
Abstract
This paper introduces a new approach for monitoring and system identification of suspension bridges. The methodology is based on the theoretical formulation of the dynamic response of a suspension bridge and its components. The vibration records are used to identify the boundary conditions and the unknown coefficients in the equations. The goal is to identify the forces in the main components of the bridge, rather than its modal properties. By proper placement of right-type of sensors, it is possible to identify the time-varying forces on the main suspension cables, hangers, towers, and the deck from the records.
Introduction
The standard approach for vibration monitoring and system identification of suspension bridges is to install sensors on key components of the bridge (e.g., pylons, deck, and the cables), and analyse the records to identify the modal characteristics (e.g., modal frequencies, damping ratios, and mode shapes) of the vibrations. Calibrated analytical models of the bridge are developed by matching the identified modal properties.
Due to their large size, geometric nonlinearities, non-proportional damping, and moving traffic loads, most suspension bridges do not meet the requirements and assumptions of classical modal analysis. Also, since there are an infinite number of modes, it is not possible to identify all of them and to develop a single model that match the recorded data.
This paper presents an alternative approach for monitoring and system identification of suspension bridges. The objective is to identify the physical parameters of the response, such as the axial forces in the main suspension cables, axial forces in the hangers, forces and moments in the pylons, and the flexibility of the suspended deck.
Components and dynamic response of suspension bridges
The main components of a suspension bridge are the suspension cables, pylons, the deck, and the hangers that connect the deck to the suspension cables. Theoretically, the bridge is a single dynamic system because of the interaction among the components. However, due to the differences in their flexibilities and the degrees of freedom, the response of some of the components can be studied independently by separating the frequency bands (i.e., by band-pass filtering) in the records that are pertinent only to the vibrations of that component.
In the following sections, we present the analytical expressions for the static and dynamic response of each main component of the bridge. The analytical expressions are based on the assumption of first-order approximation and linear behaviour. These expressions can be used to calculate the dynamic forces in the cables, the deck, hangers, and the pylons. Identified forces provide a good starting values for the development of more accurate nonlinear models for the bridge, which can match the recorded response much better than those developed based on modal properties.
Cables
The two main suspension cables can be modelled as an elastic cable with uniform cross-section subjected to axial tension H, and a uniformly distributed vertical load p, as shown in Fig. 1. The vertical load p represents the sum of the cable weight plus the weight of the deck and the hangers. When held at the same elevation at both ends, such cables sag into a catenary, whose vertical profile can be expressed analytically in terms of hyperbolic cosine (cosh) functions. For shallow catenaries, where L/d > 8 (see Fig. 1), the axial tension in the cable is approximately constant, and the vertical profile w (x) can be approximated by a shallow parabola, as given below [1]:
p: Uniform load (dead + live load) per unit length of the cable.
H: Mean tension force on the cable.
L, d: Cable span and midspan sag.
d ≤ L/8 (shallow catenary)
The measure of sag is defined by the following parameter:

Notation and the loads for the cables.
The maximum sag at midspan:
Assuming that: (1) the cable profile is a shallow catenary, (2) longitudinal (i.e., x direction in Fig. 1) components of the motion are negligible, and (3) the second order terms can be neglected, the natural frequencies of the cable can be calculated from the following equations [2, 3]:
In vertical-plane, symmetric mode:
Note that as α2 → 0, λ i → 1, and as α2 → ∞ , λ i → 2.86
In vertical-plane, antisymmetric mode:
Out-of vertical-plane mode:
The first order dynamic component of the cable force, H d , is calculated as [2]:
Backstay cables are the cables spanning between the pylon tops and the ground anchorages at both ends of the bridge. Typically, these sections do not include hangers, as the decks in these parts are carried by concrete columns.
Figure 2 shows the sketch of a typical backstay cable, and the notations and dimensions. The distributed load, q = mg, represents the weight of the cable, where m is the cable mass per unit length and g is the gravitational acceleration.
Again, we assume first-order linear behavior and uniform cross-section subjected to axial tension H b . Note that H b is different than H (i.e., the axial force on centre cables) because of the different angles of slope with respect to the pylon, and the friction between the cable and the saddle at the top of the pylon.
