This paper studies the stability of an abstract thermoelastic system with Cattaneo’s law, which describes finite heat propagation speed in a medium. We introduce a region of parameters containing coupling, thermal dissipation, and possible inertial characteristics. The region is partitioned into distinct subregions based on the spectral properties of the infinitesimal generator of the corresponding semigroup. By a careful estimation of the resolvent operator on the imaginary axis, we obtain distinct polynomial decay rates for systems with parameters located in different subregions. Furthermore, the optimality of these decay rates is proved. Finally, we apply our results to several coupled systems of partial differential equations.
In this paper, we consider an abstract thermoelastic system that describes the interaction between heat conduction and material deformation in solids. The model is defined as follows:
where A is a self-adjoint, positive definite operator with compact resolvent on the complex Hilbert space H. The constants , , are the inertial term, wave speed, and the relaxation parameter, respectively. We define a region of parameters by , where α, β, γ describe the coupling, thermal damping, and inertial characteristics. The case where is omitted here because it can be included in the case where . Throughout this paper, we use and to denote the inner product and norm in H.
If , the second and third equations in (1.1) reduce to an abstract system that covers the classical heat equations subject to Fourier’s law. However, Fourier’s law implies that all disturbances propagate at infinite speed, which is unacceptable in some physical processes such as high-frequency thermal phenomena and microscale heat conduction [7,19]. Because of this shortcoming, various non-Fourier heat flux laws (e.g., Cattaneo’s law) have been developed since the 1940s. In Cattaneo’s theory [6,31], a thermal relaxation parameter is introduced. This resolves the paradox of infinite speed of heat transfer in Fourier’s law and characterizes the wave-like motion of heat, also referred to as the second sound in physics. Therefore, we say the system (1.1) follows Fourier’s law (or with thermal damping of Fourier’s type) if and follows Cattaneo’s law (or with thermal damping of Cattaneo’s type) if , respectively.
On the other hand, the natural energy of system (1.1) is defined by
A direct computation gives
which implies that the energy is decreasing on . Consequently, one natural question is to understand the asymptotic behavior (i.e., the stability when t tends to ∞) of the dissipative system (1.1).
The stability of abstract thermoelastic systems can be traced back to the early 1990s. In 1993, Russell [30] introduced an abstract framework of an indirectly damped system, i.e., a conservative system coupled with a directly damped system. This is different from directly damped systems which are obtained by inserting dissipative terms directly into the originally conservative system. Furthermore, Russell claimed that, “at the present time, it does not appear possible to give a result for indirect damping mechanisms which even approaches the known direct damping results just listed in mathematical generality.”
Inspired by Russell, research along this direction started, first with the system (1.1) when , motivated by thermal elastic equations subject to Fourier’s law. In 1996, Rivera and Racke [28] studied the regularity and exponential stability of the system (1.1) with ; They also provided specific examples of that system. Later, Ammar-Khodja et al. [1] identified the parameters regions for exponential stability of system (1.1) when . Extending these results, Hao and Liu [15] obtained the optimal polynomial stability of the system beyond the regions of exponential stability presented in [1]. Further details on the case can be found in [3,8,20–22] and the references therein. Regarding the case where and , Dell’Oro et al. [9] investigated the stability of system (1.1) under the conditions and . To the best of our knowledge, this was the first result considering the inertial term. Later, Fernández Sare et al. [11] provided a comprehensive overview of the exponential stability and polynomial stability for parameters and . The optimality of the polynomial decay rates in [11] was proved in [10]. So far, the research on stability and optimal decay rates of the thermoelastic system (1.1) following Fourier’s law has been relatively complete.
As pointed out earlier, studies of thermoelastic systems following Cattaneo’s law were investigated to revise the downsides of Fourier’s law. In 2019, Fernández Sare et al. [11] characterized the exponentially stable region of the thermoelastic model with Cattaneo’s law and claimed that, “the change from Fourier’s law to Cattaneo’s law leads to a loss of exponential stability in most coupled systems.” Later, Han et al. [13] demonstrated that if the system maintains the same wave speed, i.e., , the region of exponential stability outlined in [11] can be expanded. Furthermore, they characterized the polynomial decay rates of system (1.1) with two specific choices of α.
In this paper, we aim to make a contribution toward the open problem mentioned above by Russell. We continue the study of Han et al. [13] regarding the polynomial stability of system (1.1) following Cattaneo’s law, both with and without an inertial term, when the parameters lie outside of exponentially stable regions. Specifically, our results reveal the influence of coupling term, thermal damping term and the inertial term (determined by α, β, γ, respectively) on the stability and decay rate of the abstract coupled system (1.1). For the system with an inertial term, we divide the non-exponential stable region of parameters into three parts and obtain different polynomial decay rates for each part. On the other hand, for the system without an inertial term, the region of parameters is two-dimensional and divided into two subregions based on spectral analysis. Similarly, we obtain polynomial decay rates for each of these subregions. Furthermore, we prove the optimality of all obtained polynomial decay rates. Our main approach relies on the frequency domain characterization developed by Borichev and Tomilov [5], along with interpolation inequalities and detailed spectral analysis.
