The elasticity problem for two domains separated by a heterogeneous layer of the thickness ε is considered. The layer has an ε-periodic structure, , including a multiple cracks and the contact between the structural components. The inclusions are surrounded by cracks and can have rigid displacements. The contacts are described by the Signorini and Tresca-friction conditions. In order to obtain preliminary estimates, a modification of the Korn inequality for the ε-dependent periodic layer is performed.
An asymptotic analysis with respect to is provided and the limit elasticity problem is obtained, together with the transmission condition across the interface. The periodic unfolding method is used to study the limit behavior.
The elasticity problem in a domain containing a thin periodic heterogeneous layer of the small thickness ε is studied in this paper. The layer is made of a soft material whose stiffness is of the order of ε and includes cracks and multiple micro-components. Examples of application of such structures include foam materials, used for damping, e.g., in car or plane seat cushions, as well as spacer fabrics, used in protection wear or as geo-textiles, drainages, where certain outer-plate stiffness is required.
The considered layer includes closed and open cracks. Closed cracks completely surround inclusions, which can have rigid displacements. The considered contact condition combines the Signorini problem with the Tresca-friction contact condition. Our aim is to investigate the influence of the local friction on the effective interface transmission condition between the domains.
There exists a large number of papers devoted to the problems with layers of different structure. Depending on relation between small parameters involved in geometry and stiffness of the layers, different limit problems can be obtained. In particular, [1,2,9,11,14,20] deal with Neumann sieves of different thickness and sizes of inclusions. [3,4] consider the case of a thin stiff layer. [15–17,19] consider the layers with the same stiffness as main domains. A case of a soft homogeneous layer is discussed in [12,18]. The elasticity problem for a heterogeneous domain with the Tresca-type friction condition on a microstructure (involving inclusions and cracks) was considered in [10,13] and Korn’s inequality for disconnected inclusions was obtained.
For the derivation of the limit problem we use the periodic unfolding method, which was first introduced in [6], later developed in [7] and was used for different types of problems, particularly, a contact problem in [10] and problems for thin layers in [9,20].
However, additional difficulties arise in proving uniform boundedness for the minimizing sequence of the solutions. The idea consists in controlling the norm on a domain by the trace on its boundary and, therefore, by the norm on the outside domain. Working this way we first obtain estimate for the Dirichlet domain, through which an estimate for the trace is obtained and, therefore, norm on the structural components of the layer. Two Korn’s inequalities are introduced: for the inclusions placed in the heterogeneous periodic layer (based on the results from [10]) and for the connected part of the layer. The main result of the study is an asymptotic model for the layer between elastic blocks.
The paper is organized as follows. Section 2 gives the geometric setting for the ε-periodic problem, including the unit cell. In Section 3 we establish a Korn inequality for the matrix of the layer and then obtain an estimate for the entire structure. Section 4 deals with the convergence result. In Section 5 the problem for fixed ε is introduced. At last, in Section 6 the limit problem is obtained and the case of the linearized contact conditions is considered.
Notations
Let be a bounded domain in with a Lipschitz boundary. For any , the normal component of a vector field v on the boundary of is denoted , while the tangential component is denoted (ν is the outward unit normal vector to the boundary).
The strain tensor of a vector field v is denoted by ,
The kernel of e in a connected domain is the finite dimensional space of rigid motions denoted by .
Geometric statement of the problem
In the Euclidean space consider a connected domain ω with Lipschitz boundary and let be a fixed real number. Define:
The following notations are introduced to describe a structure with a layer:
Here ε is a small parameter corresponding to the thickness of the layer.
The assemblage is fixed on Γ, which is a non-empty part of (Γ is a set where the Dirichlet condition will be prescribed). Furthermore, we assume that the external boundary of the layer is traction free.
The unit cell Y.
The layer has a periodic in-plane structure. The unit cell is denoted Y
Additionally,
are the lower and upper boundaries of Y.