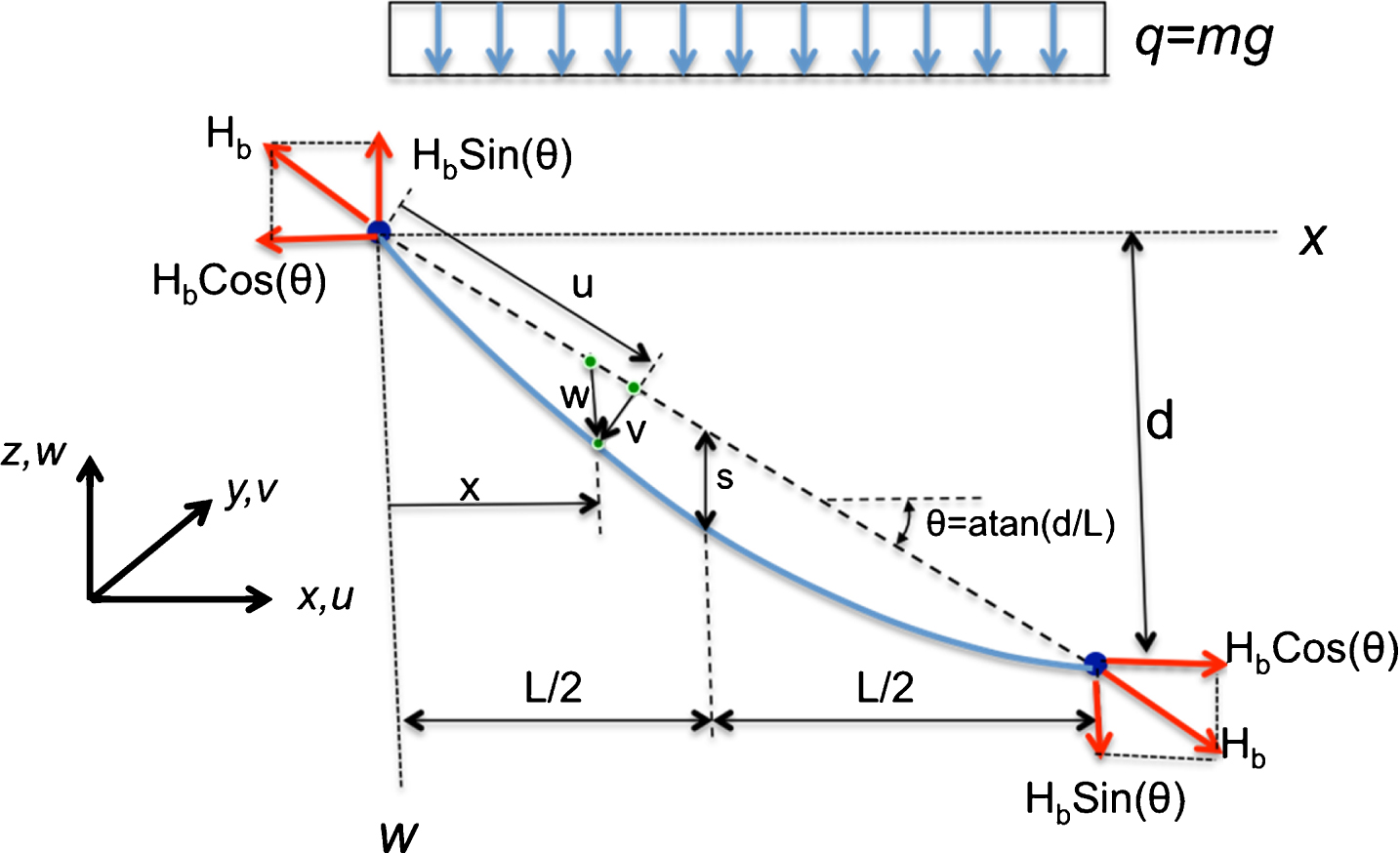
Sketch and the notation for a backstay cable.
By using the notation in Fig. 2, the following can be written for the static configuration of the backstay cable [1]:
Static vertical profile:
The sag at mid-point:
Length of backstay cable with sag:
The elongation of the cable:
The corresponding change in sag:
The natural frequencies of the in-plane and out-of-plane vibrations of a backstay cable can be estimated from the following equations [2, 3]
In vertical-plane, symmetric mode:
λ
i
is found by solving the equation:
Note that as
In vertical-plane, antisymmetric mode:
Out-of vertical-plane (i.e., swing) mode:
Vertical deck vibrations
A simple, first-order linear elastic model for the deck is a beam on elastic foundation, as shown in Fig. 3. The springs in the elastic foundation represent the vertical flexibility of the suspension cables and the hangers.
