The aim of this paper is to first study a Cahn-Hilliard model for brain lactate kinetics with a control function. This control allows for optimal treatment administered to ill patients suffering from glioma, in order to reduce their brain lactate concentrations, and thereby to slow down the tumor growth. We establish the well-posedness of the problem and the continuity of the control-to-state mapping, the existence of a minimizer of the objective functional, and its Fréchet differentiability in suitable Banach spaces with respect to the control and with respect to time. Moreover, we derive the first-order necessary conditions that an optimal control has to satisfy. In the second part of the paper, we illustrate our theoretical results with numerical simulations using MRI data from the University Hospital of Poitiers.
Brain tumor refers to any benign or malignant tumor that develops in the brain parenchyma. They arise from the abnormal and uncontrolled development of cell division, either from the brain cells themselves (the primary tumor) or from metastatic cells exported from cancer elsewhere in the body. Primary tumors are rare, but among the most aggressive. The most common primary brain tumors arise from glial cells and are therefore called gliomas. They constitute 50% of primary brain tumors.
The World Health Organization has introduced a classification of these tumors according to their aggressiveness that is commonly used. This classification, called the WHO grading system associates a grade ranging from I to IV, Grade I and II are referred to as low grade, grade III and IV are referred to as high grade.
The brain is an organ with high energy needs. The consumed energy can come from many sources such as glutamate, glucose, oxygen and also lactate [7]. Like other cancers, the glioma lead to alterations of the cell’s energy management. The Warburg effect, namely the persistence of aerobic glycolysis, is a characteristic of cancer cells. Hence the lactate, the end-product of glycolysis, is a hallmark of advanced cancers. In particular, lactate creation, consumption, import and export of a glioma cell play a central role in the cancer development [11,13,15,16,18–20] and may therefore be considered as a key point on the trail for new medications. In [24], the author emphasizes that, disrupting the lactate production and the exchanges by monocarboxylate transporters (MCT1) could become an efficient anticancer treatment in the future. Some papers in the literature already deal with brain cancer and lactates (see for instance [1,2,5,6]) or with cancer and treatment ([8,9,22,23]).
In this paper, our aim is twofold. First, we want to continue/complete the mathematical study of a model for lactate kinetics introduced in [17], replacing the logarithmic potential by a polynomial one and adding a control function allowing for an optimal therapeutic strategy. Basically, the control function simulates a treatment administered to virtual patients suffering from glioma, in order to inhibit the brain lactate exchanges by monocarboxylate transporters and, as a consequence, to slow down the tumor growth. We propose in the second part of the paper some numerical simulations. Using patient data from MRI controlled glioma, we perform the identification of the “patient-dependent parameters” used in our equation, then we illustrate our mathematical results. Our paper is organized as follows. The well-posedness of the state equations is established in Section 3. The existence of a minimizer of the objective functional is proved in Section 4.1, while the unique solvability of the linearized state equations and the Fréchet differentiability of the control-to-state mapping and of the functional are contained in Section 4.2. In Section 4.3, the unique solvability of the adjoint equations is studied. The Fréchet differentiability of the objective functional with respect to time and the first order necessary optimality conditions are respectively derived in Sections 4.4 and 4.5. Additionally, in Section 5 we illustrate our theoretical results with numerical simulations based upon patient data.
Setting of the problem
In comparison to what was done in the first brain lactate kinetics model [3], (see also [6,12]) we neglect here the capillary lactate concentration. More precisely, we only deal with the evolution of the intracellular lactate concentration. We choose such a simpler model because we have in mind the identification of the equation parameters from the patients data. Moreover, following a previous work from [17], we consider here a Cahn-Hilliard type equation. Indeed, unlike more commonly used reaction-diffusion equations, this equation allows to take into account the heterogeneity of the lactate concentrations both in malignant and normal cells. This heterogeneity is now well established (see [14,24]).
We consider the following Cahn–Hilliard model endowed with a polynomial potential:
Ω being a bounded and regular domain of 2 or 3 and the vector ν being the outward unit normal to the boundary . The unknown φ stands for the concentration of intracellular lactate, κ is the maximum transport velocity between the blood and the cell, is a modified Michaelis–Menten positive constant and α is the diffusion coefficient. The term J, assumed constant in this work, characterizes lactate production and consumption. We aim to reduce the lactate concentration by adding a control function ω that stands for the required treatment, expected to inhibit the lactate exchanges in the brain while limiting the side effects. The function ω takes values in the interval ( means no treatment and would correspond to no lactate exchanges). Then the objective functional we intend to minimize reads
where τ represents the treatment time, and the target function of the lactate concentration. The third and fourth terms of penalize respectively large quantities of drug and long treatments, with the aim of limiting the side effects of the treatment. β can be considered as a measure of energy cost needed to implement ω, and is a positive constant.
Let the admissible set be
For simplicity, in Section 3 and 4, we set , leading to . Anyway our results hold for any cubic function. In that case there holds , .
Furthermore the constants κ, , α and J are positive.
We denote by the usual scalar product, with associated norm . We also set , where denotes the inverse of the minus Laplace operator associated with Neumann boundary conditions and acting on functions with null spatial average.
We also denote and .
We set , being understood that, if , then . We also set, whenever this makes sense, .
We note that , , and are norms on , , and , respectively, which are equivalent to the usual norms on these spaces.
