
Abstract
Cities are in a period of rapid urban development and high-rise buildings are constantly emerging. The characteristics of a fire in a high-rise building are the rapid spread of the fire, the difficulty of fighting the fire, and the difficulty of evacuation. Intelligent fire evacuation requires dynamic planning of paths in fire field, it is necessary to automatically adjust the evacuation route in the building according to the real-time information of the fire. In this paper, an improved bidirectional ant colony algorithm is proposed to optimize fire evacuation routes. In order to improve the global search capability of the algorithm, a bidirectional search strategy with the A* algorithm is designed for the ant colony algorithm, the blindness of the algorithm is reduced in the initial search, the pheromone update strategy is improved, and the convergence speed of the algorithm is increased. The fire scene information is combined with the steering penalty coefficient to improve the algorithm’s evaporation coefficient, heuristic function and transition probability, avoid the risk of falling into the local optimum, improve the search efficiency of the algorithm and the smoothness of the path, and effectively avoid areas affected by the fire. The effectiveness of the algorithm is verified by simulation.
Keywords
Introduction
With the development of economy and the continuous progress of technology, large-scale comprehensive buildings are increasing. These buildings generally have the characteristics of high-rise, complex and dense [39]. In the event of a fire and other emergencies, how to evacuate people in buildings more quickly, safely and effectively has become a new topic for disaster prevention and mitigation [20]. Although traditional fire-fighting evacuation maps have been placed in the building, the real-time situation of the fire scene cannot be known in time due to the fixed evacuation route [9]. In the event of a fire, it is possible that people may be misled to evacuate in the direction of serious disaster due to wrong instructions, this is not allowed. Therefore, the evacuation route can be dynamically adjusted according to the designed intelligent evacuation algorithm for the real-time information of the fire. Such an intelligent fire evacuation map has attracted more and more people’s attention [37]. However, how to efficiently and accurately calculate the optimal evacuation path and guide people to evacuate quickly and safely, which involves the problem of fire evacuation path planning [18,19].
Intelligent technology has a wide range of applications for emergency escape on intelligent building (IB), and many scholars have conducted research. The rapid growth of the world’s population increases the demand for more efficient management of ambient and environment. To address the demand, modern technologies are applied to enhance the surrounding to become more intelligent and efficient such as the development of intelligent building (IB) via the enhancement of the building with interconnected sensors, advanced event detection mechanism and automated mitigations action execution selected anomalous events. Recently, the use of complex event processing (CEP) approach has gained traction in implementation of IB. An inclusive review of the concept of IB was provided [22], such as its facilities, technologies, communication protocols, merit, and demerit in different applications. Each day more and more new technological devices appear in our world. We want to have everything connected so that we can monitor different aspects inside a city such as the traffic, or inside a building such the position of the people. Even nearly everyone now owns a mobile phone that carries with himself all the time and that enables them to receive information of that type in real time. The creation of such tool was proposed as an AmI simulator that integrates both a network and a social simulator [23]. A Building Information Model (BIM) was presented [13], which describes the topology, geometry, and semantics of buildings; user preferences; and status of sensors deployed in the building. The aim is to propose an approach for developing a context-aware indoor navigation system, which assists blind and visually impaired people in unfamiliar large public buildings with complex horizontal and vertical connectivity. The proposed building data model aims to overcome the drawbacks of existing BIM-based Indoor Navigation Systems (INS). The innovation aspects of the proposed data model can be summarized as follows: 1) Abstract description of the hierarchy of building elements; 2) BIM is focused on indoor navigation. It allows one to extract information about the topology of a specified part of the building, which is used by an algorithm for coarse-to-fine path finding; 3) Provides rich semantic information on all building elements, objects and users located in the building; and 4) Provides all necessary information for obstacle (fixed and movable) avoidance. Rapidly changing detrimental safety conditions on an evacuation route might cause casualties and provoke panic. This is why we need to take into account these conditions for real-time route optimization. The objective is to facilitate efficient people evacuation through dynamic optimization of evacuation routes based on the safety conditions on the route and stress-related evacuees’ responses to the same. A multi-agent based evacuation route optimization architecture was proposed for smart space networks that considers the influence of stress on human reactions to the recommended routes [22]. This architecture is meant as a real-time decision support in route selection that recommends routes to evacuees, possibly through smart phone or smart building displays.
A data-driven approach is proposed based on convolutional neural network (CNN) [25], which is suitable for various construction environments and can recognize real-time fires on site. This research built a fire-recognition model and developed a real-time construction fire detection (RCFD) system. An approach named automated determination of exit sign direction (ADESD) is proposed to automatically determine the directions of building exit signs [8]. ADESD generates sign directions for a building by four steps: generate an indoor navigation graph network of the building; integrate exit signs into the navigation network; calculate recommended directions of exit signs based on their shortest accessible evacuation routes, and calculate negated directions of exit signs corresponding to hazardous areas. Novel algorithms are proposed in ADESD to generate spatial relationship between exit signs and exits automatically and determine exit sign directions accurately. An optimum and intelligent system design was developed using the feedback of real-time fire characteristics based on precise control logic using computational fluid dynamics [12]. The new system can make an intelligent adjustment to adapt the real-time fire and to obtain the best smoke exhaust condition by coupling the smoke control system and a physical boundary. An analytical model of the evacuation scenario on accidental fire was presented by using stochastic petri nets [1]. The evacuation model takes into account human behavior parameters such as panic among occupants, and realistic situations namely stampede in the stairwell, and distance of each occupant to the floor exits.