The rest of the paper is organized as follows. In Section 2, we introduce the problem and outline the main results. The proofs of polynomial stability for the system with and without an inertial term are given in Section 3 and Section 4, respectively. In Section 5, we show the optimality of the decay rates in each subregion of parameters. Finally, in Section 6, we apply our results to several partial differential equation systems and obtain optimal polynomial decay rates.
Preliminaries and main results
In this section, we state some preliminaries and the main results of this paper. To describe system (1.1) as an abstract first-order evolution equation, we define a Hilbert space
which is equipped with the inner product
where , . Let , define , , and , then system (1.1) can be written as an evolution equation in :
where the operator is defined by
with domain
It is clear that
where for .
The well-posedness of the system (2.1) is stated as follows.
Letandbe defined as above and. If, thenandgenerates a-semigroupof contractions on.
It is easy to see that is a densely defined operator in by (2.2) and the density of in . Moreover,
then is dissipative in .
We claim that is a bijection, then exists. In fact, for any given , let , where
and
then and . This implies that is an injective as well.
Now we show the boundedness of . Note that , we have
Recalling , we get
and
Consequently, one obtains the boundedness of by (2.3)–(2.6). By the Lumer-Phillips Theorem [26], generates a -semigroup of contractions on . The proof is completed.
If , 0 is a spectrum point of . This case will be considered in the future.
Our interest is the stability properties of system (1.1), especially the polynomial stability when parameters satisfy certain conditions. Let us recall the corresponding definitions.
Let generate a -semigroup of contractions on a Hilbert space .
is said to be strongly stable if , ;
is said to be exponentially stable with decay rate , if there exists a constant such that
is said to be polynomially stable of order if there exists a constant such that
Based on the result in [2,17], the strong stability of the semigroup is equivalent to since and is compact [13]. The following lemma can be proved by the standard argument (see, e.g., the proof of [13, Theorem 2.1]), we omit the details here.
Assume thatsatisfies. Thenfor, and consequently, the semigroupis strongly stable.
We further discuss the explicit decay rates of the system with . To begin with, we divide the region of the parameter E into the following subregions according to the analysis for the spectrum of in Section 5.
The parameters region can be partitioned into the following non-overlapping subregions
From the definition, it is clear that planes are (parts) of the intersections of and , where , , lines are intersections of , , , where , . Furthermore, the plane is a part of the boundary of , the line is a special part of the boundary of , the line is a part of the boundary of , and is a point. The regions in Definition 2.4 are visualized in Fig. 1.
Partition of E according to Theorem 2.4 when γ is , , , respectively.
Regions of polynomial stability when .
According to [13, Theorem 2.1], it was proved that the semigroup is exponentially stable on plane , along the lines , and at the point . In the case of region , where 0 is a spectrum, we will analyze it in the future work. Moreover, the asymptotic behavior on remains unclear at present (as indicated by the analysis in Section 5).
More precisely, due to Remark 2.3 and spectral analysis in Section 5, we shall analyze the stability and decay rate of system (1.1) with inertial term () when parameters belong to the following three regions:
The regions are illustrated in Fig. 2. The first main result of this paper reads as follows.
Letand,be defined as in (2.7). Then semigroupassociated with (2.1) has the following stability properties:
It is polynomially stable of orderin;
It is polynomially stable of orderin;
It is polynomially stable of orderin.
We also consider the case in which there is no inertial term in system (1.1). Similarly, we partition the region of the parameters as follows.
