
Abstract
The question of whether multilevel buildings are memorized as volumetric map or collection of floors is central to spatial cognition and wayfinding studies about multilevel buildings. The stacked-floor buildings used in previous studies may limit people’s ability to integrate floors into a volumetric mental map. In this study, we assessed wayfinding and cognitive performances of 31 participants in a multilevel shopping mall with five atriums which provided adequate visual access and smooth floor transitions. (1) In the wayfinding task, we observed path choice for 31 participants in this mall. The participants’ choice for all path segments, also vertical path segments, clearly gravitated toward the most accessible spaces in the whole building, rather than most accessible space within individual floors. (2) Participants were also asked to identify the locations where they can see maximum number of stores. The identified locations can be reliably predicted by objectively measured three-dimensional visibility information, but not two-dimensional visibility information. (3) In the pointing task, participants can accurately point to out-of-sight targets in the same floor and in the different floor, in both azimuth and elevation direction. In sum, those findings suggest that people can memorize a multilevel atrium building as a volumetric map. This study also demonstrates the usefulness of developing three-dimensional configurational variables to explain human spatial behavior and spatial cognition.
Introduction
Wayfinding and spatial cognition for multilevel buildings
People often face the challenges of finding their ways inside multilevel buildings, such as meeting a friend in a shopping mall, finding a classroom in an academic building, or seeing a doctor in a hospital. The growing body of studies in multilevel buildings has provided some new conjectures about how humans understand three-dimensional (3D) spaces.
People need spatial knowledge of the buildings to address wayfinding challenges. The spatial knowledge is often distinguished into three levels: landmark knowledge, route knowledge, and survey knowledge (Siegel and White, 1975). Landmarks are distinctive objectives or places which are easy to be remembered. Route knowledge consists of travel paths, which often connect two or more landmarks. Survey knowledge integrates route and landmark knowledge within a common frame of reference; it is map-like knowledge about the whole building. People’s survey knowledge can be demonstrated by the ability to take shortcuts, or directly point to out-of-sight targets in 2D spaces, such as single-floor buildings and urban environments. The development of knowledge from landmark, to route, and then survey knowledge are not necessarily sequential. People can build up inaccurate yet gradually improving survey representations since initial exploration of new environment (Montello, 1998; Montello et al., 2004).
It has been argued that survey knowledge of 3D spaces is different from that of 2D horizontal spaces. People memorize multilevel building as a collection of floors rather than a fully integrated volumetric map (Jeffery et al., 2013). It has been argued that a fully integrated volumetric mental map has inherently much more information than a planar representation. Thus, the extra computational complexity of a fully 3D volumetric mental map is burdensome and inefficient for human brains (Jeffery et al., 2013).
There are also some empirical evidence supports this option. Wayfinding involving vertical travel often results in disorientation (Soeda et al., 1997). In a virtual environment, wayfinding performance was compared between the participants with the aid of two types of digital map: 2D maps with a top-down view and 3D maps with a bird’s-eye view (Li and Giudice, 2013). The participants aided by 2D maps were more accurate in locating targets than those aided by 3D maps. Furthermore, during wayfinding tasks in a multilevel conference building, participants preferred to solve the vertical component before the horizontal one, a strategy that led to shorter navigation routes and times (Holscher et al., 2006). Those participants essentially reduced the 3D wayfinding task into a 1D (vertical) followed by a 2D horizontal task (Jeffery et al., 2013). In another study, 24 college students learned two separate routes in a large multilevel building. Two routes were located one above the other but not visually connected. After learning two routes, participants were then given verbally description of the relationship between two routes. The pointing task is more accurate and faster when pointing to targets located in the same route (mean pointing error is 35°) than in the other route (mean pointing error was 58°) (Montello and Pick, 1993).
Yet the generalization of those empirical findings should be limited to specific multilevel buildings. The buildings used in those studies predominantly consist of stacked floors, such as normative office tower. The floors have no openings to support any visual connection across floors. Furthermore, the enclosed staircases in those buildings—as main vertical circulation elements—also limited the visual connection to other floors when people use them. Whereas lack of visual connections in stacked-floor buildings may explain those buildings were memorized as collection of floors; multilevel buildings with atriums may provide adequate visual connection between floors, therefore facilitate the development of volumetric mental map. However, how people memorize atrium buildings has not been studied yet.
Space syntax and wayfinding strategy
The space syntax theory also contribute to spatial cognition and wayfinding research by providing description systems that capture behaviorally and psychologically relevant properties of space (Zimring and Dalton, 2003). The space syntax theory has introduced quantitative description of individual spaces within a large network of spaces based on graph theory (Hillier and Hanson, 1984; Turner, 2003). A spatial system can be represented as a graph consisting of nodes and edges (Freeman, 1979). All individual spaces of a system form the nodes; the mutual connections (either physical or visual connections, such as an intersection between two corridors, or a doorway connecting two rooms) between those spaces form the edges in a graph. The focus of space syntax theory is graph-based attributes. Two of the most important space syntax variables relating to wayfinding research are connectivity and integration.
Connectivity—or called degree centrality in graph theory—describes the number of spaces directly connected to a space. The information is immediately available when a people visit the space, thus it is a local measure. Integration—or called closeness centrality in graph theory—describes the total graph-based path distance one need to traverse from one space to reach all other spaces in a system. Integration describes the relationship of a space to all spaces in a system, thus it is a global measure.
Some researchers have used space syntax to understand the way a person explores spaces or finds destinations and have established that navigators are sensitive to closeness centrality (or integration in space syntax) of spaces in 2D environment (Haq, 2003; Haq and Zimring, 2003; Peponis et al., 1990).
The pioneering and influential work was done by Peponis et al. (1990), who also suggested new method to collect wayfinding data. In that study, both unguided exploration and directed search tasks were observed for people who visit a hospital. The researchers assessed wayfinding behavior based on people’s walking routes which were not on the shortest path to reach a target in the building. It was called “redundant path” in their study. The redundant path use during both tasks strongly gravitated to the spaces with high integration value, i.e. the most accessible and central space in the building. It suggested that people are sensitive to global centrality of 2D spaces, even in the absence of perfect survey knowledge.
The empirical findings that people favor the most accessible spaces also echoes with skeleton wayfinding strategy (Kuipers et al., 2003). People memorize a set of major paths better than minor paths, thus heavily rely on those major paths in wayfinding tasks. The major paths can be assessed by the topological boundary relations between all paths. Thus, the integration measure of space syntax objectively identifies a set of major paths according to skeleton wayfinding strategy. However, it is not clear whether the skeleton wayfinding strategy remains pertinent in 3D buildings.
