
Abstract
Intelligent buildings require various gadgets and sensors to automatically control the underlying environments with enhanced levels of comfort and efficiency. The ever-evolving technology and increasingly complex devices operated by heterogeneous systems have created challenges for intelligent building environments. Multi-platform type of heterogeneous systems functioning in intelligent building environments can lead to system failures with regard to deadlocks and unpredictable behavior, known as conflict occurrence. In this paper, we propose a new decision-making model with a weighted-priority scheduling algorithm that solves the conflicts to achieve efficient and sustainable communication response among heterogeneous systems. The experimental results demonstrate the enhanced response time of the model with conflict resolution. Furthermore, this model minimizes the external intervention to control the setting of such buildings.
Introduction
In today’s ever more technology-centric world, the domain of intelligent building environments is becoming prevalent in the smart cities. An intelligent building consists of an automation system equipped with advanced sensors, automated devices, and electronics. Automation systems control devices and electric equipment in buildings or homes [8]. Such systems mainly cater for remote monitoring, care delivery, safety, detection of problems or emergency cases, and most importantly for automated living [10,15,43]. By increasing the number of advanced technologies in building environments, the operation of underlying systems grows to become more intelligent, usable, comfort and secure [4]. As such, many different devices and sensors are installed to improve the efficiency of the intelligent automation building. However, with the growth of devices and sensors in such environments, processing and managing of large quantities of events generated from these devices and sensors has been identified as one of the delicate challenges in an intelligent environment [31], particularly with heterogeneous systems [4].
A heterogeneous system is characterized by its versatility with regard to configuration, installation, and interaction [6,8]. In an intelligent building, devices and sensors are installed with various software, drivers, and services requiring to communicate with different operating systems (OS) and protocols. This in turn outlines an issue of inter-operation capability required between heterogeneous systems in an intelligent building. Perumal et al. [41] have quite recently proposed the Event–Condition–Action (ECA) based interoperability framework [41] to tackle this problem. However, conflict situations among heterogeneous systems in an intelligent building have been unmet in [41]. By increasing the number of devices and sensors in a building automation and multi-platform heterogeneity, many systems react beyond schedules of actions and decisions. These systems interact among devices with different actuators and sensors in a time domain. An automatic decision-making system controls inter-operation among the sensors and devices to determine what action should be triggered.
In an intelligent building, however, numerous actions may coexist, requiring distinct reaction that can conflict with each other. For instance, in the same time, one action may imply from fire alarm system while another may imply from a CCTV system. In an ideal world, this conflict should be resolved automatically in an intelligent automation building, which is currently not addressed by most of the available work in the literature. Inspired by this gap, a conflict resolution model based on weighted-priority scheduling is proposed in this paper. The proposed model is able to automatically detect and resolve conflicts among heterogeneous systems without any human intervention. In this model, when events are arrived simultaneously, the event with high weighted priority is triggered while the lower weighted events are queued based on weight and priority. The experimental results show that in spite of declining communication’s response time compared to the work in [47] which did not consider conflict resolution, the proposed decision-making model is able to detect and resolve the conflict to attain their automation systems and stable communication response.
Related works
The work given in this paper is related to areas of intelligent building (e.g. Sensor and technology aspects) and smart home (e.g. Inhabitant aspects). In this respect, this section presents previous works which have been expanded considerably in recent years in these areas.
Building automation system
Garg and Bansal [18] and Agarwal et al. [1] used occupancy sensors to increase energy saving of building automation systems. Similar to this work, several approaches have been proposed to develop Heating, Ventilation and Air Conditioning (HVAC) systems and efficient lighting [11,13,29,30,36]. Assessment and practical applications of these approaches can be found in [12,17,32,38,40].
In another work, a system was proposed by Furey et al. [16] to solve the weakness of real time location systems. This system uses artificial intelligence (AI) techniques for making sense of smart prediction of the future locations for the historical user location. Their proposed system was shown to be able to enhance real time location system in terms of accuracy, yield, cost, latency, and predictive ability. The authors concluded that their system could be useful in home and building automation system to contribute to an effective context prediction in replacement of movement sensor or conjunction [16].
None of the aforementioned work, in fact considers the conflict perception. However, intelligent environment should able to cope and manage any deadlocks or unpredictable behavior among heterogeneous systems in intelligent building. Conflict detection and resolution in an intelligent building and home is still a fairly new topic [45]. Several research studies in resource management and intelligent environments have discussed conflict detection and resolution. The conflict resolution of environments is a complex process and even it is a critical in multi-agent based intelligent environments [31]. Moreover, there is no single approach that can be applicable to solve all kinds of conflicts [24,51].
Agent-related conflict
Lee [31] proposed a model for multi-agent based using the concept of collaboration design to solve environmental conflicts among activities, users, and physical settings. In their model, an object agent is devised to modify the setting of environment through other agent with means of communication and collaboration. The authors tested a set of hypothetical cases to demonstrate the type of conflicts and their resolutions. The results presented in the work showed that their model can enable the environment as an organization of multiple agents to perceive the user activity more intelligently and efficiently [31].
Alshabi et al. [2] surveyed conflict resolution methods and agent cooperation models. In this work, the authors proposed a multi-agent architecture in which each agent chooses its balance between autonomy and cooperation independently. To solve the conflict among agents, they also suggested three negotiation strategies, including chaining, arbitrary leader election and cloning [2].
Jacak and Pröll [23] proposed a heuristic approach to manage conflicts in multi-agent systems. In their proposed approach, each agent is able to react and perceive to the environment to execute an action for negotiating with other agents. The negotiation and coordination of actions are primarily performed to attain the common global goal with the aim to resolve and avoid the conflict in an intelligent multi-agent system [23].
A context-aware multimedia presentation system was designed and proposed by Kung and Lin [28]. Their system provides a learning and prediction module with an adaptation mechanism to user’s needs based on context information. That is, whenever the contexts change, the system provides a mechanism for the best adaption control. In such system, a conflict is detected and handled on the basis of context’s priority and weight to achieve quality of service requirements [28]. Reinisch et al. [44] also proposed a comprehensive multi-agent system for an intelligent building to reduce the energy consumption without avoiding user comfort [44].
Intention and interest conflict
Tuttlies et al. [52] proposed a framework called COMITY, which uses a priority conflict detection and resolution. The resolution of conflicts in their approach is carried out through conflict avoidance, which results from responses of applications to different user interests. In COMITY, the conflict manager is based on a context model that is fed from the information available in database to detect and adapt the application at the run time [52].
In another work, Armac et al. [4] specified component as services. Each service contains actions that indicate the state of the transition on resources. In this work, a conflict is detected when a service tries to transit a resource from one state that is previously set by another service. Whereas, a conflict is resolved based on the rule-based mechanism and priority [4].
A dynamic conflict resolution of various context-aware applications in intelligent environments was proposed by Park et al. [39]. The authors integrate user’s preferences and intentions as the value that can be assigned to a context attribute by actions that demand from application and express user intentions. This is defined as a cost function measured by the distance between resolved value and user preference. The resolved value is further verified based on information that minimizes all the user’s cost that is involved in conflicts [39].