The parameters region can be partitioned into the following non-overlapping subregions
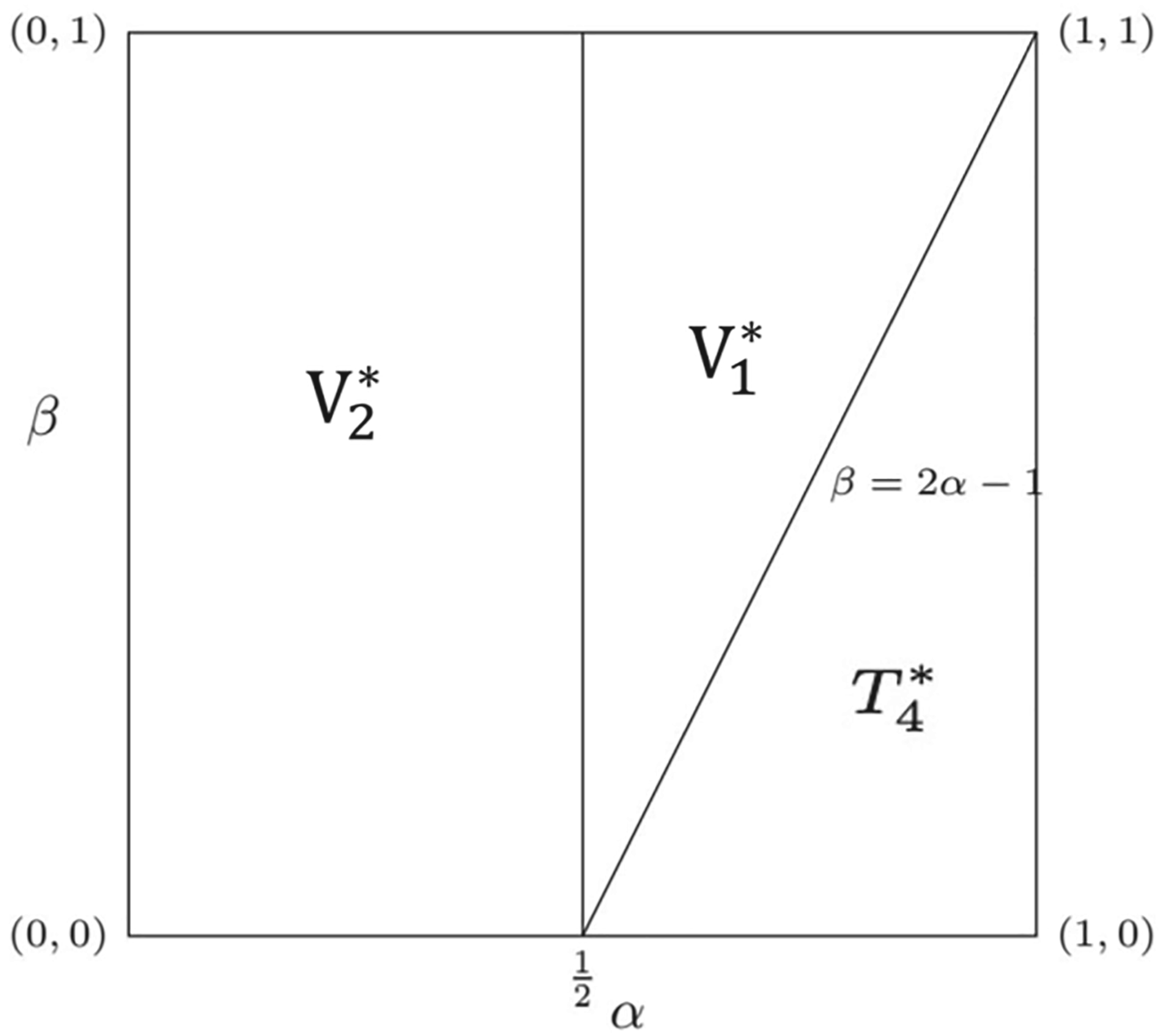
In Fig. 3, we illustrate the regions given in Definition 2.6. The lines , denote the boundaries of , and , , respectively. The lines and are boundaries of . The point is the intersection of . The region is the area where 0 is a spectrum of , which will be discussed in the future work.
Partition of according to Theorem 2.6.
According to [13, Theorem 2.2], the system is exponentially stable on the point . We consider the decay rate of the solution when parameters belonging to the remaining area . Based on the analysis presented in Section 5, we partition this region into the following two parts.
The regions of are shown in Fig. 4. The second main result is as follows.
Partition of .
Letandbe defined as in (2.8). Then semigroupassociated with (2.1) satisfies
It is polynomially stable of orderin;
It is polynomially stable of orderin.
Furthermore, through a detailed spectral analysis, we can show the sharpness of the decay rates obtained in the above two theorems.
The orders of polynomial decay in Theorems 2.5 and 2.7 are all optimal.
In Theorems 2.5 and 2.7, we provide a comprehensive analysis of polynomial stability for system (1.1) under varying coupling effects, thermal damping and inertial characteristics. When , signifying the presence of an inertial term in system (1.1), we prove that the corresponding semigroup decays polynomially at different rates when parameters belong to different subregions. In the case where there is no inertial term (i.e., ), we establish a relationship between the parameters α, β and the order of polynomial stability. Our results complement the stability analysis of the system previously discussed in [13]. On the other hand, it is worth noting that the decay rates obtained in Theorem 2.7, are slower when compared to the findings presented in [16]. The work in [16] primarily focuses on a thermoelastic system with Fourier’s law while neglecting the inertial term. This observation reveals that the thermal damping of Cattaneo’s type is weaker than the Fourier’s type.
The proofs for polynomial stability rely on the following lemma, which gives necessary and sufficient conditions for the polynomial stability of -semigroup (see [5,23] or [4,29] for more general case).
Assume thatgenerates a-semigroupof contraction on a Hilbert spaceand satisfies. Then,is polynomially stable with order k, if and only if
The following interpolation theorem will play a crucial role in our proof.