Visual access
Furthermore, visual access is another environmental factor that can facilitate wayfinding behavior. Visual access to other parts of the building provides additional information about the pathways and other landmarks (Gaerling et al., 1983). This information in turn may be remembered and used in learning the environment and finding target locations. The visibility of building elements (Braaksma and Cook, 1980; Churchill et al., 2008; Lam et al., 2003), landmarks (Omer and Goldblatt, 2007), and corridor intersections (Haq, 2003; Haq and Zimring, 2003) affects wayfinding behavior in different settings.
A number of architectural studies have already developed various methods of visibility analysis, including isovist, isovist field (Benedikt, 1979), visibility graph analysis (Turner et al., 2001). Nevertheless, most of them focus on generic visibility, which is visibility to all open spaces or partition walls. A targeted visibility analysis focusing on a prespecified set of visual targets may better explain people’s spatial behavior (Lu and Peponis, 2014; Lu and Seo, 2015; Lu and Zimring, 2012). However, those visibility analysis methods are limited to 2D floor plans. Recently, visibility graph analysis has been extended to modeling 3D visual relationships in multilevel buildings (Varoudis and Psarra, 2014), but it has not yet been tested in wayfinding or spatial cognition studies.
The current study
The controversial question remains open: whether 3D building is memorized as a collection of floors or a volumetric whole. Existing empirical studies have focused on the multilevel buildings with little or no visual connection between floors. People have to learn those buildings floor by floor, and thus limit their ability to integrate floors into a volumetric map (Thibault et al., 2013). The barriers to expanding knowledge were partially methodological: few tools have been developed to describe behaviorally and psychologically relevant properties of spaces on the multilevel building scale.
It is hypothesized that people can memorize a multilevel building as a volumetric whole if the building provides adequate visual access among floors and smooth vertical transportation. The current study explored how people memorize a multilevel shopping mall satisfying those criteria. We assessed people’s wayfinding and spatial cognition with three tasks.
Searching for target stores. The first task is to observe participants’ wayfinding path choice to reach a destination. The wayfinding paths is commonly analyzed with its distance, speed or distance divided by length of the shortest possible routes to assess the wayfinding difficulty. We are more interested in the obvious detours taken by people or referred to as redundant paths (Peponis et al., 1990). We try to find whether the locations of those detours relate to how people understand a multilevel building. If the redundant paths gravitate toward central spaces in the whole building, it indicates people are sensitive to 3D centrality of spaces in a multilevel building. If the redundant path choice gravitates toward central spaces in individual floors, it indicates people are sensitive to 2D centrality of spaces. Finding vantage locations. We proposed another way to explore this issue by testing participants’ ability to identify vantage locations from which they can maximize number of visible stores across different floors. The task is mentally demanding since people cannot visit and compare every space in this mall. To be success in the task, people should remember volumetric perceptual information (i.e. shops in different floors) from previously visited locations, and project what might be visible from an unvisited location. The projection of perceptual information requires the manipulating of volumetric spatial knowledge. If people perform well in this task, it may indirectly support that people can project perceptual information, thus possess a volumetric mental map. Direction pointing to out-of-sight targets. The first two tasks may answer if people are sensitive to 3D centrality or 3D visibility; they did not directly prove if people had a volumetric mental map with metric and direction information. To address this issue, we asked participants to point to targets in the same floor and in different floors. If people memorize building as a collection of floors, pointing to targets in different floors would be less accurate than to targets in the same floor (Montello and Pick, 1993). If people memorize building as a volumetric map, the pointing performance for both tasks should be equally accurate.
In addition, to help explain participants’ performance in those tasks, we also developed or fine-tuned several syntactical spatial measures based on 3D accessibility and 3D visibility.
Methods
This study measured people’s spatial cognition based on two cognitive tasks and wayfinding behaviors of participants in a multilevel building, as described in other studies (Holscher et al., 2006; Montello and Pick, 1993; Peponis et al., 1990). This study considered both behavioral variable and formal analysis of building design based on space syntax.
Setting and participants
The study was carried out in a large shopping mall in Hong Kong. It comprised approximately 220 stores in seven floors, with a total retail floor area of 91,000 m2. The experiment was carried out in the upper six floors only, because the lowest floor was mainly occupied by one large supermarket and had limited open space for navigation. There were five atriums, two of which were six-floors tall and provided adequate visual access to different floors (Figure 1). The 22 dual escalators with both ascending and descending moving stairs and two open staircases in the mall provided adequate physical connections among different floors. Furthermore, the mall is positioned as a “comfortable” middle-market mall, and crowding generally did not affect wayfinding behavior.
Indoor view of one atrium in the experiment setting: a large shopping mall in Hong Kong. The atrium has adequate visual access and vertical connections (mainly 22 dual escalators) across different floors.
In this experiment, 31 participants carried out wayfinding tasks and direction pointing task, and 19 of them performed an additional task of finding vantage locations. The participants were college students between 18 and 22 years of age, with approximately equal numbers of men and women.
Procedure
Participants were tested individually. All tasks were conducted on weekday mornings to avoid any potential effects of crowding. The participant and researcher walked to the same starting location at the beginning of the experiment.
Search for target stores
The first task was to find six stores sequentially. The target stores were evenly distributed throughout the building, i.e. there was one target store on each of the six floors, and the six stores were spread out horizontally. The target stores were also relatively small and with low-profile brands. During the entire experiment, the participants were not allowed to use floor maps or ask other people for advice. They were allowed to use signs or any other distinctive features, such as atriums and windows, as clues to find their way. All the participants started at the same location and received the target stores in the same order; each destination point was the start location for the following wayfinding task. The participants were followed by one researcher, who recorded the participants’ walking paths on floor plans.
Pointing to unseen targets
After finishing their wayfinding tasks, the participants were taken to three locations in the mall. In each location, they were asked to point to two previous-visited stores: one located in the same floor and the other in the different floor. Participants were first asked to indicate azimuth with a compass provided by the researcher. They were promoted “pointing straight to the target with the compass” and “just indicate the 2-dimensional direction, ignoring any difference in floors.”
Then participants were asked to response if a store is in the same floor or in a different floor. If participants answered it was in a different floor, then they were asked to indicate elevation angle with a level angle app with a smartphone provided by the researcher. They were promoted “pointing straight to the target” and “also considering the difference in vertical angle.” The level angle app was tested for accuracy and reliability before the experiment.
The azimuth angle and elevation angle, if any, were recorded by the researcher. In total, the participants pointed to six stores: three stores in same floor and three in different floor.
In the analysis, absolute pointing error in angles was used to indicate the performance in the pointing task. Azimuth error and elevation error were separately calculated.
Finding vantage location
After finishing the pointing tasks, participants were tested the task of finding vantage location within the mall. They were asked to “go to the location from which you could see the maximum number of stores with a 360° view, including stores in different floors.” They were not asked to identify the location from which they could see the maximum floor areas, because the stores were salient and were closely related to their first wayfinding tasks and may have been easy to cognitively register (Lu and Peponis, 2014). Due to accidental data loss, only 19 out 31 records were available. In the analysis, the locations from which the participants identified the maximum number of visible stores were also recorded and tested against objectively measured visibility variables (Figure 2(b)).