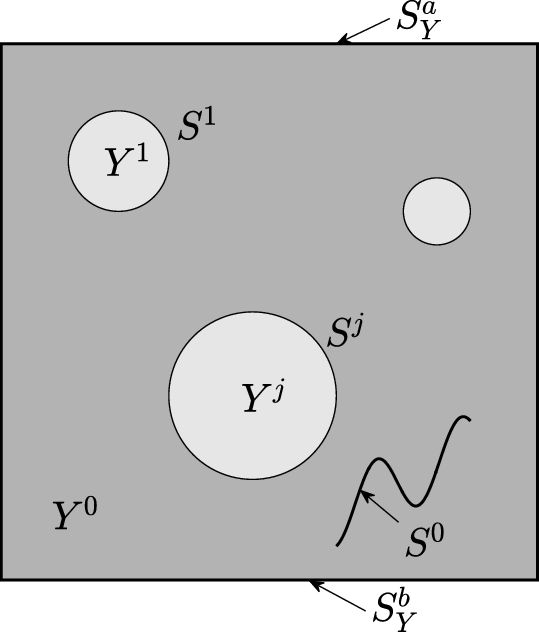
There are two kinds of cracks, the first ones (the “closed cracks”) are the closed boundaries of open Lipschitzian sets , . We assume that every , , has only one connected component and . The other cracks (the “open cracks”), whose union is denoted by , are the finite union of closed Lipschitz surfaces included in (see Fig. 1).
We set
and assume that there exists such that
We make the assumption that the set satisfies the hypotheses of the paper on the unfolding for holes [5] (concerning the set which is denoted in [5] by ). The results from [5] will be our essential tools in the present paper. As in [5], we require that satisfy the Poincaré–Wirtinger inequality (for the space ), and that the union of and its direct neighbors are connected.
Since the set of cracks is a closed subset strictly included in Y, there exists such that
Denote
Recall that in the periodic setting almost every point (resp. ) can be written as
Denote by
,
, ,
, .
For introduce the set
The boundary is the set of “closed cracks” associated with ,
For set
and
The union of all the cracks is denoted by
We define the sets and as follows
Note that from these definitions it is clear that there are no cracks in the part of the layer .
For a function v defined on , for simplicity, we denote its restriction to by
In the following, for any bounded set and , denotes the mean value of φ over , i.e.
Some inequalities related to unfolding and the geometric domain
The boundary-layer unfolding operator ,
Here we recall the definition and the properties of the boundary-layer unfolding operator (for more details see [9]).
For φ Lebesgue-measurable on (resp. on , ), the unfolding operator is defined by
For φ Lebesgue-measurable on , , the unfolding operator is defined by
If , , , is just the trace of on the inner side of .
(Properties of the operators , ).
For any,
For any,
Let. ThenIn a similar way, for any
For any,and
Proofs for the properties 1–3 can be found in [9]. For the last property starting from the right-hand side we obtain
□
Unilateral Korn inequality
Let be a bounded open subset of . We denote
Following the ideas from [10] we recall that a bounded domain satisfies the Korn–Wirtinger inequality if there exists a constant such that for every there exists such that
A domain like is called a Korn-domain. We equip with the following scalar product
If is a Korn-domain, the associated norm is equivalent to the usual norm of .
For a Korn-domain denote
Observe that there exists a constant C such that for every we get
Considering the orthogonal decomposition , every can be written as
The map is the orthogonal projection of v on . From (3.3) we get
We also recall that if is a bounded Lipschitz domain, there exists a constant C such that
We will use the following proposition from [10].
Ifis a bounded Lipschitz domain, then there exists a constant C such that
We denote the center of gravity of , .
Let u be in and , , the orthogonal projection of on . We write
We define the piecewise constant functions and by
These functions belong to and the associated rigid body field, still denoted , belongs to .