Letbe self-adjoint and positive definite,. Then
The case can be found in [24]. If and , we let , . It follows from (2.10) that
The other cases can be proved by the same argument.
Polynomial stability of the system with an inertial term (Proof of Theorem 2.5)
This section is devoted to analyzing the polynomial stability of system (1.1) with . Due to Lemmas 2.3 and 2.9, it is sufficient to show that there exists a constant such that
holds for some .
By contradiction, we suppose that (3.1) fails. Then, there at least exists one sequence , where , such that
and as ,
i.e.,
For, one has
Furthermore, when, it holds
We can obtain (3.8) by (3.3) and the fact that is dissipative. Then, combining (3.7) and (3.8) yields (3.9). (3.10) and (3.11) are clear from (3.2) and (3.4).
Now, we shall show (i)–(iii) in Theorem 2.5, respectively.
For the first term of (3.36), one can deduce from (3.29) and (3.35) that
To estimate the second term of (3.36), we notice that if ,
where we have used , Lemmas 2.10 and 3.1. Therefore, from (3.8), (3.10) and (3.38), we can deduce that
Therefore, we get (3.31) by substituting (3.37) and (3.39) into (3.36).
Finally, similar to (i), we can show that the fourth term in (3.18) tends to 0. Indeed, we have thanks to (3.10), (3.30) and . Thus, by (3.18), along with (3.31), we get . Therefore, combining this with (3.30), (3.31), one can arrive at the contradiction .
Note that we still have (3.18) now. To show the contradiction, we divide into four regions (see Fig. 5), and we shall prove , , by using (3.18) in each region, respectively(Case iii-A, B, C, D).
Subregions of .
Case iii-A. Let and .
The assumption and (3.5), (3.10), (3.43) imply that
Note that due to and . Then using Lemma 2.10, along with (3.10) and (3.47), one has
Thus, (3.31) holds in Case iii-A. It is clear that by , (3.2) and (3.43). Therefore, by (3.18) along with (3.31), we obtain , and consequently, by (3.8), (3.18), (3.31) and (3.43).
Case iii-B. Let , and .
Similar to (i), one has that (3.14) still holds since . Let us estimate the first two terms of (3.14). First, note that since and . From (3.10) and (3.11), we can deduce that
Substituting (3.43), (3.50), (3.51) into (3.14), we get , i.e., (3.31) holds. Then, similar to the discussion in Case iii-A, we can get due to and (3.43), which together with (3.18) and (3.31) implies . Finally, combining this with (3.43), we get the contradiction .
By interpolation (2.10), along with (3.8) and (3.63), we get
Note that . Substituting (3.43), (3.61) and (3.64) into (3.62) yields
Finally, the assumption , (3.4) and (3.9) imply that
Then, by (3.18), along with (3.65) and (3.66), we obtain
In summary, by (3.8), (3.43), (3.65) and (3.67), we have arrived at the contradiction .
Polynomial stability of the system without an inertial term (Proof of Theorem 2.7)
This section is devoted to considering the stability of system (1.1) without an inertial term, i.e., . Note that by Lemma 2.3, we know that the corresponding semigroup is strongly stable. We shall further estimate the polynomial decay rates of the solutions to the system when parameters , , respectively.
Similar to the argument in Section 3, we still employ the proof by contradiction to show Theorem 2.7. Specifically, suppose (3.1) fails. Then, there at least exists a sequence such that (3.2)–(3.3) hold with , that is
Consequently, (3.8)–(3.10) remain true. Now, we proceed to show (i)–(ii) in Theorem 2.7, respectively.
Recalling , we deduce from (2.10), (3.10) and (4.14) that
This implies that
Thus, substituting (4.13) and (4.15) into (4.12), along with , yields
We claim that
Indeed, note that (4.7) still holds for this case. Then, in order to show (4.17), it suffices to prove that the first and second terms in (4.7) are both .
By (4.21) and (4.22), we have proved that the second term in (4.7) is , and hence, (4.17) holds.
Moreover, it is clear that by (3.2), (4.16) and . This along with (4.10) and (4.17), yields
In summary, by (3.8), (4.16), (4.17) and (4.23), we have arrived at the contradiction . The desired result follows.
Proof of optimality of decay rates (Theorem 2.8)
In this section, we shall prove Theorem 2.8, which shows the orders of polynomial decay achieved in Theorem 2.5 and Theorem 2.7 are indeed optimal. To this end, we analyze the eigenvalues λ of the operator , both when (in the presence of an inertial term) and when (in the absence of an inertial term). In addition, we assume that the system has different wave speeds, that is, . In what follows, we first give the characteristic equation associated with (Section 5.1). We then describe the solutions to the characteristic equation in an asymptotic setting in Section 5.2 when the system is with an inertial term (Table 1) and without an inertial term (Table 2), respectively. Finally, we show that these eigenvalues indicate the optimality of the polynomial decay rates described in Theorem 2.5 and Theorem 2.7 (Section 5.3).