(a) Three-dimensional closeness centrality for path segments, which is defined as reciprocal of sum of its topological distance to all other segments. (b) Two-dimensional closeness centrality based on segments in individual floors only. Legend: Thicker and darker lines represent segments with higher values. Note: Heights of all 3D models are scaled to a factor of five for purposes of clear illustration.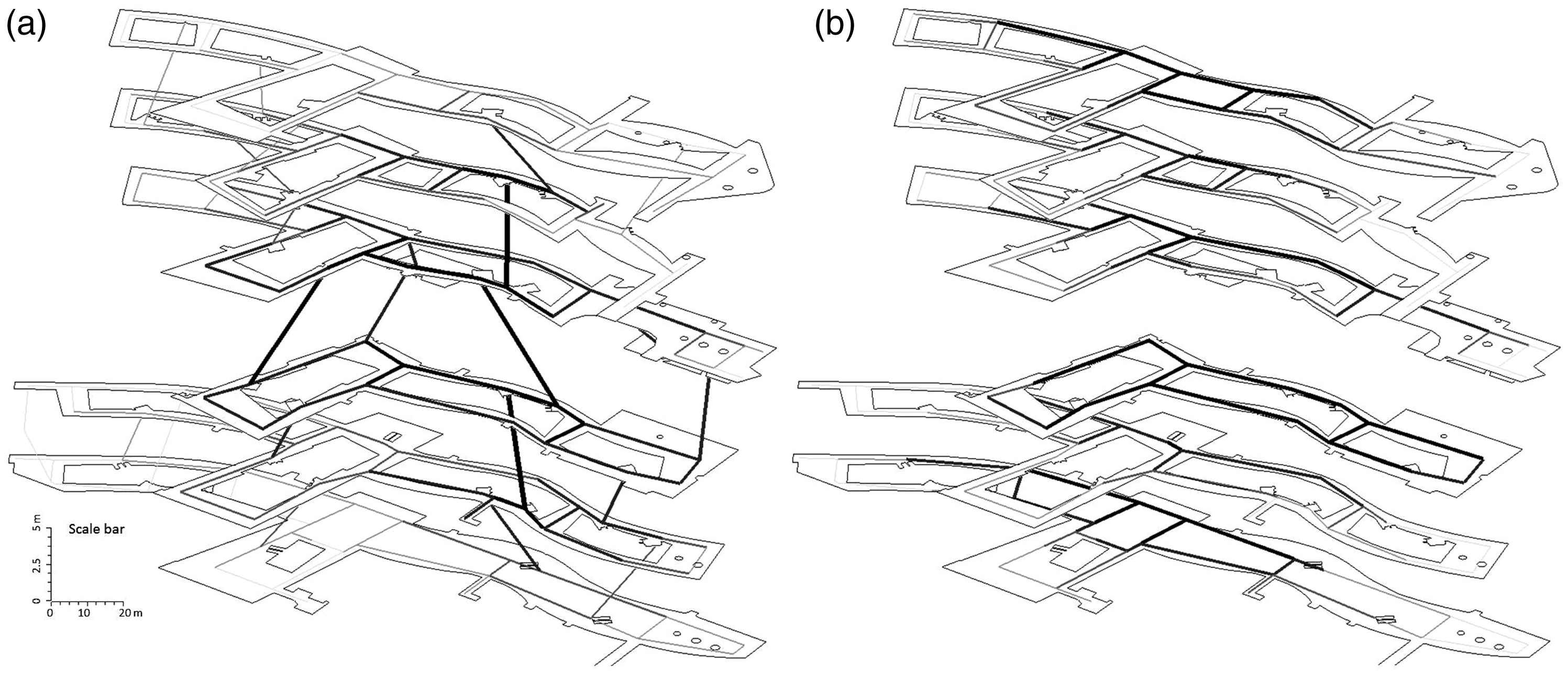
Configurational variables
Two sets of units of analysis were adopted for this study: path segments for topological relationships and a grid of points for visibility information.
Path segment analysis
A path segment is a section of a route between two decision points (e.g. three- and four-way intersections or a location where a navigator can use a vertical connection such as an escalator, staircase, or lift). Using this definition, the entire system of corridors and vertical connections within the mall was decomposed into individual path segments (Figure 5). The unit of analysis was a path segment. The path segments instead of axial lines were used as the unit of analysis to address the limits of axial lines, such as their arbitrary construction (Hillier and Penn, 2004; Ratti, 2004a, 2004b).
All path segments were treated as one connected “edge-node” graph, with path segments as nodes and intersections between two or more segments as edges. The 3D closeness centrality of a segment i is defined as the reciprocal of the sum of shortest topological distance to all other segments (see formula below). In essential, 3D closeness centrality is similar to integration in space syntax. Three-dimensional closeness centrality of every segment in the mall was measured and visualized with a python script written by the author (Figure 2(a))

For comparison, the 2D closeness centrality was computed. The 2D closeness centrality of segment i is defined as reciprocal of the sum of its shortest topological distance to all other segments in the same floor. Two-dimensional closeness centrality of every segment (excluding any vertical segments) was measured and visualized with a python script written by the author (Figure 2(b))

3D visibility analysis
For visibility analysis, we used grid of points with equal spacing as a more fine-grained representation of space. The approach extends from 2D visibility graph analysis (Turner et al., 2001) and 3D visibility graph analysis (Varoudis and Psarra, 2014).
First, a grid of observation points with even spacing (2 m × 2 m) was superimposed on all public spaces of the six floors, excluding spaces within stores, in a 3D digital model of the building in Sketchup15 (Trimble Navigation Limited, California). Those points were located 1.6 m above each floor level to reflect human eye height when standing. The visibility (true or false) among all points was calculated with a ruby script in Sketchup (Figure 3). All points were regarded as nodes in a graph, and the visibility between a pair of points was treated as a link.