Silva et al. [48 ,49] proposed a methodology based on client-server architecture model to detect and solve conflicts. This model configures and selects the suitable conflict resolution algorithm. The decision model used is based on application’s demand for resource consumption and quality of services. The quality of service is the satisfaction of users on the subject of achieving resolution result [48,49].
Resource conflict
Retkowitz and Kulle [46] argued that the conflicts among users require to be resolved by users manually. In this regard, they proposed an approach that considers dependencies between services that recognized as binding. In this work, binding policies, handling service bindings, constrains, and access control in a smart home are defined based on priority group [46].
In a similar work, Huerta-Canepa and Lee [22] proposed a resource management schema based on ad-hoc interaction for smart spaces. Their work is built on the assumption that only two tasks can execute at each time. However, avoiding conflict in this work is done through device control and conflict resolution is performed based on the execution cost of a given task rather than current task, i.e. the utility and user priority at resource level [22].
Policy conflict
As mentioned in [26], policies and priority schema with rules among entities are the common conflict resolution techniques that establish acceptable system behaviors for a given situation.
Syukur et al. [50] presented a strategy to detect and avoid conflicts based on context change in order to control the application behaviors. Their proposed strategy depends on the system’s situation with respect to considered context, the number of users, and type of services. The authors argued that the conflict detection and resolution could improve the system performance by providing quick responses to the user’s demands [50].
Another policy conflict detection method was proposed by Jiao et al. [25]. In this work, the authors tried to improve the time of routine, which takes to search for every rule in a policy rule set. To this end, they started by formalizing policy rules, context and policy conflicts. Then, they proceeded with constructing a formal concept lattice based on policies which were clustered into associated formal concepts. The formalization was further used to help propose an algorithm to detect conflicts. The results presented in their work showed that the concept lattice could be as an effective support in policy attribute values and reduction of the number of policy rules [25].
Capra et al. [7] proposed a method, called CARISMA, to use dynamic policy conflict detection and resolution. The authors believed that the conflicts could not be solved statically at the application design time, where they must be resolved in the runtime. Capra et al. [7] defined two types of conflicts: (i) Intra-profile conflict that exists inside the application profile running on a given device. (ii) Inter-profile conflict that exists among the application profiles running on various devices. They used a technique that relies on sealed-bid auction among applications to achieve a fair conflict resolution method [7].
Authority conflict
Masoumzadeh et al. [34] investigated authorization conflicts in various situations. An authorization conflict happens, when two or more polices permit or deny an access simultaneously in a given situation. For instance, a policy allows a resident to switch on the radio while another policy imposes silence. The authors proposed a graph-based approach to enable precedence establishment among authorizations in a conflict situation. In their proposed approach, conflict detection is statically performed, while conflict resolution is done at runtime. Specifically, in the detection phase, a potential conflict graph is statically constructed to simulate an actual conflict situation. Based on the created graph, the approach provides the resolution [34].
Intelligent building-related conflict
Majumdar et al. [33] proposed a method, called a smart meeting scheduling algorithm. The algorithm was designed to automate the meeting scheduling with a specific focus on energy saving while adhering to capacity constraints and time conflicts. The authors used a number of scheduling algorithms from greedy to heuristic methods to reduce the energy use [33].
In another work, Resendes et al. [45] proposed a formal framework based on constrain solving to automatically detect and resolve conflict situations at home and building systems. The authors assumed that when users interact with Home and Building Automation Systems (HBAS), their preferences and intentions happen to be different, causing conflict situations [45].
Rashid et al. [43] proposed a data scheduling scheme, called SHAAL, to manage and process data generated from sensors to support the decision making in smart home and living systems. The authors utilized priority scheduling in SHAAL to facilitate their system in a real setting deployment. Similar to our work, priority scheduling determines which process should be run first, according to its priority given. Therefore, the process with high priority is served prior to low priority ones. If two elements are received with the same priority, then they are served based on their order in the queue [43].
At last, it has to be said that all the aforementioned works mainly focus on the higher layer (i.e. Application layer) which deals with user preferences and intentions. However, it is important to note that this work neglects conflicts and unpredictable behaviors arisen in lower layers (i.e. Sensors layer) that might broadcast or even leave behind undetected and unresolved conflicts, as an outcome of the lower layer’s constraints. Inspired by this gap in the literature, our proposed approach takes into account lower layer issues as part of its conflict detection and resolution process. However, the following sections elaborate the proposed approach in details.
Conceptual framework of system
In this section, it is worth to describe the conceptual framework of typical systems in an intelligent building. Architecture and analysis of this framework were first surveyed by the authors in [5]. They depicted a layered conceptual framework system in which the base layers are more hardware-oriented and the top layers, refer to intelligence services and the actual system logic. Figure 1 shows the conceptual framework of the systems.
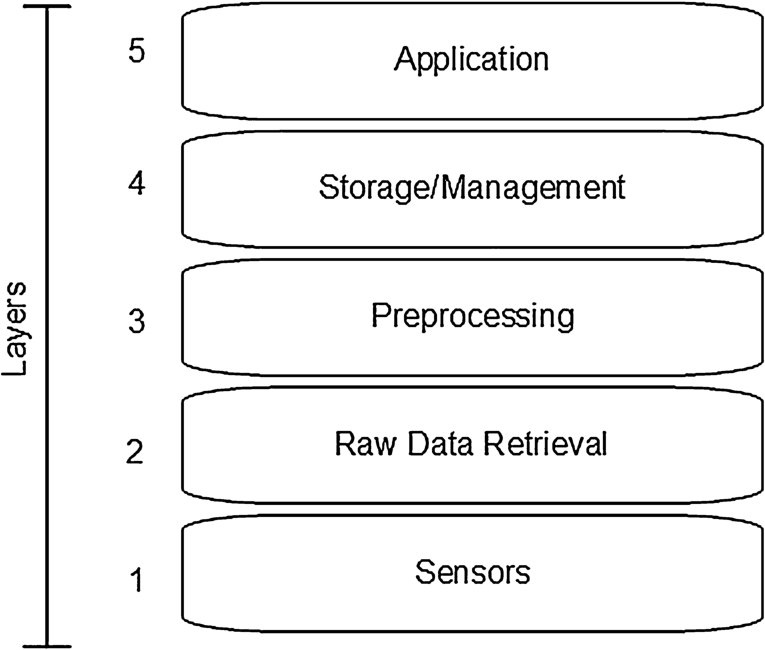
As shown in Fig. 1, the conceptual framework of systems consists of five layers. The first layer contains sensors, which are physical, i.e., hardware sensors that obtain physical data. Virtual sensors that capture context data from other sources. For instance, using mouse movements to determine if someone is at a given place; or logical, which are a combination of physical and virtual sensors with additional information, e.g., information from databases. The raw data retrieval layer deals with obtaining raw data from sensors and offers a unified API to access sensor data.
The pre-processing layer takes sensor raw data to infer the contextual data. At this level, distinct data sources may provide contradicting information about the same context. The context sensing conflicts arise from data quality problems. The storage and management layer enables storing and querying context data. Problems in this layer are limited to informational incoherence, i.e., short periods of time, between two information requests, when the user has outdated context information.
