
Abstract
BACKGROUND:
Animal learning based on brain stimulation is an application in a brain-computer interface. Especially for birds, such a stimulation system should be sufficiently light without interfering with movements of wings.
OBJECTIVE:
We proposed a fully-implantable system for wirelessly navigating a pigeon. In this paper, we report a handheld neural stimulation controller for this avian navigation guided by remote control.
METHODS:
The handheld controller employs ZigBee to control pigeon’s behaviors through brain stimulation. ZigBee can manipulate brain stimulation remotely while powered by batteries. Additionally, simple switches enable users to customize parameters of stimuli like a gamepad. These handheld and user-friendly interfaces make it easy to use the controller while a pigeon flies in open areas.
RESULTS:
An electrode was inserted into a nucleus (formatio reticularis medialis mesencephalic) of a pigeon and connected to a stimulator fully-implanted in the pigeon’s back. Receiving signals sent from the controller, the stimulator supplied biphasic pulses with a duration of 0.080 ms and an amplitude of 0.400 mA to the nucleus. When the nucleus was stimulated, a 180-degree turning-left behavior of the pigeon was consistently observed.
CONCLUSIONS:
The feasibility of remote avian navigation using the controller was successfully verified.
Introduction
A brain-computer interface (BCI), which communicates with the nervous system through electronics, has advanced considerably in recent decades. Leveraging recorded neural signals as well as electrical stimulation into a brain, a BCI has been applied to a variety of medical devices, neuro-ergonomics, entertainments, and security applications [1,2].
Animal learning based on brain stimulation is one of the BCI applications. In conventional animal learning paradigms, animals are trained to behave specifically in response to external cues, such as sounds, and obtain rewards, such as food. In contrast, animal learning using brain stimulation removes physical constraints resulted from external cues and rewards because electrical stimuli can act as both virtual cues and rewards [3].
This animal learning approach has allowed researchers to control behaviors of distant animals, called intelligent robots or robo-animals [3,4]. Such robo-animals could be used in inaccessible locations to humans or mechanical robots, for example, as detectors to investigate disaster survivors. Electrical stimuli can be easily generated by operating a stimulator inserted into an animal’s body. Thereby, many researchers worldwide have successfully controlled freely-moving creatures such as birds, insects, fish, and reptiles as well as laboratory animals [5–8].
Among these creatures, a bird has a distinctive feature in navigating its location; a bird can fly a long distance. This allows birds, as robo-animals, to investigate a wider variety of locations including high places, and this also is the reason why bulky and percutaneous stimulation systems that have been used for other animals in previous studies may be unsuitable for birds. A stimulation system for avian navigation should be sufficiently light and located in a bird’s body without interfering with movements of wings. Hence, we have proposed a fully-implantable stimulation system for wirelessly navigating location of a bird, in particular a pigeon, as depicted in Fig. 1 [9].
The proposed stimulation system consists of a handheld neural stimulation controller and a fully-implantable stimulator. This fully-implantable stimulator is integrated with a stimulation circuit, a wireless transceiver, and a battery connected with a charger. Receiving control signals wirelessly sent from the handheld neural stimulation controller, the fully-implantable stimulator delivers electrical stimuli to electrodes inserted into a pigeon’s brain.
This paper focuses on the handheld neural stimulation controller for avian navigation guided by remote control (called HNS-controller, henceforth). To build a controller for remote avian navigation, handheld and user-friendly interfaces are required so that it can be handled by users while a bird flies in open areas. Additionally, to have these interfaces for such a controller, low-power but long-range wireless communication is necessary.
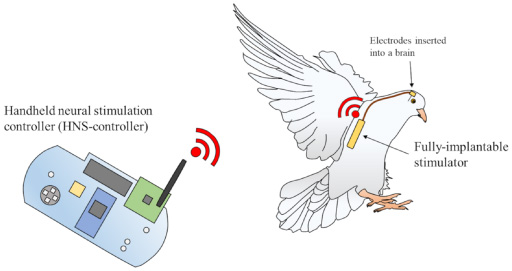
An illustration of the proposed fully-implantable stimulation system for remote avian navigation.