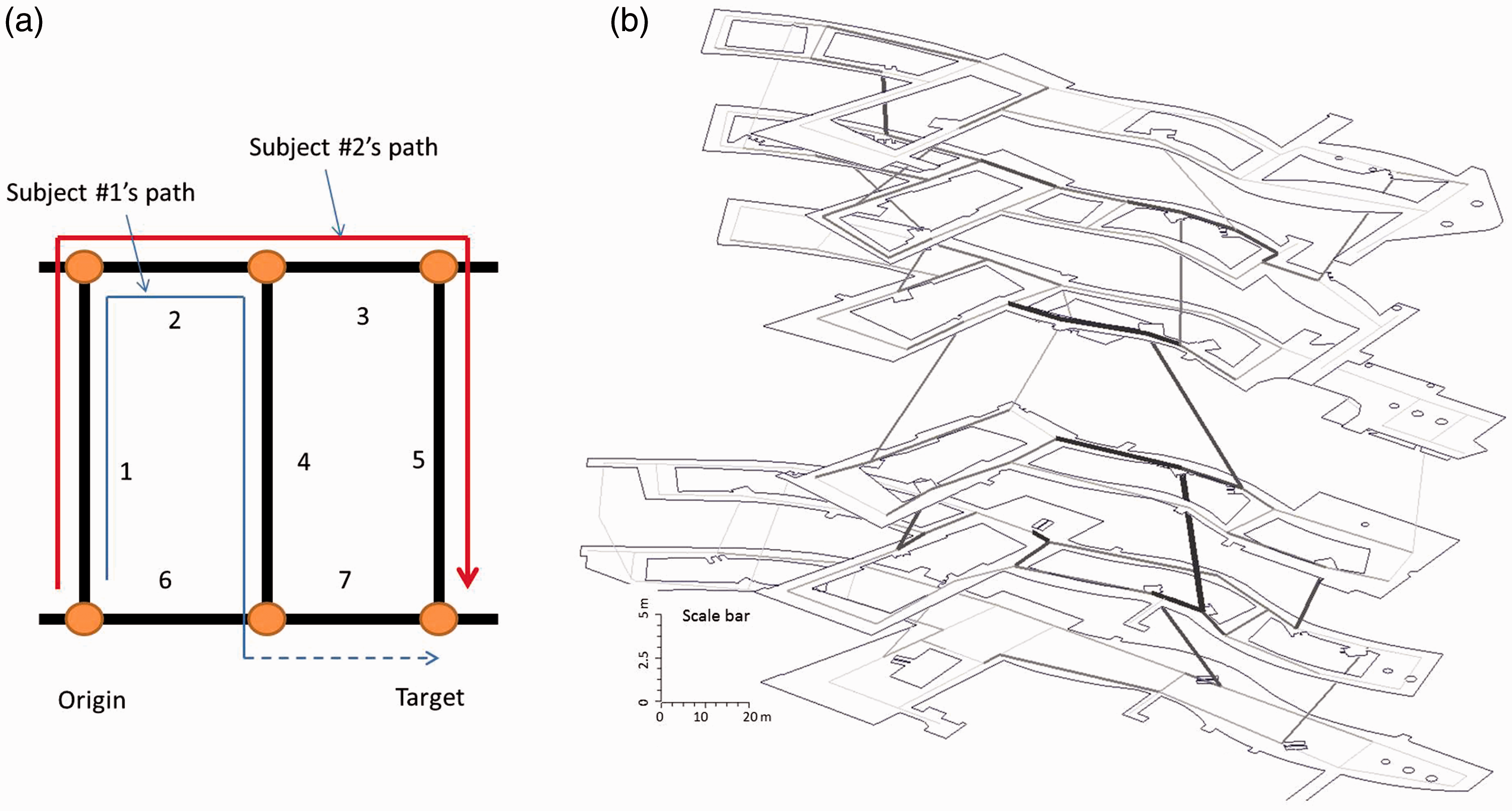
Grid of observation points was superimposed on public spaces in digital model of building in Sketchup. Those points were located 1.6 m above floor. Visibility (true or false) among all points was calculated with ruby script in Sketchup. Note: Only six observation points are shown for illustration purposes. (a) Three-dimensional store degree centrality, defined as total number of visual stores, including all floors. (b) Two-dimensional store degree centrality, defined as total number of visual stores in the same floor of an observation point. (c) The difference between 2D and 3D store degree centrality. (d) Vantage locations selected by 19 participants from which they can see maximum number of stores. Note: Heights of all 3D models are scaled to a factor of five for purposes of clear illustration. (a) Example of redundant use: A path segment is a section of a route between two decision points (e.g. three- and four-way intersections or a location where a navigator can use a vertical connection such as an escalator, staircase, or lift). Using this definition, the entire system of corridors and vertical connections within the mall was decomposed into individual path segments: segment 1–7. (b) The total redundant use for each path segment by 31 participants and all wayfinding tasks in this study. Thicker and darker lines represent segments with higher redundant use.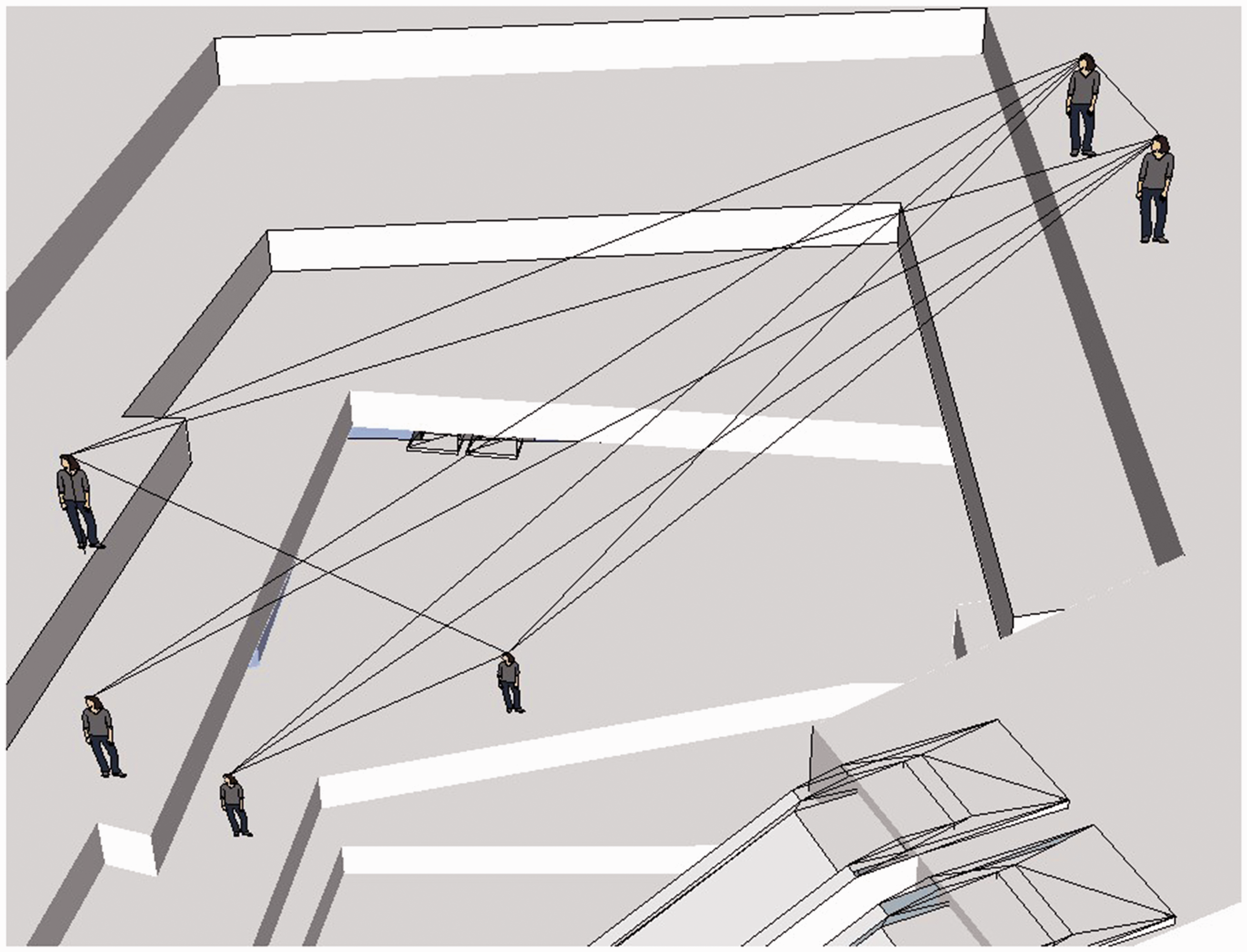
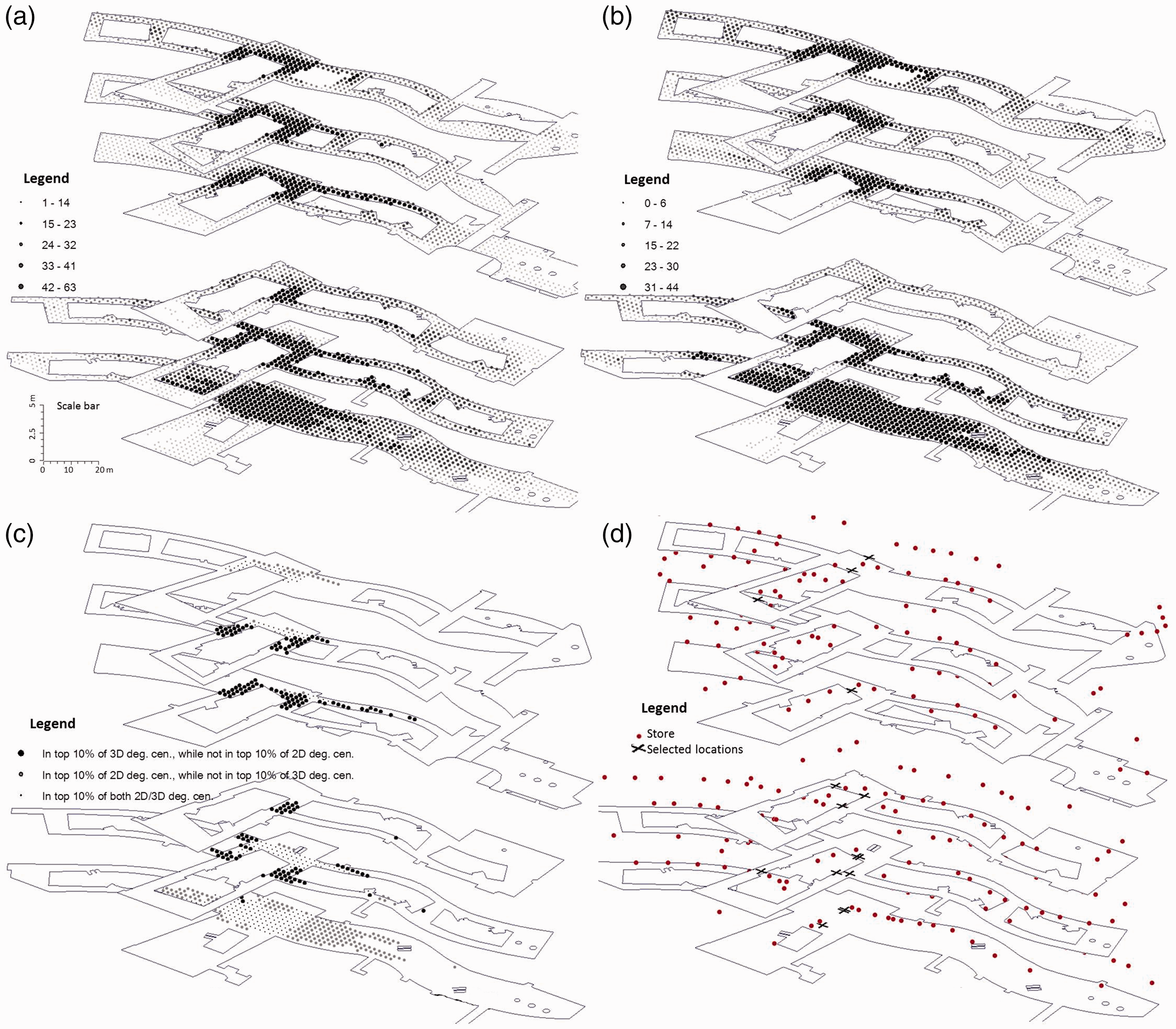
A targeted visibility analysis focusing on all stores as a set of potential targets was computed (Figure 4). The method extends from 2D targeted visibility analysis (Lu and Peponis, 2014; Lu and Seo, 2015; Lu and Zimring, 2012). The center point of each shop’s sign was treated as a potential target. A store was considered visible if the center point is visible.
