We study the inverse problem of recovery a nonlinearity , which is compactly supported in x, in the semilinear wave equation . We probe the medium with either complex or real-valued harmonic waves of wavelength and amplitude . They propagate in a regime where the nonlinearity affects the subprincipal but not the principal term, except for the zeroth harmonics. We measure the transmitted wave when it exits . We show that one can recover when it is an odd function of u, and we can recover when . This is done in an explicit way as .
Introduction
Consider the semilinear wave equation
We assume that f is smooth and compactly supported in the x variable.
The problem we study is whether we can recover for all x and u from remote measurements. We show that this can be done in an explicit way when f is an odd function of u, which covers the case
studied extensively in the literature. Without that assumption, we show that we can recover explicitly when , with m (an even) integer. We probe the nonlinearity with high-frequency incident waves of wavelength , , and look at the asymptotic expansion of the wave at some exit time as . We take both complex and real incident waves. The real case is harder and perhaps more relevant for applications. While solvability with not necessarily small initial conditions is not guaranteed unless we make additional assumptions on f, we show that (1.1) is solvable for with the waves we use the probe the medium.
In the works on inverse problems for non-linear hyperbolic PDEs so far, it is usually assumed that u is small: one takes an asymptotic expansion of a solution with initial conditions chosen so that their weak singularities collide at a chosen point at a chosen time. Then one takes the limit as all ε’s tend to zero. The information about the nonlinearity is extracted from the term in the asymptotic expansion, which has a certain weak singularity; this method is sometimes called higher order linearization. This can and does provide information about the Taylor expansion of w.r.t. u at only, see [25]. In [29], one has three waves instead of four. An exception is the work [1], where g is x-independent (and the nonlinearity is critical, , ); then f is a similar perturbation of a fixed non-zero solution rather than a perturbation of the zero one. Recently in [31], the authors studied a cubic nonlinearity and proposed using non-small solutions producing an exit signal of magnitude comparable to the one of the incident field. The solution then is , and propagates in the weakly nonlinear regime. We showed that the propagating wave has a phase shift in the principal term which is proportional to the X-ray transform of α along the characteristic rays; then one can recover α from that information. The method in [31] can be extended to having that type of cubic asymptotic behavior as . Aside from those two extremes, or , the inverse problem remained open to author’s best knowledge, see also Section 8.
As we emphasized above, methods based on asymptotically small solutions can only recover the nonlinearity at , and possibly its Taylor expansion there, see for example [12,13,23–25,35]. Moreover, they propagate essentially linearly, where the nonlinearity is negligible. To recover the nonlinearity away from , we need non-small solutions; and we need a problem allowing such solutions. The main idea of this work is to use high frequency solutions (in the norm). Assume that f is t-independent for now. Then we drop the dependence on t and simply write , . When f is an odd function of u as in (1.2), that would put us in the principally linear geometric optics regime (see [26] and Section 8) and the nonlinearity would affect the sub-principal term. The general case is more delicate and does affect the principal term. If the principal part is , with , and , then its modulus is , and in the PDE, we would have modulo . So the nonlinearity would act effectively as a time-dependent potential , which is independent of time along the light rays parallel to . It can be recovered from near-field scattering data by means of its X-ray transform. In other words, once we justify that claim, we get essentially an inverse problem for the linear wave equation , which is well studied. Note that this is not a linearization. The X-ray transform of V is contained in the subprincipal term of the exit wave. Thus we can recover for every p in the range of .
Assume we have real incident fields like ; then the situation is quite different. This is a solution of the free (linear) wave equation, and would be the principal part of the non-linear solution when f is of the type (1.2). Its square is not anymore. The “effective potential” would be highly oscillatory, and we need to expand it (multiplied by u) in Fourier modes first. This leads to expanding the function in Chebyshev polynomials over the interval , see (1.8) below. Then we show that the wave develops (odd) harmonics and each one has an amplitude proportional to the X-ray transform of the corresponding Chebyshev coefficient. This allows us to recover those coefficients and ultimately, g. We also show that the first harmonic only is enough: it leads to an Abel equation, see (3.15), allowing us to recover g.
The case of general f not necessarily an odd function of u is more delicate. We study real incident waves only. Then the self-interaction of the wave creates a zeroth harmonic , which is known in the physics literature as rectification. Then affects the principal symbol, in fact, and its principal part solves another semi-linear wave equation with a nonlinearity depending on f, see (4.13). The zeroth harmonic mixes (interacts) with the non-zero ones and affects all the frequencies of the exit signal. For this reason, it is not clear how to extract information about f from them. When f is a polynomial in u, with x dependent coefficients, the highest harmonic does not depend on , and we can actually recover the principal term of that polynomial; in particular, we can recover when .
We refer to Section 8 for a further discussion of relevant works on inverse problems for semi-linear hyperbolic PDEs and non-linear geometric optics.
Setup and main results. We assume is independent of t at the beginning which allows us for a simpler exposition. We explain the modifications needed to cover the general case in Section 5.
We describe our setup now. Assume . We take or . We are probing the medium with
Assume and let be such that . We solve (1.1) with initial condition
which solves the free wave equation for such t. We measure
where is fixed and u is the unique bounded solution.
Our first main theorem is the following.
Let the complexbe as in (
1.3
), and let. Assume thatis of the form (
1.2
) forwith g smooth. Then, for, there is a unique bounded solution to (
1.1
), (
1.4
) defined for. Moreover,
in the uniform norm.
For every fixed, the second term in the asymptotic expansion ofasrecovers the X-ray transform ofat the direction ω, for every.
, known for all unit ω, all, recoversuniquely for all x and.
Rescaling χ allows us to recover g for all x, p if f is of the type (1.2) for all u.
We turn our attention now to the recovery of f with a real-valued incident wave in (1.4)
which is just the real part of (1.3), modeling problems where u must be real. Then the solution will stay real. Consider the odd case (1.2) first, then . The incident wave is a linear combination of waves with , and plugging this in the nonlinearity would create higher order odd only harmonics. To compute them, we expand the principal part of the non-linear term into Fourier cosine series in the variable, see (3.3) below. This leads naturally to an expansion of into Chebyshev polynomials over with Chebyshev coefficients
where are the Chebyshev polynomials of first kind, and for m even. Here M is a parameter which will eventually be replaced by .
Let f be odd foras in Theorem
1.1
. Let the realbe as in (
1.7
). Then, for, there is a unique bounded solution to (
1.1
) with initial condition (
1.7
) for, defined for. Moreover,
in the uniform norm, where
The nonlinearityis uniquely determined by the second term above in the asymptotic expansion ofas, for all x and.