To achieve these requirements, ZigBee has been chosen for wireless communication between the HNS-controller and the fully-implantable stimulator. Not only does ZigBee consume lower power than Wi-Fi, it can also transmit data for a longer distance (up to 100 m in practice) in comparison to Bluetooth [10,11]. Owing to the use of ZigBee, the HNS-controller becomes a handheld by operating with batteries. Furthermore, the HNS-controller has a gamepad-like design comprised of simple switches to have user-friendly interfaces.
In this paper, details of the HNS-controller are demonstrated to show its fabrication methods with handheld and user-friendly interfaces. The functionality of the HNS-controller was evaluated in vivo, through percutaneous stimulation and remote navigation, as well as in vitro. Results of both in vivo experiments were compared in order to verify the feasibility of remote avian navigation using the HNS-controller as well.
Although the crucial function of the HNS-controller was ZigBee remote control of a fully-implantable stimulator, two more functions were added to use in following experiments; one was precise target positioning through a percutaneous link prior to implantation of a stimulator, and the other was inductive charging of a battery in an implanted stimulator. These functions will be explained briefly in this section.
Details of the HNS-controller
As described in Fig. 2a, the HNS-controller consists of a current stimulation application-specific integrated circuit (ASIC), a class-E power amplifier (PA), a ZigBee module, and a field-programmable gate array (FPGA). The HNS-controller can communicate with electrodes and a fully-implantable stimulator for percutaneous stimulation and remote avian navigation, respectively.
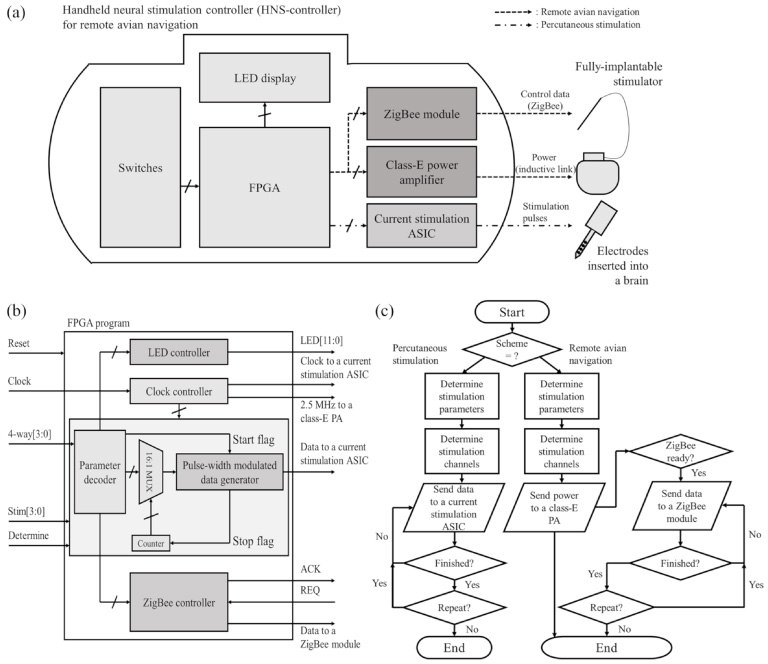
Diagrams of (a) the HNS-controller that can be used for both percutaneous stimulation and remote avian navigation, (b) an FPGA program for the HNS-controller, and (c) a flowchart of the FPGA program.
On the one hand, the current stimulation ASIC on the HNS-controller can be connected to electrodes inserted into a brain and supply biphasic pulses to neurons percutaneously. While the current stimulation ASIC generates biphasic pulses, the class-E PA and the ZigBee module on the HNS-controller are completely turned off. To fabricate the HNS-controller, a customized current stimulation ASIC was used [12]. This customized ASIC was designed to generate biphasic pulses on 16 output channels, in pulse rates, durations, and amplitudes of 20.00–226.0 Hz, 0.020–1.280 ms, and 0.010–10.23 mA, respectively. Though we used the customized ASIC in this study, one may replace it with commercial active elements [13–15].