Finally, the application layer is where conflict detection and resolution are realized. The reason is this layer implements the actual system intelligence which is embodied in some applications (e.g. Smart home application) that reasons about the context information and reacts to context change events. As with any layered systems, it should be considered that some conflicts arisen in lower layers may propagate up, or even pass undetected and unresolved as a result of the lower layers’ limitations [45]. As such, this lower layers are the focus of our research. The following section depicts an example of the conflict representation of an intelligent building.
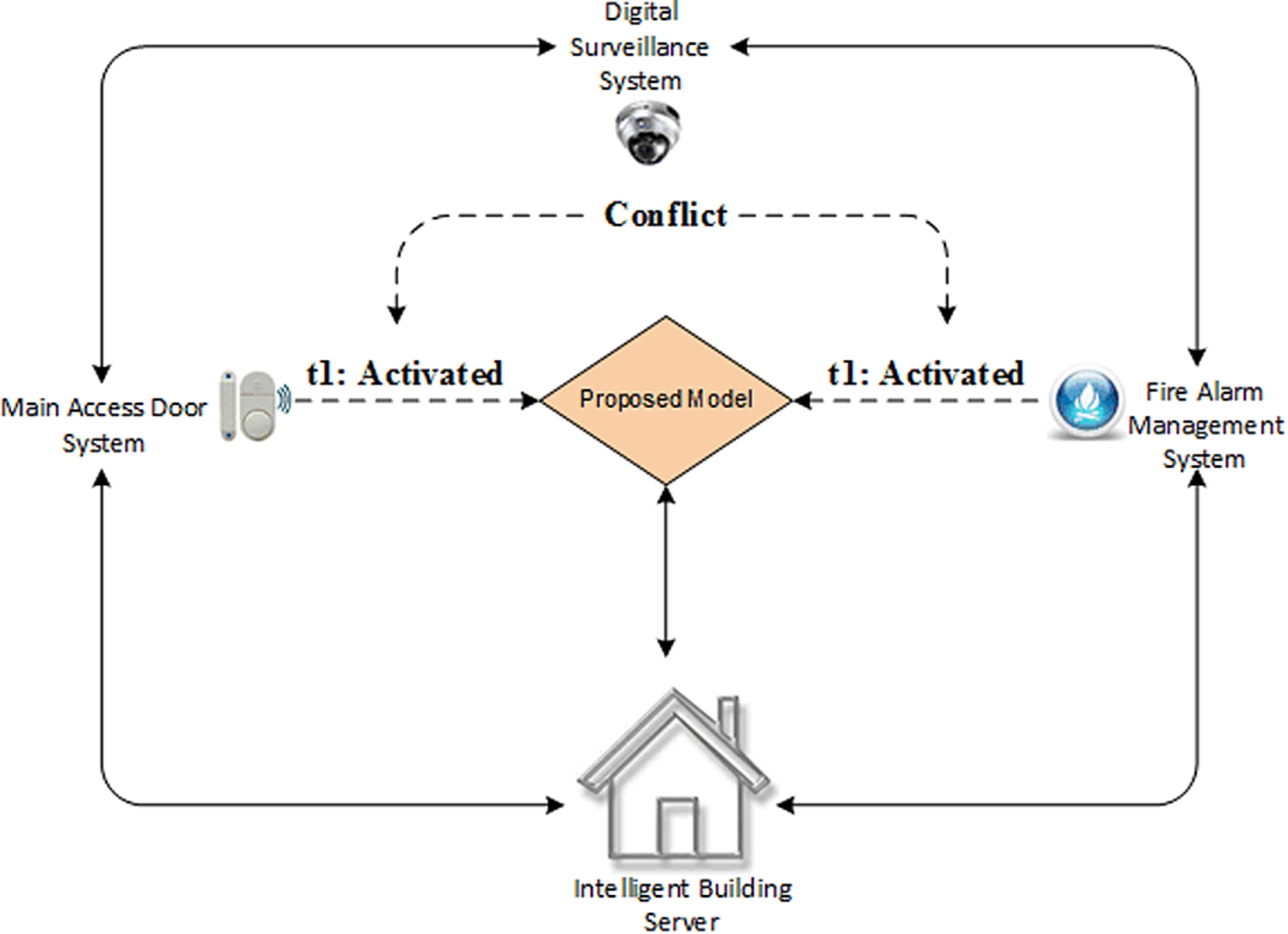
Prior to explaining the system specification, priority level and the proposed approach, this section describes the conflict representation of an intelligent building. When more than one event is activated at the same time, conflict happens. Figure 2 shows an example presentation of conflict in an intelligent building.
Representation of conflict in an intelligent building.

Proposed Model based on weighted priority scheduling.
As it can be seen in Fig. 2, the intelligent building is occupied with three systems such as CCTV, fire alarm, and main access door systems. Dash line in Fig. 2 shows the activated Main access door and fire alarm sensors at the same time which is
The intelligent interoperability framework is implemented using a Building Application Server (BAS), five different subsystems, database module, and machine learning technique. The system implementation diagram of the proposed model is shown in Fig. 3.
The central component of the developed model is the Building Application Server (BAS). BAS provides a means for communication with all the heterogeneous subsystems and also hosts the corresponding drivers and applications of related subsystems. In a simple way, the function of the BAS is to acquire data from the respective subsystems, mapping with the model’s outcome to perform inter-operation of the subsystems. For every event occurrence, its respective subsystem will generate a Simple Object Access Protocol (SOAP) message containing information about the desired event. Once the SOAP message is arrived at the BAS, the SOAP message that is in XML format will be interpreted with the help of an XML parser.
After this, the message is passed to the service level application module. At this stage, the machine learning approach, Naïve Bayesian (NB) classifier, is modeled based on rule repository (the format of the rules is explained in Section 5.2). When the events are received through SOAP protocol, the model will decide which system should be triggered. To make this happen, SOAP protocol needs to be generated to notify other systems that the inter-operation has just occurred. The notification code will go through the SOAP generator by generating SOAP packet based on the outcome event computed by NB classifier model. It is worth mentioning that this kind of scenario clearly requires heterogeneous systems to work and integrate together in an interoperable fashion. This is basically why the conflict resolution model is proposed to help achieve an efficient interoperability and stability among heterogeneous systems in an intelligent building.
Heterogeneous systems and priority level
Table 1 demonstrates the system priority which is assigned based on low priority value. For example, fire alarms and CCTV are allocated with the most noteworthy priority level because of their tendency to wellbeing discriminating concern in an intelligent building’s domain. Gadgets connected with fire alarm and digital surveillance systems are given extraordinary significance in a typical building setting. Furthermore, the heterogeneous systems with the same level of priorities are activated as requested in the queue. As show in Table 1, the priority of the system is determined based on low value priority level and high value weight of the system. For instance, digital surveillance and fire alarms are assigned with the highest priority level due to their nature being safety-critical concern in an intelligent building environment. Devices associated with digital surveillance and fire alarm systems like CCTV cameras are given a great importance in a typical building setting. Moreover, the systems with the same priority level, the one has a high weighted value is triggered. The priority policy of the systems is shown in Fig. 4.