There exists a constant C (independent of ε) such that for everyand for every u in,
Applying (3.4) (after ε-scaling) gives
Then adding the above inequalities (with respect to ξ) yields (3.8)1. Taking into account (3.6) (after ε-scaling), we get
Adding these inequalities (with respect to ξ) gives
Finally, estimate (3.8)3 is an immediate consequence of (3.8)1 and (3.8)2. □
Due to (3.6) and then (3.9), we also obtain
The constants do not depend on ε.
Korn inequality for a perforated layer
Now we want to derive the Korn inequality for the simply connected part of the layer.
Denote
There exists a constant C independent of ε such that for every u inWe also have
Step 1. First, we restrict u to a subset of the domain without cracks and then construct an “extension” of u. We set
The domain is a bounded domain with a Lipschitz boundary. Moreover, observe that . Therefore there is an extension operator from into and a constant C (which depends on η) such that (see [8])
Let and the projection of w on , we have
The constant depends on η.
Now for every we define the extension of w. From (3.14) and (3.15) we get
Applying the above result to the restriction of the displacement to the cell , allows to define an extension of u in the layer . Estimate (3.16) leads to
The constants do not depend on ε.
We set in . The displacement belongs to , it vanishes on Γ and satisfies
The constants do not depend on ε.
Step 2. From the Korn’s inequality, the hypothesis that the measure of Γ is positive and (3.17)2 we obtain
Step 3. We prove (3.12). Since by construction the domain is a Korn-domain, there exists a constant such that for every equal to zero on
Applying the above result to the restriction of the displacement to the cell , , gives
The constants do not depend on ε. Hence, using the fact that vanishes in and due to estimate (3.18), we obtain
Combining the above inequalities and (3.18) gives (3.12).
Step 4. We prove (3.13). The Korn inequality and the trace theorem give
Besides we have
Taking into account the above estimates (3.20)–(3.21) together with (3.18)–(3.19) we obtain (3.13). □
We set
where is the set of functions vanishing on and constants on each cell , . The rigid displacements are defined by
We will denote by the jump of the vector field across the surface , . More precisely, for we set , , and we define , , and by
The space is usually equipped with the following norm (which is adjusted to the considered case where the layer and the inclusions are made of a soft material):
With the above norm, is a Hilbert space. But the following norm over is well adapted to the contact problem:
where
Below we summarize the estimates for .
There exists a constant C independent of ε such that for all
The estimates (3.26) are the immediate consequences of (3.13) and (3.8). □
From (3.11) we also obtain
The constant does not depend on ε.
Further we will consider the following symmetric bilinear form on :
where
The tensor fields , , have the following properties.
Symmetry:
Boundedness: belongs to and
The constant does not depend on ε.
Coercivity (with constant independent of ε):
Convergence results
Every is extended by reflexion in a displacement belonging to . Denote
Before giving the convergence results, we prove the following lemma of homogenization.
Letbe a sequence insatisfyingwhere the constant C does not depend on ε. There exist a subsequence – still denoted ε – and,,such thatMoreover, we have
The function is extended by reflexion in a function belonging to in order to obtain convergence (4.2)2.
We only prove the first equation in (4.3), the second one is obtained in the same way. Consider the function defined by
It satisfies
Hence . Due to the convergences (4.2)1 and (4.2)3 we have
Since the trace of the function on the face vanishes for a.e. the result is proved. □
Let,, be a sequence insatisfyingwhere the constant C does not depend on ε. There exist a subsequence – still denoted ε – and,,,,and(), such thatMoreover we haveFurthermore, settingwe get
The convergences (4.5) are the immediate consequences of the estimates (3.26). To prove (4.6) we apply the Lemma 4.1 with the fields of displacements introduced in Step 1 of the Proposition 3.4. □
The contact problem for fixed ε
Let be the convex set defined, for non negative functions belonging to , , by
The vector fields are the admissible deformation fields with respect to the reference configuration . By standard trace theorems, the jumps belong to . The tensor field
is the stress tensor associated to the deformation v (not to be confused with the surface measures !).