Experts have done a lot of research work in path planning. In order to consider the dynamics of the occurrence and development of underground space fires, combined with the changes of various human physiological tolerance indicators such as temperature and CO volume fraction over time, an evacuation path dynamic planning method of underground space escape that can consider the evolution of fire scenes is established based on the A* algorithm [11]. By establishing a time history database of key indicators of the fire scene, and the escapable area is identified according to the human tolerance index limit, and then dynamic reconstruction of the fire escape scene is performed at different times, the A* algorithm is used to identify the escape and evacuation path of the reconstructed scene, and the dynamic planning of the fire evacuation path is realized in the underground space. A digital twin-driven dynamic guidance method is proposed for fire evacuation [17], it is used to solve the problem that the current building safety evacuation expression mode is mainly two-dimensional, and the evacuation path planning cannot be carried out dynamically in real time according to the development situation of the fire, and the personnel cannot be considered. BIM (building information modeling) and the Internet of Things are used in this method to build a digital twin model for evacuation, and integrates the space, indoor environment, and personnel location information in the model, and Dijkstra’s algorithm is used for evacuation path planning. In order to optimize the dynamic evacuation path of complex building fire with the shortest time, the lowest risk level and the maximum evacuation capacity, the dynamic evacuation network data model is combined with the swarm intelligence method to construct a path optimization model [32]. The dynamic evacuation path planning with limited node and path capacity is realized based on the improved adaptive fruit fly algorithm. Aiming at the problems of the current fire evacuation system in the harsh environment of fire and smoke, such as identification difficulties, single guidance scheme, high maintenance cost, insufficient intelligence, etc., a laser intelligent fire evacuation system is designed based on ant colony algorithm [7]. This system is composed of information collection modules, central processing modules and evacuation guidance modules, it is used to intelligently monitor and process the fire scene in real time. When a fire occurs, sensors dynamically collect fire scene information, the location of the fire is displayed with a display, and the ant colony algorithm is used to calculate the optimal evacuation path through the processor Finally, the evacuation guidance module projects the evacuation path on the ground in the form of a laser relay to guide the dynamic evacuation of personnel. Current fire evacuation studies often only study the evacuation process of people in the room to the exit of the room alone, or evacuate people in the corridor alone. Few people study the fire evacuation of the room and the corridor as a whole. The overall evacuation of the lower room and the corridor is even rarer. In actual fires, people do not evacuate to the room exit to reach a safe state, and often need to evacuate from the room to the safety exit at the end of the corridor. At this time, the flow of people in the corridor will be affected. The exit choice of the people in the room and the severity of the congestion at the exit have a great impact, so it is necessary to consider the room and the corridor as a whole for evacuation research. The cellular automata model is improved, and the corridor is introduced. The influence of direction on the path selection of people in the room, the evacuation model including room and corridor is established through Python [29], and different corridor widths, the number of rooms and the density of people in the room are simulated separately to obtain some evacuation characteristics of the overall room and corridor under fire. The main reason for the characteristics is that the direction of the corridor flow changes the attractiveness of the different exits of the room to the people in the room. An extended Floor-Field (FF) model is proposed to study the pedestrian evacuation dynamics with the influence of the fire and the smoke spreading [38]. The spreading of smoke is from top to bottom, which leaves less and less room for the movement of pedestrians. And thus, the movement behavior of pedestrians is divided into three stages: normal walk, bent-over walk, and crawl. In the new model, the influence of the fire and the smoke on the movement of pedestrians is modeled by the fire floor field and the smoke floor field respectively. Numerical simulations are carried out to study the evacuation dynamics under fire and smoke. The influences of personnel density, fire location, exit width, fire spreading rate, and smoke spreading rate, on the evacuation efficiency are analyzed in detail. These include traditional algorithms such as Dijkstra algorithm,
Ant Colony algorithm (ACO for short) is a heuristic optimization algorithm, which has the characteristics of good robustness, distributed computing and strong adaptability, and it is widely used in different path planning fields. The initial pheromone distribution of the ant colony algorithm is adjusted to improve the search efficiency in the initial stage of the algorithm [31], but the overall operation efficiency of the algorithm is relatively low. The heuristic function of the ant colony algorithm and the weight coefficient of the ants in the moving process are improved [21], although the search efficiency of the algorithm is improved to a certain extent and the path length is reduced, the problem of unsmooth path still exists. The optimal path is used as the guiding path after each iteration of the ant colony algorithm [35], and the path guiding search strategy is used to determine the multi-step path, which improves the global search ability and efficiency. At the same time, the smoothness of the path is improved to a certain extent, but it falls into the local optimum, the problem has not been solved well. Demand and time span factors are added to the ant colony algorithm heuristic factor [26], the target weight is added to the pheromone update strategy, the solution speed is improved and the occurrence of local optima is reduced, but the global search capability needs to be further improved. The pheromone update method and heuristic function of the ant colony algorithm and the algorithm path selection strategy are improved [28], and they are applied to evacuation path planning. The improved algorithm improves the convergence speed and reduces the path length, but the actual evacuation site factors are less considered.
In this paper,
Materials and methods
Problem analysis and environmental modeling
Problem analysis
Construction of multi-floor buildings have increased multifold in the urban areas due to scarcity of space for the growing population. There is a need for safe evacuation of people in such multi floor buildings during emergency situations such as fire occurrence. The working principle of the intelligent fire-fighting evacuation map is that when a fire or other emergency occurs in a building, the intelligent fire-fighting evacuation map is based on the fire location, area temperature, toxic smoke, density of people and other information which are detected by the fire detection device in the building. The optimal evacuation path of the location is dynamically planned and displayed, so as to instruct the evacuees at the location to evacuate quickly and safely, the efficiency of evacuation is improved and the loss of personnel and property is reduced [3,4]. Since the structure information of the building is known, the path planning of the intelligent fire evacuation map belongs to the global path planning, and the path planning generally has the following characteristics:
The floor map environment and relevant real-time fire information are known.
When a fire occurs, only the impact of fire location, number of path turns, toxic smoke, density of people, and area temperature are considered on evacuees. Wherein, the impact of toxic smoke, density of people, and area temperature on evacuees is divided into three levels, as shown in Table 1.
The influence of toxic smoke, density of people, and area temperature on evacuation
The influence of toxic smoke, density of people, and area temperature on evacuation
Note: Reference [3]
The optimal evacuation route is not the shortest evacuation route. The impact of fire on the evacuation route should be considered. The shortest evacuation route should be ensured under the premise of personnel safety.
The commonly used methods of environmental modeling are grid method, topology method and geometric method. The grid method is used to model the floor environment in this paper. The environment of each floor in the building is abstracted and discretized into several grids. According to the passability, it is divided into free grid or obstacle grid. The white area is the feasible area, and the black area is the obstacle area. When obstacles cannot fill a grid, it is calculated as a grid, and the start and end positions have been marked. 35 × 35 grid map is used to build a two-dimensional floor intelligent fire evacuation map, as shown in Fig. 1.
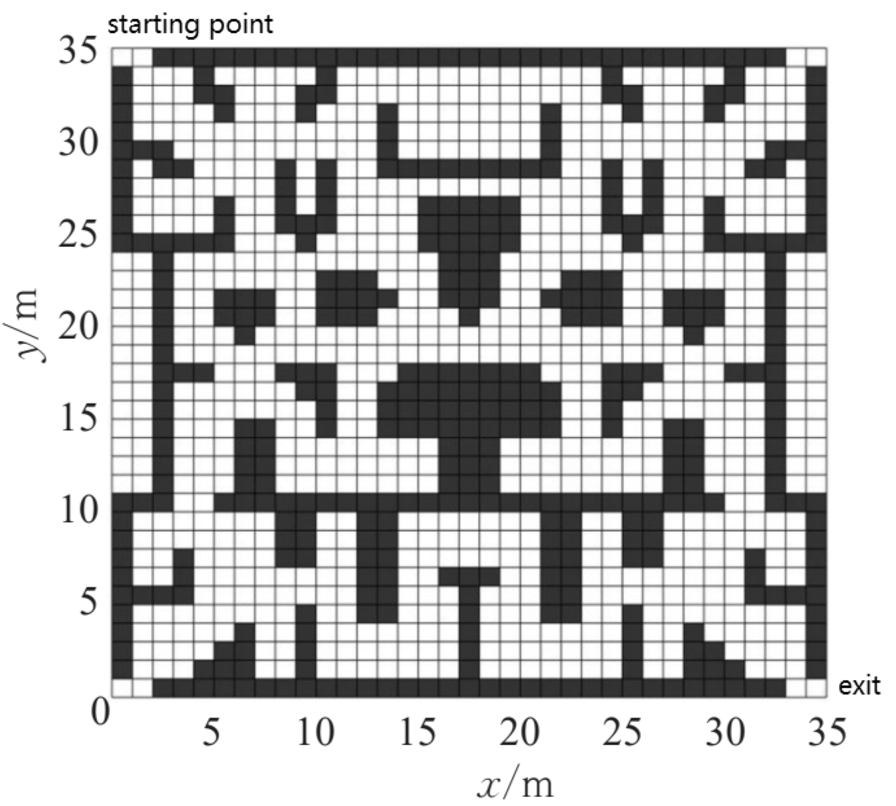
Two-dimensional floor intelligent fire evacuation map.