To prove the theorem, we show that one can recover first. Those functions look like the Fourier sine coefficients of the second term in the variable but they depend on as well, through . That additional dependence is “slow”, which allows for the separation. Then we can invert the X-ray transform to get , and therefore g. Note that can be fixed here. We also show that we can recover g from alone by solving an Abel equation; then we need all , see (3.16). Details are given in Section 3. In particular, it is shown there that all steps in the recovery are explicit.
Finally, when f is not necessarily even in u, the geometric optics construction still works, see Section 4.2 but we get zeroth harmonics. The zeroth harmonic however solves a semilinear equation of the same type, and requires to assume smallness of χ controlling the size of the initial condition. We do this explicitly for a quadratic nonlinearity , and show that one can recover α in an explicit way. We discuss the general case in Section 4, and show that once we can solve the zeroth harmonic PDE, one can recover the leading term in the nonlinearity if the latter is polynomial in u. The reconstruction is explicit again and it uses the highest harmonic in the subprincipal term which is not affected by the zeroth one.
Uniqueness in the case , and stability (for specific small incident waves) was proven in [23] using the higher order linearization method. The analysis there, as explained earlier, is based on the asymptotic behavior of the nonlinearity as .
The results here can be extended in several directions; we chose not to do so in order to keep the exposition more transparent. One can involve a Riemannian metric, and one can localize the probing waves on the plane as in [5]. We refer to Section 7 for a discussion.
The structure of the paper is as follows. The odd case with a complex incident wave is studied in Section 2, where we prove Theorem 1.1. The odd case with a real incident wave and the related geometric optics construction are considered in Section 3, where we prove Theorem 1.2. Section 4 is devoted to the case of general f. Numerical examples are presented in Section 6, some further remarks can be found in Section 7, and a discussion – in Section 8. In the appendix, we review some known and prove some new results about the solvability of (1.1).
Odd nonlinearities. A complex monochromatic incident wave
We assume first odd as in (1.2) and the incident wave complex as in (1.3).
Geometric optics
Let u be as in Theorem 1.1. We prove first the following.
Under the assumptions of Theorem
1.1
, there is unique bounded solution forwhen. Moreover,uniformly in t and x.
As before, we are looking for an asymptotic solution of (1.1) of the form
with , , and a having some asymptotic expansion in powers of h: with independent of h. Plug (2.2) into (1.1) to get
where is the non-linear operator on the l.h.s. of (1.1).
We are in the linear regime now. The highest order term gives us the eikonal equation
The order term gives us the well-known first transport equation, the same as in the linear case:
The second transport equation is affected by the nonlinearity:
Note that here we used the expansion .
Now, with the linear phase , the first transport equation takes the form
Recall that we have the incoming wave (1.3). In time-space, for a fixed ω, introduce the variables
Then , and . The first transport equation with its initial condition takes the form
Therefore,
The second transport equation (2.6) takes the form
Note that this would have been the transport equation if we had a time dependent potential (depending on the incident direction ω as well)
The solution of (2.11) is
If we restrict this to , corresponding to , we get the effective potential , as explained in the introduction. Pass to the variables to get (2.1).
Let . Then solves
see (2.3). By (1.2), we can write this as
so we get in but each derivative of the r.h.s. multiplies this by . By the estimates in Theorem A.3, we get in the energy norm, which is not sufficient. Following [31], we continue the construction to a higher order. Expanding the nonlinearity in Taylor series in h, and at each step, we solve linear ODEs. Thus for every , we have having an expansion similar to (2.1) with a remainder satisfying
Moreover, for for every fixed and C depending on f and χ. Given , we can choose so that , where . Take κ in (A.5) so that in a neighborhood of and in a slightly larger one. Then solves (2.13) with f replaced by its cut-off version as in (A.5). By Theorem A.2, there exists a unique u solving (1.1) with f replaced by its cutoff version. Choose in (2.13) to get in , uniformly in t, by Theorem A.3. Then by the trace theorem, this is also true in the uniform norm since . In particular, this shows that has the same upper bound up to ; therefore, we can remove the cut-off to get that u actually solves (1.1). By Theorem A.1, this solution u is unique among all bounded solutions for . □
The statement of the proposition holds for with depending on χ and on f but uniform in ω. For the purpose of the unique recovery statements in the main theorems, one can take and ; apply the expansion with the smallest of the two ’s, and then prove .
We should also remark here that [10] and [30, Theorem 8.3.1] show that, for semilinear systems of order one, at least, once one finds an approximate oscillatory solution as above, up to order , then there exists an exact solution u which is and such that .
The existence and the uniqueness statement and part (a) follow from Proposition 2.1.
Fixing , we recover the X-ray transform of at the direction ω. Indeed, writing , , we get
When , we have , so when we fix , we have and the formula above is the X-ray transform of for such τ. Varying τ, runs over the range of which is . This proves (b). Part (c) follows immediately. □
Odd nonlinearities. A real incident monochromatic wave
We assume odd as in (1.2) and the incident wave real as in (1.7).
Heuristic arguments
We would expect , , i.e., the principal term in the expansion of u to be unaffected by the nonlinearity but that would change in next section. Plugging this into yields the formal potential
(up to an remainder), which oscillates highly, therefore the method we used before needs modifications. The nonlinearity then takes the form
modulo . We think of ϕ in as a second copy of ϕ, independent of the one in the term. Set . We may want to use the formula . Then . Let us expand the periodic, even function (note that we removed the factor M) into a Fourier cosine series
(we will see that in a moment and that m must be odd), where
Perform the change of variables to get formula (1.8) stated in the Introduction. Knowing , we can recover for by
The nonlinearity takes the form
modulo .
Geometric optics in the principally linear, subprincipally nonlinear regime
Assume
compare with (2.2), where each has an expansion . Since we want u to stay real, we require . Using (2.3), we see that we can take the phase ϕ satisfying the same eikonal equation (2.4); and we take the phase because this is what is dictated by the initial condition (1.7). Plug (3.7) into the equivalent of (2.3) (no absolute value in there) to get
Expand g into a Taylor series in its second variable to get that the second term above multiplied by h equals
The first transport equations, see also (2.9), says that stay constant along the rays, therefore, by (1.7),
in the variables (2.8), and all other coefficients vanish. In particular, this means that in (3.9), only, same for k there. Then (3.9) takes the form
which is just , see (3.2), as expected. We expanded this into Fourier cosine series in (3.6). This, together with (3.8), shows that the second transport equations take the form
with the Chebyshev coefficients given by (1.8). Therefore,
compare with (2.12). The coefficients are rapidly converging, locally uniformly with respect of its variables, which makes it easy to prove convergence in (3.13). The construction can be continued up to any finite order with a justification of the expansion as in the previous section.