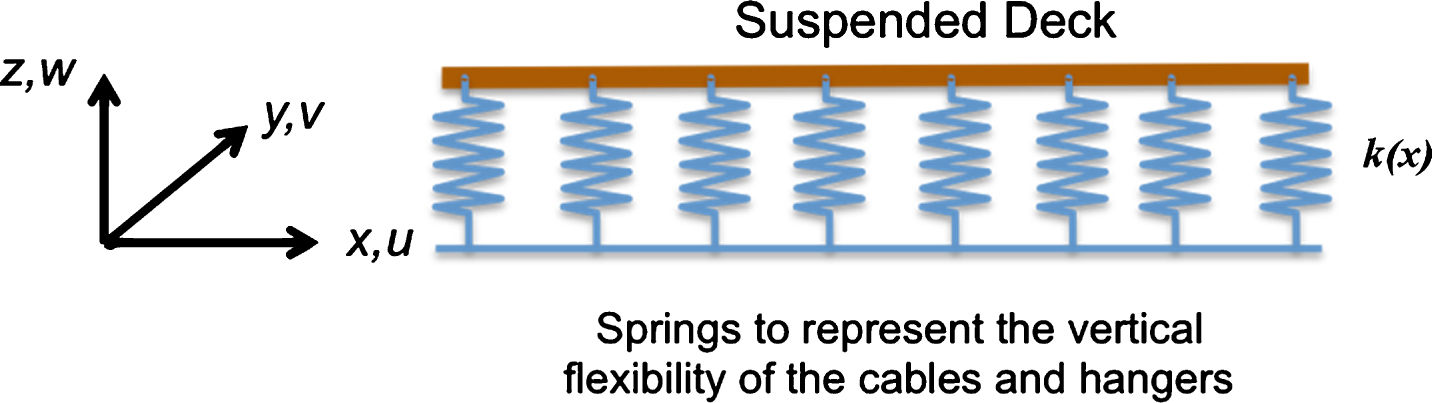
The deck modeled as a beam on elastic foundation.
Assuming that the spring stiffness k (x) is approximately constant (k ≈ k (x)), along the deck, the natural frequencies of the vertical vibrations are [5, 6, 5, 6]:
E, I, m: Modulus of elasticity, moment of inertia, and mass per unit length of the deck.
k (x): Spring stiffness (i.e., main cable and hanger stiffness) per unit length of the deck.
x k , F k : Location and magnitude of live load on the deck.
Assuming that hangers are always in tension, and using the notation in Fig. 4, the equations for torsional vibrations of a deck segment can be written as follows:
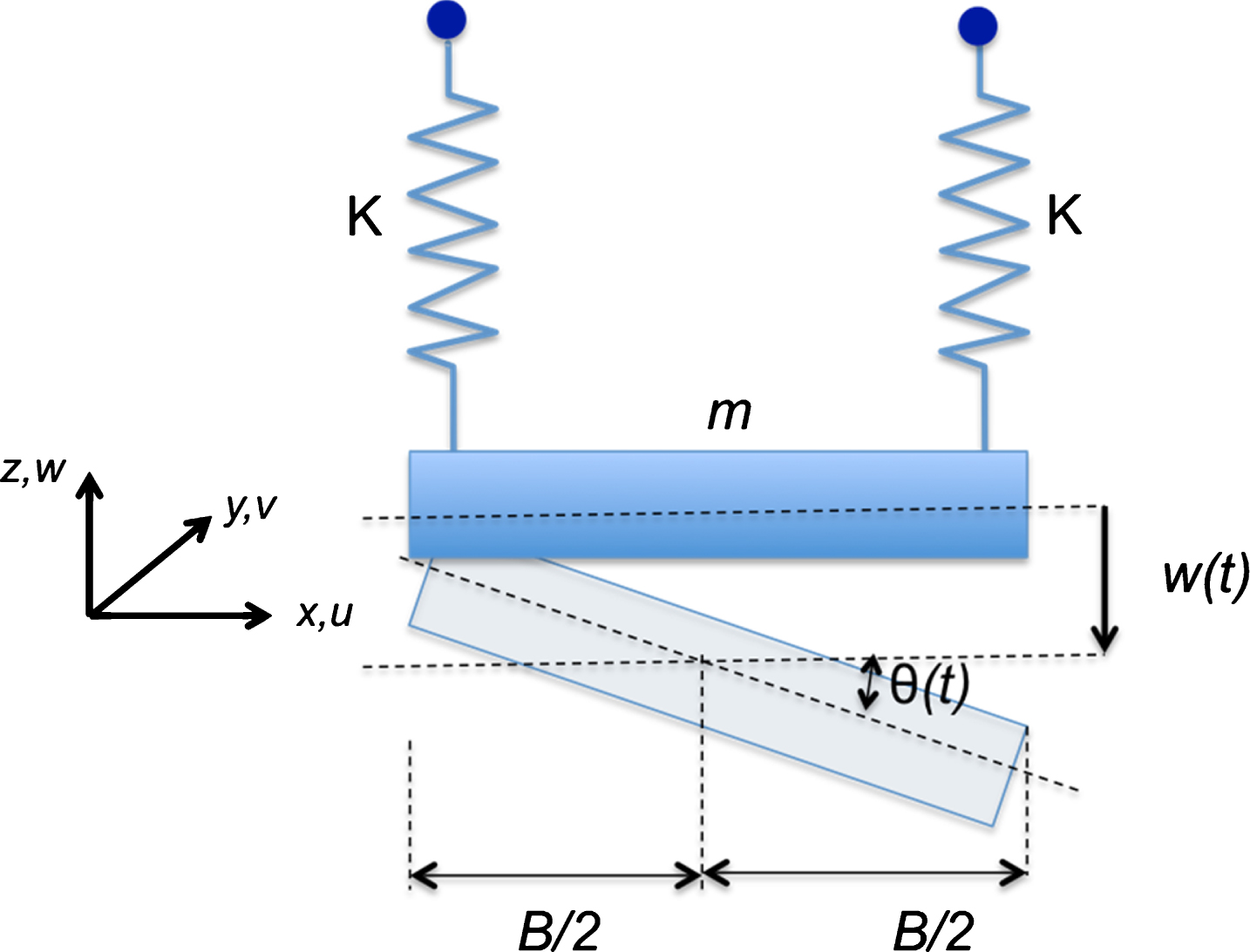
Torsional vibrations of the deck.
θ = θ (t): Rotation with respect to the center-line of the deck
w = w(t): Vertical displacement of the center-line of the deck
k = Vertical stiffness of main cables
m = Mass of the deck per unit length
c θ , c y = Damping for rotation and vertical translation
f(t) = External dynamic load (e.g., wind turbulence) on the deck
For small rotations (i.e., cos(θ) ≈1 and sin(θ) ≈ θ):
It should be noted that for a large initial torsional push (e.g., large initial θ (0) value), which can happen in sudden and strong wind storms, this approximation may grossly underestimate θ (t). For small rotations, the local torsional natural frequency of the deck segment is:
Pylons of a suspension bridge are basically cantilever beams subjected to large axial compression forces. The i’th natural frequencies of such a cantilever is given by the following equation [6]:
P b = π2EI/(4h2) (Buckling load of the pylon)
P = Axial compression load on the pylon
h,EI = Height and the flexural rigidity of the pylon
For hangers with L
h
/ D > 100, where L
h
is the free hanger length (after the sockets) and D is the hanger diameter, the hangers can be assumed to behave like a taut string. For a taut string, the relationship between the hanger force N
h
and the i’th natural frequency, f
i
