU) responsible for managing data acquisition, signal processing, and communication protocols. The MCU connects to the UAV’s flight control system via UART and digital I/O interfaces, enabling real-time telemetry and diagnostics. The modular design ensures compatibility with various UAV platforms and supports flexible integration with ground-based infrastructure. Block Diagram of RFID Reader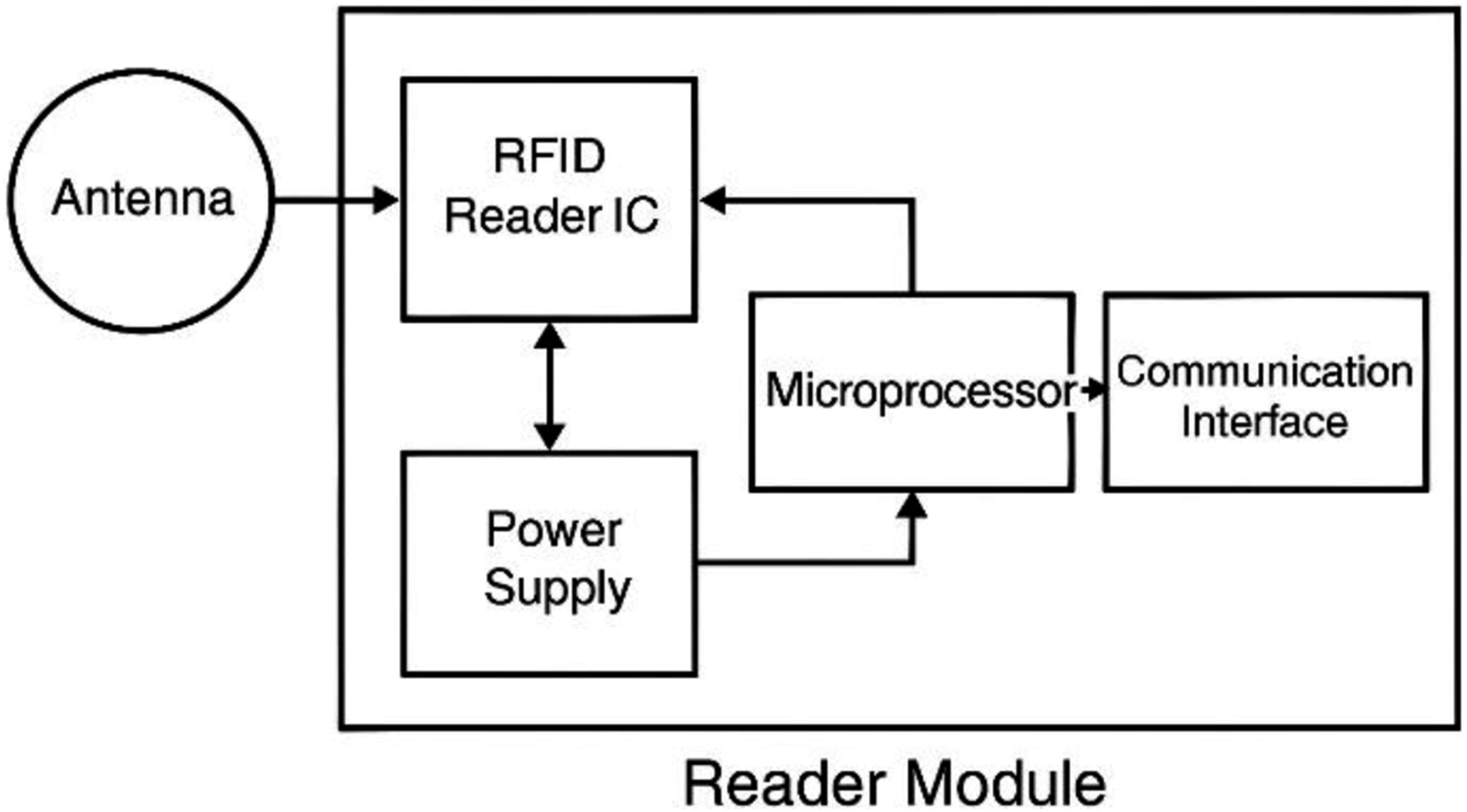
A more detailed view of the reader module is provided in Figure 3, which focuses on the R9100 C chip and its peripheral connections. The diagram highlights the regulated DC power input, UART communication lines, and GPIOs used for control, monitoring, and analog interfacing. Connection types are categorized as required, recommended, or optional, offering a clear overview of the system’s integration flexibility. This configuration supports efficient data exchange between the RFID reader and UAV systems, ensuring reliable tag detection during flight. Block Diagram of the Reader Module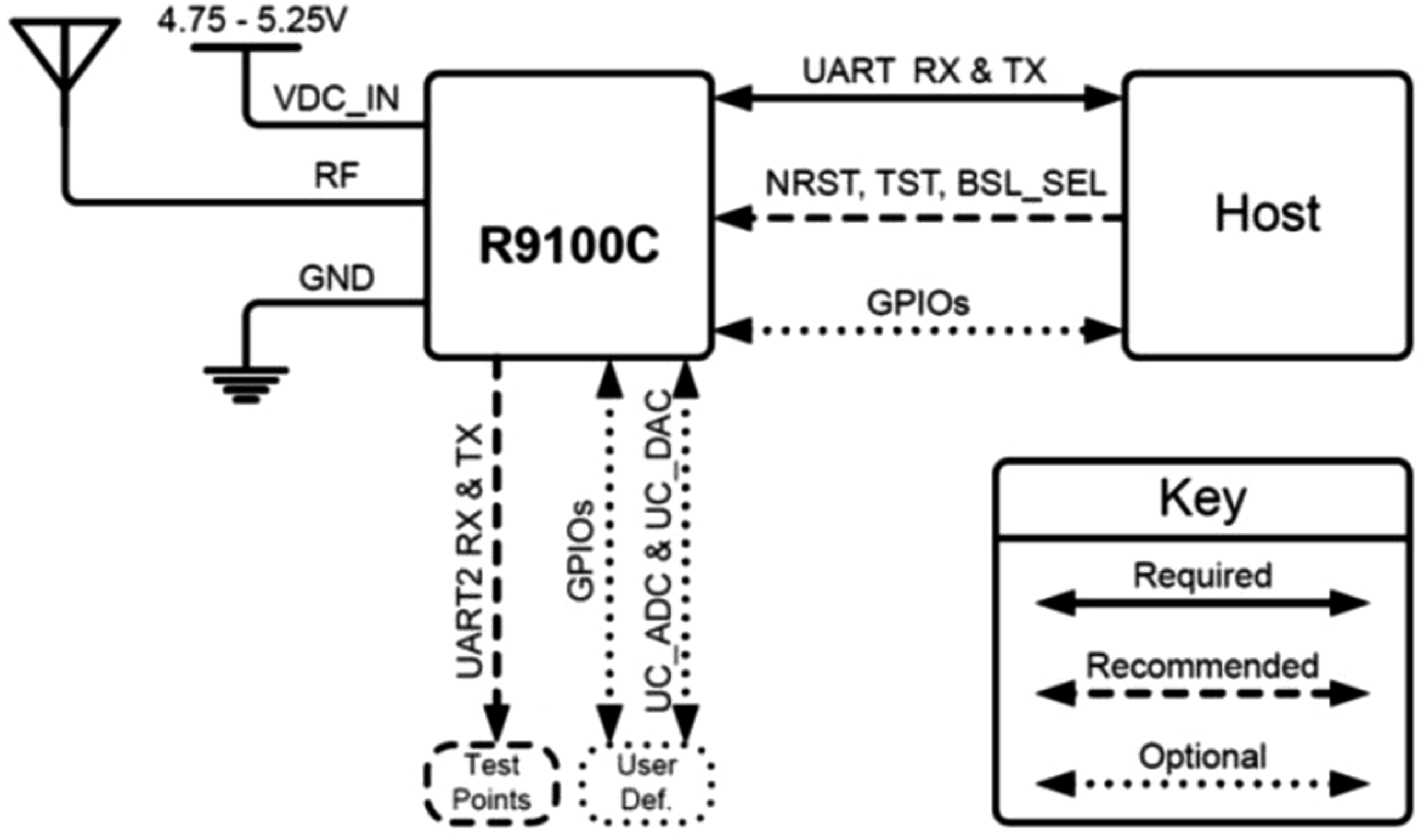
System Integration and Communication Gateway
To enable reliable long-range detection of passive RFID tags from UAV platforms, the reader module is built around the Impinj E910 chip, which offers high sensitivity (−94 dBm) and low-power consumption. The reader is designed for compact integration, weighing only 1 kg, and is optimized for aerial deployment in dynamic environments.