This proves the following.
Under the assumptions of Theorem
1.2
, for, there is unique bounded solution u defined for. Moreover,uniformly, where the Chebyshev coefficients of the nonlinearity are given by (
1.8
).
Proposition 3.1 proves (1.9), which is part (a) of Theorem 1.2. It is convenient to set
where , . Then
with
Given for , we know the subprincipal term above. That term looks like a Fourier sine series in the variable with Fourier coefficients but depend on as well. On the other hand, they do not oscillate fast with h, so in any interval of length is constant up to . Therefore, we can compute the Fourier coefficients for in any fixed interval with length the period as if did not depend on , up to . This shows that we can recover .
We have recovered the X-ray transform of in the direction ω. Now we vary ω and take measurements at x with unchanged (we can think of it as rotating the setup). Then we recover the Chebyshev coefficients for every . Varying x in the strip allows us to recover for every with as before. Then we can recover for , see (3.3).
One downside of this is that to recover all coefficients, we need measurements at increasing frequencies , . If we are limited in that, we can recover some finite Fourier expansion only. When we do numerical simulations, higher k means even smaller step sizes if we use finite differences.
There is an alternative way, however. We can recover the first Chebyshev coefficient only. By (1.8), we know
This is an Abel equation with an explicit unique solution [8, p. 24]
To compensate for noise, in order to extract the Fourier coefficients in (3.18), we may want to integrate over a larger interval of “small” length but independent of h. Next, division by χ is not really needed before integration. Based on that, we propose the following scheme. Denote by the principal term above. Note that this is exactly the (linear) solution if there were no nonlinearity, i.e., when . Compute (denoting )
where . In other words, we multiply the difference by , the variable σ would control the shift; and then, and then we project on a sine Fourier mode.
By (3.17),
Set for a moment, suppressing the other variables. Use the formula to get
since the only non contribution comes from . Indeed, by (3.4), independently of k. Then , , independently of k. Then
We have for . Therefore, the sum above can be estimated by for .
We proved the following.
Withdefined by (
3.17
), we haveIn particular, choosing a sequence of ψ converging to the Dirac δ, we can recoverfor every σ, ω and.
Therefore, we can recover the convolution of with arbitrary test functions. In particular, we can recover (think of σ as ) as long as but the latter is guaranteed when does not vanish, by (1.10). The convenience of (3.19) is that it allows us to recover a convolved (a regularized) version of the latter directly from possibly noisy data.
To recover we had to take two limits: first , and next, in . In applications, we would like to take and get up to a small error. One can set with in (3.17). Then would be equal to (3.20) directly plus as , and one can be more specific about the error.
Recovery algorithms
We deduced two recovery algorithms.
Recovery using all harmonics
Fix χ and recover for , by Proposition 3.2, and all x, ω.
Invert the X-ray transform for every fixed, see (3.14), to recover for every x and for every , .
To recover for p on a larger interval, we choose another χ, for example we replace the original one by a scaled version .
This requires measurements or numerical experiments for increasing frequencies , . Note that we actually need one value of M to recover g for p in a fixed interval; in fact choosing is enough. This corresponds to making measurements at a fixed which maximizes .
Invert the X-ray transform for every fixed, see (3.14), to recover for every x and for every , .
Solve the Abel equation (3.15) to recover by (3.16) for every x and every .
To recover for p on a larger interval, we choose another χ, for example we replace the original one by a scaled version .
Now, we use all in the data but the first harmonic is enough.
The polynomial (cubic) case
As a special case, we show how our approach works when (and u is real-valued), i.e., when . The construction works in the same way for , integer. This is the case considered in [31] but there we used weakly non-linear solutions with amplitudes . The nonlinearity there affects the principal term and creates phase shifts.
Then, see (3.3),
which leads to the effective potential, compare to (3.1),
Therefore, after multiplying by u, we get first and third harmonics only in this case. Indeed,
see also (3.3), therefore, , , all other vanish.
This leads to an ansatz of the type (3.7) with having non-zero entries for only:
The term would have harmonics , etc. As before, the principal terms is unaffected by the nonlinearity, so we still have (3.10), therefore the principal part is in the coordinates (2.8). Then, as in (3.21),
which has Fourier coefficients all multiplied by with M as above. They can be written as .
By (3.8), the second transport equations are
The zero initial conditions imply
We compare this with (3.12). We have
Multiply this by and integrate in σ to get
also, , , as expected. This confirms (3.23).
The subprincipal term in the expansion (1.9) of u therefore is
The Abel equation (3.15) involving takes the form
and a direct computation yields , as we found out earlier. The recovery formula (3.16) takes the form
Set in the integral to transform the right-hand side to get
which confirms (3.25).
Not necessarily odd nonlinearities
Assume now that the nonlinearity is , not necessarily odd in u.
Some heuristic arguments can convince us that we cannot expect the zeroth harmonic to affect the subprincipal (and lower) terms only. If we follow (3.8), we would see that when , we are missing the first transport equation for the zeroth harmonic leading term because that equation would be multiplied by . Similarly, in (3.11), the derivative cancels when , etc. For this reason, we will seek a zeroth harmonic contribution to the principal term.
A quadratic nonlinearity
We start with the example which is interesting on its own. Note that global solvability is not guaranteed and probably not even true. On the other hand, solutions of the type we need do exist, as it follows form our analysis. Assume the real incident wave (1.7) as before. We will look for a solution of the form
where the zeroth harmonic is ; a more consistent notation would be . We presume that the harmonics would be the same as those of , and in fact we get that directly from the leading transport equations for . Plugging this into the quadratic nonlinearity, we get a principal part
The zeroth harmonic is
Plugging this in (1.1) and isolating the zeroth harmonics in the principal term, we can expect the principal part of the zeroth harmonic to solve
For any , this equation has a unique solution , provided , , which we assume from now on. One way to guarantee that is to fix some χ and replace it by , . For the convenience of the reader, we give a proof of this result in Theorem A.5 in appendix x, but one could also arrive at the same result by for example inspecting the proof of [14, Theorem 6.4.11].