On the other hand, the class-E PA and the ZigBee module can transmit power and data, respectively, to a fully-implantable stimulator wirelessly. While the class-E PA and the ZigBee module deliver power and data, the current stimulation ASIC is on standby, consuming less than 1 mW. The class-E PA can transfer enough power via an inductive link to charge a battery in a fully-implantable stimulator. This PA was constructed using a widely-used topology that has very high power transfer efficiency (100 % theoretically) while taking up small area [16,17]. In addition to the PA, the ZigBee module (CC2530, Texas Instruments, Inc., USA) can send control data including parameters of biphasic pulses to a fully-implantable stimulator. Using data wirelessly sent from this ZigBee module on the HNS-controller, a stimulation circuit in a fully-implantable stimulator can generate biphasic pulses corresponding to the data.
The FPGA on the HNS-controller has to communicate with all of these components comprising the HNS-controller. To realize this operation, an FPGA module (DLP-HS-FPGA-A, DLP Design, USA) was used. This FPGA module has 50 programmable pins, sufficiently large memories, and easy-to-program interfaces. A diagram and a flowchart of an FPGA program for the HNS-controller are depicted in Fig. 2b and Fig. 2c, respectively. Details of this program are outlined below.
Users have to choose one of the two operation schemes of the HNS-controller, either percutaneous stimulation or remote avian navigation, through the FPGA. It works as follows: 4-way [3:0] are responsible for a 4-way switch. After users select which parameter of biphasic pulses to be varied by horizontal movements of the 4-way switch, they can change values of each parameter by its vertical movements. In the meantime, the corresponding values are presented on a light-emitting diode (LED) display through LED [11:0], and users can store these values in memories by triggering a button switch, named Determine. Subsequently when one of the four button switches, named Stim [3:0], is triggered, control data including all the values are delivered to the current stimulation ASIC or the ZigBee module in accordance with an operation scheme chosen at the beginning. Especially for remote navigation, ACK and REQ are declared and used to synchronize data communication between the FPGA and the ZigBee module.
Figure 3 shows a schematic of a fully-implantable stimulator designed for remote avian navigation. The customized current stimulation ASIC abovementioned was also used as a stimulation circuit in this fully-implantable stimulator. Using control data received by the ZigBee transceiver of the stimulator, this current stimulation ASIC can generate biphasic pulses and vary their parameters.
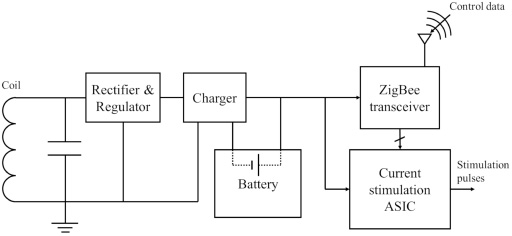
A schematic of a fully-implantable stimulator designed for remote avian navigation.
A battery powers the current stimulation ASIC and the ZigBee transceiver. However, due to limited capacity of a battery, it may be impossible to operate the stimulator permanently in vivo. To overcome this limitation, a coil and a charger are contained in the stimulator to build an inductive charging link. Further details of the fully-implantable stimulator are provided in [18].
In vitro evaluation on remote control of the fully-implantable stimulator using the HNS-controller was conducted to verify the functionality of the HNS-controller prior to in vivo evaluation. An electrode, whose impedance magnitude was measured to be 10 kΩ, was dipped in phosphate-buttered saline (PBS) solution (Gibco 10010, Invitrogen Life Technologies, USA) and connected to the stimulator. This PBS solution was used to mimic in vivo-like environment. The HNS-controller sent control data of biphasic pulses with a duration of 0.100 ms and an amplitude of 0.200 mA to the stimulator. Biphasic pulses generated from the stimulator were measured by an oscilloscope (DPO4034, Tektronix, Inc., USA).