The system architecture includes a dedicated communication gateway based on the NXP i. MX8M-Plus processor, a quad-core ARM Cortex-A53 platform engineered for continuous operation in harsh conditions (−40°C to +80°C). This gateway manages onboard data acquisition and processing, and supports multiple communication interfaces such as LTE/4G, Wi-Fi 802.11ax, Bluetooth 5.3, Gigabit LAN, USB 3.0, RS485/RS232, and digital I/O ports. These interfaces ensure robust connectivity with UAV control systems and ground-based infrastructure, enabling real-time data transmission, remote configuration, and diagnostics.
The overall interaction between the airborne RFID reader and the ground-based data collection system is illustrated in Figure 4, which shows the communication flow and integration points across the UAV platform. This modular design supports flexible deployment across various UAV models and industrial use cases. Communication Diagram of the Entire RFID Reader System Integrated Into the UAV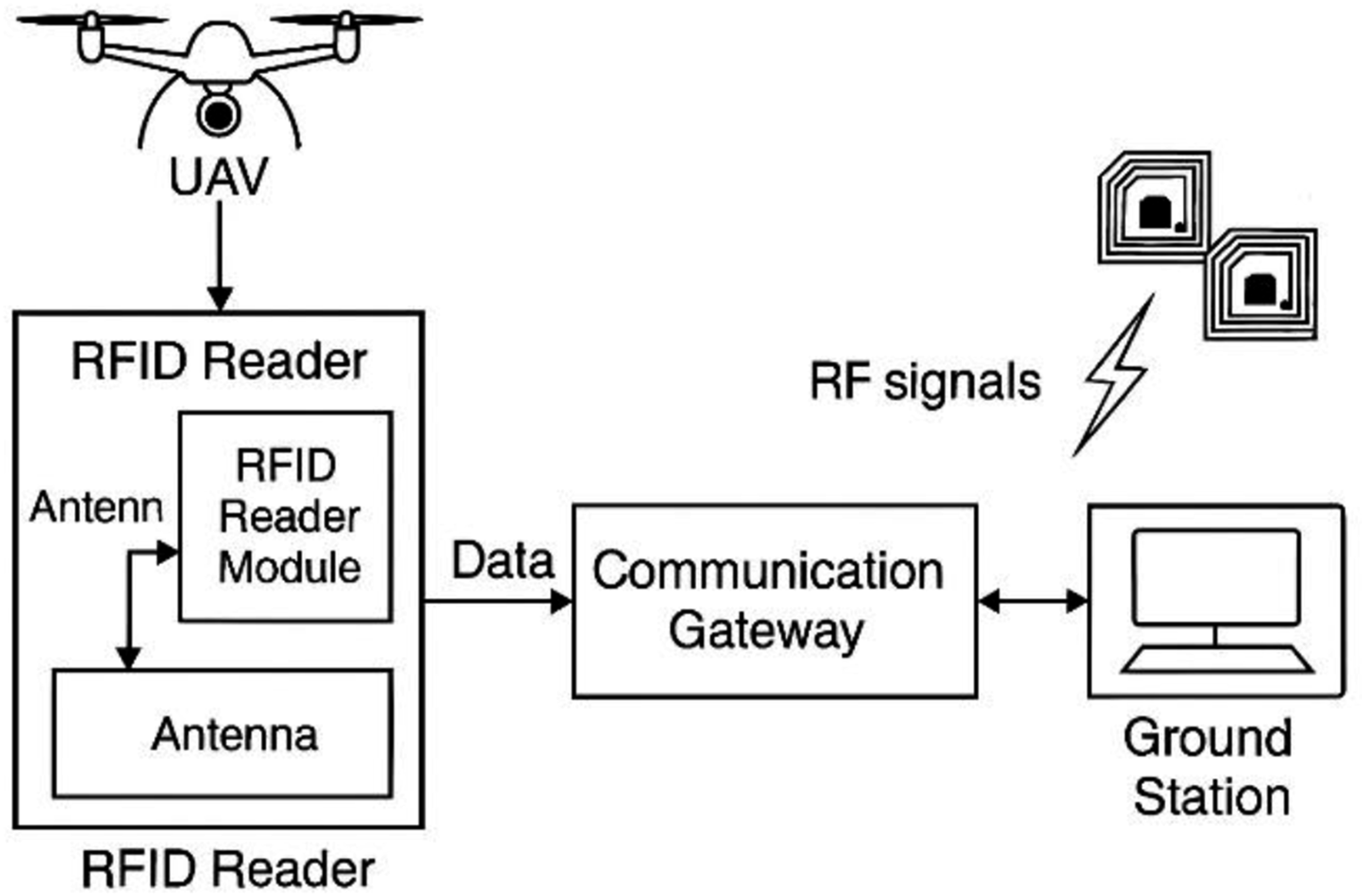
A more detailed view of the internal structure of the RFID reader is provided in Figure 5, which outlines the signal processing chain and embedded computing module. The diagram includes dual antennas connected via an RF switch and directional coupler, a power amplifier, envelope detector, IQ demodulator, ADC, and a microcontroller unit (MCU). The embedded UCM-iMX8M-PLUS module features a wide array of I/O interfaces (USB, Ethernet, UART, CAN, SPI, I2C, GPIO, PCIe), supporting seamless integration with peripheral devices and UAV systems. Scheme of Developed Compact RFID Reader for UAVs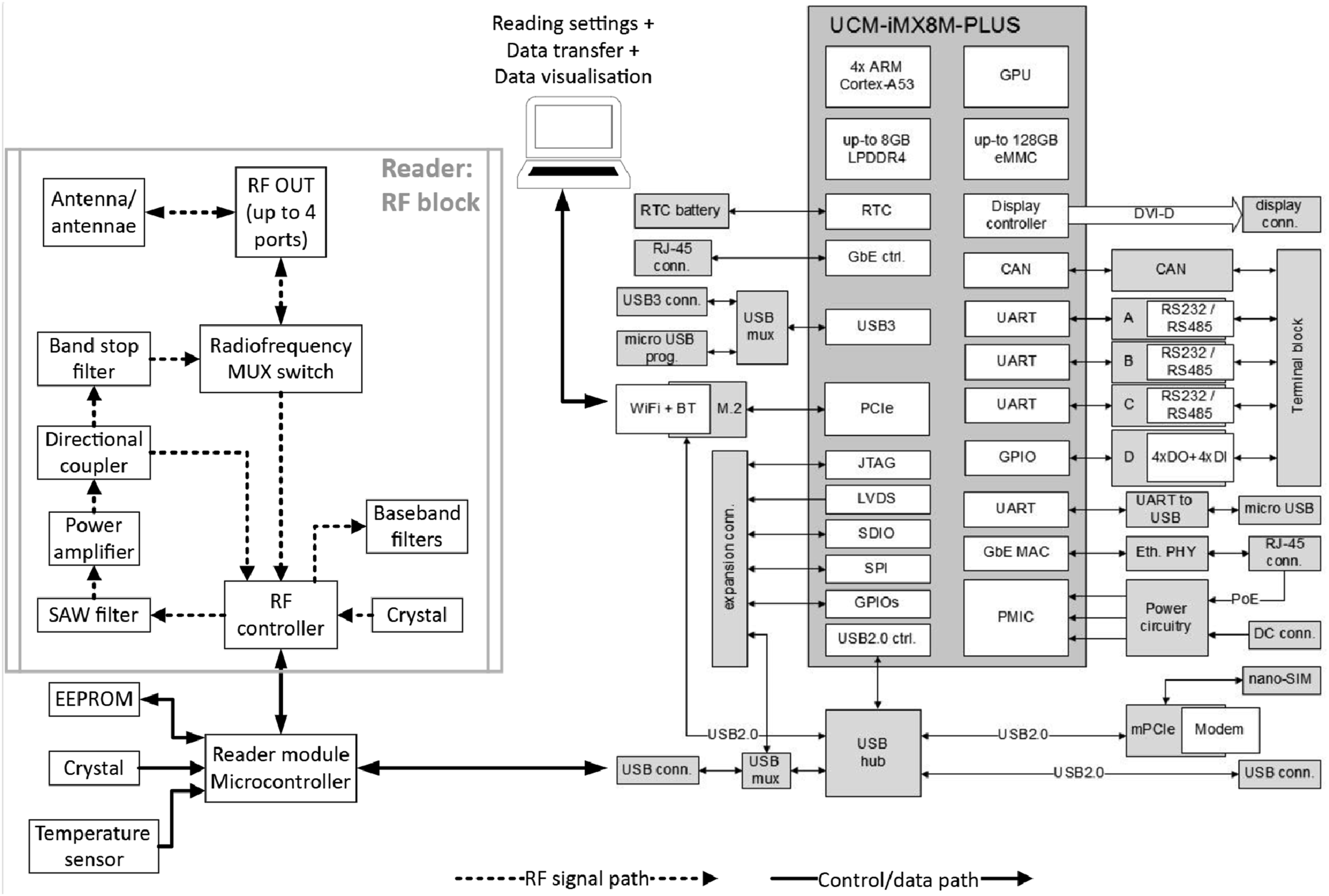
Together, these components form a compact, high-performance RFID solution tailored for aerial inventory, asset tracking, and environmental monitoring in industrial environments.
UAV Platform Integration
The developed RFID reader is designed for seamless integration with UAV platforms, including the widely adopted DJI Matrice 600. The integration process involves interfacing the RFID reader and its communication gateway with the UAV’s onboard systems, ensuring compatibility with flight control, power supply, and data transmission protocols.
The physical implementation of the developed RFID reader is shown in Figure 6, which presents the internal layout of the device with its casing removed. The image reveals the main circuit board, housing key components such as the RFID chip, microcontroller, and communication interfaces. The compact enclosure is designed for UAV compatibility, with robust mechanical construction and efficient spatial arrangement to minimize weight and ensure flight stability. The visible connectors and wiring support integration with external sensors and the UAV’s onboard systems. Developed RFID Reader