We note that is of class , with , so that g is (strictly) monotone increasing and maps onto .
We emphasize that g is not of class . Nevertheless, is a Lipschitz continuous function on . Then it holds:
Throughout this paper, the same letters C, denote (nonnegative or positive) constants which may vary from line to line, or even in a same line. In particular, these constant may depend on T.
Well posedness of the state problem
The proof of existence can be carried out via a standard Galerkin scheme and appropriate a priori estimates. In what follows, we only give formal estimates.
Let us first note that it follows from (2.1) that, formally:
We rewrite (2.1) in the following equivalent weaker form (see [21]):
with and .
(Well-posedness).
We assume thatis given such that.
Then (
3.1
)–(
3.4
) has a unique weak solution φ, such thatand.
From (3.2) we infer:
Let us multiply (3.1) by and integrate over Ω and by parts. This gives:
Moreover, we have:
We note that:
From standard Young’s inequalities we obtain (see [21]),
Hence, taking and , and using (3.5) we get that:
We deduce from (3.6)–(3.8) that
and we conclude with (3.2) that .
Let us next multiply (3.1) by to obtain:
Note that, using the fact that , we get:
Furthermore, we have:
Using the fact that:
we deduce from (3.10)–(3.13) that
Recalling that is equivalent to the norm for functions with null spatial average, we obtain:
This yields that .
Let us next multiply (3.1) by to obtain:
Note that
where .
Furthermore, since g is bounded,
It thus follows from (3.16)–(3.17) that
In view of the regularity in (3.9) this yields that φ and are in and respectively.
Furthermore,
and
Thus we have
Moreover,
Recalling that is equivalent to the norm and is equivalent to the norm for functions with null spatial average, we obtain:
and we deduce that .
Uniqueness and continuity of the control-to-state operator. Let , be two solutions of (2.1)–(2.3) with same initial data , and let be two controls. Setting and , we have
Multiplying the above equation by φ and integrating over Ω leads to
Furthermore, it holds
where
Moreover, since , we have and . It yields
Employing the interpolation inequality
and Agmon’s inequality
it follows that
We thus find
so that
Next noting that with continuous embedding and
it is easy to see that:
We now have:
Note that, in three space dimension , so that:
Employing the interpolation inequality
it follows
and
Collecting the above estimates, we obtain, employing Young’s inequality
so that we deduce
Employing Young’s inequality, we find
Collecting finally (3.20)–(3.22), we conclude
□
We can rewrite (2.1)–(2.3) in the equivalent form
We note that it follows from (3.24) that
so, due to the regularity obtained above,
Let us define the control-to-state operators S and :
where is the unique weak solution to (3.23)–(3.25) with initial data (and parameter ω) over , and
with φ the unique weak solution to (2.1)–(2.3) with initial data (and parameter ω) over .
The control problem
Existence of a minimizer
We aim to extend the minimization problem to a time-dependent cost function by adding a free terminal time that penalizes large processing time. Following [10], we work on the relaxed functional of (2.4), namely
There existsandsuch that:with.
The functional (4.1) is bounded from below and thus has a finite infimum. Let us consider a minimizing sequence with and and the corresponding solutions , (i.e. ) such that:
We have , so that a.e in . Since is a bounded sequence, then there exists a (non relabeled) subsequence which satisfies:
We also have
where is a weak solution to (2.1)–(2.3) and a.e in . By applying the dominated convergence theorem, we obtain
strongly in where .
Using the strong convergence of to in , we obtain, passing to the limit,
and
By passing to the limit in , and using the lower semi continuity of the norm we infer:
which implies that is a minimizer of (4.1). □
Linearized system
To establish the Fréchet differentiability of the solution operator with respect to the control ω, we first investigate the linearized state equations. For arbitrary but fixed , let . For , we consider the following linearized state equations
Letand.
Then for any, there exists a unique solutionof (
4.2
)–(
4.5
) with:satisfying, for all v in,
As for the state problem, the proof can be carried out via a Galerkin scheme. We only give here formal estimates.
first estimate: substituting in (4.6), in (4.7) and upon summing and integrating over , and by parts, we obtain:
Note that, owing to the regularity for (see Theorem 3.2)
and
Furthermore, we have
Then, using the above estimates, we get
Applying the integral form of Grönwall’s inequality we obtain, for ,
Second estimate: substituting in (4.7) we obtain:
and, in view of the regularity given in Theorem 3.2 we get
By the Poincaré inequality, we obtain
and thus,
Substituting in (4.6), in (4.7) and upon summing and integrating over , we obtain
Applying Hölder’s inequality and Young’s inequality and using (4.8), we observe that
and
To estimate the third term of (4.9) we must first obtain an estimate of . This is done by considering in (4.6) and by integrating over to obtain
Thus, we have
Returning to (4.9) and using the above estimates, we get
Applying the integral form of Grönwall’s inequality, we find that
Moreover, since , applying elliptic regularity to (4.7) and using (4.10) yields that
We deduce that is bounded in and is bounded in .
Uniqueness: Let and with , two solutions to the linearized system associated to the same data . Then it holds, for all
Substituting in (4.11) and in (4.12) and summing leads to
Integrating over for and using Grönwall’s lemma leads to
So we get hence the uniqueness. □
Let, and. We set,,and letbe the unique solution of the linearized system atassociated to h.