In vivo experiments were carried out for both percutaneous stimulation and remote avian navigation using the HNS-controller. To observe a turning behavior of a pigeon, its nucleus (formatio reticularis medialis mesencephalic, FRM) was targeted for stimulation [9]. The FRM was selected based on the recent study on electrical stimulation of motor-related brain nuclei of pigeons [8].
An adult pigeon (Columbia livia) was anesthetized with inhalational isoflurane. After positioning the pigeon’s head in a stereotaxic apparatus so that the eye-beak plane pointed 45 degrees below the horizontal plane, a reference point (bregma) was determined and holes were drilled in the skull above the target region. This motor-related region was targeted using the stereotaxic apparatus with precision based on [8]. Details will be reported in a future publication. The dura and the arachnoid were penetrated with a 27G needle. An electrode was then advanced to the target region along the penetration path. After implantation of the electrode, for percutaneous stimulation, the gap between the electrode and the cranium was closed using dental cement. On the other hand, for remote navigation, the electrode was connected through a biocompatible polyimide cable to a fully-implanted stimulator in the pigeon’s back, which had been packaged using liquid crystal polymer (LCP). Connections were sealed using dental cement, and all surgical wounds were closed with nylon sutures. In both in vivo experiments, biphasic pulses with a duration of 0.080 ms and an amplitude of 0.400 mA were applied to the target region repeatedly for 0.5 seconds using the HNS-controller. All experimental procedures performed in this study involving animals were in accordance with the ethical standards of the Institutional Animal Care and Use Committee of Seoul National University (SNU-170622-1).
Results
The HNS-controller and its characteristics
The current stimulation ASIC, the class-E PA, the ZigBee module, and the FPGA were mounted on a printed-circuit board (PCB) that resembles a gamepad, as shown in Fig. 4a. The user’s finger movements were considered in arrangement of switches to provide user-friendly interfaces like a gamepad. The HNS-controller also became handheld due to parallel-connected batteries shown in Fig. 4b. The dimension of the HNS-controller was 17.5 cm × 10.0 cm × 5.30 cm, and it weighed 141.8 g except for batteries.
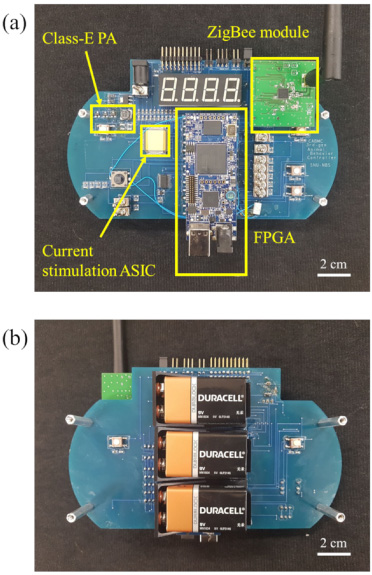
Photographs of (a) the top-view and (b) the bottom-view of the fabricated HNS-controller. Its dimension and weight were measured to be 17.5 cm × 10.0 cm × 5.30 cm and 141.8 g except for batteries, respectively.
As shown in Fig. 5a, the HNS-controller wirelessly transmitted control data via ZigBee to an unpackaged fully-implantable stimulator. This stimulator received these data and successfully supplied biphasic pulses to an electrode, with an impedance magnitude of 10 kΩ, dipped in PBS solution. These biphasic pulses were measured by the oscilloscope, and one of them was plotted as depicted in Fig. 5b. The measured pulse featured a duration of 0.100 ms, which conformed to the parameters preset by the HNS-controller for this evaluation. When the impedance of the electrode was considered, a peak voltage generated by the biphasic pulses with an amplitude of 0.200 mA should be ±2 V. Though the measured peak voltage was close to ±2 V, the pulse in Fig. 5b was slightly distorted because it was supplied in PBS solution.

(a) A photograph of in vitro evaluation for remote control of a fully-implantable stimulator (unpackaged) using the HNS-controller and (b) one of biphasic pulses generated from the fully-implantable stimulator in PBS solution.