Pre-Flight Testing and Deployment
Following successful ground-based integration and validation, the complete RFID reader system was deployed on the DJI Matrice 600 UAV for a series of experimental flights. These tests were conducted in a warehouse-style corridor to simulate realistic logistics conditions and assess system performance under dynamic flight scenarios.
The primary objectives of the flight tests were to evaluate: • Tag detection reliability, • Read range stability, and • System responsiveness during flight.
The UAV platform used for deployment is shown in Figure 7, where the DJI Matrice 600 is equipped with the developed RFID reader module. The image captures the drone in an industrial outdoor setting, representative of logistics environments. The reader is securely mounted on the drone’s body, with visible electronic components and sensors integrated to support aerial RFID scanning and telemetry. DJI Matrice 600 Drone Equipped With Developed RFID Reader
The experimental setup and data collection protocol are described in detail in the following Methodology section.
Performance Analysis
This chapter presents a statistical evaluation of the measured data, demonstrating how the position of an RFID tag affects the number of successful reads during UAV flyovers. The analysis follows a structured approach, beginning with descriptive statistics, followed by assumption testing, and concluding with inferential analysis and practical interpretation. Although the experimental setup focuses on a controlled scenario, it enables a clear isolation of key variables influencing RFID read performance during UAV operation.
Experimental Methodology
To determine the effective combination of UAV flight trajectory and RFID tag placement on logistics units, a series of controlled experiments was conducted. The tests measured the success rate of tag readings in three distinct scenarios: • TOP—The tag is placed on the top surface of the pallet with a direct line-of-sight (LoS) to the reader antenna. This configuration represents near-ideal propagation conditions with minimal signal attenuation and is expected to provide the highest read reliability. • SIDE—The tag is mounted on the side wall of the pallet, where the RF signal path may be partially obstructed by the pallet structure or stored goods. This configuration introduces shadowing and orientation effects, leading to reduced signal strength and increased variability in read performance. • OCCLUDED—The tag is located on the top surface but covered by another pallet or load. This setup represents a strongly obstructed scenario with significant signal attenuation and multipath effects, corresponding to a worst-case condition for reliable tag reading.