In general, 3D grid environment modeling needs to construct a 3D cube space first, and then the entire space area is equally divided to facilitate subsequent 3D path planning. Due to the structural characteristics of the floor evacuation map, the escaping crowd is not randomly distributed in the entire three-dimensional space, but they are randomly distributed in the same plane of each floor, so there is no need to divide the entire space equally. In the O-XYZ three-dimensional coordinate system, each floor is regarded as a two-dimensional grid map, and then two-dimensional grid maps of different heights are combined. This simplifies the division of the three-dimensional grid space and the extraction of feature points without affecting the path planning. The building is set to have a total of three floors with four exits on each floor, and different floors are adjusted to different colors. In order to facilitate the observation and setting, the two-dimensional floor map is established as the third floor of the building, and the established three-dimensional floor intelligent fire evacuation map is shown in Fig. 2. “ ” in Fig. 2 is exit in English.
” in Fig. 2 is exit in English.
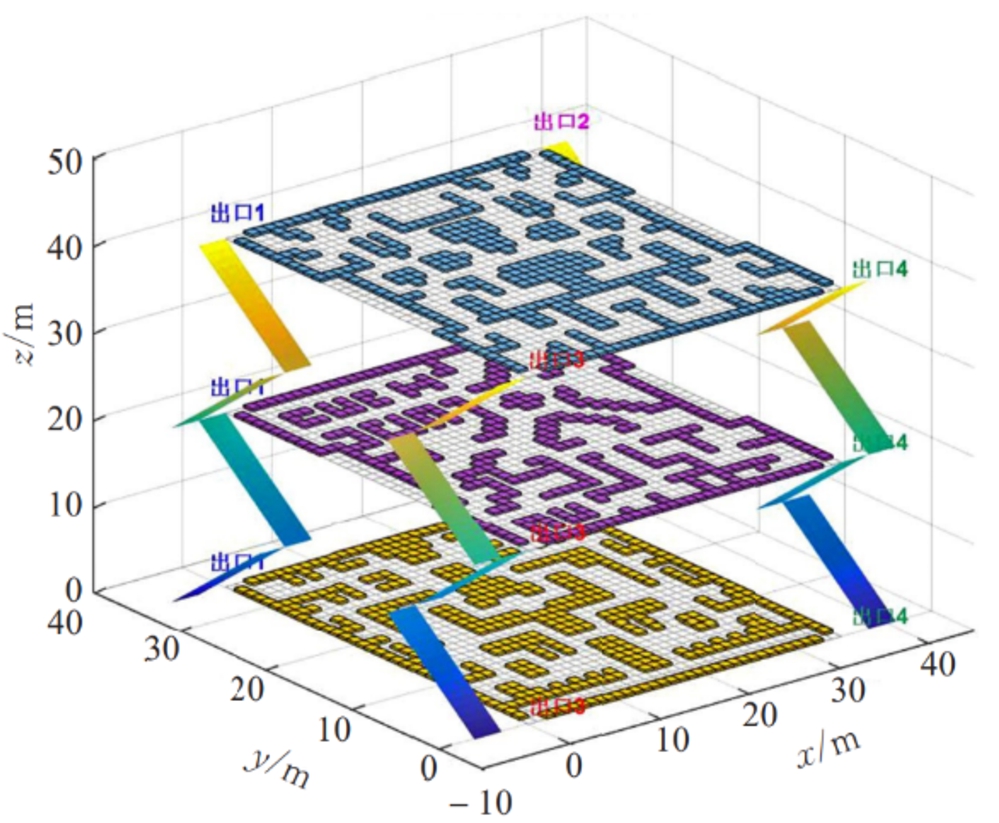
Three-dimensional floor intelligent fire evacuation map.
The basic principle of ant colony algorithm
The ant colony algorithm was proposed by Dorigo et al. in 1997. It simulates the collective foraging of ants, and it is a heuristic optimization algorithm [6]. When ants in nature forage for food, they leave a special chemical pheromone on their path. The concentration of pheromone on the path will continue to volatilize and decrease. At the beginning of foraging, the ant colony chooses the route evenly, and the subsequent ants will perceive the pheromone on the path and judge the concentration of the pheromone to determine the direction of their movement. The more pheromone on the path, the higher the probability of ants choosing this path, and the number of ants on the path increases [10]. As time goes by, the number of ants on the longer path decreases, and the number of ants on the shorter path keeps increasing. Eventually the entire ant colony will find an optimal path. Although the ant colony algorithm has the characteristics of good robustness, distributed computing and strong adaptability, it also has the problems of long running time, slow convergence speed and prone to local optimization [33,34].
Basic principle of
algorithm
The
In formula (1), f(n) is the global cost value of the current node n, g(n) is the real cost from the start node to the n node, and h(n) is the estimated cost value from node n to the target point. The basic idea of the algorithm is to calculate the cost value f(n) of each node in the eight adjacent squares from the starting point, and it is set as an obstacle if a grid point is occupied in the eight adjacent squares. If it is not, the node cost is compared, the node with the smallest cost value is selected as the next node position, and it is stored in the parent node at the same time. Continue to repeat the above cycle until the end of the search is reached. Afterwards, the path is traced backward from the end point to the starting point, and the least cost path is obtained [2].
Improved bidirectional ant colony algorithm
In order to solve the long running time, slow convergence speed and local optimization problems of the traditional ant colony algorithm when dealing with the path planning of the intelligent fire evacuation map, the bidirectional ant colony search strategy is first added [16,30], and then the initial pheromone distribution and pheromone update strategy are adjusted for the ant colony algorithm. At the same time, the heuristic function, volatilization coefficient, and state transition probability of the ant colony algorithm are improved based on the real-time information of fire [15,27,36].