The 3D store degree centrality of a point i is defined as the total number of visible stores, including stores in different floors (see formula below). It was computed and visualized with a python script written by the authors (Figure 4(a))

By comparison, the 2D store degree centrality of a point i is defined as the total number of visible stores in the same floor of point i (see formula below). It was computed and visualized with a python script written by the authors (Figure 4(b))

Results
All behavior and configurational data obtained from direct observation and spatial analyses were analyzed with SPSS 22 (IBM, New York).
Search for target stores
In the analysis, we assessed redundant paths, which are the parts of the paths that were not on the metrically shortest paths between a start location and a destination. The unit of analysis was path segments. Figure 5(a) gave a simple example. The path network in one building can be decomposed into segments 1–7. The metrically shortest path from the origin and the target comprises segment 6 and 7. The redundant path is the parts of the walking paths that were not on segment 6 and 7. Thus, the redundant path for Subject #1 consists of segment 1, 2, and 4; the redundant path for Subject #2 consists segment 1, 2, 3, and 5. The total redundant use for segment 1 is twice and that for segment 5 is only once. In this study, the total redundant use for each path segment was calculated as dependent variable for all 31 participants and all wayfinding tasks (Figure 5(b)).
Summary of hierarchical regression analysis for variables predicting redundant use of path segments (N = 201).