The selected scenarios represent typical configurations encountered in warehouse operations and were intentionally simplified to isolate the effect of tag visibility and obstruction on read performance. While real-world environments introduce additional complexities such as multipath propagation and clutter, the controlled setup allows for a systematic comparison of fundamental RFID-UAV interactions.
Figure 8 illustrates the three tested configurations of RFID tag placement, highlighting the varying levels of visibility and obstruction relative to the UAV-mounted antenna. Experimental Scenarios Illustrating RFID tag Placement on Pallets During UAV Flyovers: TOP—Tag on the Top Surface (Direct Line of Sight), SIDE—Tag on the Side Wall (Partially Obstructed), and OCCLUDED—Tag on the Top Surface but Covered by Another Pallet (Strongly Obstructed)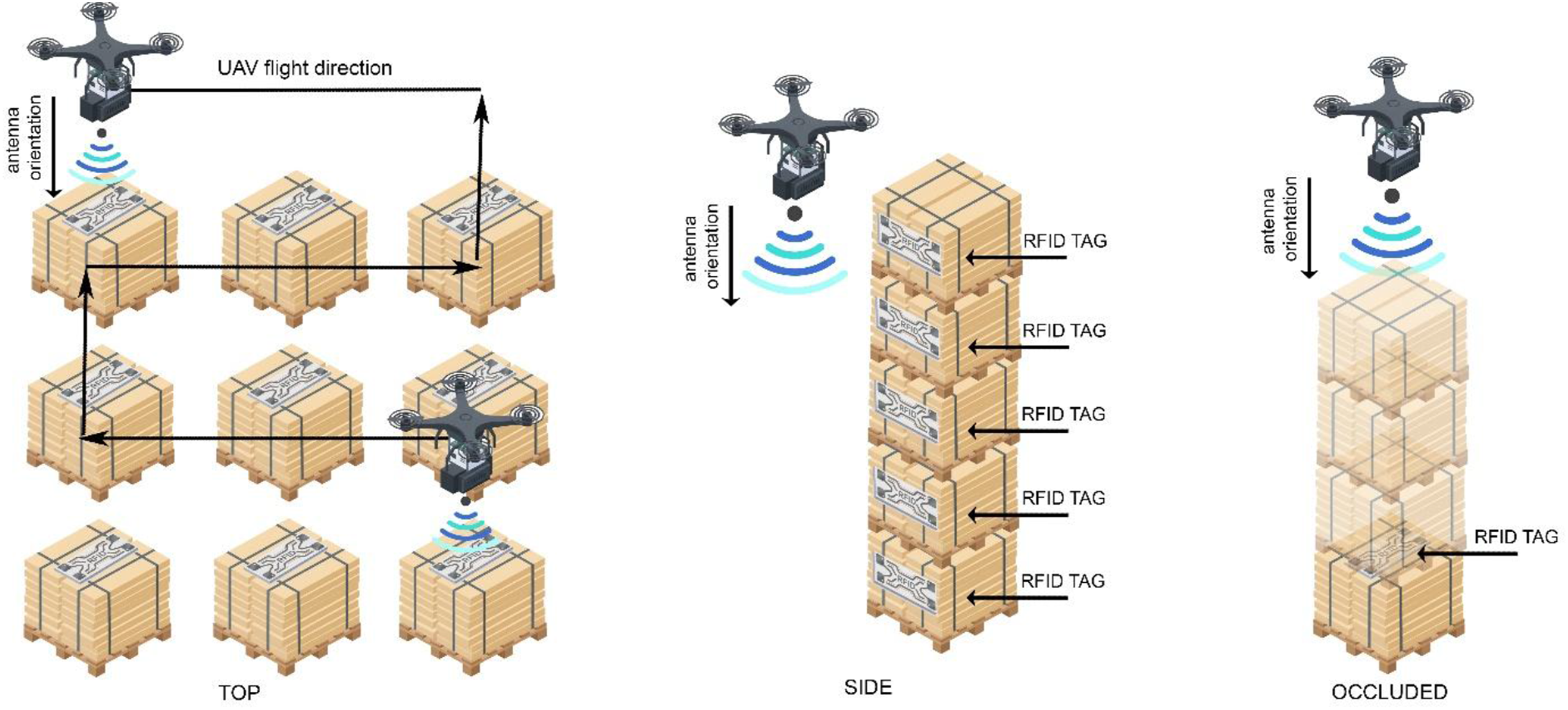
Testing Environment: • Tag type: Alien ALN-9662, EPC Gen2, passive UHF • Antenna: circularly polarized, 8 dBiC • Tag orientation: long side parallel to flight path • Number of tags: one per pallet • Pallet material: wood (weor specify if concrete/metal) • Flight path: straight line over pallets, 10 m Above Ground Level (AGL), 2.5 m/s
The test environment consisted of a paved area measuring 60 × 10 meters, where three pallet units were arranged in a straight line, spaced 5 meters apart. Each pallet represented one of the three scenarios. The UAV platform used was the DJI Matrice 600, equipped with the developed lightweight RFID reader based on the Impinj E910 chip.
The drone performed 50 linear flyovers at a constant altitude of 10 meters above ground level (AGL) and a speed of 2.5 m·s−1. Each active reading segment lasted 8 seconds, followed by a four-second turn and stabilization phase. To accurately associate RFID reads with UAV position, the time at which the antenna passes over a given tag was estimated using: where: t = time when antenna passes over tag, t
0
= timestamp of flyover start, x = horizontal distance from start point, v = UAV forward speed.
The RFID reader operated in continuous inventory mode, transmitting each successful read (EPC, timestamp, RSSI) via UART (115 kBd) to the onboard gateway. This configuration reflects typical industrial RFID operation modes and ensures continuous tag interrogation during UAV flight. Data were stored in a binary log file indexed by flyover number. After landing, the log was converted into a structured table, where each row represented one flyover and reported the number of successful reads for each tag scenario.
Figure 9 illustrates the experimental setup during one of the test flights, including UAV position, pallet arrangement, and spatial layout of the test area. The simplified environment ensures minimal external interference, allowing clear observation of RFID read behavior under controlled conditions. Trained personnel were present to operate the UAV and supervise the experiment in compliance with European drone operation regulations. Experimental Setup Visualization (The Simplified Layout was Intentionally Selected to Isolate the Influence of tag Placement Under Controlled Conditions)
Data completeness was verified (50 flyovers, no duplicate EPCs), and only reads within the eight-second active window were retained. Timestamps were converted to ISO 8601 format (UTC+2). The resulting dataset enables a quantitative assessment of how tag position and obstruction affect read success. It also serves as a foundation for optimizing UAV flight trajectories and recommending best practices for RFID tag placement on logistics units. This repetitive flight pattern ensures statistical robustness of the collected data and minimizes the influence of random variations during UAV operation.