, are given by the following equations [2, 4]
f
i
= i ’ th modal frequency of hanger in Hz; i = 1, 2, … … , ∞ N
h
= Hanger load in kN m
h
= Hanger mass per unit length in kg/m L
h
= Hanger length in meters.
The equation indicates that the hanger has an infinite number of modes and they are all integer multiples of the first mode, that is:
In other words, the difference between any two successive modal frequencies in the spectrum should be equal to the first modal frequency (i.e., fi+1 - f i = f1).
For short hangers, where Lh/ D < 100, the end conditions and bending deformations influence the natural frequency. In such cases, the natural frequencies are calculated by considering the hanger as a thin beam subjected to axial tension. Natural frequencies of such beams for various end conditions can be found in [6].
The dynamic behavior of the main components (i.e., the cables, pylons, the deck, and the hangers) of a suspension bridge can be approximated fairly accurately by analytical models. Theoretically, the recorded vibrations of a suspension bridge represent data from a single dynamic system because of the interaction among the components. However, due to the differences in their flexibilities and the degrees of freedom, the dynamic characteristics of the main components of the bridge can be identified independently by studying specific frequency bands (i.e., by band-pass filtering) in the records that are pertinent only to the vibrations of that component.
This paper presents analytical expressions for the static and dynamic response of each main component of the bridge. The equations are based on the assumption of first-order approximation and linear behaviour. These expressions can be used to calculate the dynamic forces in the cables, the deck, hangers, and the pylons. They provide good starting values for the development of more accurate nonlinear models for the bridge. Those models would match the recorded response much better than those developed based on the calibration with modal properties.