The functions and the ’s are the original gaps (in the reference configuration), and the corresponding inequalities in the definition of represent the non-penetration conditions. In case there is a contact in the reference configuration, these functions are just 0.
Consider also the family of convex maps , , where is non negative, continuous on and satisfies
In case of Tresca friction, the maps are explicitly given by
with bounded from below by for .
Given in find a minimizer over of the functional
where
From the properties of convexity of the , , the solutions of are the same as that of the following problem:
Find such that for every ,
The strong formulation of the problem is (with for the stress tensor ):
where denotes the subdifferential of .
The corresponding explicit Tresca conditions on the interfaces with the function given in (5.3) are as follows:
Our aim now is to study the behavior of the solutions for small values of the parameter ε. We will do this by studying the asymptotic behavior of the sequence for . When ε tends to zero, the thin layer approaches the interface Σ. The domain tends to the domain .
A priori estimates and existence of solutions for the Problem
The first step in the proof of existence of the solution consists in obtaining a bound for minimizing sequences. Since for we have , without loss of generality we can assume that every field u of a minimizing sequence satisfies .
(Estimate for minimizing sequences of ).
We assume thatThen, there exists a constant C which does not depend on ε, such that for every fieldusatisfyingwe have
At first, note that the assumption (5.7) means that the total load applied to the layer does not depend on ε.
For simplicity’s sake, we set
Let u be in , such that . We have
Now we use (3.26)2 to get
Using (3.8)2, the last term on the right-hand side of (5.9) is simply bounded as follows:
Hence
From the above inequality and (5.9) we derive
Assumption (5.2) gives
One has
Besides, from the trace theorem (after ε-scaling) and (3.26), we have
Then, the above estimate, (5.14) and (5.13) lead to
By definition of (see (5.1)) we have
Then
The above estimate together with (5.15) yields
Inequality (5.16) and the above one lead to
Now the above estimate and (5.12) give
Then under assumption (5.7) and (3.26)3 we obtain (5.8). □
(Existence of solutions for ).
Under the assumption (
5.7
) there exists at least one global minimizer for the functional.
Let be a minimizing sequence for . Due to (5.8) and (3.27) there exists a constant C which does not depend on η (but which depends on ε) such that
Since is bounded from below, convex and weakly lower semi-continuous as a sum of weakly lower semi-continuous functions, there exists at least a minimizer for . □
Let , be two minimizers of , both fields satisfy (5.5). Hence
Main result
In this section we only consider the case of Tresca friction.
Hypotheses on , and
To pass to the limit in the homogenization process, we need structural assumptions concerning the Tresca data which are more precise than those of Section 5. Hence we assume that there exist
, , such that
and therefore
, , such that
This choice of the parameter corresponds to the Tresca friction coefficient .
, , such that
The Assumption (5.7) becomes
which is fulfilled for small enough .
The limit problem
We equip the product space
with the norm
where .
We set
For any , as in Section 5, we define , , , , and
Now we introduce the closed convex set
This condition means
Assumeand,,satisfy the hypotheses of Section
6.1
and also assume that (
6.2
) is fulfilled. Suppose that the following assumption holds: there exists a tensorsuch that, as,Letbe the solution of Problem (
5.5
), then there exist a subsequence – still denoted ε – andsuch that ()whereis the space of bounded measures on ω with values in.
The limit fieldUsatisfies the following unfolded problem:where
Based on the Proposition 5.1 and the assumptions of Section 6.1, the solution of Problem is uniformly bounded with respect to ε. Hence up to a subsequence of ε (still denoted ε), the convergences of Theorem 4.1 hold. Therefore, we should show that the limits furnished by the Theorem 4.1 satisfy a homogenized limit problem. The main point now is to pass to the limit in (5.5).