As shown in Fig. 4, the proposed model manages the conflict occurrence among the heterogeneous systems in an intelligent building prior to a making decision. The model is designed based on a weighted priority scheduling. It is often convenient to group events into priority classes and use priority scheduling among the classes. As long as there are runnable events in a high priority class, the priority scheduling algorithm runs each event for one quantum that never bothers about lower-priority classes. In a case, the high priority class is empty, the algorithm then runs the class events of high weighted priority. If the higher classes are empty, the algorithm runs lower class of high weight. As a decision maker, we used a NB classifier to inter-operate among heterogeneous systems. In this paper, we compared NB model with two other machine learning methods, namely multilayer neural network and decision tree C4.5 to emphasize the efficiency of the NB model.
Naïve-Bayesian classifier
As considered in our framework, we applied NB classifier with considering conflict resolution as a decision-maker to attain efficient communication’s response as well as to automate decision making among heterogeneous systems in an intelligent building.
NB classifier is a classification algorithm based on Bayes rule. It can predict probabilities of class membership. For instance, it predicts the probability of a given sample belonging to a particular class. Bayesian classifier is based on Bayes’ theorem and posteriori hypothesis. Besides, NB classifiers have an important assumption that an attribute value of the class is independent of other attribute values. This Naïve assumption is named “class conditional independence” and it is made to reduce the computation involved. This is why that it has been labeled as “Naïve”.
Heterogeneous Systems and Priority
Heterogeneous Systems and Priority

Weighted Priority Scheduling.
In this research, NB classifier is modeled based on the rule repository to dynamically make a decision and achieve a unified integration of heterogeneous devices in an intelligent building environment. The Event–Condition–Action (ECA) format of the rule for system interoperability is presented as follows:
System events:
Conditions of response:
Actions to be performed:
Therefore, the interoperability among systems in an intelligent building is based on the NB classifier decision, which is built through the rules repository. The rules are transformed to the truth table to implement the NB classifier. Table 2 shows an example of the truth table for the CCTV class, which is transformed from rules to the truth table to implement the proposed method. In Table 2, zero and one represent that the device is OFF and ON, respectively. In modeling part, in the off-line stage after the preprocessing step, the truth table is scanned and trained to create the NB model. In our proposed method, we used fivefold cross validation to train the NB classifier.
Truth table of CCTV class [47]
After creating the NB model, in the on-line stage, the events are timely received and scanned. When a new event (s) arrives, the NB model will predict which sub-system should be activated (more detailed of the rules’s format and transforming to truth tables, and modeling of NB classifier with the five systems without considering conflict aspect were explained and presented in [47]).
The Naïve Bayes theorem and the computation probability of
X is considered “evidence”.
Y is some hypothesis, and the data that belongs to a particular class C.
Likewise,
In our intelligent building environment, which consists of five systems, we have five attributes. The first four attributes are features and the last one is a class attribute. As mentioned above, X contains four attributes that are conditionally independent of one another, given class attribute, Y. To emphasize the interoperability (i.e. Communication response time) among heterogeneous systems, two more machine-learning techniques (i.e. Multilayer neural network and decision tree learning) are applied to be compared with NB classifier. These two techniques are modeled in a similar way to NB classifier. The overview and details of these techniques are explained in Section 5.3 and Section 5.4 respectively.
A multilayer perception is a feed forward neural network with one or more hidden layer. In this research, the networks consist of an input layer of source neurons, one hidden layer of computational neurons, and an output layer of computational neurons. The input layer accepts input signals from the intelligent building and redistributes these signals to all neurons in the hidden layer. The output layer accepts output signals from hidden layer and establish the output pattern of entire network [37].
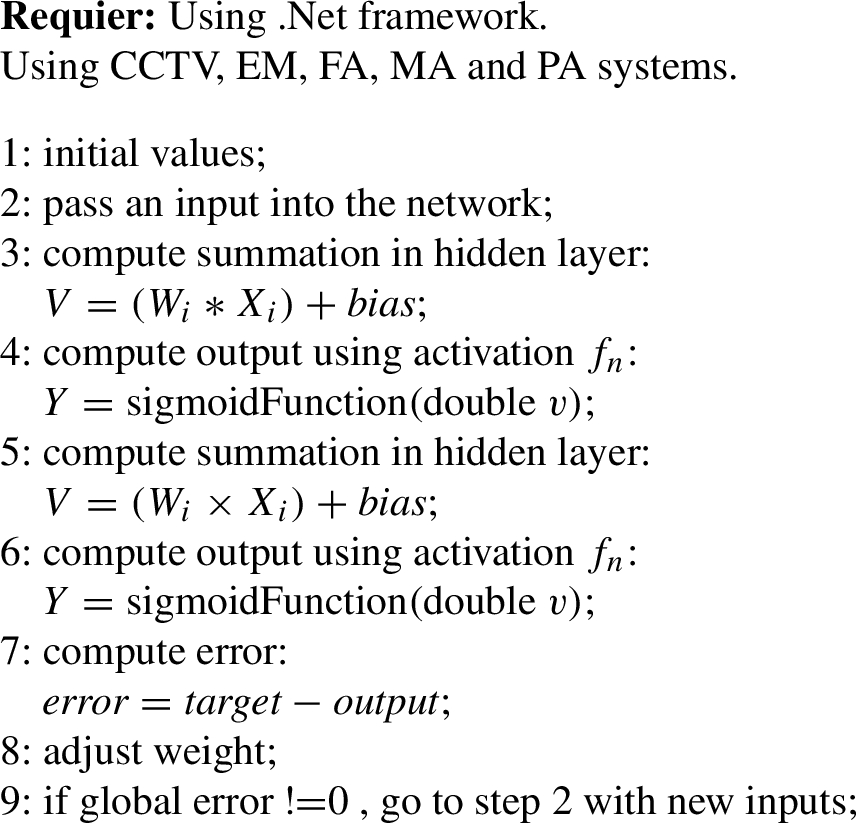
A neuron in hidden layer detects the features, where the weights of the neurons represent the features hidden in input patters. These features are then used by the output layer in determining the output pattern. Figure 5 shows the feed-forward neural network. A feed-forward neural network with one hidden layer and enough neurons in the hidden layers can fit any finite input-output mapping problem. Feed-forward networks consist of a series of layers. The first layer has a connection from the network input. Each subsequent layer has a connection from the previous layer. The final layer produces the network’s output. The multilayer perceptron is presented in Algorithm 1.
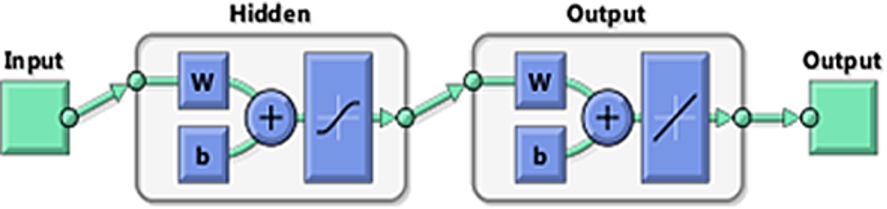
Feed-forward Neural Network.
In our work, multilayer perceptron was implemented in .Net framework to model all five systems including CCTV, EM, FA, MA and PA. In this multilayer perceptron, the input layer consists of four inputs whereas the output layer has only one input.