Bidirectional ant colony search strategy
The original ant colony algorithm only considers a single-direction ant colony search strategy, that is, searching from the starting point to the target point. At the beginning of the search, because the starting position is the same, there will be many repeated paths. As a result, within a period of time after the start of the search, the pheromone updates were concentrated in the surrounding area of the starting point, and the pheromone updates at other locations were not much, and ants did not search in many places on the map. To get the optimal path, multiple rounds of ants need to be sent, which takes a long time, and the problem of local optimization is prone to occur due to insufficient search range. Therefore, a bidirectional ant colony search strategy is used in this paper, that is, ants are divided into two groups with equal numbers of odd and even numbers according to their serial numbers. At the beginning of the path finding, when the ant’s serial number is odd, it searches from the starting point to the end point, and when the serial number is even, it searches from the end point to the starting point. This reduces the number of ants searching from the same starting point. At the same time, because the ants alternately search from two directions when searching the path, the pheromone is updated from the starting point and the ending point at the same time, which expands the search space and improves the global search ability of the algorithm.
Initial pheromone adjustment
When the ant colony algorithm pheromone is initialized, the pheromone content on each path is the same. In the initial stage of the search path, the ant’s traveling direction is chaotic, and it is easy to enter the dead zone, which makes it difficult for subsequent ants to find the optimal path. Therefore, the
In formula (2), C is a constant, and
Adjusted initial pheromone distribution.
The pheromone update rule of the traditional ant colony algorithm is to record all the routes of the ants to the destination after one round of iteration is completed, and to strengthen the pheromone on the path they have traveled. However, there is no optimal and worst path for such an update strategy. The pheromone left by the ants with a long path will have an impact on the ants in the next round of iterations, resulting in slower algorithm convergence. By rewarding and punishing the pheromone content left by the ants on the shortest and longest paths, the convergence speed of the algorithm is improved in this paper, the update strategy is in Eq. (3).
In formula (3), ρ is the pheromone volatilization coefficient to be calculated according to formula (5); in formula (4), L worst is the longest path in history, L
best
is the shortest path in history, and
Volatility coefficient improvement
The volatilization coefficient ρ in the ant colony algorithm has a very important impact on the performance of the algorithm. A good volatilization coefficient can improve the search efficiency of the ant colony algorithm and the global search ability, the risk of falling into the local optimum is reduced. If the volatilization coefficient is too small, the pheromone guides the ants too much, and it is easy to cause the local optimum and to reduce the convergence speed of the ant colony algorithm. On the contrary, it will weaken the guiding effect of pheromone, and the probability of re-selecting the searched path will greatly increase, which will reduce the global search ability of the ant colony algorithm. Therefore, the volatilization coefficient of the ant colony algorithm is improved, it is adaptively adjusted according to the fire-affected area and the number of iterations. A larger volatilization coefficient is set at the beginning of the algorithm. As the algorithm is iterated, the volatilization coefficient gradually decreases, and the pheromone on the path gradually increases the guiding effect of the ants. The reduction rate of the volatilization coefficient is affected by the number of fire areas. The specific update strategy is the formula (5):
In formula (5),
In formula (6), ρ is the initial value of the pheromone volatilization coefficient, O is the number of grids which are occupied by the affected area in the fire, and G is the number of grids in the entire floor map. From formula (6), it can be seen that as the fire-affected area continues to increase, the initial value of the volatilization coefficient continues to decrease, and the initial global search capability of the algorithm continues to improve, making it easier to find the optimal path.
Heuristic function improvement
The heuristic function
In formula (7),
Transition probability improvement
In the event of a fire, in addition to considering the safe distance between the escape route and the fire-affected area, the smoothness of the evacuation path should also be considered. The escape path is too tortuous, which will easily cause the escaped personnel to lose their way in a tense situation and reduce the escape efficiency. Therefore, in this paper, the transition probability is adjusted according to the number of path turns, and the transition probability is calculated in Eq. (9):
In formula (9), θ is the steering angle of travel, that is, the angle between the travel direction from the previous node
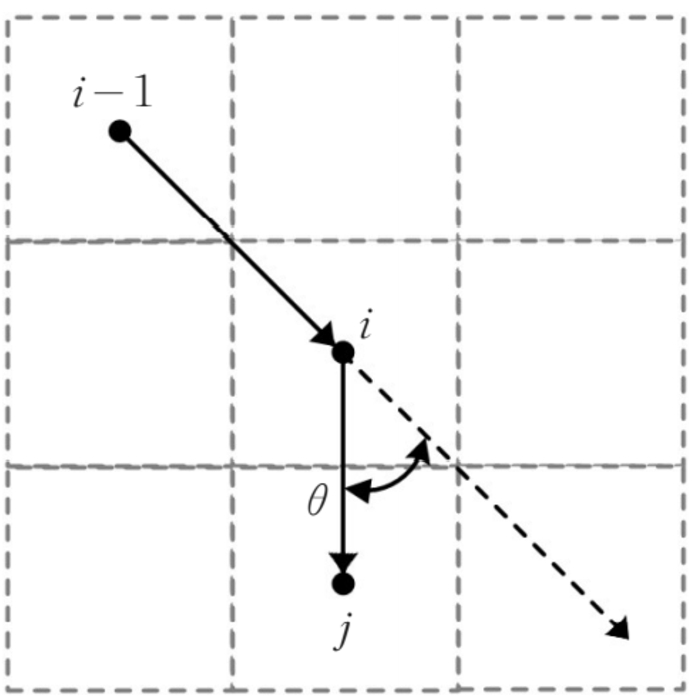
Schematic diagram of traveling steering angle.
In formula (10), α is the pheromone heuristic factor, β is the expected heuristic factor,
The improved bidirectional ant colony algorithm is used to solve the intelligent fire evacuation map path planning, the specific process of the problem is shown in Fig. 5.