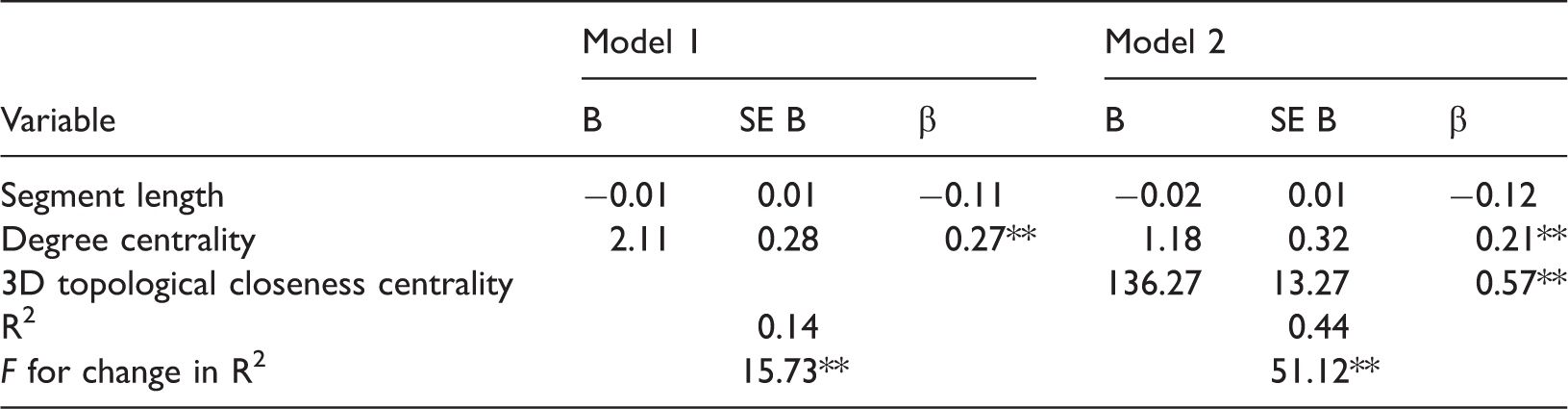
p < 0.01.
Summary of hierarchical regression analysis for variables predicting redundant use of vertical path segments (N = 24).
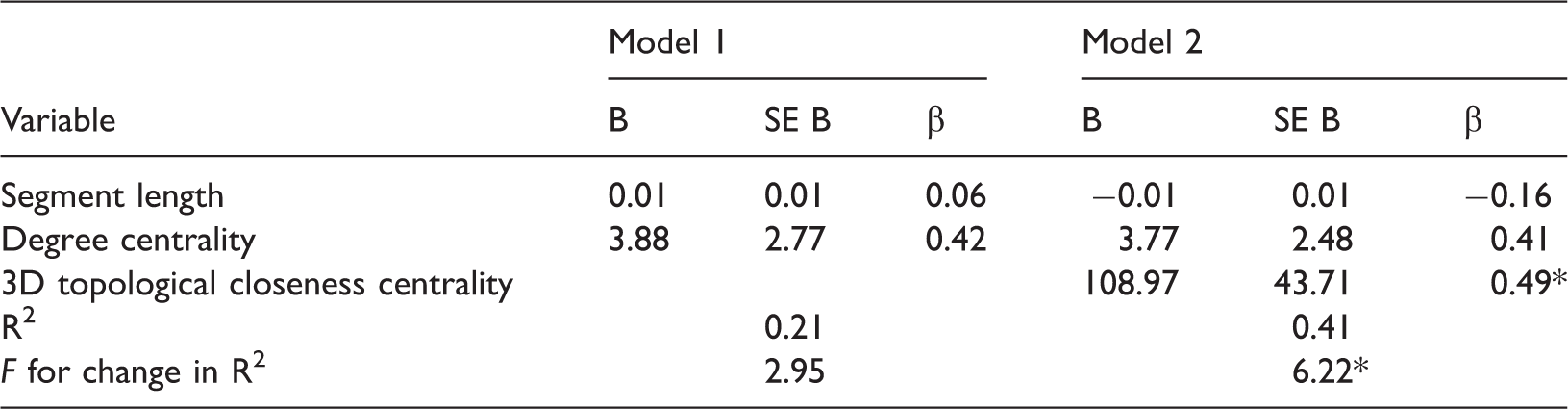
p < 0.05.
By comparison, the 2D centrality of path segments was also analyzed with same two-step hierarchical regression. In the second step, the 2D topological centrality of path segment was entered into model 2 instead. However, the F change was not significant. It indicated that after holding degree centrality and length constant, 2D topological closeness centrality was not associated with redundant path segment use.
The results confirmed our first hypothesis. People gravitated toward central spaces and central vertical spaces in the whole building, rather than central path in separated floors.
Pointing to unseen targets
Absolute pointing error in angles was used to indicate the performance in the pointing task (Figure 6). Azimuth error and elevation error were separately calculated. The majority of participants’ responses (91.5%) correctly stated that target stores were in the same floor, thus elevation pointing error for target store in the same floor was excluded from the main analysis.
The pointing error for targets in same or different floor, and in azimuth direction and elevation direction. There was no significant difference for pointing to targets in same floor or in different floor. There was no difference for pointing in azimuth direction or in elevation direction.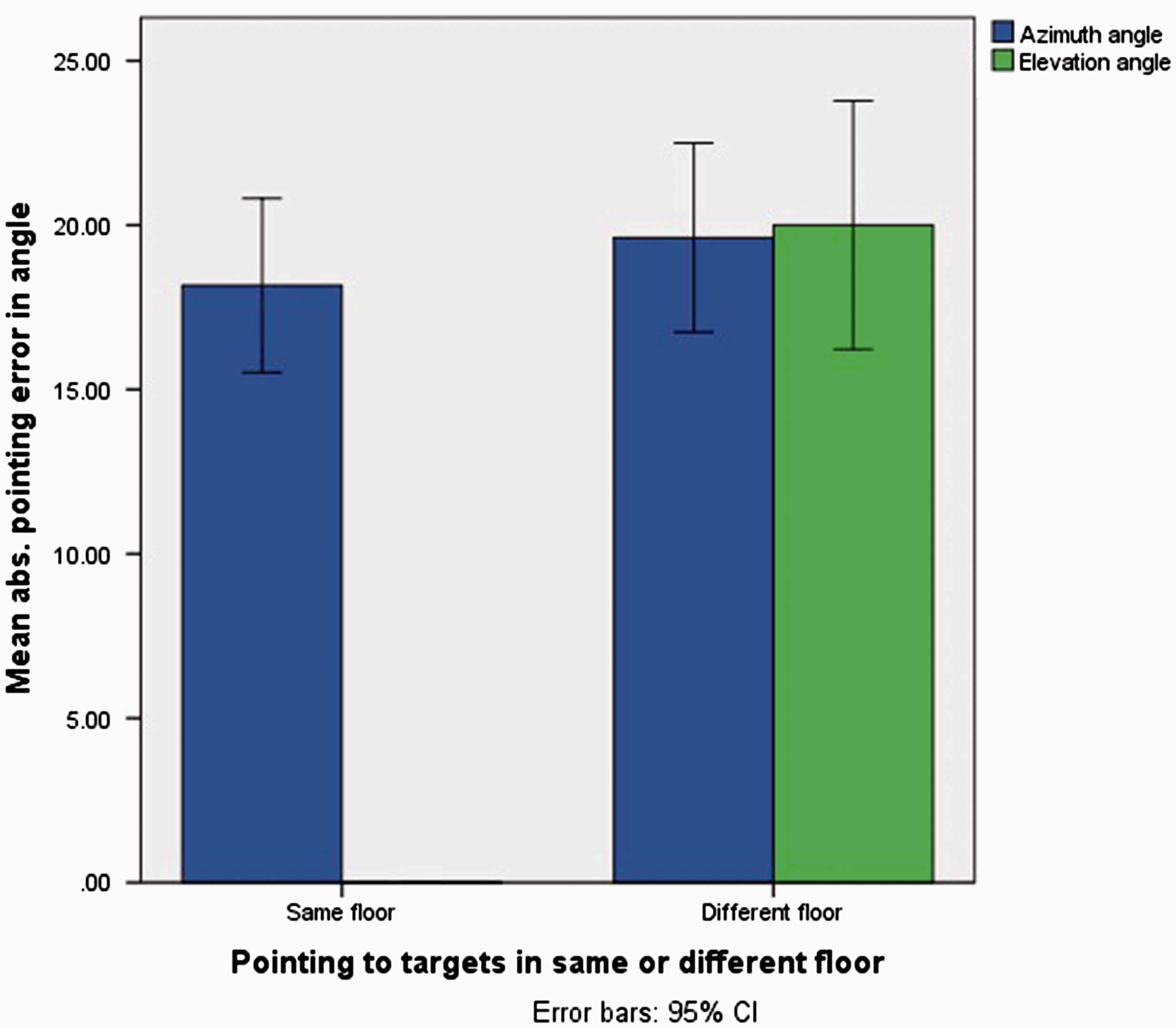
Participants accurately pointed to targets in both azimuth direction (mean error = 18.9°, SD = 15.1°) and elevation direction (mean error = 20.0°, SD = 20.6°). A paired t-test showed azimuth pointing error did not significantly differ from elevation pointing error when pointing to targets in different floors, t(116) = −0.15, p = 0.87.
Participants can also accurately point to target store located in both same floor (mean error = 18.2°, SD = 14.4°) and in different floors (mean error = 19.6°, SD = 15.7°) regarding azimuth direction. An independent t-test showed that pointing error did not significantly differ for pointing to targets in the same or different floor, t(232) = −0.74, p = 0.46.