Then the remaindersandsatisfy:with. Moreover S is Fréchet-différentiable atand the Fréchet derivative with respect to the control ω, denoted, belongs toand satisfies
On account of (3.23)–(3.25) and (4.2)–(4.4), ρ and θ are solution to the following equations
Note that, since , we can write
with bounded.
Hence, , we have:
First estimate: We substitute in (4.15), in (4.16) and in (4.16) and sum the resulting equations. Taking into account the Lipschitz property of and using Hölder’s and Young’s inequalities, we obtain
Besides, we infer from standard interpolation inequality that
with on account of Theorem 3.1.
Hence we obtain
Integrating over , and using the continuous dependence estimate (3.19) leads to
Applying the Grönwall’s lemma, we obtain, for tending to 0
Second estimate: We rewrite the second equation of (4.14) in the following way
Hence, by Hölder’s inequality, (4.17) and (3.19), we infer
then we deduce that
By the continuous embedding we conclude
and consequently, we get (4.13). □
Adjoint system
We set
For any , let and let be the unique solution to the linearized system corresponding to h and the associated state variables . By Theorem 4.3, is Fréchet differentiable with respect to the control with
In order to eliminate the presence of the linear state variable from (4.19), we use the following adjoint system derived in the Appendix
whose well-posedness is stated below.
For any, there exists a uniqueassociated tosolution of (
4.20
)–(
4.23
) withsatisfyingfor a.e.andand.
We apply a Galerkin approximation and consider a basis of that is orthonormal in , and we look for functions of the form
which satisfy
. Substituting leads to
with
and we supplement the above equation with the condition: .
Note that the right-hand side of the equation depends continously on and , but due to the term , we cannot apply the Cauchy–Peano theorem directly. We first solve (4.28) on the interval , namely
for , which yields, by Cauchy–Peano theorem, the existence of and a local solution of the equation.
The a priori estimates derived below will allow us to deduce that can be extended to , that is, . We then extend the solution by solving (4.28) on the interval , i.e. we solve
with terminal condition at . The next estimate will allow to extend the solution to the interval .
First estimate: substituting in (4.26) and in (4.27), integrating over , for and summing leads to
with C, independent of n. Applying Grönwall’s lemma, we conclude
Second estimate: viewing (4.27) as the weak formulation of an elliptic problem for , and using the fact that is bounded uniformly in , we have by elliptic regularity that
with C independent of n.
Third estimate: integrating (4.26) over and integrating by parts, by Hölder’s inequality we obtain that
Thus:
Consequently we infer that
with C independent of n.
It follows from the a priori estimates that we obtain a relabelled subsequence such that
with solution of the adjoint problem (4.20)–(4.23).
Uniqueness: Let and with , two solutions to (4.20)–(4.23). Then it holds that
for all and , with .
Substituting in (4.29) and in (4.30) and summing leads to
Integrating over for and using Grönwall’s lemma yields
Thus , hence the uniqueness. □
Fréchet differentiability of the objective functional with respect to time
Here we assume that , and we extend to negative times using the initial conditions . For , we have the relation, for all
So, we can rewrite the objective functional as
Note that the first two terms are independent of τ, so that they will vanish when we compute the Fréchet derivative with respect to time. For any and , such that , we have
Therefore we infer
Then we deduce that the first order necessary optimality condition with respect to time
actually writes
with
Simplification of the first order necessary optimality condition for the control
Letbe a minimizer of the minimization problem with state variablesand associated adjoint variables.
Then, it holds that
For any , let and let be the solution of the linearized problem associated to h.
Then, the optimal control satisfies the following first order necessary optimality condition:
Substituting in (4.24) and in (4.25), integrating over leads to
Substituting in (4.6), in (4.7) and integrating over leads to
Using the facts that and , that and , we get that:
Comparing the above equation with (4.34), we obtain
Finally replacing the above equation in (4.31), we get
□
We could also have put the control function on J instead of κ, meaning this time that the treatment inhibits the lactate production in the tumor cells.
The equation then reads:
We can prove similar results, repeating the estimates made in the previous sections, with minor modifications. The linearized system now reads
while the adjoint system
Moreover the simplification of the first order necessary optimality condition for the control reads:
Numerical part
As far as the numerical simulations are concerned, we assume that the constant α and the potential f are fixed (we choose and ). On the contrary, we emphasize that κ, and J are patient-dependent parameters.
Moreover we postulate that κ and J are also tumor dependent (they increase with respect to the tumor), while does not depend on the tumor.