The selected parameters were kept constant throughout the experiments to ensure repeatability and to isolate the effect of tag placement as the primary variable under investigation. This approach follows a controlled experimental design strategy, where secondary variables are intentionally fixed to enable a statistically robust evaluation of the primary factor. While this limits the generalization to more complex environments, it provides a clear and quantifiable baseline for UAV-RFID system performance. It should be noted that additional parameters such as flight altitude variation, speed changes, and environmental clutter were not included in this study and are discussed as part of the limitations and future work.
Data Processing
The data were processed using a standard methodology (Montgomery et al., 2013), beginning with an assessment of distribution shape, followed by verification of key assumptions, and concluding with the selection and application of appropriate statistical tests. All calculations were performed in Statgraphics Plus 5.0 (Statgraphics, 2001), and results were visualized and interpreted using Microsoft Excel (Microsoft Corp., 2023). This structured dataset provides a reliable basis for subsequent statistical analysis and enables reproducible evaluation of UAV-based RFID performance.
A one-way ANOVA was selected because it allows comparison of means across more than two groups (TOP, SIDE, OCCLUDED) while controlling for Type I error, which would be inflated by multiple t-tests.
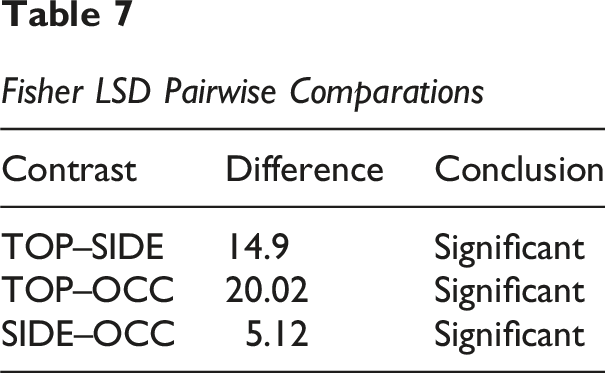
Fisher’s LSD was applied as a post-hoc test to identify which pairs of tag positions differ significantly, given that ANOVA indicated overall differences (p < 0.0001).
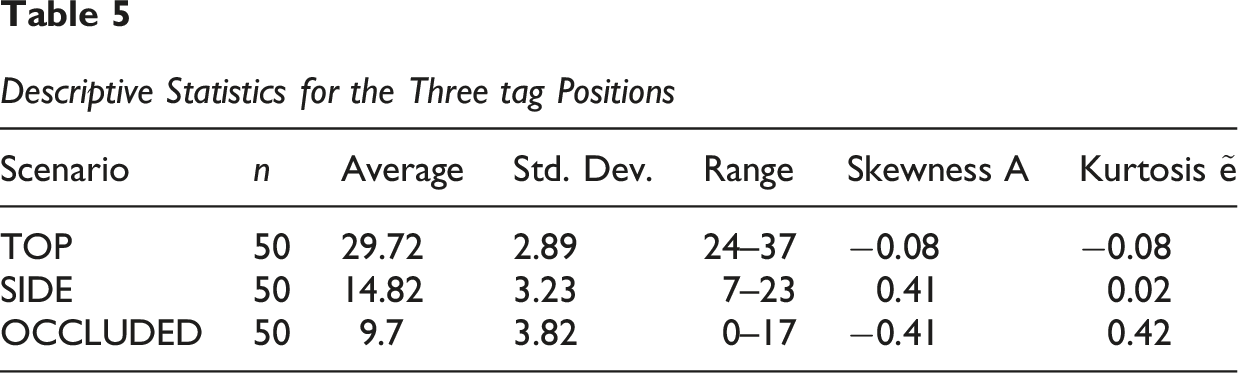
Descriptive Statistics for the Three tag Positions