An electrode connected to the HNS-controller was inserted into the FRM region of a pigeon, and biphasic pulses were delivered through the electrode. Responding to one percutaneous stimulation, the pigeon showed a 180-degree turning-left behavior lasting 2.5 seconds, as shown in Fig. 6.
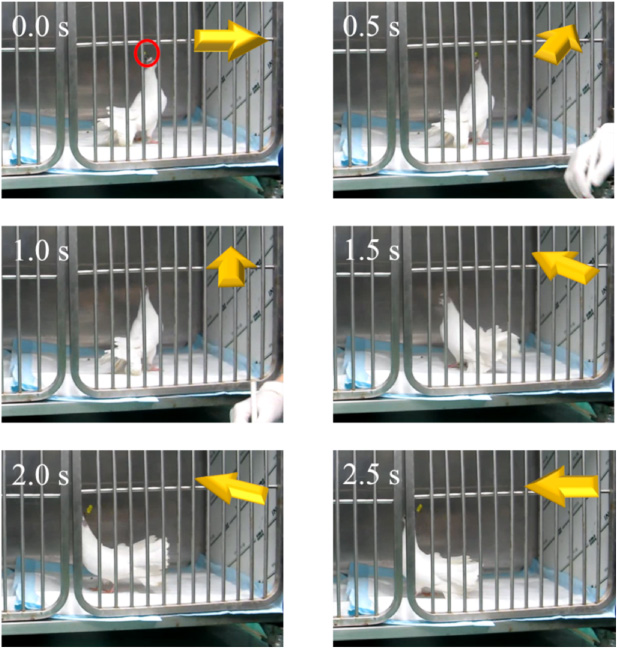
Photographs of a pigeon’s turning-left behavior induced by percutaneous stimulation on the FRM region. These photographs show successive time flow for 2.5 seconds. The red circle indicates a percutaneous link that connects the HNS-controller to an electrode inserted into the target region.
The same electrode was inserted into the target region of a pigeon and connected to an LCP-packaged stimulator fully-implanted in the pigeon’s back. After this stimulator received control data wirelessly sent from the HNS-controller, biphasic pulses were generated from the stimulator and delivered to the electrode. As shown in Fig. 7, responding to the stimulation with the same parameters as in the case of percutaneous stimulation, the pigeon showed the 180-degree turning-left behavior lasting 2.5 seconds.
Herein, we developed the HNS-controller, the handheld neural stimulation controller for avian navigation guided by remote control. To realize such avian navigation in open areas, handheld and user-friendly interfaces of the HNS-controller were considered thoroughly. The HNS-controller was designed to resemble a gamepad that can be comfortably held by users and provide user-friendly experiences using simple switches. In addition, the HNS-controller became handheld by operating with batteries. Its estimated operating time would be 25.86 hours, more than a day, with three parallel-connected batteries, each of which has a nominal capacity of 1000 mAh.
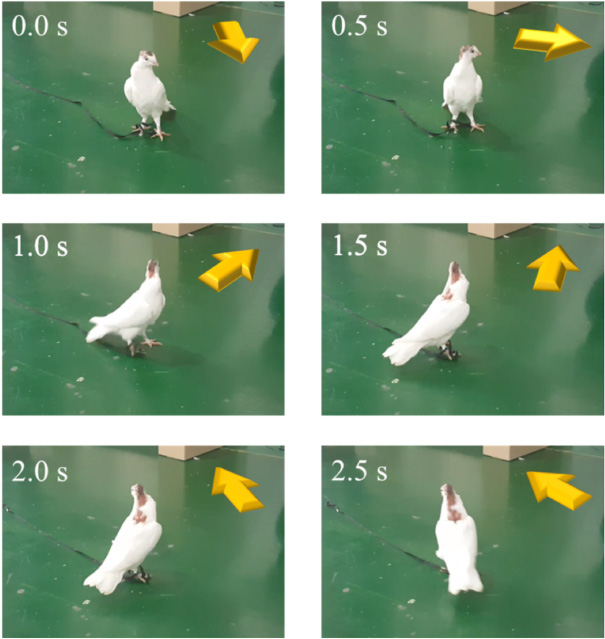
Photographs of a turning-left behavior of a pigeon induced by remote navigation using the HNS-controller. These photographs also show successive time flow for 2.5 seconds. The black wire on the bottom was tied to the pigeon’s leg, restraining the pigeon not to run away in open areas.