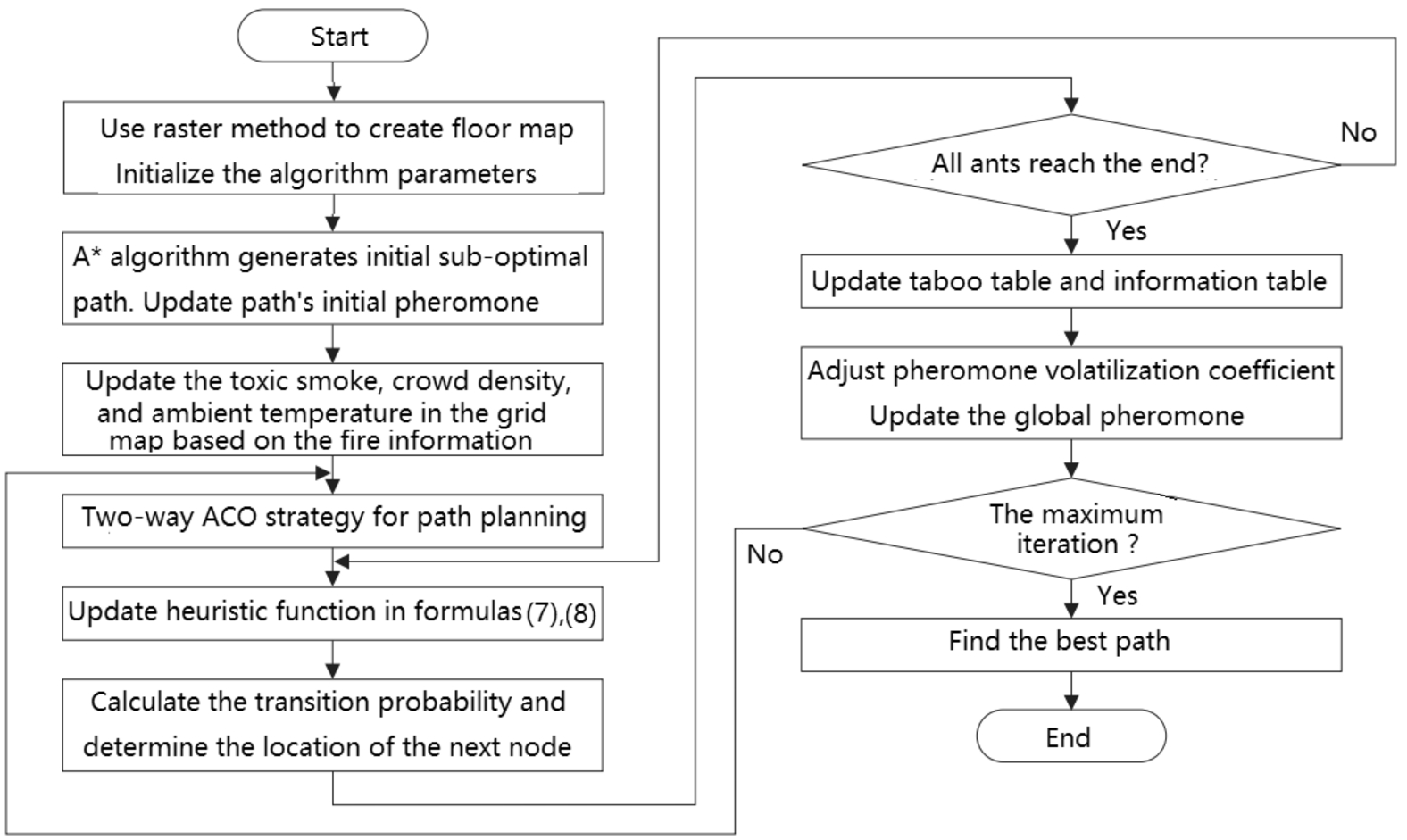
Improved bidirectional ant colony algorithm flowchart.
The influence of risk attitudes of suppliers and retailers without capital constraints on optimal decision-making
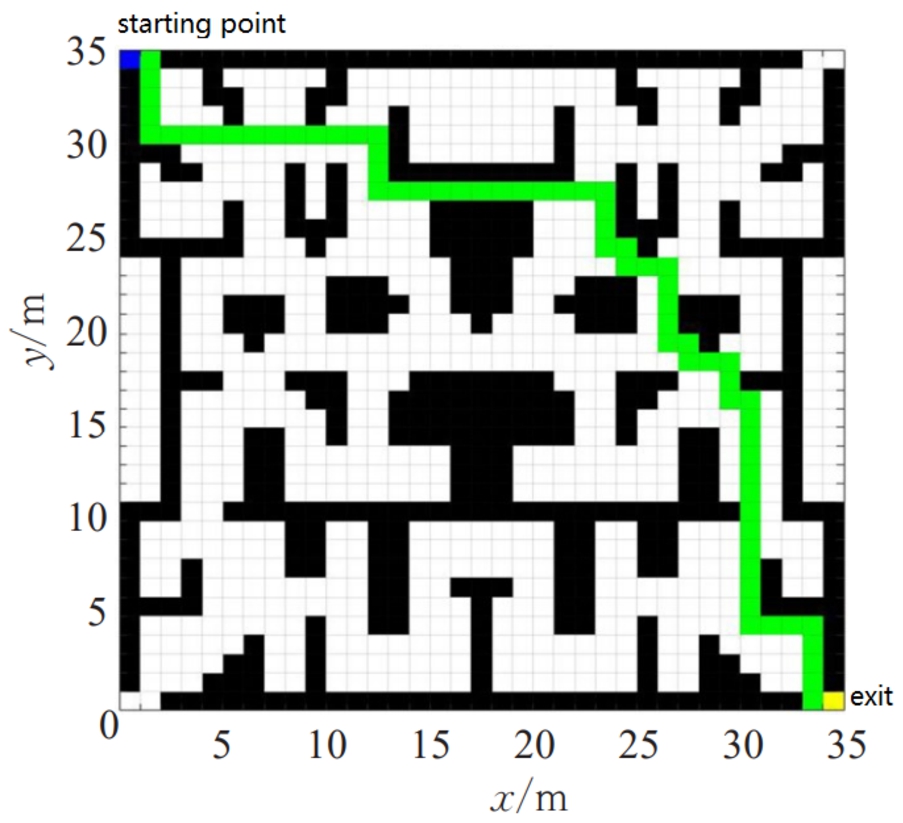
In order to facilitate the observation and verification of the effectiveness of the bidirectional improved ant colony algorithm, MATLAB 2019 software was used to simulate and compare the ant colony algorithm (ACO), the elite ant colony algorithm (EACO), the improved ACO algorithm (IACO) [40] and the improved two-way ACO algorithm (ITACO) in this paper. The established two-dimensional floor map is used for simulation analysis, and the coordinates of the starting point of escape is set as (1, 1) and the coordinates of the end point is set as (35, 35). When there is no emergency situation such as fire, four algorithms are used to simulate the fire evacuation path of the intelligent fire evacuation map. The parameters of the improved two-way ant colony algorithm (ITACO) are set as the expected heuristic factor
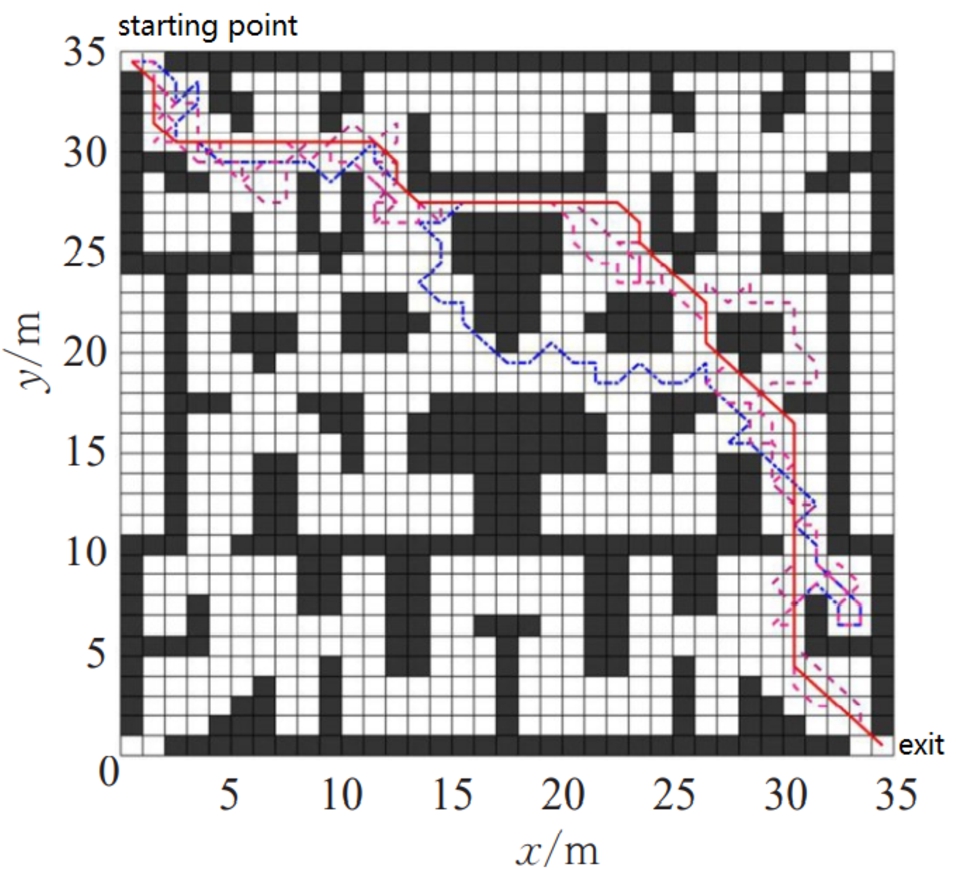
Comparison of evacuation paths of the four algorithms when not on fire.