Next we determine for . The transport equation for is
In order to obtain it, we had to select the harmonic in (4.2) to put on the r.h.s. Since is already determined, we can integrate it along the characteristic to get . Then is just its conjugate. In particular, the factor shows that the first harmonic in the subprincipal term has a sine term. For , we get similarly
The solution is
compare with (3.12). In the variables, see (2.8), we get
and in particular,
for x as in (1.5). Therefore, this term recovers the X-ray transform of α.
To get the equation for (the second order term of the zeroth harmonic), we need to compute the non-oscillating terms in the term of the nonlinearity, i.e., of twice the product of the and the term in (4.1). They can be obtained by combining and in each term; or with , respectively and . Since , we get
therefore .
One can compute a full asymptotic expansion that way. The next order term will have harmonics , etc. We proved (the justification is as in the odd case) the following.
When, supported in, the unique bounded solution towith initial condition (
1.7
) satisfies
Consider the inverse problem for (4.9) now: recovering α from . The principal term in (4.10), at and x as in (1.5), carries information about α in the zeroth harmonic . The latter solves the non-linear wave equation (4.4) however, so recovery of α from it seems not easier than the original problem. Also, since is smooth, no additional parameter, it would carry no meaningful resolution about α anyway. We look at the two oscillatory terms next. The amplitude of the first harmonic solves (4.5) which depends on along the characteristic, which we do not know. The amplitude of the second harmonic however is given by (4.7), which recovers explicitly. The next question is whether we can recover from (4.10). This can be done as in Proposition 3.2 since the contribution from the zeroth harmonics to in (3.17) would contribute an term to its asymptotic. We provide more details below.
In other words, the inverse problem in this case is solvable in an explicit way as well.
General non-odd nonlinearities
When we plug into the nonlinearity, we get . Following the special case above, we expect the following Fourier coefficients to play a role:
where we will eventually set as done earlier. The zeroth coefficient would be responsible for the leading term of the zeroth harmonic. When , for example, we get , see (4.3). We are looking for u having an asymptotic expansion
Then must solve
In general, when ; and in fact, this is true if and only if g is odd in the u variable for . Then, by uniqueness, we would get in (4.13), which is what we got in the odd case. Equation (4.13) is solvable when by Theorem A.5.
The equivalent of (4.2) without the zeroth order term now is
Plugging (4.12) into the PDE (1.1), and arguing as in (3.8), we see first that (4.13) is justified; and
The equation for the subprincipal term of the zeroth mode looks similar to (4.8) with coefficients obtained by averaging the term of the Taylor expansion of with the dot there replaced by (4.12). The construction can be extended to higher order and justified as done earlier, assuming that (4.13) is solvable.
The inverse problem
The appearance of the zeroth modes complicates the inverse problem. They depends on the nonlinearity in an implicit non-linear way. One special case when we can recover the nonlinearity is when it is of the kind with integer, inspired by the quadratic case in Section 4.1.
We show first that the coefficients in (4.12) are recoverable from the data.
Fordefined in (
3.17
), we haveIn particular, choosing a sequence of ψ converging to the Dirac δ, we can recoverfor every σ, ω and.
The proof is as that in Proposition 3.2. What is new here is that we have zeroth modes but they would give us an contribution. □
We therefore get the following.
Letfor,. Then, if, there is a unique bounded solution of (
1.1
) for, with a real initial condition (
1.7
) for, defined for. Moreover,, as, recoversuniquely. In particular,is recovered uniquely.
In this case, which can be seen easily by expanding by the binomial theorem, and then in Fourier series. Indeed, the highest power of would be . Then for ; therefore we can recover by Proposition 4.2, and then . □
Time-dependent nonlinearities
We will explain now how to extend the results so far to time-dependent . To probe time-dependent coefficients, we need to introduce a time delay parameter, call it . Then the phase function will be replaced by . We introduce this parameter in the probing waves (1.3) and (1.7). The initial condition (1.4) will then be replaced by
with the upper index either or , and we restrict to a finite interval . The r.h.s. of the inequality for t in (5.1) is chosen so that when it turns into an equality, the front of the wave just enters the ball . The solution u would depend on as well. We measure
with as in (1.5). With the nonlinearity non-present, we would get with x restricted as above.
The geometric optics construction goes along similar lines. The leading amplitude in (2.10) has the form again (with our shifted ϕ now). The second transport equation (2.6) is formally the same but g depends on t now. The equivalent of (1.6) takes the form
Similarly to the proof of Theorem 1.1, we can recover the light ray transform of for , over the light rays , , and x as in (5.2). By [34], this recovers , ·, uniquely along those lines. Note that the proof in [34] relies on analytic microlocal arguments, and the recovery is not stable since the light ray transform cannot recover timelike singularities. In particular, is uniquely recovered in the cylinder
The analysis of the real valued solutions in Section 3 generalizes in a similar way. The coefficients in (1.8) depend on t now: . Theorem 1.2 holds with obvious modifications similar to the ones above; in (5.5) we get
We get uniqueness similar to the one above, and in particular, in the cylinder (5.4). Both algorithms described in Section 3.4 work with obvious modifications.
Finally, we note that the coefficient in Theorem 4.1 could depend on t as well; then we can recover in the cylinder (5.4) (and as noted above, we have uniqueness in a larger set, per [34]).
Numerical examples
In the examples below, we work in the square discretized to nodes with N at least , with . Then the wavelength is which is about 15.7 times larger than the step size. We also take and even when capturing higher order harmonics is essential. We use a finite difference solver to compute the solution of (1.1) numerically. The terminal time is .