To visualize the distribution and detect potential outliers, a box-and-whisker plot was generated (see Figure 10). The plot confirms the absence of outliers and the stability of the samples. Given the sample size (n = 50), the central limit theorem supports the assumption of normality, and no data transformation was necessary. Box-and-Whiker Plot of Per-Pass RFID Read Counts for the Three Tag Placements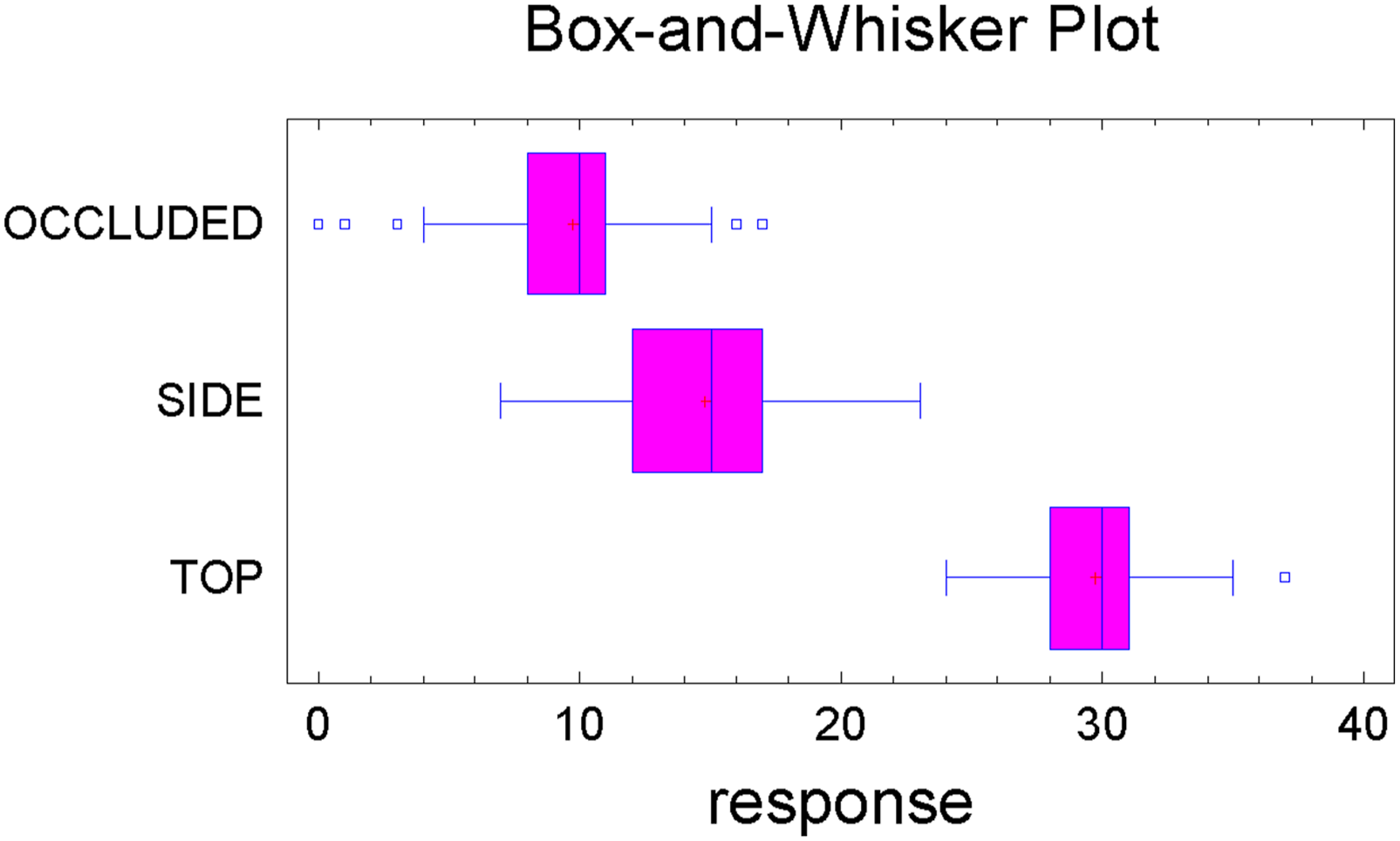
Homogeneity Tests
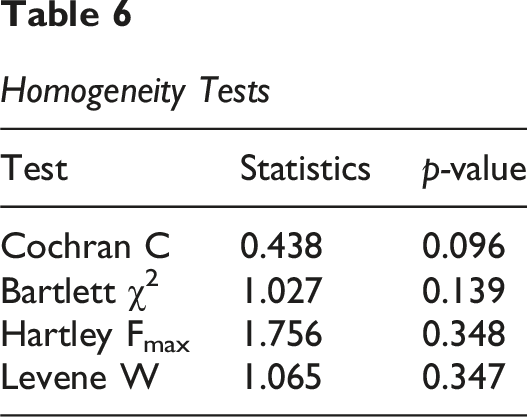
Given that all assumptions were met, a one-way ANOVA was applied to compare the means across the three scenarios. The relatively large sample size (n = 50 per group) further increases the robustness of the ANOVA results and reduces sensitivity to minor deviations from normality. This method avoids the inflation of Type I error associated with multiple t-tests and maintains statistical power. The ANOVA formula used is shown in equation (2). where: MS_between = variance between groups, MS_within = variance within groups, nᵢ = sample size per group, x̄ᵢ = group mean, x̄ = overall mean, sᵢ
2
= group variance, k = number of groups, N = total sample size.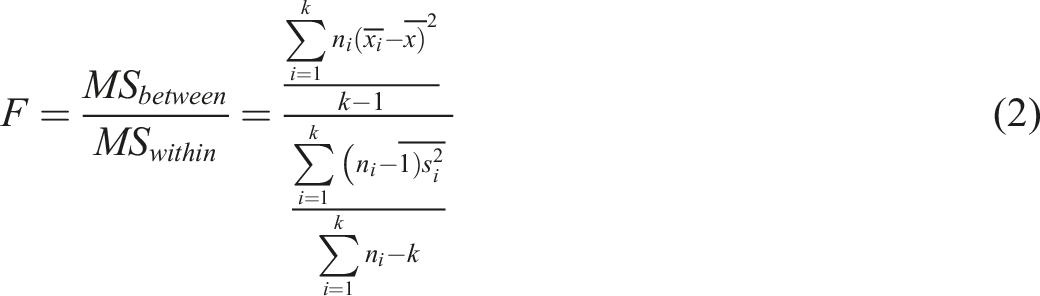
Fisher LSD Pairwise Comparations
Results
The experimental flights confirmed a strong dependence of read success on tag placement: • TOP: 29.7 ± 2.9 reads per pass (high reliability), • SIDE: 14.8 ± 3.2 reads (approx. 50% reduction), • OCCLUDED: 9.7 ± 3.8 reads (approx. 65% reduction).
The observed differences are substantial and consistent across all repetitions, indicating that tag placement has a dominant and reproducible effect under controlled UAV operating conditions.
These results are summarized in Figure 11, which presents the mean and standard deviation of read counts across 50 passes for each tag scenario. A one-way ANOVA confirmed a statistically significant difference among the groups (F = 486, p < 0.0001), and post-hoc LSD testing showed that all pairwise comparisons were significant. The assumptions for parametric analysis were satisfied, validating the robustness of the statistical evaluation. Mean ± SD (50 Pass); ANOVA: F = 486, p < 0.0001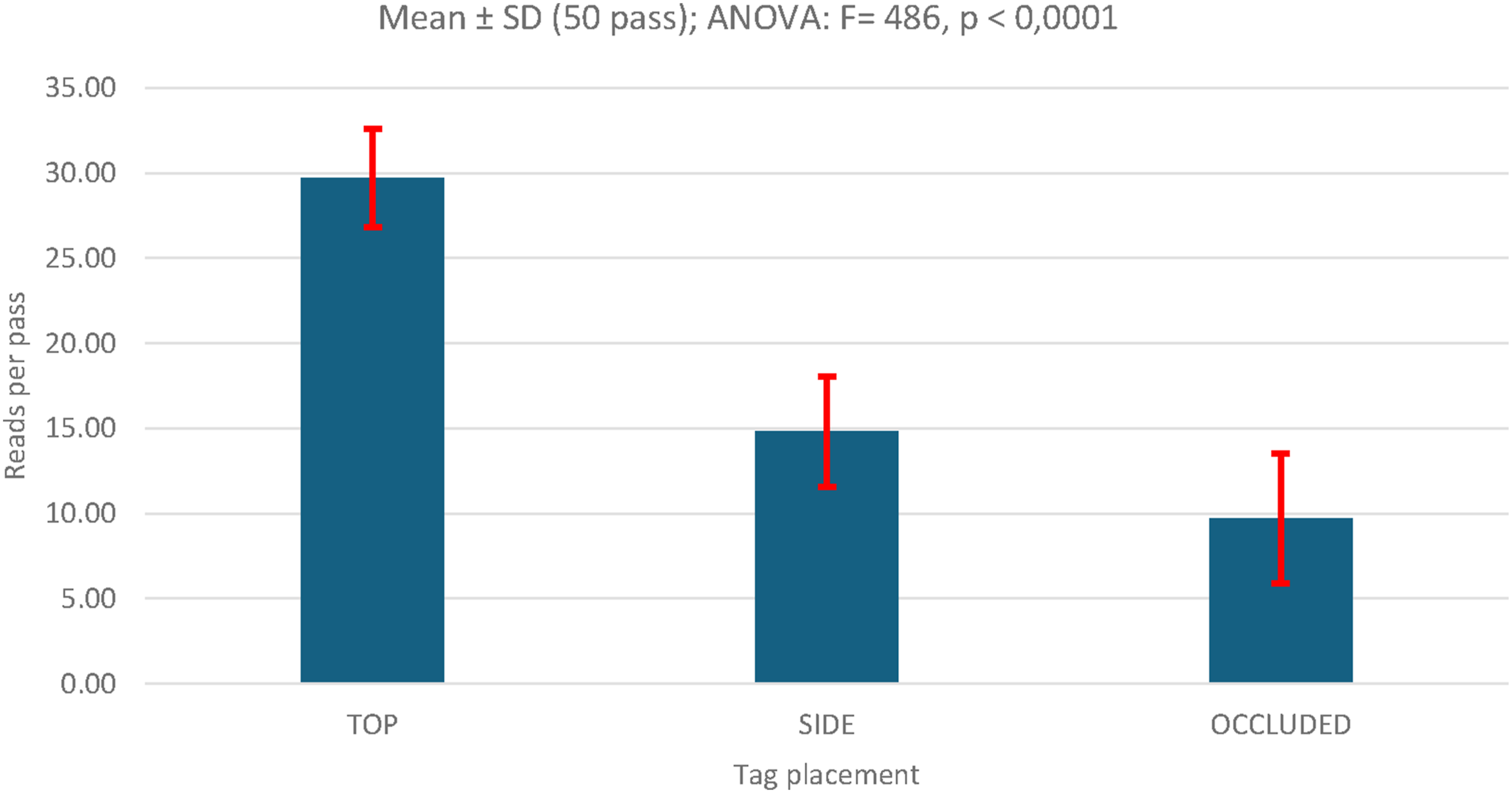