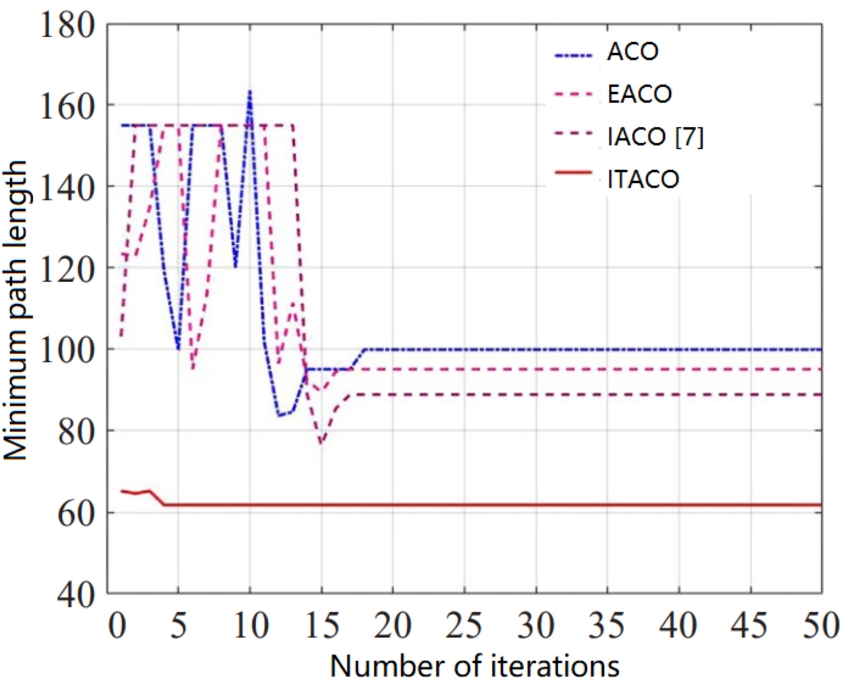
Convergence curve comparison chart of the four algorithms when not on fire.
Comparison of four algorithm data when not on fire
From Figs 6, 7 and Table 2, it can be seen that when there is no emergency such as fire, compared with the traditional ant colony algorithm (ACO), the elite ant colony algorithm (EACO), the improved ACO algorithm (IACO) [40], the improved two-way ACO algorithm (ITACO) in this paper has a faster and more stable convergence speed, and the search optimal path is shorter, the number of turns is less, and the path is smoother. This improves the efficiency of evacuation and reduces the time for safe evacuation.
In the event of a fire, since the optimal evacuation path is not necessarily the shortest path, the evacuation path must be the shortest while ensuring the safety of the escaped personnel. The comparison diagrams of the evacuation paths and convergence curves of the four algorithms are shown in Figs 8 and 9, and the data comparison is shown in Table 3.
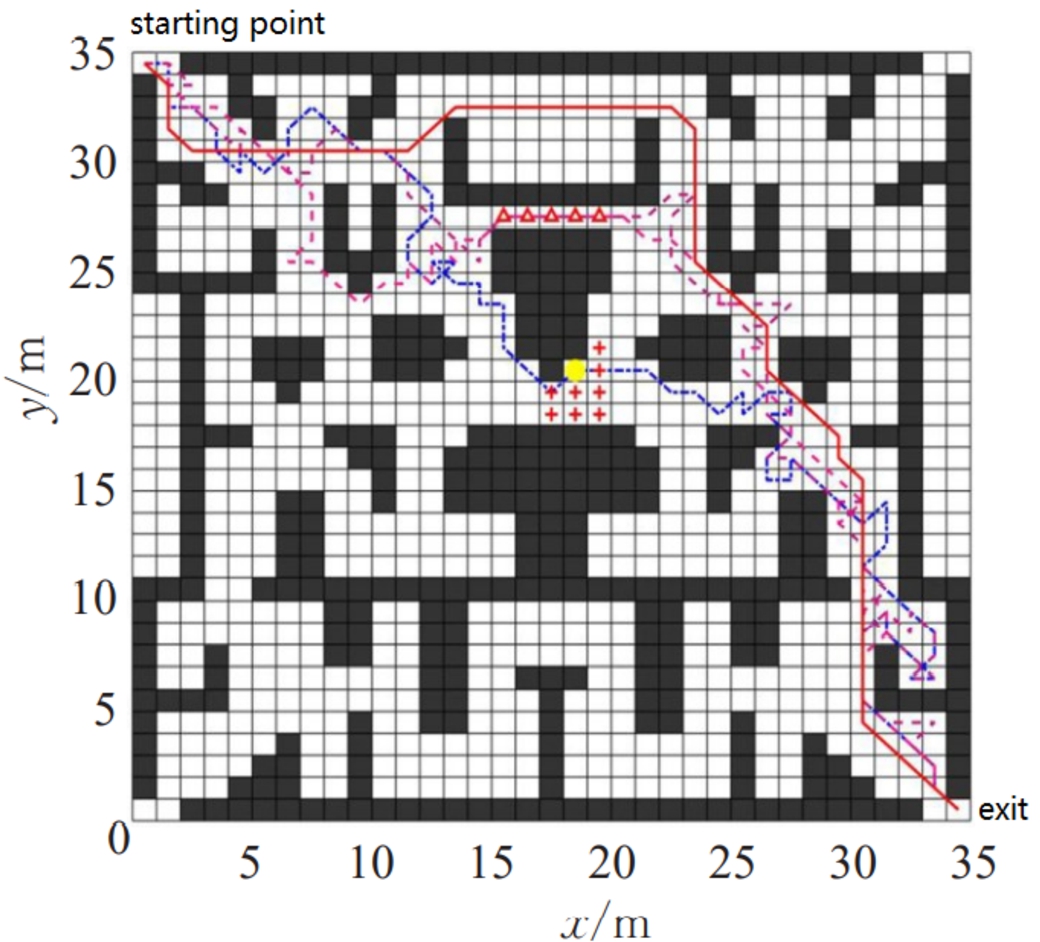
Comparison of evacuation paths of four algorithms during fire.