Identification of parameters
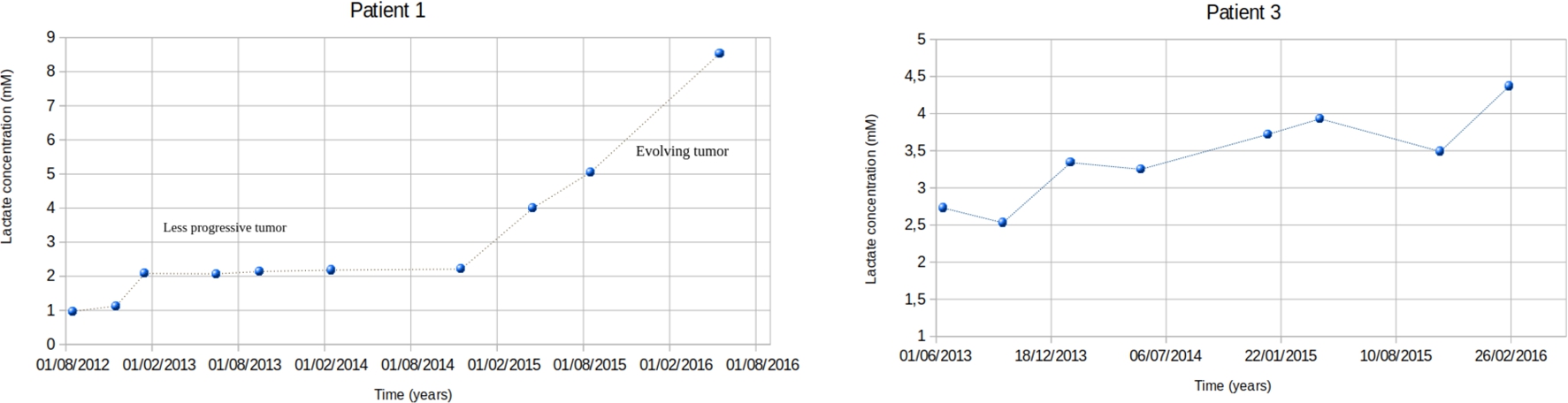
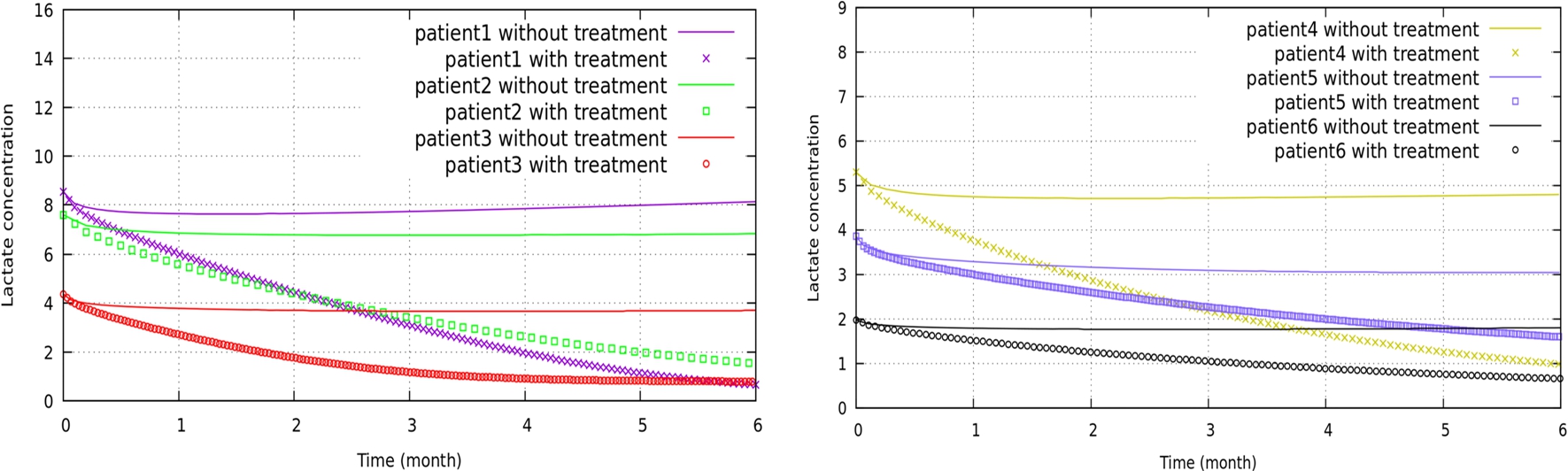
In this paragraph, our goal is to identify the parameters J, κ, of equation (5.2). To this end, we use six in vivo data, collected by Magnetic Resonance Imaging (MRI) at the University Hospital of Poitiers, and corresponding to six anonymous patients suffering from glioma. For instance, Fig. 1 displays the lactate trajectories over the years, for patient 1 and patient 3.
Since we only have global data, we first assume that the lactate concentration is spatially constant in the brain. Hence equation (2.1) (with ) reduces to
The identification is done using a descent algorithm based on (5.1) and its associated adjoint equation (see Section 5.2 for details).
Let us first focus on the parameters identification for patient 1. We can notice that the evolution of the lactates can be split into two phases: a first phase with almost constant lactates, corresponding to a slow tumor evolution and a second phase where the lactates evolve sharply, corresponding to a rapid tumor growth. Recalling that κ and J are tumor dependent, we proceed in the following way:
MRI data of glioma.