Effect Size
To complement statistical significance, effect size was calculated using eta squared (η2), which quantifies the proportion of variance explained by tag placement. The obtained η2 = 0.91 indicates a very large effect, confirming that tag position is the dominant factor influencing read success. This confirms that tag placement alone explains the vast majority of variability in read performance, outweighing potential minor effects of uncontrolled factors. Reporting effect size provides practical insight beyond p-values, highlighting the magnitude of differences among scenarios.
To assess system consistency over time, a time-series analysis was performed. Figure 12 illustrates the stability of read counts across all 50 flyovers. Linear regression of read count versus flyover order yielded a slope of less than 0.05 reads per pass2, indicating no observable degradation in performance. This confirms the system’s operational stability during continuous aerial scanning. Reading Stability Over 50 Passes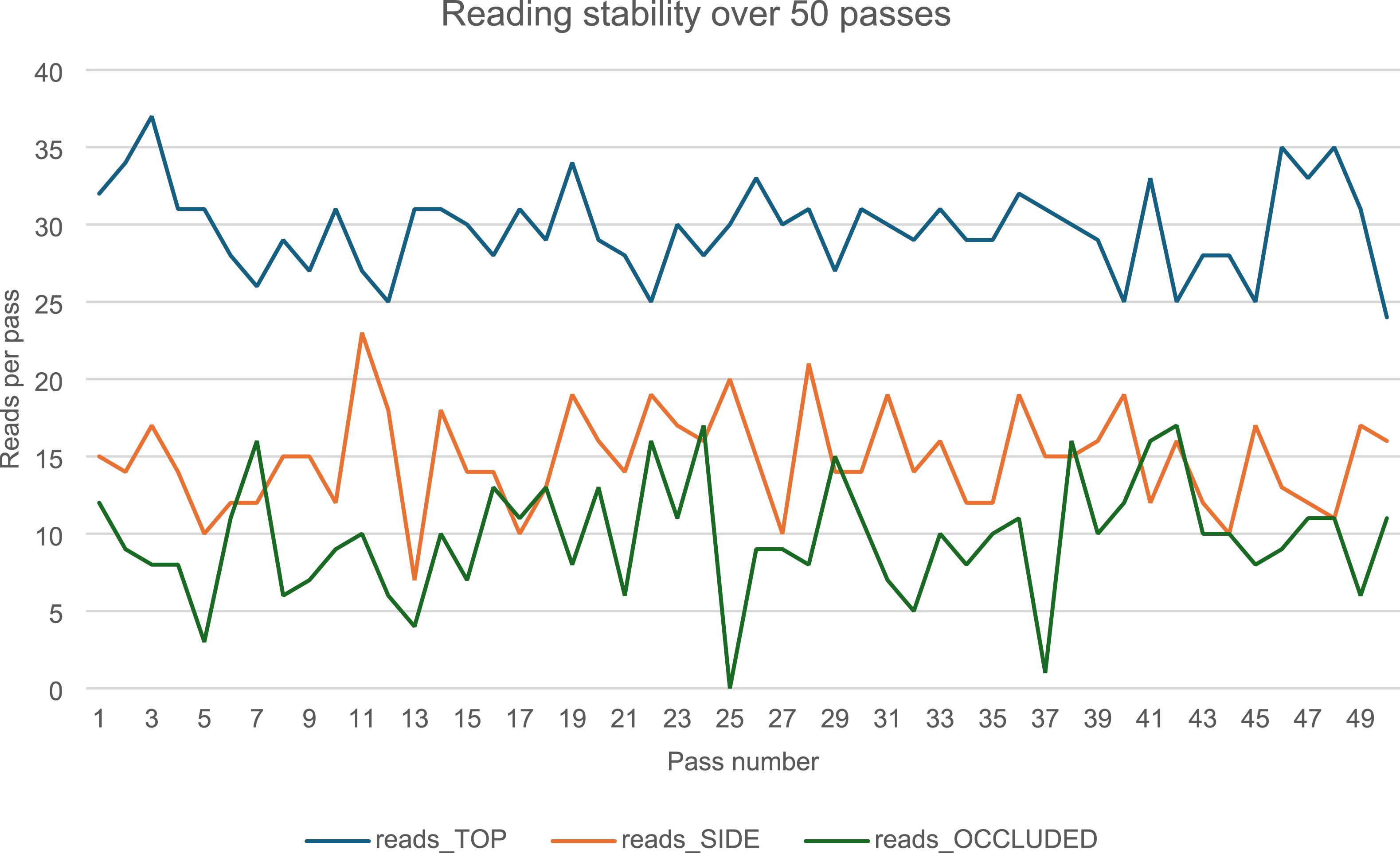
Practical Implications
From a practical standpoint, the results imply the following: • Tag visibility is critical: Direct line-of-sight placement on the top surface yields nearly three times more reads than a covered tag. • A flight profile of 10 m AGL at 2.5 m·s−1 provides sufficient coverage without degrading system performance. • If top placement is not feasible, supplementary flight paths (e.g., side or diagonal flyovers) should be considered to reduce shading and improve read rates.
These findings provide quantitative evidence for optimizing both tag placement and UAV flight planning in real-world logistics environments.