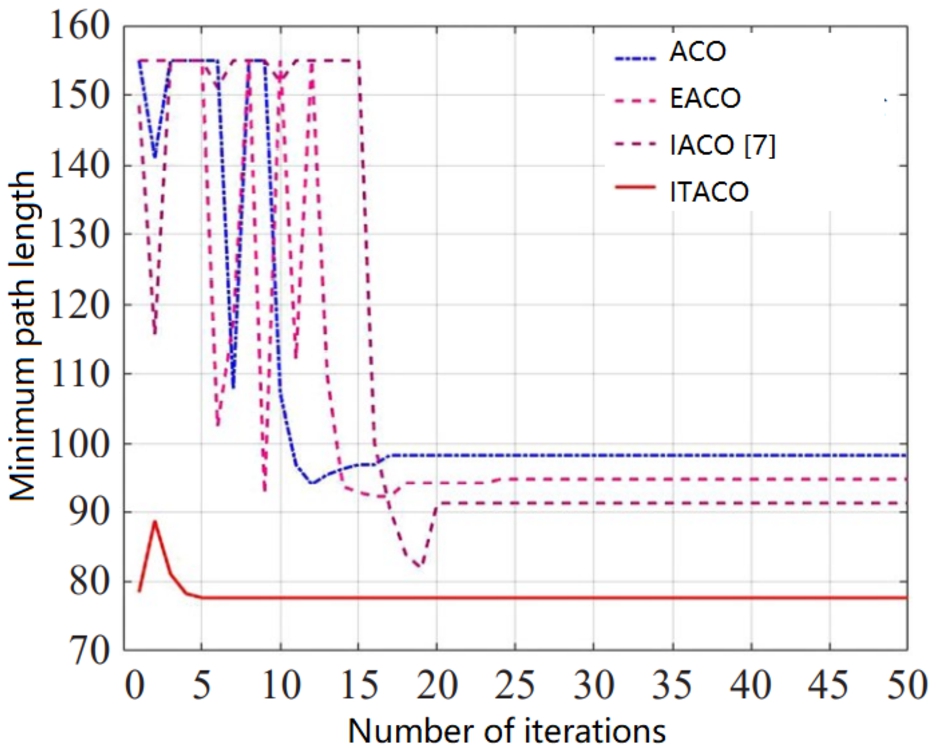
Convergence curve comparison diagram of four algorithms when on fire.
Comparison of four algorithm data when on fire
The circular position in the picture is the fire point, the plus sign area is the high temperature or toxic smoke area affected by the fire, and the triangle area is the crowded area. It can be seen from Figs 8, 9 and Table 3 that when a fire occurs, compared with other algorithms, the convergence speed of the improved two-way ant colony algorithm (ITACO) is still very fast, the number of turns is less, the path is smoother, and the toxic smoke affected by the fire is avoided. In areas with high temperature and densely populated people, it is compared to when there is no fire, the overall path is longer. However, the safety of escaped personnel is guaranteed and the efficiency of evacuation is improved.
Figure 10 is the comparison diagram of the changes in the volatilization coefficient of the ITACO algorithm in this paper when the fire affected areas are 150, 100, 55, 40 and not on fire.

Comparison chart of the change of the volatilization coefficient of the ITACO algorithm in this paper under different conditions.

When a fire occurs, the traditional ant colony algorithm (ACO) searches for all ants routes.
It can be seen from Fig. 10 that the volatilization coefficient is relatively large in the initial stage of the algorithm when there is no fire. As the iterations’ number of the algorithm continues to increase, the volatilization coefficient continues to decrease, and at the same time its decrease rate continues to accelerate, when it is reduced to the set minimum value, it will not change. Due to the large volatilization coefficient in the early stage, the algorithm convergence speed is accelerated, and then as the number of algorithm iterations increases, it is easy to fall into the local optimal situation, and the volatilization coefficient continues to decrease, which enhances the algorithm’s global search ability and reduces the local optimal probability. When a fire occurs, the overall change trend of the volatilization coefficient remains unchanged. However, due to the presence of fire-affected areas, the initial value of the volatilization coefficient becomes smaller and the decrease rate becomes faster. The residual pheromone on the path has a greater guiding effect on ants than when it is not on fire, making it easier for ants to identify fire-affected areas. At the same time, the global search capability has also been improved earlier due to the adjustment of the volatilization coefficient, which reduces the risk of falling into a local optimum.

When a fire occurs, the improved two-way ACO algorithm (ITACO) searches for all ants routes.
Figures 11 and 12 are the traditional ant colony algorithm (ACO) and the improved two-way ant colony algorithm (ITACO) in this paper, respectively, to search for all ants when a fire occurs. The number of grids searched by all ants in the traditional ant colony algorithm (ACO) is 203, while the number of grids searched by all ants in the improved two-way ant colony algorithm (ITACO) is 288. It can be seen that the use of ITACO search strategy not only reduces the number of iterations and improves the search efficiency, but also makes the algorithm search area wider. Combined with the adaptive volatilization coefficient, it improves the global search ability in the later stage of the algorithm and reduces the risk of the fall into the local optimum. At the same time, searching for ants also avoids the fire-affected area with a high probability, ensuring the safety of the evacuation route.
In the actual evacuation, you can’t just plan a single exit escape route, you need to plan an evacuation route corresponding to multiple exits at the same location, that is, single-start multi-exit route planning. In this way, when a certain exit cannot be used, the survivors can be evacuated from other exits in time. At the same time, it also reduces the flow of people at a single safety exit, and reduces the occurrence of personnel congestion and trampling. For the convenience of observation, based on the established three-dimensional floor map, a single-start four-exit path planning strategy is set, and the improved algorithm (ITACO) of this paper is used to simulate the intelligent fire-fighting evacuation map. The building is set to three floors, and each floor has four safety exits, which are marked in the figure. The green origin point on the third floor is set as the place where the smart fire evacuation map is placed, that is, the starting point. The exit of the building is on the first floor, and the standard for evacuation is to reach the exit on the first floor. When there is no fire, the simulation result is shown in Fig. 13. “ ” in Fig. 13 is exit in English.