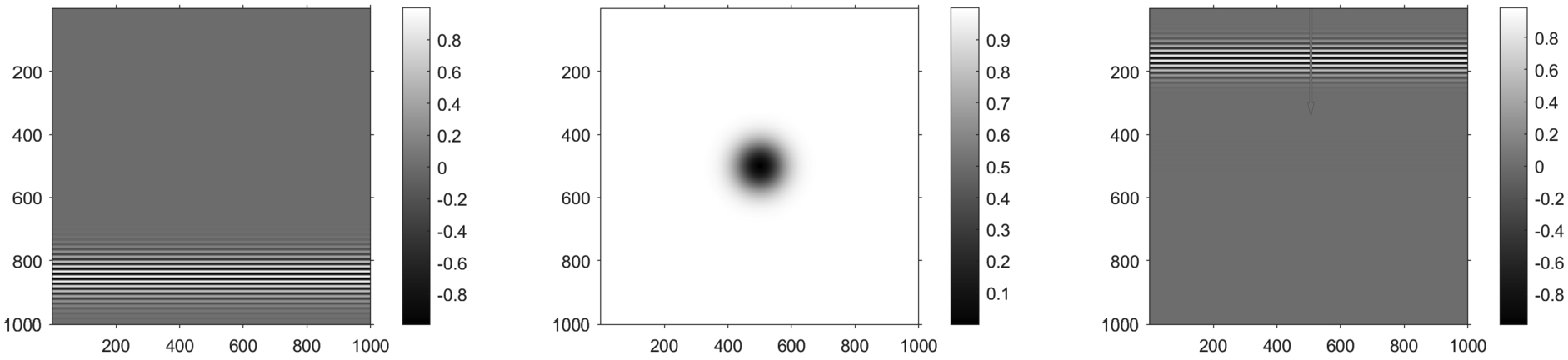
Figure 1 illustrates the setup. The probing wave (or its real part if we take its complex version ) at is plotted on the left, and the Cauchy condition for its t-derivative is chosen so that it would propagate up. We take nonlinearities of the type (this particular form is not essential for the computations) with α a Gaussian plotted in the middle of the figure. Finally, the plot on the right is that of (or its real part), i.e., the solution at . Since the effect of the nonlinearity is in the subprincipal term, it has no visible effect on that plot. Instead, in some of the figures below, we plot , where is the linear solution; i.e., we subtract the principal term. Then we plot a vertical cross-section of through the center in the direction shown: from top to bottom. We plot the top (approximately) of the cross-section, where is essentially supported.
The setup. All plots are of the real parts. Left: the initial condition. Center: the nonlinearity . Right: the solution at .
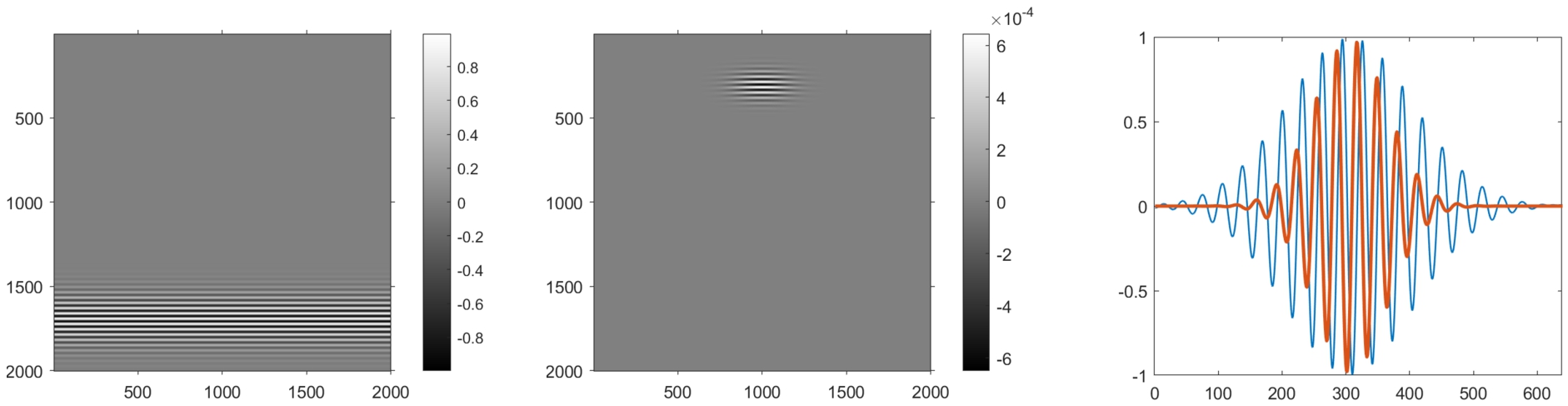
We take the nonlinearity to be as in Section 3.5. The subprincipal term in (1.6) then is
, , complex . All plots are of the real parts. Left: the initial condition. Center: the subprincipal term at . Right: plot of a vertical cross section of the subprincipal term through the center (in red) and that of the linear solution (in blue).
In Fig. 2, we plot the real parts of the subprincipal term (in red) vs. the principal one; with the subprincipal term rescaled to have the same maximal amplitude, i.e., divided by . We see that the subprincipal term decays faster away from the center because it has as an envelope of the oscillations instead of χ. The two oscillations are shifted by which is due to the factor.
More general nonlinearities with separated variables, complex incident wave
Assume . Then (1.6) takes the form
The envelope of the oscillations then is proportional to .
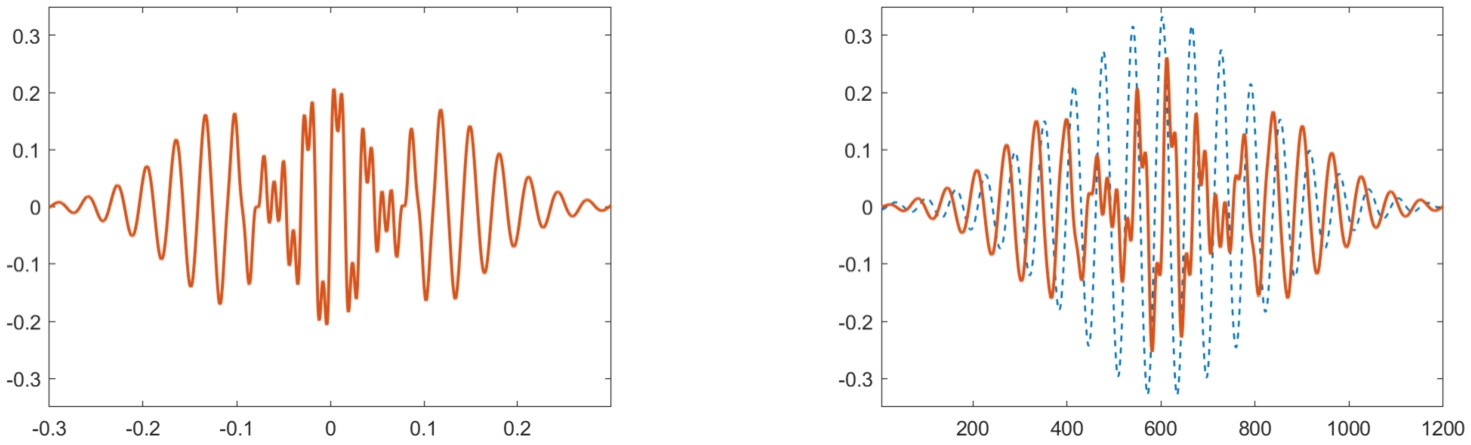
We choose . It has a maximum 1 on the interval . Then we chose . A plot of the function and are shown on Fig. 3, left. By (6.1), it must be the envelope of the oscillations of the subprincipal term and the computed profile in Fig. 3, right, confirms that. The curve in red is the subprincipal term divided by as above.