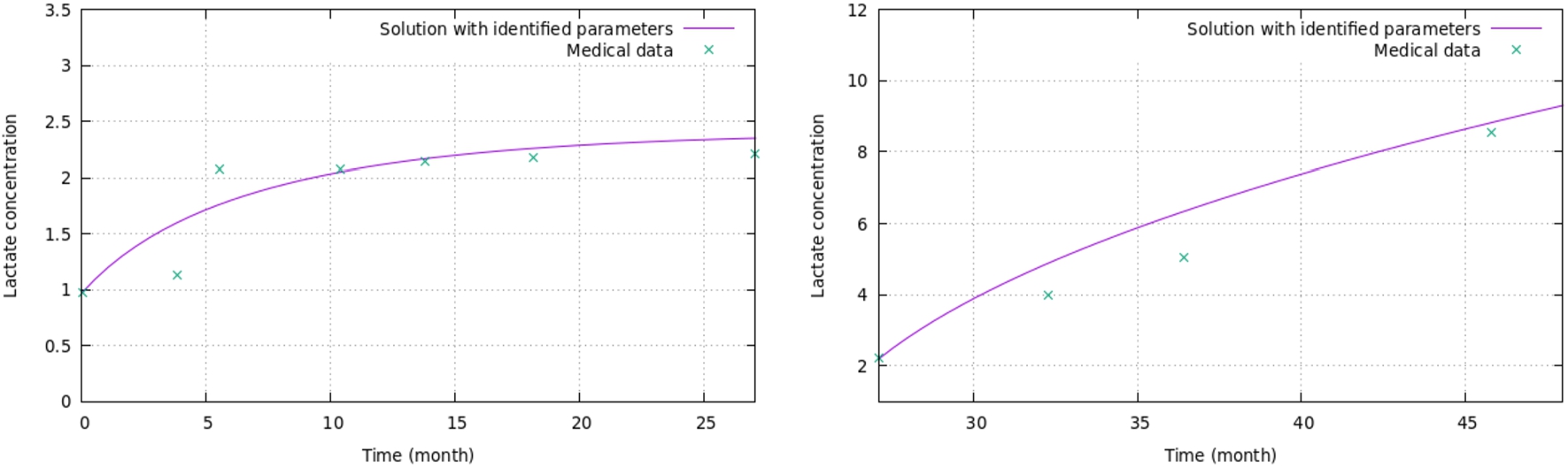
We identify κ, and J, using the data corresponding to the first phase (slow evolution). We obtain mM/month, mM/month and mM. Then, we keep mM and identify and , from the data of the second phase (see Fig. 2 and Table 1).
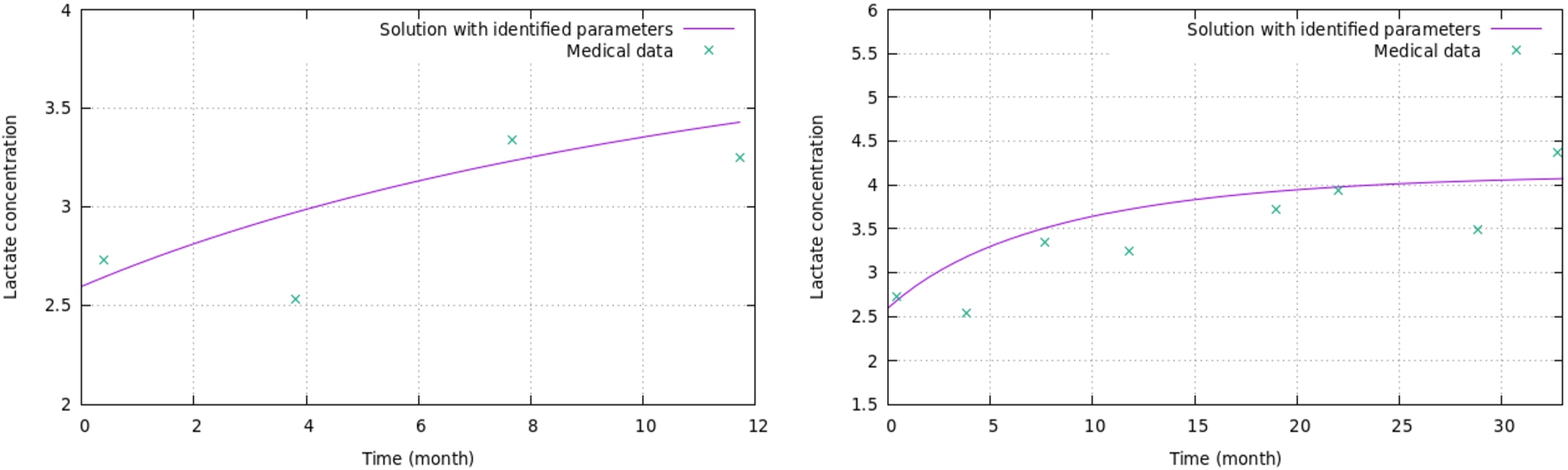
We proceed in a slightly different way for patients whose lactate trajectories can not be split into two phases (patient 3 for example). In this case we identify , and using the first points of the graph, then fix and identify and with the whole set of points (see Fig. 3). Table 1 displays the parameters , , , , for each of the six patients. Figure 2 and 3 display, for patients 1 and 3, the reconstructed lactate trajectories obtained thanks to the identified parameters.
Approximated lactate trajectory with identified parameters for patient 1. On the left, the phase with low variations. On the right the phase with larger variations.
Parameters values of each patient
Patient
()
()
()
()
()
1
0.726
1.122
2.05
2.097
1.31
2
0.5477
1.442
1.55
2.721
5.582
3
2.034
2.292
3.44
3.87
0.515
4
0.203
1.074
1.194
2.729
6.599
5
0.34
1.34
0.385
1.515
10.564
6
0.106
1.144
0.355
1.725
7.724
Approximated lactate trajectory with identified parameters for patient 3. On the left, the phase with low variations, on the right the whole lactate trajectory.