” in Fig. 13 is exit in English.

When there is no fire, the four-exit three-dimensional evacuation path in the ITACO algorithm.
When a fire occurs on the third floor of a building, the evacuation path of the improved two-way ant colony algorithm (ITACO) is shown in Fig. 14. “ ” in Fig. 14 is exit in English. The red circle in the picture represents the fire point, the plus sign area is the high temperature or toxic smoke area affected by the fire, and the triangle area is the crowded area.
” in Fig. 14 is exit in English. The red circle in the picture represents the fire point, the plus sign area is the high temperature or toxic smoke area affected by the fire, and the triangle area is the crowded area.

In case of fire, four-exit three-dimensional evacuation path in the improved two-way ACO algorithm (ITACO).
It can be seen from Fig. 14 that the ITACO algorithm not only plans the escape routes of the four exits, but also avoids the fire-affected areas, thereby improving the efficiency of safe evacuation and reducing the loss of personnel and property while ensuring the safety of escaped personnel.
In the event of a fire and other emergencies, the intelligent fire evacuation map can not only instruct people to escape from the building, but also guide the escaped personnel to a safe area to wait for rescuers to arrive. The red circle on the third floor is set as the starting point, and the green circle on the second floor is set as the safe area. Figure 15 shows the four-exit three-dimensional evacuation path with the improved algorithm (ITACO) in this paper, “ ” in Fig. 15 is exit in English. the escaped personnel is guided to a safe area. It can be seen from the figure that the improved algorithm (ITACO) in this paper separately plans the evacuation paths for the four exits to evacuate to the safe area, and provides multiple evacuation paths for the evacuees to facilitate their choice. At the same time, the efficiency of personnel escape and the success rate of evacuation are improved.
” in Fig. 15 is exit in English. the escaped personnel is guided to a safe area. It can be seen from the figure that the improved algorithm (ITACO) in this paper separately plans the evacuation paths for the four exits to evacuate to the safe area, and provides multiple evacuation paths for the evacuees to facilitate their choice. At the same time, the efficiency of personnel escape and the success rate of evacuation are improved.

Three-dimensional evacuation paths with four exits of ITACO algorithm in designated areas.
Fire is one of the most serious disasters faced by mankind. The investigation of the building fire scene showed that one of the important reasons for the injuries in the fire was the mistakes in the evacuation of the people at the fire scene. The behavior errors of evacuees at the fire scene is a very complex problem, which is not only related to the behavior factors that affect the evacuation of people, but also related to the cognitive mode of people in the fire evacuation. It is necessary to study the basic principles of behavior and the characteristics of building fires, define the connotation of human errors in building fires, analyze the mechanism and classification of evacuation errors in building fires, and establish corresponding models to reduce mistakes in evacuation in the fire of buildings. The architectural environment is always changing, as high-rise buildings and complex interior spaces are constructed, causing a wide variety of unpredictable disasters and accidents. Hence, effective disaster prevention and rescue are crucial to the protection of life and property.
In this paper, the fire evacuation path planning of the intelligent fire evacuation map is researched, and an improved two-way ant colony (ITACO) algorithm is proposed. In order to verify the actual effect of the algorithm, the grid method was selected to establish a floor grid map, and the traditional ant colony algorithm (ACO), the elite ant colony algorithm (EACO), the improved ACO algorithm (IACO) [40] and the improved two-way ant colony algorithm (ITACO) were simulated and analyzed. The simulation experiment showed that the bidirectional search strategy was used, this enlarges the search space of the algorithm and improves the search efficiency of the algorithm. Combined with the
The Internet of Things technology is used in the field of fire protection, which can greatly improve the effectiveness of supervision [24]. Recently, firefighting has gradually used emerging information technologies such as the Internet of Things and sensors to accelerate the construction of smart firefighting. Fire fighting is an extremely dangerous and complex task. Firefighters are always facing life threats during fire fighting, especially when they are performing tasks indoors. In order to improve the efficiency of fire fighting and ensure the safety of operators, it is necessary to accurately track and locate each firefighter. In order to obtain its current location and orientation information for better monitoring management and scheduling.
An intelligent integrated fire rescue system could provide real-time status updates, alarm reports, and evacuation guidance, improving fire rescue techniques through a combination of contemporary autosensing and communication systems. To achieve the aim, existing firefighting equipment, Bluetooth sensors, global positioning information, an optimal fire rescue path planning algorithm, and visual technology were used to construct a framework of dynamic rescue/evacuation procedures for fire departments [5]. By providing the locations of firefighters and trapped occupants, real-time updates for optimal path planning in a dynamic environment provide fire departments with accurate and useful information regarding the fire site in real time. The use of robots to replace humans to deal with fires is a modern trend. A new type of autonomous firefighting robot has been designed and developed [14], an automatic process with a microcontroller is used to ease emergency firefighting. The robot can be controlled by the user through its Bluetooth control function, It can also run by itself when needed. It will detect the source of the fire by itself and spray water to extinguish it until the fire is extinguished.
The most basic of the smart fire-fighting IoT monitoring system is to monitor the real-time status of automatic fire-fighting alarm hosts and fire detectors, manual alarm devices, fire-fighting linkage devices and other equipment through sensors, and conduct real-time monitoring, collection and collection of various parameters in high-risk key areas and surrounding environments. Storage, including pressure, liquid level, temperature, humidity and other data, form a monitoring and early warning historical database, and provide data support for further data analysis. In the firefighter positioning equipment, in the firefighter positioning equipment, at present, sensing components such as acceleration sensors, gyroscopes, magnetic sensors and air pressure sensors are mostly used to achieve the purpose of tracking and positioning based on the principle of inertial motion measurement. It can effectively predict potential safety hazards in advance, track and locate and quickly deal with accidents.
The use of fire-fighting positioning equipment enables the on-site command center to easily understand the relative position of the firefighters in the current fire, so as to quickly guide rescuers to the best route to the incident, and win precious time for fire fighting and rescue. Secondly, detailed and clear location information of all staff is also conducive to the on-site command center to deploy reasonable personnel based on the development of the fire, and to send early warning and evacuation information to personnel in relevant locations. The realization of the above functions are all inseparable from the cooperation of the measuring elements in the positioning device. Among them, the acceleration sensor and the gyroscope mainly play the role of position and speed measurement, and the magnetic sensors form an electronic compass for position recognition. The air pressure sensor determines the height of the wearer’s position through changes in the measured value.
Footnotes
Acknowledgements
This work was supported by the Scientific Research Project (NO.20B337) of the Hunan Provincial Education Department.
Conflict of interest
None to report.