Characteristic equations
We shall obtain the characteristic equations associated with the operator when the system is with an inertial term () and without an inertial term (). For this purpose, recall that A is a self-adjoint, positive-definite operator with compact resolvent. Thus, there exists a sequence of eigenvalues of A such that
A direct computation gives that the eigenvalues λ of operator satisfy the following quartic equation:
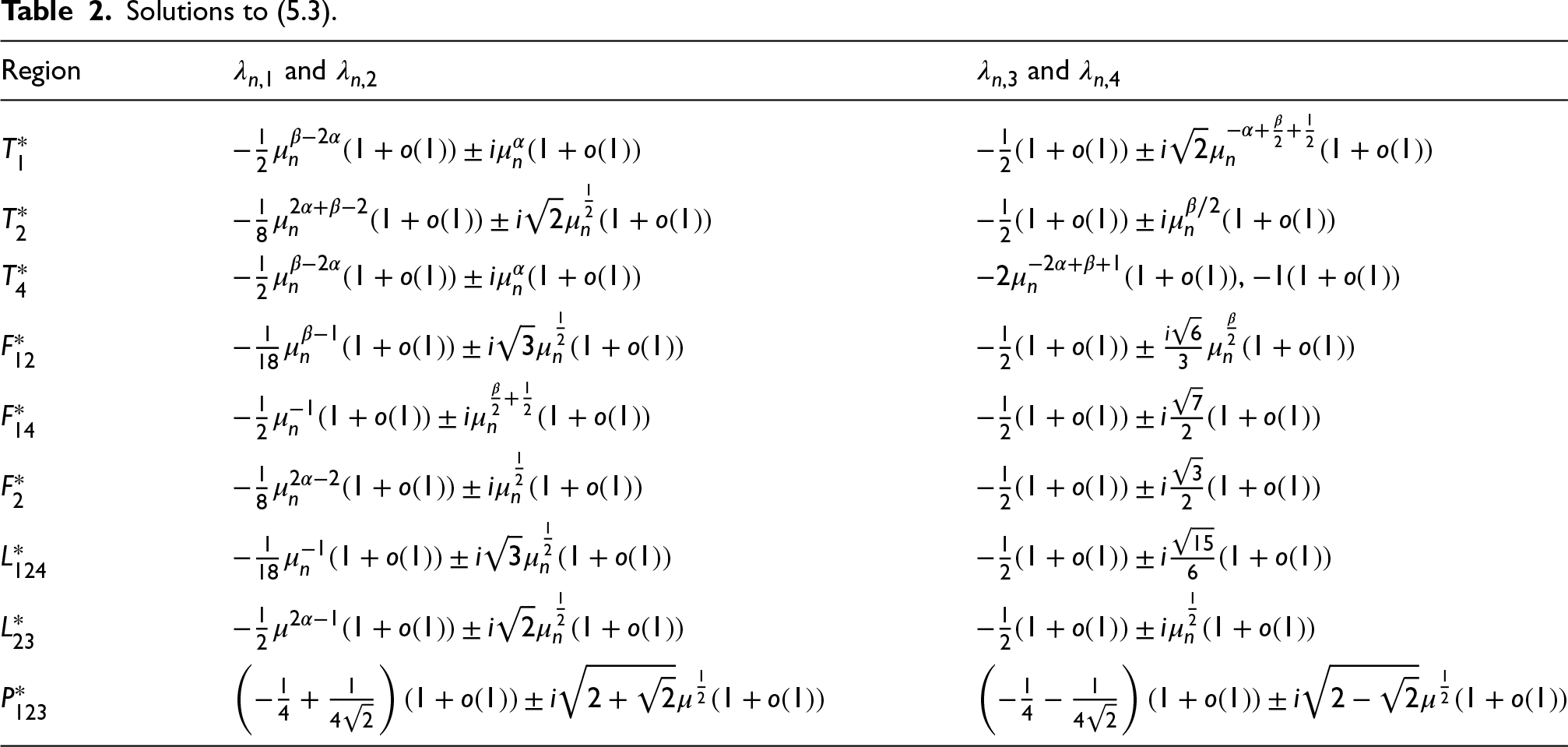
Since the system has different wave speeds, we take and so that without loss of generality. In addition, by taking and , we can derive the characteristic equation of the system from (5.1) when it is with and without an inertial term respectively as follows:
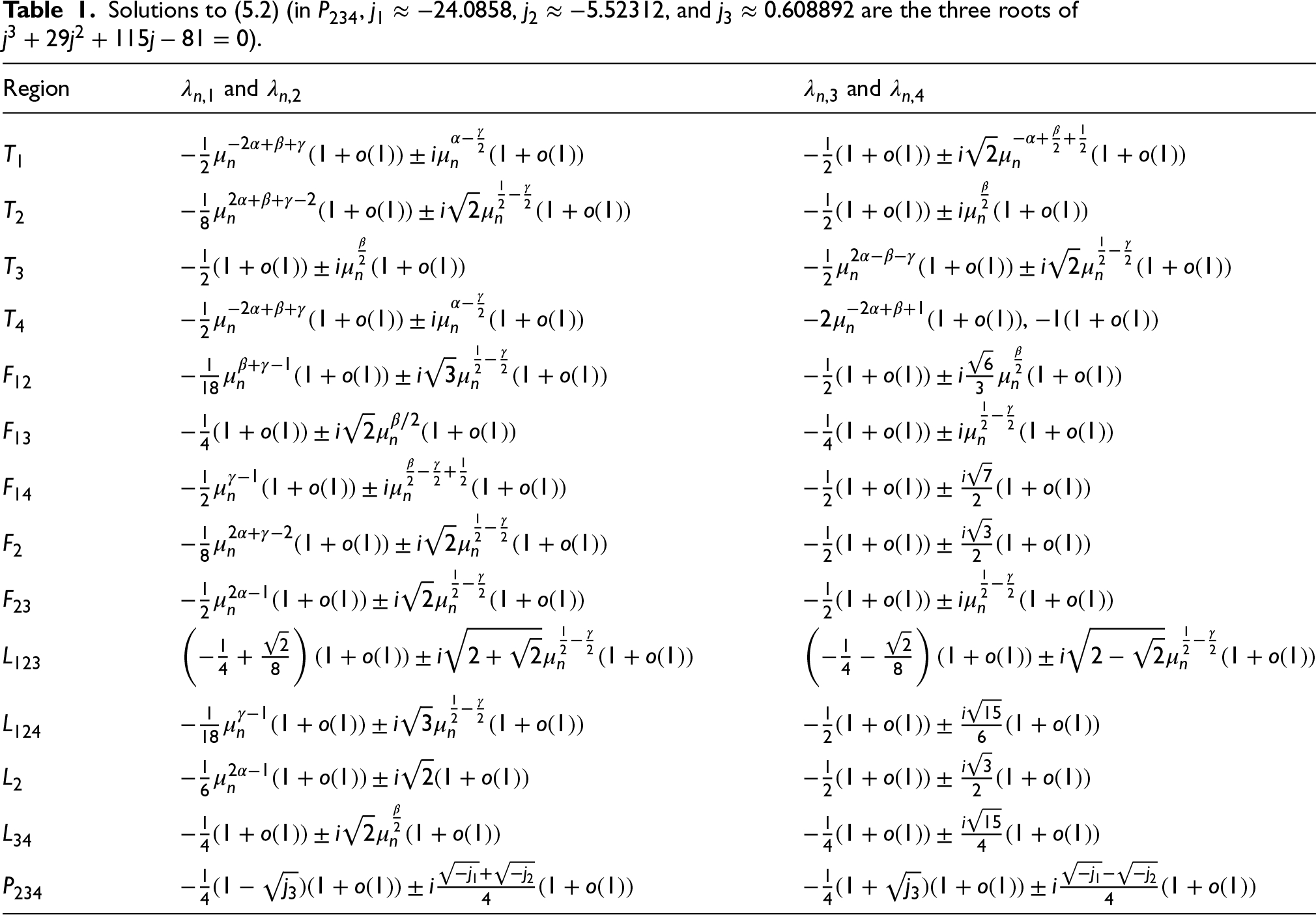
In (5.2) and (5.3), are sequences of eigenvalues of . We seek to solve (5.2) and (5.3) for in an asymptotic setting, that is, in the setting as . Several existing works [10,13,14,16] have described the applications of a procedure that can also be used to solve (5.2) and (5.3). In this paper, we apply this procedure to solve (5.2) and (5.3), and omit the discussion of its details. We refer readers to the aforementioned works for details of this procedure. For each region in Defintions 2.4 and 2.6, the procedure applies the quartic formula [18] to identify the roots of (5.2) and (5.3). The solutions to (5.2) and (5.3) are summarized in Tables 1 and 2, respectively.
Solutions to (5.2) (in , , , and are the three roots of ).
Region
and
and
,
Eigenvalues of the system
First, we consider the solutions to (5.2), which are eigenvalues of with an inertial term, in each region given in Definition 2.4. It should be noticed that the partition in Definition 2.4 is similar to that presented in [13], where the exponential stability was established when parameters . More precisely, the solutions to (5.2) are presented in Table 1. As a result, one can conclude that in region , even though the coefficients for the real and imaginary parts of the eigenvalues on , , , and are different, there always exists a sequence of eigenvalues on each region such that , where is defined in Theorem 2.5. Therefore, the decay properties of the corresponding semigroup are consistent in each part of by [25].