As hypothesized, pointing performance was markedly accurate for targets located in same and different floors, in both azimuth and elevation direction. This result indicated that our participants had a reasonable level of survey knowledge of the whole building, and thus they may memorize the building in a volumetric mental map rather than a collection of floors.
Furthermore, the pointing direction—both azimuth direction and elevation direction—exhibited systematically errors. The azimuth direction gravitated toward the geometric center of floor plans (Figure 7(a)). The pattern applied for both target in the same floor and different floor.
The pointing direction exhibited systematically gravitation. (a) Building plan: The azimuth direction gravitated toward the center point of floor plans. (b) Building section: If the real elevation direction to the target was smaller than 45°, participants overestimated it. (c) Building section: If the real elevation direction to target was larger than 45°, participants underestimated it.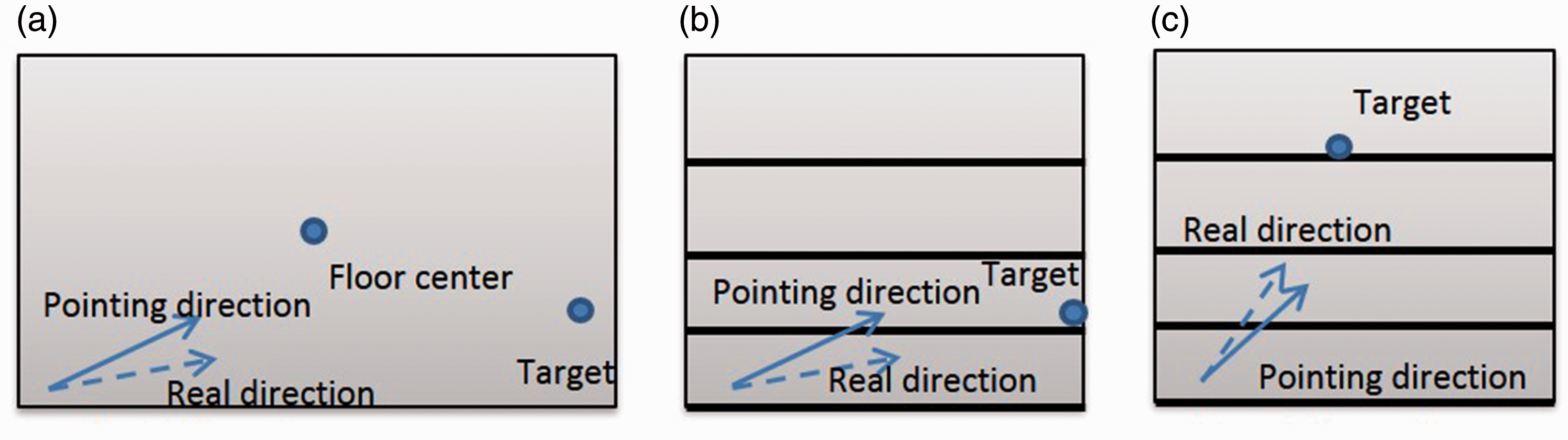
The elevation direction, however, exhibited a different pattern of gravitation (Figure 7(b) and (c)). The elevation direction gravitated toward the elevation angle of 45°. More specially, if the real elevation direction to the target was smaller than 45°, participants overestimated it; if it was larger than 45°, participants underestimated it. The systematic errors in estimating pointing direction indicated that participants may use certain heuristic—gravitating to the center—to minimize the pointing error, albeit the center was defined differently in horizontal and vertical directions.
Identifying vantage locations
Logistic regression analysis to predict if points were selected by the participants as vantage locations for maximizing visible stores.

The Wald criterion demonstrated that only 3D store degree centrality made a significant contribution to prediction (p < .001). Two-dimensional store degree centrality was not a significant predictor (p = .861). Exp(B) value indicated that when 3D store degree centrality was raised by one unit (one store) the odds ratio was 1.129; therefore points were 1.129 more times likely to be selected as vantage locations by our participants.
The results confirmed our third hypothesis: the participants were sensitive to volumetric visibility in the task. Their chosen location can be predicted by the objectively visibility variable—3D store degree centrality.