, , complex . All plots are of the real parts. Left: the theoretical envelope of the oscillations. Right: a plot of a vertical cross section of the subprincipal term through the center, rescaled (in red) and that of the linear solution (in blue).
The recovery of g then goes along the following lines. We fix , which fixes . Then the subprincipal term in (6.1) recovers . Knowing this for all ω recovers . Now, varying , we vary M on the range of χ, which recovers . It is also worth noticing that the envelope of the oscillations in Fig. 3, right, is proportional to , which recovers F, and therefore, f, up to a constant factor even without inverting the X-ray transform.
Nonlinearities with separated variables, a real incident wave
We assume a nonlinearity as in Section 6.2. Then by definition, where . We have
see (1.8). By (1.10), (3.14),
Then the subprincipal term in (3.13) takes the form
Assume now that F is a polynomial. Then . There is a well known expansions of monomials into Chebyshev polynomials; and we can use that in (6.2). We will do this for polynomials F of degree five only. We have
Then
The subprincipal term then takes the form, see (6.4),
In that case, we can easily demonstrate the two algorithms for recovery of the nonlinearity. To make things simple, assume that α is known. If we know (6.5) for a all M in some interval , then we can easily recover , and from the first harmonic in (6.5), which is proportional to . On the other hand, if M is fixed, we can recover the three , and then recover by its Chebyshev expansion.
In particular, if (equal to for u real), we get , , all other zero, see (3.21); therefore, the subprincipal term is
In Fig. 4, left, we plot a vertical cross-section of and that of the difference at . The theoretical maximum of that difference would be (modulo because it would depend on the phase shift of the oscillations in (6.4) related to maximizing χ there). This is in good agreement with the experimental plot.
Next to that plot, in Fig. 4, right, we plot the modulus of the Fourier transform of that difference on a log scale. We can see a peak at the incident frequency: the first (the carrier) harmonic, the third harmonic affecting the subprincipal term (and the lower order ones) and the fifth one affecting the lower order terms starting from the sub-subprincipal one.
, , real . Left: a plot of a vertical cross section of (scaled) through the center (in red) and that of u (in blue). Right: the modulus of the Fourier transform on a log scale of it: the first, third harmonics dominate, and the fifth one is coming from the third order term.
, , real . Left: a plot of the theoretical vertical cross section of . Right: the computed one vs. .
In the next example, we choose a polynomial of degree three in order to make the third harmonics not just measurable but also visible. We choose , , i.e.,
The first term represents a linear potential , actually. The coefficients are chosen so that for , which would kill the first harmonic when (close to its peak ). We plot the theoretical profile of the subprincipal term divided by h, versus the computed one in Fig. 5. There is no perfect match because of numerical dispersion: higher frequencies travel slower. Still, one can see evidence of the third harmonics near the center part. The effect is much stronger and eclipses the first harmonic approximately where χ is closer to 0.84. The linear solution is plotted divided by 3.
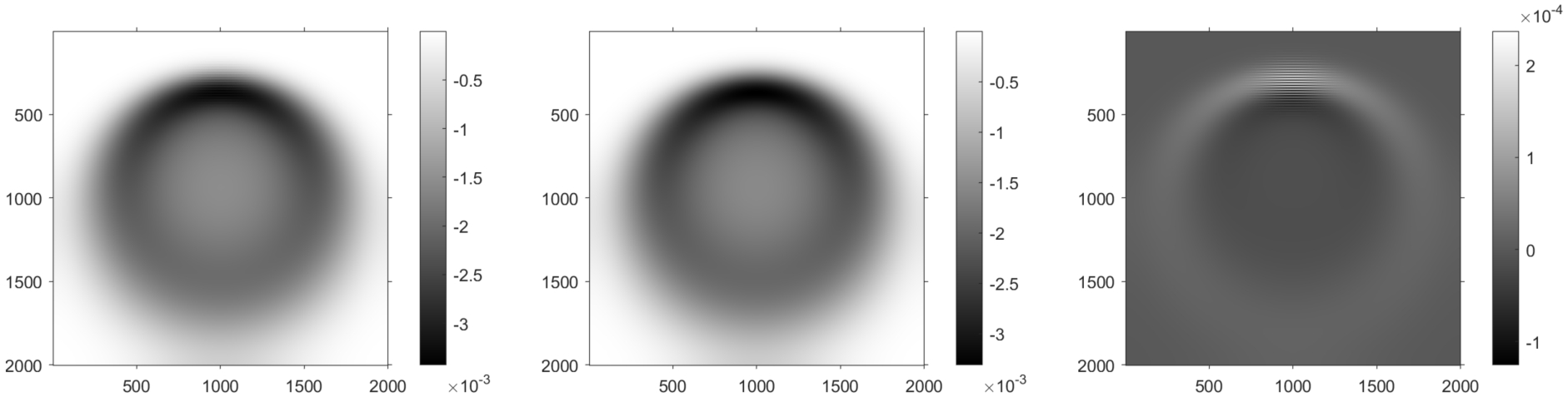
, , . Left: , represents the computed zeroth harmonic up to . Center: , the theoretical zeroth harmonic up to . Right: the difference of the two, representing the subprincipal term up to .
As in Fig. 6. Vertical profiles of , left, and , right; both plotted against u (in blue).
Let . We recall the analysis in Section 4.1. We compute a linear solution first, i.e., with . It is equal to , of course, which also represents the first term in (4.1). Then we compute as a numerical solution of (4.4). This would be the theoretical zeroth mode, up to a lower order term. Next, we compute u itself. The zeroth mode is relatively small since its size depends on χ as well (which has small “support” in our case), and it propagates in all directions; therefore it spreads. For this reason, we do not plot ; it looks more or less as the unperturbed in this case. In Fig. 6, we plot , , and at . According to (4.1), we should have
Therefore, the first two plots should be very close. Indeed, they are, and in , we see a slight hint of the oscillations due to the subprincipal term. The third plot represents the difference , and we see the oscillations. Note that the third plot is on a different scale – about 15 times smaller.
In Fig. 7, we plot vertical profiles of , left, and , right. Even though is a principal order term, as mentioned above, it is much smaller than the leading cosine term but still larger than the harmonic frequencies in the subprincipal term. The red curve on the left is an approximation of plus the subprincipal oscillatory terms. One can see the second harmonic mostly but dominates. With that low frequency wave subtracted (computed as a solution of (4.4)), we see, on the right, the second harmonic mostly. Numerical calculations, not shown, using the formula (4.6) to compute the theoretical amplitude of the second harmonic, agree very well with the plot in Fig. 7, right.