By a similar argument on , and , respectively, we can obtain that the long-time behavior of system (1.1) remains the same in every part of the interior of or . Note that to characterize the long-time behavior in and , we have used the solutions to (5.3) provided in Table 2.
With the eigenvalues of as given in Table 1 and Table 2, we can show that the polynomial decay rates given in Theorems 2.5 and 2.7 are optimal.
We first show the rates achieved in Theorem 2.5 are optimal. From Table 1, we can deduce that there exists a sequence of eigenvalues satisfying
where and are defined in Theorem 2.5. Then by the same argument as given in [16, Corollary 4.7], we can obtain
Therefore, the obtained decay rates in Theorem 2.5 are optimal.
Following a similar discussion as given above, we can also derive that the obtained decay rates given in Theorem 2.7 are also optimal based on the expression of eigenvalues in Table 2.
Examples
This section is devoted to applying our results to some coupled PDE systems and get the optimal decay rates.
Assume Ω is a bounded open subset of with smooth boundary Γ. Consider the following thermoelastic plate equation of Cattaneo’s type (thermoelastic Euler-Bernoulli plate if or thermoelastic Rayleigh plate if ) [12,27]:
To apply the abstract results in Theorems 2.5 and 2.7 to this system, we let operator be the bi-Laplace operator on Ω with domain , . Note that system (6.1) is corresponding to the abstract system (1.1) with when . Thus, the semigroup corresponding to (6.1) is polynomially stable with order since parameters in Theorem 2.5.
While for the case , the decay rate of the semigroup is due to Theorem 2.7 with parameters .
Let Ω, Γ be defined as in Example 1. Consider the following model:
Let , and . By Theorem 2.5, we obtain that and the semigroup associated with system (6.2) decays polynomially with optimal order . Moreover, for the case , the semigroup corresponding to system (6.2) decays polynomially with optimal order since by applying Theorem 2.7.
Let Ω, Γ be defined as in Example 1. Consider the following model:
Let , and , where ν is the outward unit normal vector to the boundary. If , using Theorem 2.5 yields that and the semigroup associated with system (6.3) decays polynomially with optimal order . When , by applying Theorem 2.7, the solution decays polynomially with optimal order since .
Conclusions
In this work, we investigated the polynomial stability of abstract thermoelastic systems with Cattaneo’s law. We have achieved the following key results:
For the systems with an inertial term (), we systematically classified the “non-exponential stability” parameters region into three distinct subregions. For each subregion, we derived explicit polynomial decay rates that are contingent on the specific choice of system parameters .
For the systems without an inertial term (), we similarly partitioned the “non-exponential stability” region into two subregions and provided polynomial decay rates for both subregions.
Furthermore, we conducted a detailed asymptotic spectral analysis on the system operator in the presence or absence of an inertial term. This analysis reveals the asymptotic behavior of the eigenvalues of the system operator. Moreover, it first provides us with the candidates for the growth order of the system resolvent operator on the imaginary axis in each subregion, then allows us to confirm the optimality of the aforementioned decay rates.
Upon comparing the stability outcomes between systems with and without an inertial term, it is evident that this term plays a significant influence on the stability characteristics of these coupled partial differential equation systems.
Future work will aim to investigate the stability of system (1.1) when parameters satisfy and . It is worth noting that the presence of zero as a spectrum point of the system operator in this case, as mentioned in Remark 2.1, poses challenges when discussing the long-term behavior of this system. Batty et al. [4] and Rozendaal et al. [29] provide novel methods to investigate the stability of semigroups, which could be used to help us further identify to what extent the decay rates of the system with can be achieved. Moreover, the regularity of the semigroup associated with system (1.1) is another interesting issue, which is worth studying in the future.
Footnotes
Acknowledgements
CHXD was supported by the China Scholarship Council (grant No. 202206030056), ZJH was supported by the National Natural Science Foundation of China (grant No. 62073236). QZ was supported by the National Natural Science Foundation of China (grant No. 12271035, 12131008) and Beijing Municipal Natural Science Foundation (grant No. 1232018).
References
1.
Ammar-KhodjaF.BaderA.BenabdallahA., Dynamic stabilization of systems via decoupling techniques, ESAIM: Control, Optimisation and Calculus of Variations4 (1999), 577–593.
2.
ArendtW.BattyC.J.K., Tauberian theorems and stability of one-parameter semigroups, Transactions of the American Mathematical Society306(2) (1988), 837–852. doi:10.1090/S0002-9947-1988-0933321-3.
3.
AvalosG.LasieckaI., Exponential stability of a thermoelastic system with free boundary conditions without mechanical dissipation, SIAM Journal on Mathematical Analysis29(1) (1998), 155–182. doi:10.1137/S0036141096300823.
4.
BattyC.J.K.ChillR.TomilovY., Fine scales of decay of operator semigroups, Journal of the European Mathematical Society18(4) (2016), 853–929. doi:10.4171/jems/605.
5.