Multilayer perceptron
As depicted in Algorithm 1, the first step is to initialize weights, bias value, and systems information. Later on, the back propagation neural network is activated by applying inputs and desired outputs. Besides, the actual outputs of the neuron in hidden layer are computed as follows:
Decision tree learning is one of the most widely used and practical methods for inductive inference. It is a method for approximating discrete-valued functions, which is robust to noisy data and is capable of learning disjunctive expressions. This method has been widely adopted in expert systems for captivating knowledge. It is mainly used for inductive methods to the given rate of property of an unidentified object to decide appropriate categorization according to decision tree rules. Decision trees relegate instances by traversing them from root node to a leaf node in a top-bottom manner. From the top root node of the decision tree, the method examines the attribute intended by this node, and then it moves down the tree branch according to the attribute assess in the given set. At the sub-tree level the whole process is reiterated.
In this research, among decision tree techniques (e.g. ID3 and C4.5), C4.5 decision tree was applied. One limitation of ID3 in comparison to C4.5 is that it is overly sensitive to features with large numbers of values. However, C4.5 uses a metric called “information gain”, which is defined by subtracting conditional entropy from the base entropy as shown in Eq. (7):
The C4.5 algorithm has an enhanced method of tree pruning that reduces misclassification errors due to noise or too many details in the training data set. Like ID3, the data are sorted at every node of the tree in order to determine the best splitting attribute. C4.5 uses gain ratio impurity method to evaluate the splitting attribute [42]. Anyanwu and Shiva [3] discussed that decision trees are built in C4.5 by using a set of training data or data sets as in ID3. At each node of the tree, C4.5 chooses one attribute of the data that most effectively splits its set of samples into subsets that are enriched in one class or the other. Its criterion is the normalized information gain (difference in entropy) that results from choosing an attribute for splitting the data. The attribute with the highest normalized information gain is chosen to make the decision. The C4.5 algorithm then recourses on the smaller sub lists [3].
In contrast to ID3, C4.5 has a better performance in terms of model build time as well as search time [20,27]. The pseudo code of C4.5 algorithm is illustrated in Algorithm 2.
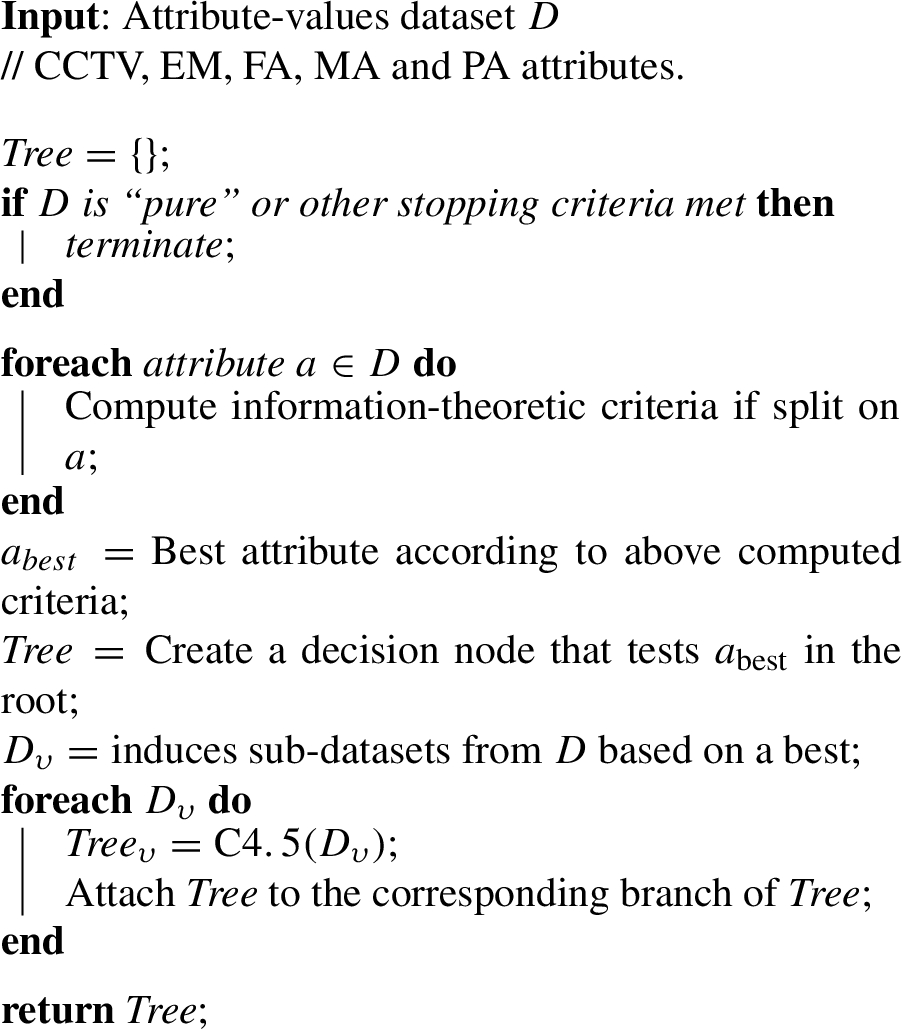
C4.5 algorithm
As shown in Algorithm 2, C4.5 is implemented recursively. At the first stage, the termination criteria are checked to see whether the algorithm satisfies it or not. Later on, if it does not get terminated, then the information theoretic criteria for all attributes (CCTV, EM, FA, MA and PA) are computed according to the information theoretic criteria to choose the best attribute. Subsequently, a decision node based on the best attribute is created and the dataset (truth table) based on the newly created decision node is split. Afterwards, for all sub-dataset that were split, the C4.5 algorithm is called recursively to get a sub-tree. As such, the obtained tree is attached to the decision node to select the best attribute. These stages are repeated for all attributes until the termination criteria are satisfied. Finally, the tree is returned as a model in order to make a decision for new receiving events.
After creating the model, to achieve the efficient communication response and automated decision-making among heterogeneous systems in an intelligent building, conflict situation should be resolved. Section 5.5 presents the conflict resolution approach.
Events generated by heterogeneous systems are synchronized and updated via conflict resolution module in an intelligent building and are screened based on their predefined priority. The Conflict resolution module is implemented based on weighted scheduling mechanism. This weighted-scheduling mechanism is known as Machine Learning Weighted Priority Scheme (MLWPS). The Pseudo code of the MLWPS’s algorithm is shown in Algorithm 3. MLWPS performs priority weighted based on data scheduling for all the events generated in the intelligent building environment. Each system in an intelligent building has a different priority level. Each subsystem has a different weight to be triggered in an intelligent building through the SOAP protocol. For instance, as refer to Table 1, the five systems in an intelligent building are scheduled based on their priorities. The system with high priority is placed in a high class event. Furthermore, the sub-system with the same priority is located and sorted based on its weight. The events are run based on high weighted priority class. When events are received from systems via the SOAP protocol, the model concurrently checks the queue to see whether there exist events of high priority or not. If the received event is of the highest priority, then the model checks its associated weight to select the event with high weight. Otherwise, the event(s) will be queued based on priority and weight.