Remarks
In our main results, we do not impose assumptions on f guaranteeing existence and uniqueness of solutions of (1.1) for with arbitrary, even smooth but not small data. We prove that (1.1) is solvable with the initial conditions (1.3), or its real part, for ; and that the solution is smooth. By Theorem A.1, this solution is unique in the class of the bounded solutions at least (then the bound in Theorem A.1 holds). We do not exclude a priori existence of other, unbounded solutions. If f satisfies the assumptions of Theorem A.4 however, such solutions do not exist.
The methods extend naturally to a wave equation of the type related to a Riemannian metric or even to involving a magnetic and an electric potential, as long as there are no caustics. In fact, an electric potential term can be absorbed in the nonlinearity. Even Lorentzian wave operators can be treated. On the other hand, the inversion of the light ray transform on non-Minkowski manifolds is a more delicate problem.
One can pose the problem as a boundary value problem, in principle, on a cylinder , given a certain (non-linear) outgoing Dirichlet-to-Neumann map; where is a fixed domain. Under the assumption that the x-support of the nonlinearity is contained in Ω, a reduction from our formulation to such one and back is trivial. If we do not have the support assumption, we would have to deal with the boundary value problem for (1.1) first, a task we wanted to avoid for the purpose of this work. On the other hand, in authors’ view, the Dirichlet-to-Neumann map formulation for the wave equation is a bit artificial, while probing the medium with waves coming from outside at and measuring them outside again, for is a more natural formulation.
The compactness of does not seem to be needed for the direct problem. It certainly simplifies the exposition though.
One can use probing waves with support localized near a point of the type (or its real part), , at some initial moment, and an appropriate initial condition for , compare with (1.3) or (1.7). It was simpler to multiply (1.3) or (1.7) by a function of . Note that this localization would be h-independent, this would add more terms to the asymptotic expansion but it will not change the main idea.
We restrict the space dimension to or because the stability estimate (A.17) in Theorem A.3 has a short proof then.
Discussion
There has been an increased interest in inverse problems for non-linear hyperbolic equations recently. The pioneering works [22] and [25] suggested the higher order linearization idea mentioned in the introduction: send a wave , where are chosen so that they carry conormal singularities colliding at a chosen in advance point in time-space. This collision creates a point source through non-linear interaction which emits a spherical wave in the term as all . This term must be separated from all other, and its (weak) singularity has to be measured to recover the nonlinearity at that point in time-space. This method has been used in other papers, see, e.g., [11–13,23–25,35]. In [29], three such waves are sent and each one is a (linear) Gaussian beam.
In [31], we proposed a different direction: send a wave which propagates in the so-called weakly non-linear regime. It has an amplitude and a wavelength . The math theory of the weakly non-linear propagation has been developed in [3,4,15,16,26,27,30] (and other works), and it is known in the physics literature as well. Most of these work are on fist order non-linear systems. The waves there have the asymptotic behavior , where p is chosen so that the nonlinearity does not affect the eikonal equation for ϕ but affects the leading transport equation. In the equation , for example, one gets ; in particular for a cubic nonlinearity. The first transport equation is a non-linear ODE, or a system of such; and we showed that its solution induces a phase shift proportional to the X-ray transform of α, which allows us to recover α. The essential difference of the approach in [31] with the higher order linearization method is that we propagate waves in an actual non-linear regime; and the signal carrying the useful information is the principal one instead of a signal of order .
We want to emphasize that none of the approaches above can recover general nonlinearities away from the two extremes and . The first approach relies on asymptotically small waves having the potential to recover the Taylor expansion of about . In fact, this is what is done in [25], starting with terms of order 4 and higher. The second one requires an asymptotic expansion of f w.r.t. u when (at least as a leading term), requires strong assumptions on f for solvability, and one would expect that it has the potential to reliably recover that asymptotic behavior only, see also [31].
This brings us to the main idea of this paper: use solutions for which above, i.e., . Then the nonlinearity affects the subprincipal term but not the principal one of high-frequency solutions. We would expect to need high-frequency solutions in order to get good resolution.
The geometric optics analysis in the papers cited above, see, e.g., [26] for a survey, when applied to the wave equation, is not restricted to polynomial nonlinearities only (they are all x-independent though) but in effect, they always rely in the Taylor expansion of f about . In many of them, the small parameter h (called there ε) is a part of the PDE as well, for example the derivatives could be replaced by their semi-classical ones , , or similar. This is equivalent to rescaling time and/or space. This would change the value of p above for which the propagation is in the weakly non-linear regime, and it could make it . This happens for the PDE , for example, which is obtained from its h-independent version after the scaling , . We are studying h-independent PDEs however over h-independent domains in time-space.
We also want to mention the method of linearization near a non-zero solution initiated by Isakov. In [21], a uniqueness result is proven when there are also internal measurements at as well.
Footnotes
Acknowledgements
The authors would like to thank the anonymous referee for making valuable suggestions which helped us improve the exposition.
The first author is partly supported by the Simons Foundation grants #349507 and #848410. The second author is partly supported by the NSF Grants DMS-1900475 and DMS-2154489.
Properties of solutions of semilinear wave equations
We prove some results for semilinear wave equations which are known to experts, see [17,18,33], but their proofs do not seem to be readily available and so we include them here for completeness and because they are elementary. We should also mention that part of this discussion, including a different version of Theorem A.1, is contained in [14, Ch. 6],
Let be a Riemannian metric in , , such that if , for some , and let be the corresponding (negative) Laplacian:
We start by recalling an energy estimate for solutions of the linear wave equation: If satisfies
we have
where , and we suppressed the dependence on x. Then for any , and ,
provided the right hand side is finite.
We recall that a particular case of Gronwall’s inequality states that if f and g are continuous functions on , and
References
1.
A.S.Barreto, G.Uhlmann and Y.Wang, Inverse scattering for critical semilinear wave equations, 2020, arXiv:2003.03822.
2.
H.Brezis and P.Mironescu, Gagliardo–Nirenberg, composition and products in fractional Sobolev spaces, J. Evol. Equ.1(4) (2001), 387–404, Dedicated to the memory of Tosio Kato. doi:10.1007/PL00001378.
3.
P.Donnat and J.Rauch, Dispersive nonlinear geometric optics, J. Math. Phys.38(3) (1997), 1484–1523. doi:10.1063/1.531905.