BorichevA.TomilovY., Optimal polynomial decay of functions and operator semigroups, Mathematische Annalen347 (2010), 455–478. doi:10.1007/s00208-009-0439-0.
6.
CattaneoC., Sulla conduzione del calore, Atti del Seminario Matematico e Fisico dell’Università di Modena3 (1948), 83–101.
7.
ChandrasekharaiahD.S., Hyperbolic thermoelasticity: A review of recent literature, Applied Mechanics Reviews51(12) (1998), 705–729. doi:10.1115/1.3098984.
8.
ContiM.LiveraniL.PataV., Thermoelasticity with antidissipation, Discrete and Continuous Dynamical Systems. Series S15(8) (2022), 2173–2188. doi:10.3934/dcdss.2022040.
9.
Dell’OroF.Muñoz RiveraJ.E.PataV., Stability properties of an abstract system with applications to linear thermoelastic plates, Journal of Evolution Equations4(13) (2013), 777–794. doi:10.1007/s00028-013-0202-6.
10.
Fernández SareH.D.KuangZ.LiuZ., Regularity analysis for an abstract thermoelastic system with inertial term, ESAIM: Control, Optimisation and Calculus of Variations27 (2021), S24.
11.
Fernández SareH.D.LiuZ.RackeR., Stability of abstract thermoelastic systems with inertial terms, Journal of Differential Equations267(12) (2019), 7085–7134. doi:10.1016/j.jde.2019.07.015.
12.
GraffK.F., Wave Motion in Elastic Solids, Dover Publications, 2012.
13.
HanZ.KuangZ.ZhangQ., Stability analysis for abstract theomoelastic systems with Cattaneo’s law and inertial terms, Mathematical Control and Related Fields13 (2023), 1639–1673. doi:10.3934/mcrf.2022053.
14.
HaoJ.KuangZ.LiuZ.YongJ., Stability analysis for two coupled second order evolution equations. Available at SSRN 4405839 (2023).
15.
HaoJ.LiuZ., Stability of an abstract system of coupled hyperbolic and parabolic equations, Zeitschrift für angewandte Mathematik und Physik64(4) (2013), 1145–1159. doi:10.1007/s00033-012-0274-0.
16.
HaoJ.LiuZ.YongJ., Regularity analysis for an abstract system of coupled hyperbolic and parabolic equations, Journal of Differential Equations259(9) (2015), 4763–4798. doi:10.1016/j.jde.2015.06.010.
17.
HuangF., Strong asymptotic stability of linear dynamical systems in Banach spaces, Journal of Differential Equations104(2) (1993), 307–324. doi:10.1006/jdeq.1993.1074.
18.
IrvingR.S., Integers, Polynomials, and Rings: A Course in Algebra, Springer, 2004.
KimJ.U., On the energy decay of a linear thermoelastic bar and plate, SIAM Journal on Mathematical Analysis23(4) (1992), 889–899. doi:10.1137/0523047.
21.
LasieckaI.TriggianiR., Two direct proofs on the analyticity of the s.c. semigroup arising in abstract thermo-elastic equations, Advances in Differential Equations (1998).
22.
LiuK.LiuZ., Exponential stability and analyticity of abstract linear thermoelastic systems, Zeitschrift für angewandte Mathematik und Physik ZAMP48 (1997), 885–904. doi:10.1007/s000330050071.
23.
LiuZ.RaoB., Characterization of polynomial decay rate for the solution of linear evolution equation, Zeitschrift für angewandte Mathematik und Physik ZAMP56 (2005), 630–644. doi:10.1007/s00033-004-3073-4.
LoretiP.RaoB., Optimal energy decay rate for partially damped systems by spectral compensation, SIAM Journal on Control and Optimization45(5) (2006), 1612–1632. doi:10.1137/S0363012903437319.
26.
PazyA., Semigroups of Linear Operators and Applications to Partial Differential Equations, Springer-Verlag, New York, 1983.
27.
RayleighJ.W.S.B., The Theory of Sound, Dover Publications, New York, 1945.
28.
RiveraJ.E.M.RackeR., Large solutions and smoothing properties for nonlinear thermoelastic systems, Journal of Differential Equations127(2) (1996), 454–483. doi:10.1006/jdeq.1996.0078.
29.
RozendaalJ.SeifertD.StahnR., Optimal rates of decay for operator semigroups on Hilbert spaces, Advances in Mathematics346 (2019), 359–388. doi:10.1016/j.aim.2019.02.007.
30.
RussellD.L., A general framework for the study of indirect damping mechanisms in elastic systems, Journal of Mathematical Analysis and Applications173(2) (1993), 339–358. doi:10.1006/jmaa.1993.1071.
31.
VernotteP., Les paradoxes de la théorie continue de l’équation de la chaleur, Comptes Rendus Hebdomadaires des Séances de l’Académie des Sciences246 (1958), 3154–3155.