Let be in
We use the following test function :
By construction we have ()
We rewrite (5.5) in the form
Therefore, by unfolding and due to the convergences in Theorem 4.1 and the equations and convergence in (6.6), we have
By the lower semi-continuity with respect to weak (or weak-*) convergences, we first obtain
then unfolding the term corresponding to the Tresca friction, passing to the limit and making use of lower semi-continuity give
Considering the terms corresponding to the applied forces we get
In a similar way
Using the established convergences we obtain
Subtracting the terms on the right-hand side from the left-hand side we get (6.4). By a density argument, (6.4) holds for any . □
Since the functional
is weakly lower semi-continuous and convex over , Problem (6.4) is equivalent to finding a minimizer over of the functional . The field U obtained in Theorem 6.1 is a global minimizer of this functional over and every limit point of the sequence is a global minimizer of .
For everythere exists a constantsuch that for anysatisfyingwe have
From the expression (6.7) of , we first deduce that implies
From the Korn inequality and the trace theorem we get
where constant C depends on the geometry of the sets , , ω, and ().
Now, in the case and , from Proposition 3.2, there exist constants C which depend on () such that
Due to the definition of we have . Proceeding as in the proofs of Propositions 3.3 and 5.1 and thanks to the condition (6.2) and the above inequalities, we deduce the existence of a constant such that (we recall that )
Then for general elements , using regularization by convolution in and this last estimate we obtain (6.8). □
Independently of Remark 6.1, using the above lemma we can easily prove the existence of at least one global minimizer for the functional .
Let U and be two global minimizers of the functional . From (6.4) we deduce that
and
Letbe a minimizer ofover,The whole sequenceconverges and we have
As a consequence of Theorem 6.1 we have (with the subsequence of ε introduced in this theorem)
Now, let V be in and let be a sequence of fields in
strongly converging to V in (that is possible using regularization by convolution in ). We fix η and for every we consider the test field belonging to defined by (6.5) and here denoted . Using the subsequence of ε introduced in Theorem 6.1, we can pass to the limit (). Since , due to (6.6) we obtain
Now η goes to 0; that gives
Then
Finally we get and this result holds for the whole sequence . □
Computation of the effective outer-plane properties for a case of heterogeneous layer without contact
Solving (6.4) numerically is difficult because of the presence of non-differentiable non-linear term . Also a complete scale separation is impossible for a non-linear problem.
In this subsection due to application purposes we want to consider a case without a contact. Thus, we assume that the open sets , , are holes. For this case we can give a linear problem whose solution is the couple with Robin-type condition on the interface. The result obtained will be similar to [9,12,19].
The space is replaced by
where . We endowed this Hilbert space with the norm
Now, the closed convex set is replaced by the space . Since for any , also belongs to , the problem (6.4) becomes
Introduce the Hilbert space
We consider the 3 corrector displacements , , defined by
The displacements , , satisfy
Below we give the variational problem satisfied by .
Letbe the solution of (
6.10
). We haveand the coupleis the solution of the following variational problem:where H is thesymmetric matrix with coefficients indefined byMatrix H is the homogenized tensor of the effective outer-plane stiffness and the’s () are the solution of the cell-problem (
6.11
).
Take as test-displacement in (6.10). That gives
Hence, using the corrector displacements , , we express .
Let be in , we set . We consider as a test function in (6.10). Then we develop and we obtain (6.13). □
Footnotes
Acknowledgement
This work was supported by Deutsche Forschungsgemeinschaft (Grants No. OR 190/4-2 and OR 190/6-1).
References
1.
N.Ansini, The nonlinear sieve problem and applications to thin films, Asymptotic Analysis39(2) (2004), 113–145.
2.
N.Ansini, J.F.Babadjian and C.I.Zeppieri, The Neumann sieve problem and dimensional reduction: A multiscale approach, Math. Models Methods Appl. Sci.17(5) (2007), 681–735. doi:10.1142/S0218202507002078.
3.