Treatment optimization
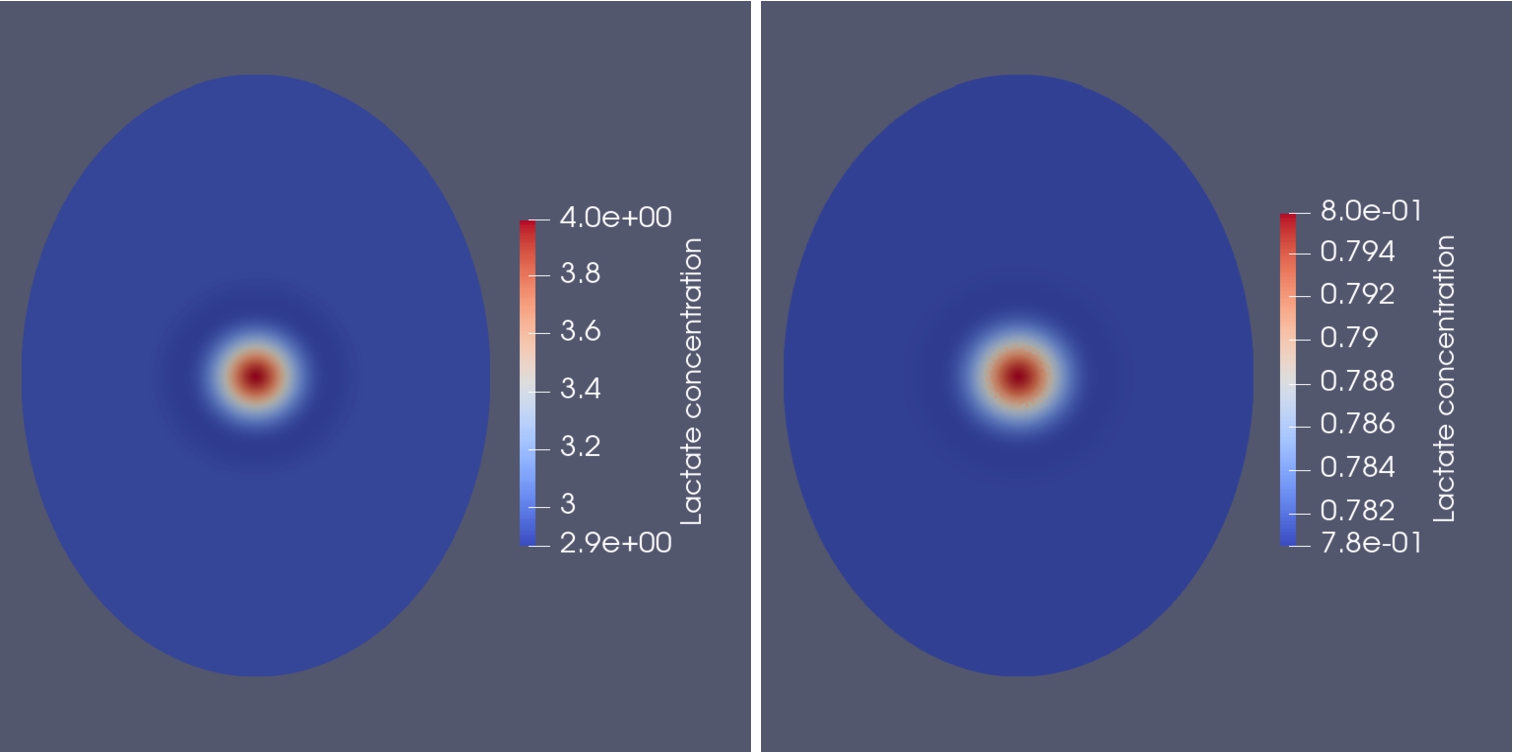
For the numerical simulations presented below, Ω is an ellipse parametrized by and , with representing the part of the brain surrounding the tumor. Inside the ellipse, the initial tumor area is delimited by a circle of radius . The target value of the lactate concentration is taken as mM everywhere in the brain, corresponding to normal levels of intracellular lactate concentration.
In this section the control parameter ω is associated with J, meaning that the treatment has an impact on the production and consumption of the lactates (see Remark 2). Then, the equation for lactate reads:
Here we assume that ω is constant (with respect to time and space) and that the duration of the treatment is fixed. Hence the functional reduces to:
For the simulations, we set months, mM , . The algorithm is summarized on Algorithm 1.
Descent optimization algorithm
We use a finite element method for the space discretization of equation (5.2) and its associated adjoint equation, and a Crank–Nicolson scheme for the time discretization.
For each patient, we choose the parameters , and computed in the previous paragraph and recapitulated in Table 1.
For all of them, we take mM outside the tumor area, which corresponds to a normal lactate concentration. Inside the tumor area, we take for the maximum lactate value reached by the patient before treatment. For instance, we take mM for patient 1 (see Fig. 1(a) at months). After computations, we get . For patient 3, we take mM (see Fig. 1(b) at months) and get . Table 2 shows the optimal dose of treatment and the value of after treatment for every patients. In most cases, this latter value which is expected to be closed to the “normal” value of J, is indeed smaller than .