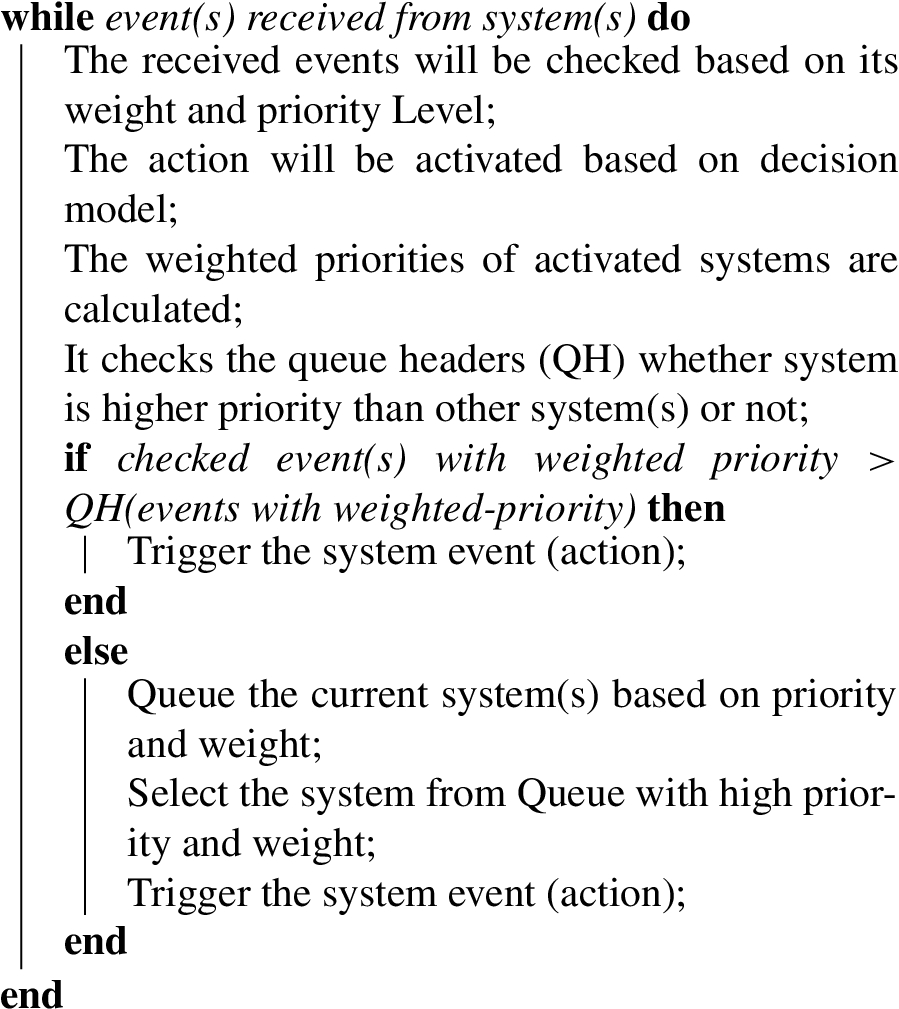
Heterogeneous systems Machine Learning Weighted Priority Scheme (MLWPS)
If the received event(s) is of lower priority compared to the queue event(s), then the received event(s) will be queued based on the priority and weight and consequently the event with high weighted priority from the queue will be pulled to trigger. It is worth mentioning that these generated events are jointly executed, when they match the priority level with event weights as shown in Table 1.
To verify our proposed model and its validation, experimental results and its analyses compared to the benchmark works [41] are presented in Section 6. Moreover, the results of NB classifier without considering conflict resolution has been published in [47].
In this section, the performance metric of classifiers and experimental results are elaborated in details.
Response-time analysis
To evaluate performance of the proposed model, five systems are measured together to express the capability of inter-operation among systems such as audio management system, fire alarm system, energy management system, main access door and digital surveillance systems, which are configured and tested via LAN and dedicated building server. The description of system devices is illustrated in Table 3.
Systems specification of intelligent building
Systems specification of intelligent building
For effective inter-operation of heterogeneous subsystems, a response time is significant and crucial metric for an intelligent building environment. A response time signifies the time to send and receive a message from the subsystem to the framework and back to subsystem [35]. This measurement will indicate the time required for marshalling the arguments and the return values of each subsystem’s message. Response time in an intelligent building environment points towards the maximum time of subsystems control tasks would take by execution without any interrupts or loads. The response time test performed to show the performance of the framework’s control mechanism in order to all systems talk to each other in a federated manner. Moreover, considering conflict resolution, which effects on response time, average waiting time of the events in the queue is calculated:
Process time of triggering event.
♯ of event in
Total ♯ of event in the queue.
average waiting time.
Therefore, W for each ready queue
As mentioned earlier, in the experiment, five systems were selected to evaluate the proposed framework in terms of its ability handling inter-operation among systems. The subject systems included one audio management system (public address), one fire alarm system, one energy management system, one main door sensor system, and one digital surveillance system (CCTV). The systems were configured and tested via LAN in the dedicated building server. The specification of system devices is described in Table 3.
For the performance evaluation, the mechanism of inter-operation is provided by the NB interoperability framework that is benchmarked using SOAP protocol’s response time on message exchange. The response time in an intelligent environment is an essential to make sure smooth functional of services with increasing growth of devices and sensors.
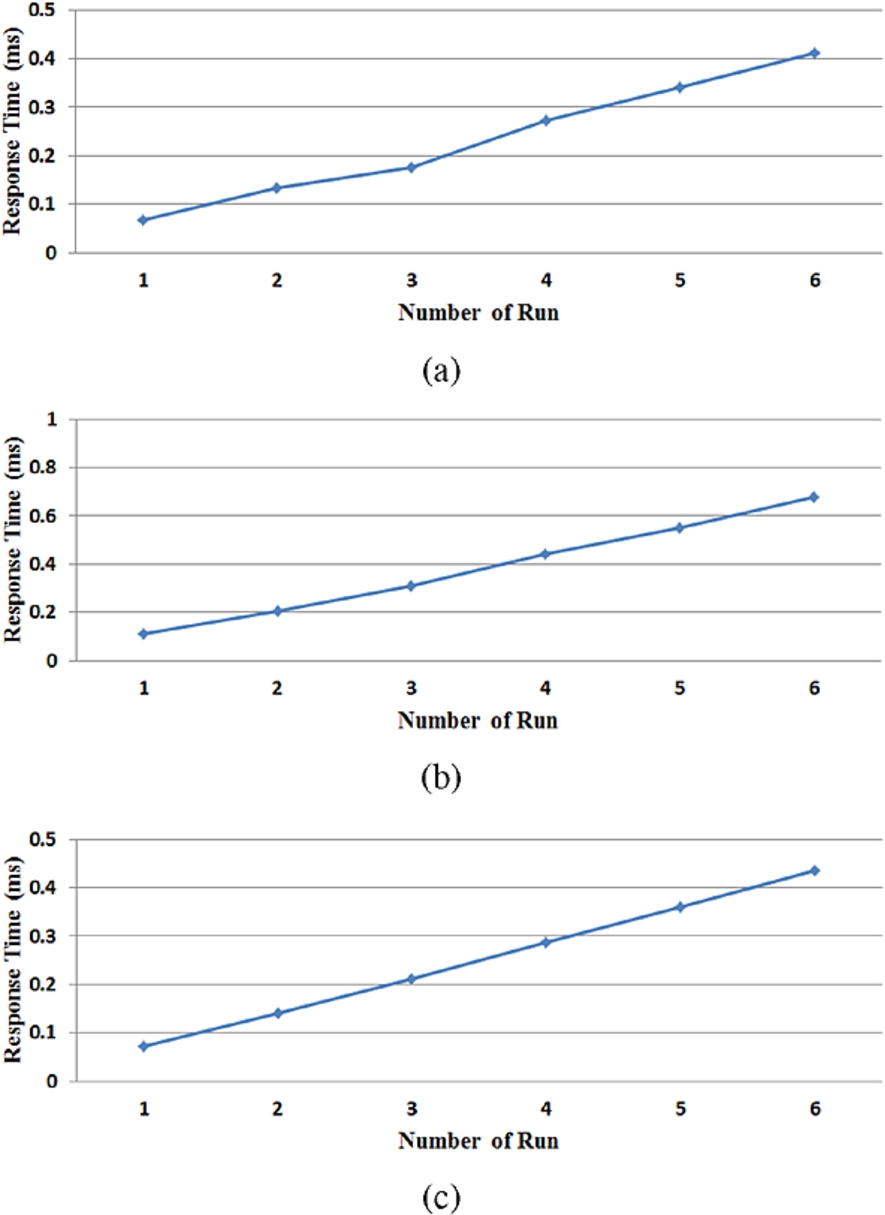
Average response time (ms) of three models with conflict resolution for six runs: (a) NB, (b) MLNN, (c) C4.5.