A.L.Bessoud, F.Krasucki and G.Michaille, Multi-materials with strong interface: Variational modelings, Asymptotic Analysis61(1) (2009), 1–19.
4.
A.L.Bessoud, F.Krasucki and G.Michaille, A relaxation process for bifunctionals of displacement – Young measure state variables: A model of multimaterial with micro-structured strong interface, Annales de l’Inst. Henri Poincaré, Analyse Non Linéaire27(2) (2010), 447–469. doi:10.1016/j.anihpc.2010.01.007.
5.
D.Cioranescu, A.Damlamian, P.Donato, G.Griso and R.Zaki, The periodic unfolding method in domains with holes, SIAM J. of Math. Anal.44(2) (2012), 718–760. doi:10.1137/100817942.
6.
D.Cioranescu, A.Damlamian and G.Griso, Periodic unfolding and homogenization, C. R. Acad. Sci. Paris Ser. I335 (2002), 99–104. doi:10.1016/S1631-073X(02)02429-9.
7.
D.Cioranescu, A.Damlamian and G.Griso, The periodic unfolding method in homogenization, SIAM J. of Math. Anal.40(4) (2008), 1585–1620. doi:10.1137/080713148.
8.
D.Cioranescu, A.Damlamian and G.Griso, The periodic unfolding for a Fredholm alternative in perforated domains, IMA Journal of Applied Mathematics (2012), 1–18.
9.
D.Cioranescu, A.Damlamian, G.Griso and D.Onofrei, The periodic unfolding method for perforated domains and Neumann sieve models, J. Math. Pures Appl.89 (2008). doi:10.1016/j.matpur.2007.12.008.
10.
D.Cioranescu, A.Damlamian and J.Orlik, Homogenization via unfolding in periodic elasticity with contact on closed and open cracks, Asymptotic Analysis82(3–4) (2013).
11.
T.Del Vecchio, The thick Neumann’s sieve, Ann. Mat. Pura Appl. (4)147 (1987), 363–402. doi:10.1007/BF01762424.
12.
G.Geymonat, F.Krasucki and S.Lenci, Mathematical analysis of a bonded joint with a soft thin adhesive, Math. Mech. Solids4 (1999), 201–225. doi:10.1177/108128659900400204.
13.
G.Griso, Decompositions of displacements of thin structures, J. Math. Pures Appl.89 (2008), 199–223. doi:10.1016/j.matpur.2007.12.007.
14.
N.Kikuchi and J.T.Oden, Contact Problems in Elasticity: A Study of Variational Inequalities and Finite Elements Methods, SIAM, USA, 1988.
15.
F.Krasucki and S.Lenci, Yield design of bonded joints, Eur. J. Mech. A/Solids19 (2000), 649–667. doi:10.1016/S0997-7538(00)00173-X.
16.
F.Lebon and R.Rizzoni, Asymptotic analysis of a thin interface: The case involving similar rigidity, Int. J. Eng. Sci.48(5) (2010), 473–486. doi:10.1016/j.ijengsci.2009.12.001.
17.
J.Marigo and C.Pideri, The effective behavior of elastic bodies containing microcracks or microholes localized on a surface, International Journal of Damage Mechanics20 (2011), 1130–1150. doi:10.1177/1056789510395555.
18.
A.Mikelic, M.Shillor and R.Tapiero, Homogenization of an elastic material with soft inclusions in frictionless contact. Recent advances in contact mechanics, Math. Comput. Modelling28(4–8) (1998), 287–307. doi:10.1016/S0895-7177(98)00123-X.
19.
M.Neuss-Radu and W.Jäger, Effective transmission conditions for reaction-diffusion processes in domains separated by an interface, SIAM J. of Math. Anal.39(3) (2007), 687–720. doi:10.1137/060665452.
20.
D.Onofrei, The unfolding operator near a hyperplane and its application to the Neumann sieve model, Adv. Math. Sci. Appl.16(1), 239.