Optimal treatment dose for all patients
Patient
optimal treatment
(1-) ()
()
1
0.804
0.4018
0.726
2
0.856
0.2232
0.5477
3
0.322
2.3323
2.034
4
0.867
0.1588
0.203
5
0.744
0.0985
0.34
6
0.828
0.0610
0.106
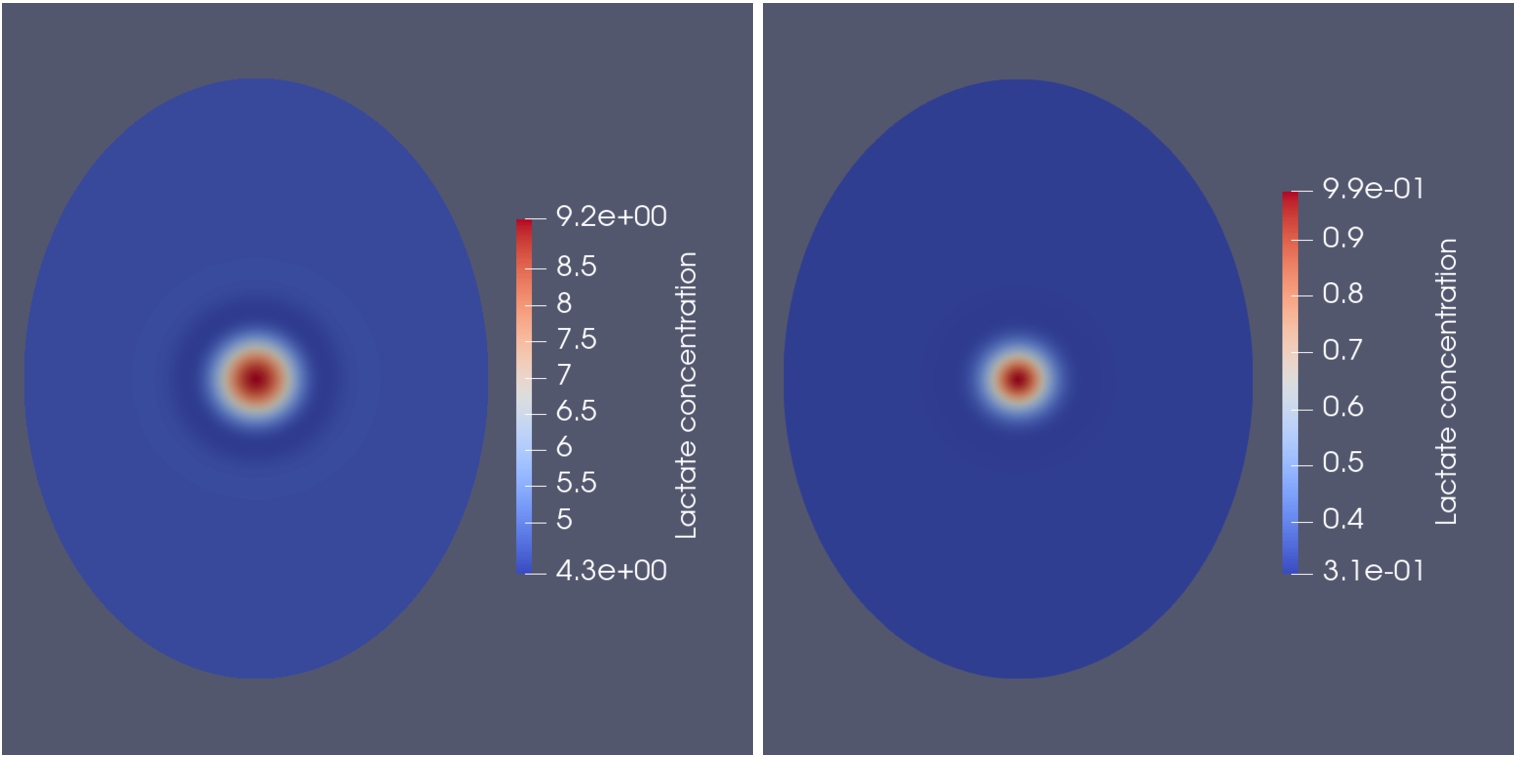
Figure 4 displays the final simulated lactate concentrations for patient 1, after 6 months, without treatment (left) and with the optimal treatment (right). Figure 5 displays the final lactate concentrations for patient 3, after 6 months, without treatment (left) and with the optimal treatment (right). These figures show that the treatment makes it possible to drastically reduce the concentration of lactate in the area of the tumor.
Spatial distribution of lactate levels at months for patient 1. On the left, the patient didn’t get treatment. On the right the patient has undergone the optimal treatment.
Spatial distribution of lactate levels at months for patient 3. On the left, the patient didn’t get treatment. On the right the patient has undergone the optimal treatment.
In Fig. 6 we compare, for every patient, the temporal evolution of their average values of lactate concentration in the tumor area, with and without treatment. The lactate levels stagnate without treatment, while, as expected, they decrease under the effect of the optimal treatment, until they reach (or get close to) the desired targets after six months.
Temporal evolution of lactate levels in the tumor area.
Footnotes
Derivation of the adjoint system
In order to derive the adjoint system, we apply the Lagrangian principle, defining the Lagrangian function with Lagrange multipliers ξ and π by:
The adjoint system is obtained by:
with
and
So the adjoint system reads
References
1.
H.Alsayed, H.Fakih, A.Miranville and A.Wehbe, On an optimal control problem describing lactate production inhibition, Applicable Analysis (2022). doi:10.1080/00036811.2021.1999418.