N.Eptaminitakis and P.Stefanov, Weakly nonlinear geometric optics for the Westervelt equation and recovery of the nonlinearity, 2022, arXiv:2208.13945.
6.
A.Fiorenza, M.R.Formica, T.Roskovec and F.Soudsky, Detailed proof of classical Gagliardo–Nirenberg interpolation inequality with historical remarks.
7.
J.Ginibre and G.Velo, Generalized Strichartz inequalities for the wave equation, J. Funct. Anal.133(1) (1995), 50–68. doi:10.1006/jfan.1995.1119.
8.
R.Gorenflo and S.Vessella, Abel Integral Equations: Analysis and Applications, Lecture Notes in Mathematics, Vol. 1461, Springer-Verlag, Berlin, 1991.
9.
M.G.Grillakis, Regularity and asymptotic behaviour of the wave equation with a critical nonlinearity, Ann. of Math. (2)132(3) (1990), 485–509. doi:10.2307/1971427.
10.
O.Guès, Développement asymptotique de solutions exactes de systèmes hyperboliques quasilinéaires, Asymptotic Anal.6(3) (1993), 241–269. doi:10.3233/ASY-1993-6303.
11.
P.Hintz and G.Uhlmann, Reconstruction of Lorentzian manifolds from boundary light observation sets, Int. Math. Res. Not. IMRN22 (2019), 6949–6987. doi:10.1093/imrn/rnx320.
12.
P.Hintz, G.Uhlmann and J.Zhai, An inverse boundary value problem for a semilinear wave equation on Lorentzian manifolds, International Mathematics Research Notices5 (2021).
13.
P.Hintz, G.Uhlmann and J.Zhai, The Dirichlet-to-Neumann map for a semilinear wave equation on Lorentzian manifolds, 2021, arXiv:2103.08110.
J.-L.Joly, G.Métivier and J.Rauch, Coherent and focusing multidimensional nonlinear geometric optics, Ann. Sci. École Norm. Sup. (4)28(1) (1995), 51–113. doi:10.24033/asens.1709.
16.
J.-L.Joly and J.Rauch, Justification of multidimensional single phase semilinear geometric optics, Trans. Amer. Math. Soc.330(2) (1992), 599–623. doi:10.1090/S0002-9947-1992-1073774-7.
17.
L.V.Kapitanskii, The Cauchy problem for the semilinear wave equation. II, Zap. Nauchn. Sem. Leningrad. Otdel. Mat. Inst. Steklov. (LOMI)182 (1990), 38–85. (Kraev. Zadachi Mat. Fiz. i Smezh. Voprosy Teor. Funktsii. 21), 171.
18.
L.V.Kapitanskii, The Cauchy problem for the semilinear wave equation. III, Zap. Nauchn. Sem. Leningrad. Otdel. Mat. Inst. Steklov. (LOMI)181 (1990), 24–64. (Differentsial’naya Geom. Gruppy Li i Mekh. 11), 186.
19.
T.Kato and G.Ponce, Commutator estimates and the Euler and Navier–Stokes equations, Comm. Pure Appl. Math.41(7) (1988), 891–907. doi:10.1002/cpa.3160410704.
20.
J.B.Keller, On solutions of nonlinear wave equations, Comm. Pure Appl. Math.10 (1957), 523–530. doi:10.1002/cpa.3160100404.
21.
Y.Kian, On the determination of nonlinear terms appearing in semilinear hyperbolic equations, Journal of the London Mathematical Society.
22.
Y.Kurylev, M.Lassas and G.Uhlmann, Inverse problems for Lorentzian manifolds and non-linear hyperbolic equations, Invent. Math.212(3) (2018), 781–857. doi:10.1007/s00222-017-0780-y.
23.
M.Lassas, T.Liimatainen, L.Potenciano-Machado and T.Tyni, Uniqueness and stability of an inverse problem for a semi-linear wave equation, 2020, arXiv preprint arXiv:2006.13193.
24.
M.Lassas, G.Uhlmann and Y.Wang, Determination of vacuum space-times from the Einstein–Maxwell equations, 2017, arXiv:1703.10704.
25.
M.Lassas, G.Uhlmann and Y.Wang, Inverse problems for semilinear wave equations on Lorentzian manifolds, Comm. Math. Phys.360(2) (2018), 555–609. doi:10.1007/s00220-018-3135-7.
26.
G.Métivier, The mathematics of nonlinear optics, in: Handbook of Differential Equations: Evolutionary Equations, Handb. Differ. Equ., Vol. V, Elsevier/North-Holland, Amsterdam, 2009, pp. 169–313. doi:10.1016/S1874-5717(08)00210-7.
27.
G.Métivier, J.-L.Joly and J.Rauch, Recent results in non-linear geometric optics, in: Hyperbolic Problems: Theory, Numerics, Applications, Vol. II (Zürich, 1998), Internat. Ser. Numer. Math., Vol. 130, Birkhäuser, Basel, 1999, pp. 723–736. doi:10.1007/978-3-0348-8724-3_23.
28.
Y.Meyer, Remarques sur un théorème de J.-M. Bony, Rend. Circ. Mat. Palermo (2) (suppl. 1) (1981), 1–20.
29.
L.Oksanen, M.Salo, P.Stefanov and G.Uhlmann, Inverse problems for real principal type operators, 2020, arXiv preprint arXiv:2001.07599.
30.
J.Rauch, Hyperbolic Partial Differential Equations and Geometric Optics, Graduate Studies in Mathematics, Vol. 133, American Mathematical Society, Providence, RI, 2012.
31.
A.Sá Barreto and P.Stefanov, Recovery of a cubic non-linearity in the wave equation in the weakly non-linear regime, Comm. Math. Phys.392(1) (2022), 25–53. doi:10.1007/s00220-022-04359-0.
32.
J.Shatah and M.Struwe, Regularity results for nonlinear wave equations, Ann. of Math. (2)138(3) (1993), 503–518. doi:10.2307/2946554.
33.
J.Shatah and M.Struwe, Well-posedness in the energy space for semilinear wave equations with critical growth, Internat. Math. Res. Notices7 (1994).
34.
P.Stefanov, Support theorems for the light ray transform on analytic Lorentzian manifolds, Proc. Amer. Math. Soc.145(3) (2017), 1259–1274. doi:10.1090/proc/13117.
35.
G.Uhlmann and Y.Zhang, Inverse boundary value problems for wave equations with quadratic nonlinearities, J. Differential Equations309 (2022), 558–607. doi:10.1016/j.jde.2021.11.033.