The functionality of the HNS-controller was evaluated in vivo as well as in vitro. In vitro evaluation, the fabricated fully-implantable stimulator wirelessly received control data of biphasic pulses preset by the HNS-controller and generated biphasic pulses corresponding to the control data. Subsequently, the FRM region of a pigeon was stimulated in vivo through both percutaneous stimulation and remote navigation using the HNS-controller. Each pigeon in both in vivo experiments responded to biphasic pulses with the same parameters and showed the same 180-degree turning-left behavior lasting 2.5 seconds. Biphasic pulses with a duration of 0.080 ms and an amplitude of 0.400 mA were enough to stimulate the target region and observe 180-degree turning-left behaviors of pigeons.
Though the multi-functional properties of the HNS-controller were demonstrated briefly in this paper, these properties were helpful in the abovementioned experiments. The HNS-controller supplied biphasic pulses using the current stimulation ASIC on it. This function was used not only to precisely position a target nucleus prior to implantation of the LCP-packaged stimulator, but also to stimulate the target region percutaneously. Furthermore, the HNS-controller wirelessly charged a battery in the stimulator using the class-E PA connected to an inductive link. Due to limited capacity of a battery, this function of inductive charging was necessary to operate the stimulator normally in vivo for a long time. These multiple functions of the HNS-controller were achieved based on an FPGA. Parallel execution of an FPGA helped the HNS-controller to process its entire operation relatively fast and accurately.
For complete navigation of a freely-moving bird, further studies are required. In our previous study, the intercollicularis (ICo) region of a pigeon was also stimulated percutaneously, and a taking-off behavior was induced [19]. In a similar manner, experiments on stimulation of the periaqueductal gray (PAG) region, related to a moving-forward behavior, are being conducted. So far, the proposed fully-implantable stimulation system has been applied only to control a turning-left behavior of a pigeon. The feasibility of the proposed fully-implantable stimulation system must be verified for different behaviors as well. Furthermore, in the future, multi-region and simultaneous stimulation may be necessary to control complex behaviors of a bird such as a turning-left behavior while a bird takes off or moves forward. To elicit these complex behaviors, more improvements on the HNS-controller will be required to transmit larger amount of data with higher data rate and accuracy to a multi-channel fully-implantable stimulator connected to multiple electrodes.
A handheld neural stimulation controller was developed to use in avian navigation guided by remote control. With ZigBee wireless communication, this controller becomes handheld as it operates with batteries which last more than a day. In addition, simple switches make it easy to use the controller like a gamepad. Because of these handheld and user-friendly interfaces of the controller, users can manipulate it while a bird flies in open areas. The functionality and the feasibility of remote avian navigation using the controller were successfully evaluated in vivo. When the target nucleus was stimulated by remote control, the 180-degree turning-left behavior of a pigeon were consistently observed as the pigeon responded to percutaneous stimulation on the target nucleus. In the future, the controller will be improved for complete avian navigation through remote control of pigeon’s complex behaviors by stimulating multiple brain regions simultaneously.
Footnotes
Acknowledgements
This work was supported by a grant from CABMC funded by the Defense Acquisition Program Administration (UD170030ID).
Statement on animal welfare
All experimental procedures performed in this study involving animals were in accordance with the ethical standards of the Institutional Animal Care and Use Committee of Seoul National University.
Conflict of interest
S. Shim, S. Yun, S. Kim, G.J. Choi, C. Baek, J. Jang, Y. Jung, J. Sung, J.H. Park, K. Seo, J.M. Seo, Y.K. Song, and S.J. Kim declare that they have no conflict of interest in relation to the work in this paper at the time of this writing.