2.
H.Alsayed, H.Fakih, A.Miranville and A.Wehbe, On an optimal control problem describing lactate transport inhibition, 2022, HAL-03850509.
3.
A.Aubert, R.Costalat, P.J.Magistretti and L.Pellerin, Brain lactate kinetics: Modeling evidence for neuronal lactate uptake upon activation, Proceedings of the National Academy of Sciences of the United States of America102 (2005), 16448–16453. doi:10.1073/pnas.0505427102.
4.
F.Bonnans, J.-C.Gilbert, C.Lemaréchal and C.Sagastizábal, Optimisation Numérique: Aspects théoriques et pratiques (Mathématiques et Applications), Springer, 1997.
5.
L.Cherfils, S.Gatti, C.Guillevin, A.Miranville and R.Guillevin, On a tumor growth model with brain lactate kinetics, Mathematical Medecine and Biology39(4) (2022), 382–409. doi:10.1093/imammb/dqac010.
6.
L.Cherfils, S.Gatti, A.Miranville and R.Guillevin, Analysis of a model for tumor growth and lactate exchanges in a glioma, DCDS-S14(8) (2021), 2729–2749. doi:10.3934/dcdss.2020457.
7.
M.Cloutier, F.B.Bolger, J.P.Lowry and P.Wellstead, An integrative dynamic model of brain energy metabolism using in vivo neurochemical measurements, Journal of Computational Neuroscience27 (2009), 391–414.
8.
P.Colli, H.Gomez, G.Lorenzi, G.Marinoschi, A.Reali and E.Rocca, Optimal control of cytotoxic and antiangiogenic therapies on prostate cancer growth, Maths. Models Method Appl. Sci.31(7) (2021), 1419–1468. doi:10.1142/S0218202521500299.
9.
M.Conti, S.Gatti and A.Miranville, Mathematical analysis of a phase-field model of brain cancers with chemotherapy and antiangiogenic therapy effects, AIMS Mathematics7(1) (2022), 1536–1561. doi:10.3934/math.2022090.
10.
H.Garcke, K.F.Lam and E.Rocca, Optimal control of treatment time in a diffuse interface model of tumor growth, Appl Math Optim78 (2018), 495–544.
11.
C.E.Griguer, C.R.Oliva and G.Y.Gillespie, Glucose metabolism heterogeneity in human and mouse malignant glioma cell lines, Journal of Neuro-oncology74 (2005), 123–133. doi:10.1007/s11060-004-6404-6.
12.
C.Guillevin, R.Guillevin, A.Miranville and A.Perillat-Mercerot, Analysis of a mathematical model for brain lactate kinetics, Mathematical Biosciences and Engineering15(5) (2018), 1225–1242. doi:10.3934/mbe.2018056.
13.
R.Guillevin, C.Menuel, J.-N.Vallée, J.-P.Françoise, L.Capelle, C.Habas, G.De Marco, J.Chiras and R.Costalat, Mathematical modeling of energy metabolism and hemodynamics of WHO grade II gliomas using in vivo MR data, Comptes rendus biologies334 (2011), 31–38.
14.
P.Jacquet and A.Stéphanou, Metabolic reprogramming, questioning, and implications for cancer, Biology10 (2021), 129. doi:10.3390/biology10020129.
15.
M.Lahutte-Auboin, R.Costalat, J.-P.Françoise and R.Guillevin, Dip and Buffering in a fast-slow system associated to Brain Lactacte Kinetics, preprint, arXiv:1308.0486.
16.
M.Lahutte-Auboin, R.Guillevin, J.-P.Françoise, J.-N.Vallée and R.Costalat, On a minimal model for hemodynamics and metabolism of lactate: Application to low grade glioma and therapeutic strategies, Acta Biotheoretica61 (2013), 79–89.
17.
L.Li, A.Miranville and R.Guillevin, Cahn–Hilliard models for glial cells, Appl Math Optim84 (2021), 1821–1842.
18.
P.J.Magistretti and I.Allaman, A cellular perspective on brain energy metabolism and functional imaging, Neuron86 (2015), 883–901. doi:10.1016/j.neuron.2015.03.035.
19.
S.Mangia, G.Garreffa, M.Bianciardi, F.Giove, F.Di Salle and B.Maraviglia, The aerobic brain: Lactate decrease at the onset of neural activity, Neuroscience118 (2003), 7–10. doi:10.1016/S0306-4522(02)00792-3.
20.
J.R.Mangiardi and P.Yodice, Metabolism of the malignant astrocytoma, Neurosurgery26 (1990), 1–19. doi:10.1227/00006123-199001000-00001.
21.
A.Miranville, The Cahn-Hilliard Equation: Recent Advances and Applications, Society for Industrial and Applied Mathematics, 2019.
22.
A.Signori, Optimal distributed control of an extended model of tumor growth with logarithmic potential, Appl Math Optim82 (2020), 517–549. doi:10.1007/s00245-018-9538-1.
23.
A.Signori, Penalisation of Long Treatment Time and Optimal Control of a Tumour Growth Model of Cahn–Hilliard Type with Singular Potential, 23 May 2020, arXiv:1906.03460v2 [math.AP].
24.
P.Sonveauxet al., Targeting lactate-fueled respiration selectively kills hypoxic tumor cells in mice, J. Clim. Invest.118(12) (2008), 3930–3942.