Average waiting time (ms) of three models for six runs: (a) NB, (b) MLNN, (c) C4.5.
In the experiment, we evaluated the approaches with considering conflict resolution. Figure 6 shows the response time of models with conflict run on five systems. The results were experimented based on three models, i.e. Naïve Bayesian classifier, multilayer neural network, and C4.5 decision tree for six runs. On the first run, the number of received events was 10. Consequently, the number of events increased to 20 for the next run. For the remaining four runs, the number of events increased by 10 for each consequent run. It is important to note that the Fig. 6 shows that by increasing the number of events the response time curve will climb linearly. The detailed results of the response time with conflict resolution between heterogeneous systems in intelligent building are given in Table 4.
Average time (ms) of approaches for five systems
In this research, as shown in Table 4, NB classifier has a comparable or better processing time (
Figure 7 and Fig. 8 show, respectively the average waiting time, and the response time of each system with conflict resolution for three machine learning models, i.e. NB, MLNN, and C4.5.
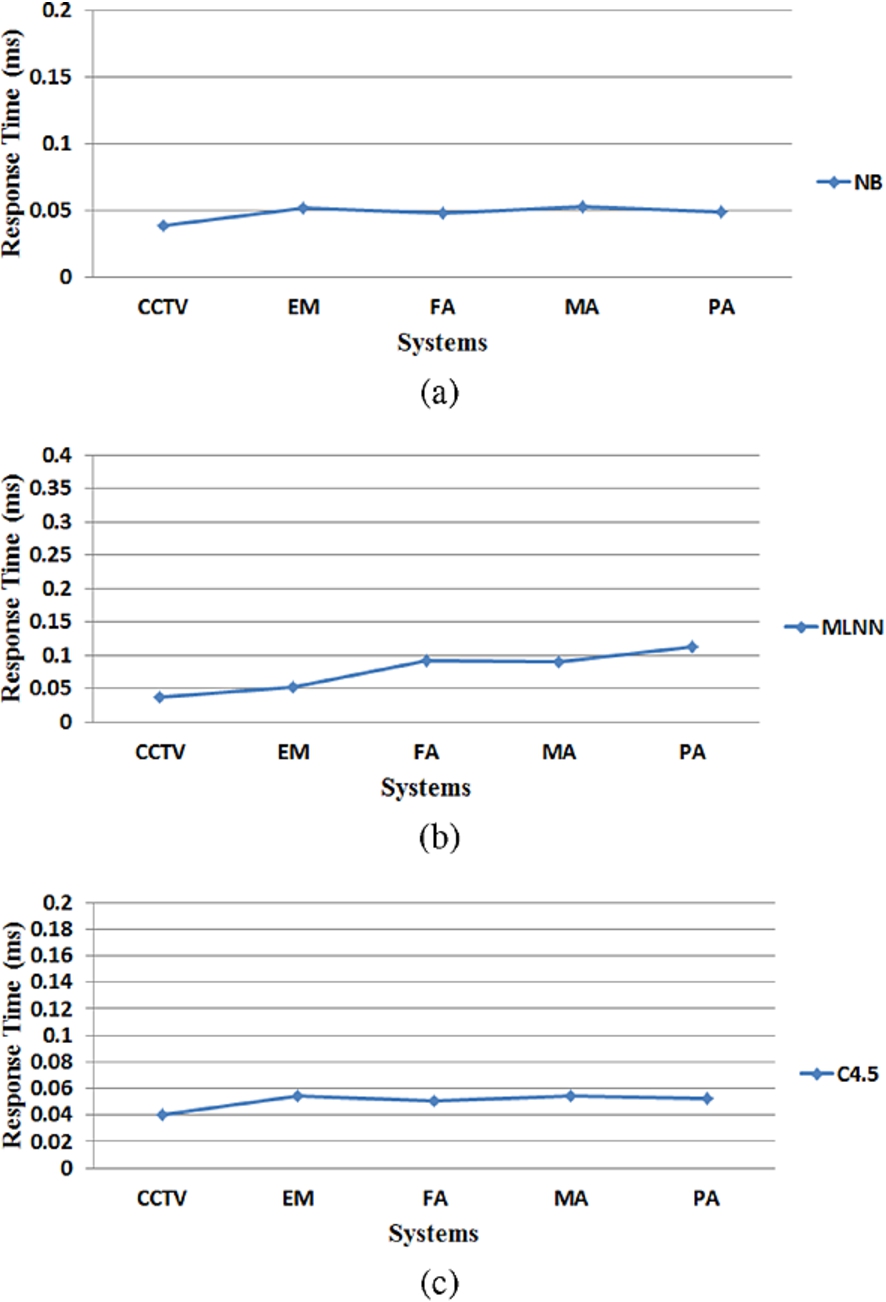
Average response time (ms) of three models with conflict resolution for each five Systems: (a) NB, (b) MLNN, (c) C4.5.
In contrast to the benchmark work (i.e. Event–Condition–Action (ECA) based model in [41]), our proposed model shows to have a better performance in terms of resolving conflict among heterogeneous systems in an intelligent building. Figure 9 depicts the results in a support of this out-performance.