Discussion
The experimental results clearly demonstrate that tag placement is the dominant factor influencing read success during UAV flyovers. This section interprets the findings in the context of warehouse operations, discusses limitations of the study, and outlines directions for future research.
Tags placed on the top surface of the pallet achieved nearly the maximum number of reads per pass, while side-mounted tags yielded approximately half, and covered tags only one-third. This pronounced difference confirms that, beyond optimizing flight parameters and reader power, ensuring a direct line of sight between the tag and the antenna is critical for successful aerial inventory. This observation is consistent with fundamental RF propagation principles and highlights the importance of tag visibility in UAV-based RFID systems.
At the tested flight profile (10 m AGL, 2.5 m·s−1), the tag was illuminated for approximately 1.5 seconds—sufficient even for partially obstructed tags. However, if operational constraints require increased speed or altitude, it is advisable to split the flight path into top and side passes or to use higher-gain or directional antennas to compensate for reduced exposure time.
The study used a single tag type (Alien ALN-9662) and a circularly polarized 8 dBiC antenna. Results may vary with different hardware configurations. The test environment—a concrete corridor without metal shelving—does not fully replicate the reflective and obstructive conditions of real warehouses. Additionally, only linear overhead flyovers were tested; diagonal or lateral approaches remain unexplored.
From a practical standpoint, top-mounted tags are strongly recommended. If side or covered placements are unavoidable, supplementary flight paths should be planned to maintain high read success rates. For standard inventories, a single overhead pass is sufficient; for obstructed tags, at least two passes are recommended to exceed a 95% read probability.
Limitations and Future Work
The experimental evaluation was conducted under controlled conditions to ensure repeatability and isolate the impact of tag placement. However, it is important to note that several operational parameters were not systematically varied. In particular, flight height, UAV speed, antenna orientation, and environmental complexity (e.g., obstacles, multipath reflections, and RF interference) were kept constant. While this approach enables clear interpretation of the results, it limits the generalization of the findings to more complex real-world scenarios.
While the present study primarily evaluates read rate as a key performance indicator, additional RFID metrics such as the Received Signal Strength Indicator (RSSI) and signal stability are also important for a comprehensive system characterization. These parameters have been investigated in related studies focusing on UAV-based RFID measurements under varying environmental and operational conditions (Benes et al., 2022), where their relevance for performance evaluation has been experimentally confirmed. In particular, RSSI-based analysis enables a deeper understanding of signal propagation, multipath effects, and tag readability under dynamic flight conditions. However, incorporating these metrics would require a more complex experimental setup and extended measurement campaigns, which are considered as part of future work.
The current evaluation does not fully capture the impact of complex warehouse environments, particularly those involving metallic shelving, dense pallet stacking, and dynamic obstacles. Such conditions can introduce significant multipath effects and signal attenuation, potentially affecting read reliability.
Further research should be carried out: • Evaluating alternative tag types, including on-metal and miniaturized labels, • Testing in metal-rich environments and fully stacked warehouse scenarios, • Analyzing adaptive flight parameters (altitude, speed, and trajectory), • And incorporating advanced data processing techniques such as multi-pass data fusion and RSSI-based validation.
Conclusion
This paper presents the design, integration, and experimental validation of a lightweight RFID reader tailored for deployment on Unmanned Aerial Vehicles (UAVs). The system was optimized for weight, power efficiency, and communication reliability, enabling real-time reading of passive UHF tags from altitudes up to 10 meters without compromising drone endurance. A series of 50 experimental flyovers in a simulated warehouse corridor demonstrated that tag visibility is the key determinant of read success. Statistical analysis confirmed significant differences among tag placements (ANOVA p < 0.0001), with top-mounted tags achieving 29.7 ± 2.9 reads per pass, side-mounted 14.8 ± 3.2, and covered tags 9.7 ± 3.8.
The novelty of this work lies in its integrated approach to RFID-UAV systems. Unlike many previous studies that focus on specific aspects such as localization or sensing techniques, this research combines hardware design, system integration, and experimental performance evaluation under controlled flight conditions. The proposed reader, weighing only 1 kg and equipped with an 8 dBiC circularly polarized antenna, was successfully integrated into a commercial UAV platform (DJI Matrice 600) without compromising flight stability or battery life.
The study offers several practical and scientific benefits. It provides detailed performance metrics that validate the feasibility of RFID-based aerial inventory, even under partial or full tag obstruction. The results demonstrate that UAVs equipped with optimized RFID readers can reliably perform inventory tasks in logistics environments, offering a scalable and flexible alternative to ground-based systems. The system’s adaptability also opens new possibilities for asset tracking, surveillance, and monitoring in outdoor depots, industrial facilities, and remote locations.
Key contributions of this work include: • the development of a novel, lightweight RFID reader optimized for UAV integration; • a robust methodology for evaluating read performance under dynamic flight conditions; • quantitative evidence of the impact of tag placement on read success; • and practical recommendations for flight planning and tag positioning in real-world logistics operations.
This research makes a significant contribution to the field by bridging the gap between RFID hardware development and aerial deployment. It provides a solid foundation for future innovations in autonomous inventory systems and offers actionable insights for both researchers and practitioners. While the experimental evaluation was conducted in a controlled environment with a limited set of variables, it provides a clear and reproducible baseline for understanding key factors influencing UAV-based RFID performance. Future work will focus on testing in metal-rich environments, expanding tag compatibility, and developing adaptive flight profiles that dynamically optimize readability in complex scenarios.
By addressing both the technical and operational dimensions of RFID-UAV integration, this study not only advances the state of the art but also delivers tangible value for modern industrial applications. Potential applications include inventory audits in outdoor depots, emergency asset tracking in disaster zones, and inspection of remote industrial sites, where ground-based systems are impractical.
Footnotes
Ethical Considerations
Not applicable. This study did not involve human participants, human data, or human tissue, and therefore did not require approval from an Ethics Committee or Institutional Review Board.
Consent to Participate
Not applicable. No human participants were involved in this research.
Consent for Publication
Not applicable. This manuscript does not include any individual person’s data, images, or videos.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Technology Agency of the Czech Republic (TACR) as part of the international project titled “Inventory Control Platform Using AI based Drone with inventory exploration and recognition” (Grant No. TM02000071), as well as TM04000003 “Development of autonomous driving smart air cleaner and safety control services platform for improving indoor air quality (IAQ) in industrial and public sites,” and the The Ministry of Education, Youth and Sports (Inter-Eureka programme) LUE231026 “AI-Driven Smart Safety Management System for Industrial Environments.” This work was also supported by the Student Grant Competition at VSB–Technical University of Ostrava in 2026 under project No. SP2026/054 “Simulation Platform for Sensor Selection and Optimization in Logistics and Occupational Safety within the Raw Materials Environment,” carried out at the Faculty of Mining and Geology.
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data Availability Statement
Data will be made available on request.