Discussion
As outlined in “Introduction” section, the central question about spatial cognition of multilevel buildings is whether floor plans are represented separately or are fully integrated in a volumetric mental map. Some researchers advocate that multilevel buildings are memorized as a collection of floors because a full volumetric representation is burdensome for human brains to handle (Jeffery et al., 2013). Some empirical studies also support that people memorized multilevel building as collection of floors. For example, people pointed more rapidly and more precisely toward a target that was located within same floor of the people, rather than in different floor (Montello and Pick, 1993). People who were familiar with a multilevel conference center replied on the strategy of finding one’s way to the floor of the destination first (Holscher et al., 2006).
The three major findings from the present study, on the contrary, suggest that people may alternatively memorize multilevel atrium building as a volumetric map.
During the wayfinding task of finding target stores in the shopping mall, people favored globally central spaces in the whole building, rather than central spaces in individual floors. The global centrality of a space was defined as sum of its topological distance to all other spaces in this study (3D closeness centrality or integration in space syntax). The result stood after controlling for local characteristics of spaces, such as segment length and degree centrality (or connectivity in space syntax).
We assume people tend to choose the metrically shortest paths if they have perfect survey knowledge of the building. When they had no perfect survey knowledge and deviated from the shortest paths in wayfinding tasks—as our participants showed—they may rely on the heuristic of gravitating toward central spaces. The participants’ collective search pattern aligns with skeleton wayfinding strategy found for 2D spaces that people rely on major paths and then branch out to minor paths in wayfinding task (Kuipers et al., 2003; Peponis et al., 1990).
In addition, we found that people also favored globally central escalators and stairs in this mall (i.e. vertical path segments in the analysis), after controlling for local characteristics. The result supports that people may be capable of distinguishing 3D centrality for vertical paths.
Overall, people gravitated toward central paths as well as central vertical paths in the mall. People are sensitive toward 3D centrality of spaces in this multilevel building, even without perfect survey knowledge. Nevertheless, it still did not directly support people had volumetric mental map.
We also asked people to finding vantage locations from which they can maximize visible store. Unlike the computer program written to address this issue, it is impractical for a person to visit and compare every space in the mall, considering the size of the mall. People need to anticipate what might be visible from unvisited locations, and it is open to correction after test. The anticipating of 3D perceptual information requires the manipulating of survey knowledge as volumetric map, not a collection of floors. Thus, this task involves processing accumulated date as well as building expectations to test.
The results showed that people’s chosen location can be predicted by the objectively measured visible stores in all floors, rather than visible store in individual floors. The result confirms the findings of previous studies based on 2D spaces in which people were able to identify locations that maximized visible targets (Lu and Peponis, 2014) or generic spaces (Franz and Wiener, 2008).
It seems that people can remember, anticipate, and compare 3D perceptual information in a multilevel building. Our participants’ good performance also indirectly supports that they may successfully project perceptual information.
The performance of pointing task probably provided the most solid and direct evidence to support people can memorize multilevel building, or at least this shopping mall, as volumetric map. People were asked to pointing to target stores in same floor and in different floors, in azimuth direction and elevation direction. People’s performances were markedly accurate, with mean absolute pointing error of approximate 20°. There was no significant difference for pointing to targets in same floor or in different floor. There was also no difference for pointing in azimuth direction or in elevation direction. The result demonstrated that people acquired considerable volumetric survey knowledge in this multilevel building.
Furthermore, we also found that people’s pointing direction in this mall is systematically deviated from the actual direction. More specifically, azimuth direction gravitated toward center point of floor plans, while elevation direction gravitated toward the direction of 45°. The results may reflect a general tendency for making errors in the directions toward the center point of space, for both horizontal and vertical direction. Further studies are needed to clarify this issue.
In sum, our participants were sensitive to 3D centrality of spaces, can anticipate perceptual information, and developed considerable volumetric survey knowledge in this mall.
Our findings largely contrast to two empirical studies (Holscher et al., 2006; Montello and Pick, 1993). We believe that building design is a moderator on how people memorize a multilevel building. As we mentioned, most empirical studies used particular type of multilevel building. Those stacked-floor buildings have no visual connections between floors. Furthermore, the staircase in those building—as main vertical circulation elements—also limited the integrated spatial knowledge from different floor, because participants tend to lose their orientations while using a staircase (Holscher et al., 2006).
The findings that the building is memorized as a collection of floors may be explained by the lacking of visual connections between floors, rather than people’s spatial inability to integrate floors into a volumetric map. A recent lab experiment supports that people can integrate vertical spatial information reasonably well (Thibault et al., 2013). They test the effect of learning condition on the performance of recalling relationships between landmarks in a virtual building. Participants were assigned to two learning conditions, by viewing travel either along horizontal corridors or via simulated lifts between floors. The results demonstrated no advantage for recognition landmarks in the same floor compared to landmarks in different floor.
In this study, we tested people’s wayfinding and cognitive performance in a multilevel atrium building, which significantly differed from stacked-floor buildings. In the mall, there are multiple atriums providing adequate visual connections of different floors. There are also multiple escalators—as main vertical circulation elements—interfaced with atriums, smoothing the integrating of spatial knowledge from different floors. Hence, both the presence of visual opening and smooth floor transition support the development of volumetric mental map.
Strength and limitation
There are both strength and limitations in this study. This is the first study, to our knowledge, correlates wayfinding and cognitive performance with 3D syntactical methods. Human spatial behavior and cognition are often influenced by the shape and configuration of environments (Haq, 2003; Haq and Zimring, 2003; Peponis et al., 1990; Zimring and Dalton, 2003). Research benefits from rigorous description systems capturing behaviorally and psychologically relevant properties of space (Zimring and Dalton, 2003). In this paper, we extend or develop several syntactical variables that capture 3D topological and visual information of the configuration of multilevel buildings. Those measures are suitable for other studies in the fields. Yet there also some limitations in this study. Human cognitive ability may be adaptable to a wide range of 3D spatial environments. It is possible people may represent multilevel buildings as volumetric map or collection of floors for different buildings, as argued in this study. Alternatively, people may maintain both a floor-based and volumetric mental representation for a building simultaneously, and the accuracy and completeness of which adjust to the environment. Further comparative studies, with varying degree of configurational complex and visual connections across floors, are needed to elucidate this issue. Furthermore, in one of the tasks in this study, path choice was used to understand how people understand a multilevel building. Making such inference of spatial cognition may be indirect, because the choice of path segment is not totally independent. The choice of certain paths may make choice of succeeding path more likely or inevitable. The issue of spatial autocorrelation has not been addressed in this study.
Footnotes
Acknowledgment
I would like to offer my special thanks to Dr John Peponis and Dr Christoph Hölscher for their valuable and constructive suggestions during the development of this research work. Their willingness to give time so generously has been very much appreciated.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work described in this paper was fully supported by the grants from the Research Grants Council of the Hong Kong Special Administrative Region, China (Project No. CityU11612615) and National Natural Science Foundation of China (Project No. 51578474).