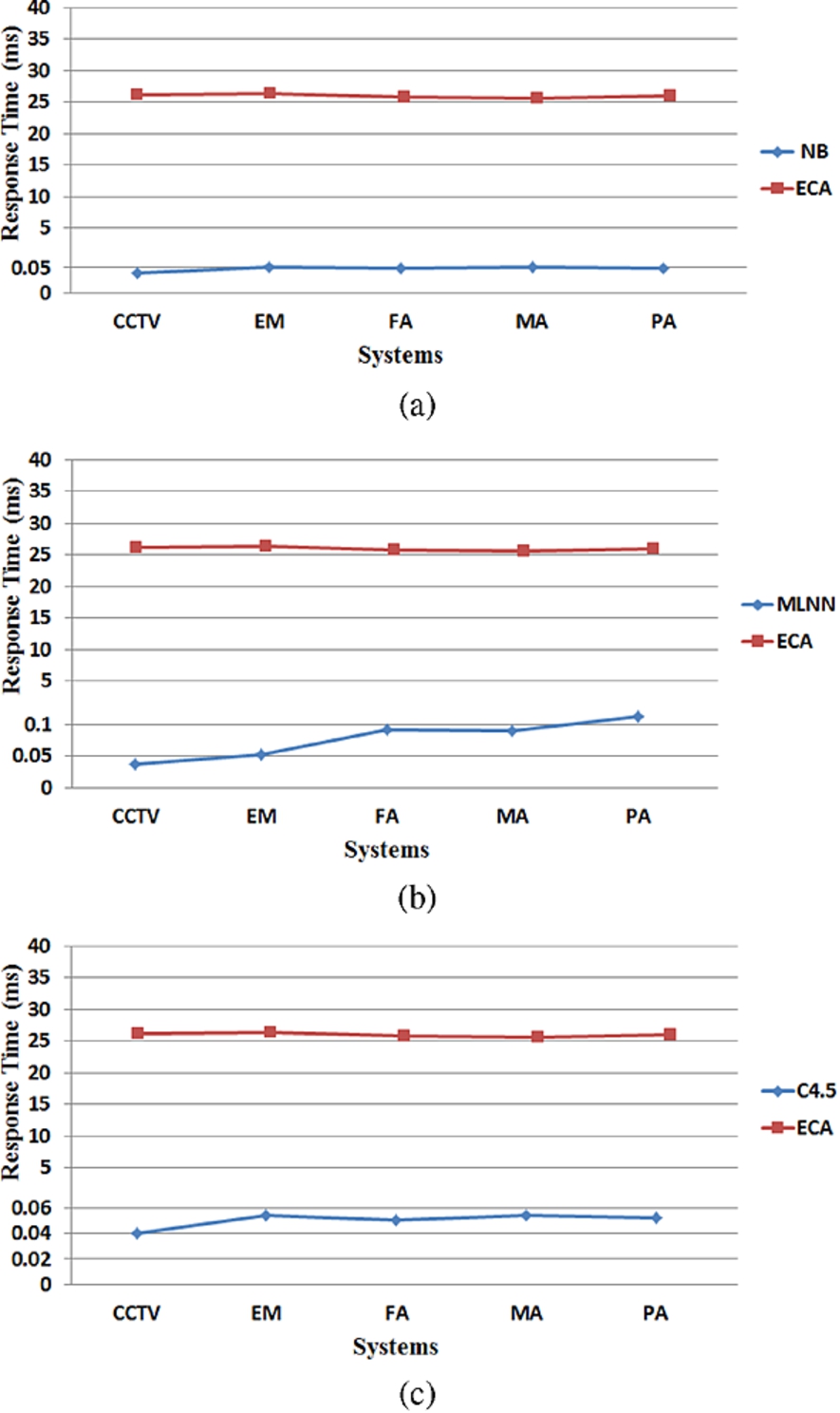
Average response time (ms) of proposed models in comparison with ECA-Based model for the five Systems: (a) NB, (b) MLNN, (c) C4.5.
As shown in Fig. 9, the response time of five heterogeneous systems in an intelligent building is given based on their respective system types. The approximate response time value of five heterogeneous systems of Event–Condition–Action (ECA) based model and the proposed model with conflict resolution is presented in Table 5.
Average response time (ms) of ECA-based and proposed models with conflict resolution
In comparison with the Event–Condition–Action based model (i.e. Work done in [41]), our approach improved the response time among the heterogeneous systems in an intelligent building even with conflict resolution. Although our approach declined the response time due to the conflict resolution process in comparison with the NB model that does not consider conflict resolution (i.e. [47]), we attained the efficient communication response as well as automated decision-making among heterogeneous systems in an intelligent building environment. In the ECA-based model and other existing rule-based models, when an event comes through the XML SOAP protocol, the model must consider and go through the entire rules to make a decision. This in turn could be a time-consuming and error-prone process. On the other hand, sending events to the central rule base makes it necessary to establish a connection to the database in the server as well as rule base center. However, such a connection cannot be guaranteed over a longer period of time. The central event detector could respond to these events with delay [21]. In contrast to the rule-based model, the proposed approach makes a decision based on a model that was trained once from the rules repository. This is to say that, the decision making support of the proposed approach in terms of response time is much faster than the previous work (compared to the ECA-based model in [8]). In addition, the proposed approach provides conflict resolution to support decision making which is meant to be more reliable and efficient among heterogeneous systems in an intelligent building. It is also important to note that, the results of the experiment showed that the systems with conflict resolution would still work efficiently.
Automating interoperability with resolving conflicts to achieve the efficient communication response among heterogeneous systems in an intelligent building is an important field of contemporary research, which was investigated in this work. The proposed model noticeably demonstrated that conflict detection and resolution could support the decision-making and facilitate the interoperability among heterogeneous systems. Moreover, the proposed model detected the conflicts dynamically without any external human intervention, which is unique in this sense.
The conflict resolution provided by the proposed model is performed based on weighted priority scheduling as such when two events with the same priority are arrived simultaneously, the events with higher priority and weights will get triggered. In the absence of such conflict resolution technique, it is obvious that the existing intelligent building’s models might face with system faults or unpredictable situations. As such, a clear contribution of this work would be of that the conflict resolution could make the intelligent building’s models more reliable and sustainable.
Conclusion
Development of an efficient intelligent building is essential in the today’s world. This paper presented a new model that automates interoperability with resolving conflicts to attain efficient communication response among heterogeneous systems. In this proposed model, heterogeneous systems are managed via the SOAP protocol and web services. Each system and sub-systems have different priorities and weight values. Our model was built to detect and resolve the conflicts among heterogeneous systems with the weighted priority scheduling to support the decision-making in an intelligent building, which is currently scarce.
For the future work, although the conflict occurrence among heterogeneous systems was solved using weighted-priority scheduling algorithm, it is not widely applicable to all kinds of environments. In our model, the weighted and priority level of systems was predefined and assigned in off-line stage (creation part), which makes it quite hard to be applied in adaptive environments. Thus, on-line enabled weighted priority value is needed to be further designed for such environments. Another direction is pertaining to the security of message exchange that is not implemented in the intelligent interoperability framework yet. With regard to intelligent building environments, there is a great concern about security for message exchange among systems. Hence, future initiative should address on deploying XML-based security schemes for web services.
Footnotes
Acknowledgement
This work was supported by Exploratory Research Grant Schema (ERGS), Malaysia with vote number: 5527175.