In this paper, the notion of M-fuzzifying restricted hull operators is introduced and several equivalent characterizations are given. It is shown that there is a one-to-one correspondence between M-fuzzifying restricted hull operators and M-fuzzifying convex structures. As applications, some properties of the cut convex structures of an M-fuzzifying convex structure and of M-fuzzifying convexity preserving functions and of M-fuzzifying convex-to-convex functions are derived. In addition, using M-fuzzifying restricted hull operators, some M-fuzzifying convexities are naturally constructed from M-fuzzy quasi-orders.
Convexity, which is a simple notion inspired by the shape of some figures, such as circles and polyhedrons (convex) in our ordinary 2 or 3-dimensional space, has an old history and numerous applications [2]. Since early decades of last century, the notion of convexity has been extended to more mathematical structures. For example, the well-known Helly’s, Carathéodory’s and Radon’s theorems for convex sets in Euclidean space capture some combinatorial features of convexity and are helpful when handling convex combinations [5, 13]. Order convexities on partially ordered sets and convexities in metric spaces especially in graphs were studied extensively [3, 24]. The results on convex sets and convex functions play an important role in functional analysis and in optimization theory [1, 17]. From the early fifties of last century on, an axiomatic approach of convexity started to develop. Thisdevelopment was motivated not only by the need for an abstract theory of convexity generalizing the classical theorems in Rn due to Helly, Carathéodory etc., but also by the necessity to unify geometric aspects of all these mathematical structures. The interplay between the axiomatic approach and various structures turned out to be particularly fruitful. A wide variety of general results have been derived under the axiomatic framework (see the monograph of M. van de Vel [25]).
Abstractly, a convexity on a set X is defined to be a family of subsets of X which contains both X itself and the empty set ∅ and which is closed under arbitrary intersections and nested unions (see Definition 2.2). A convex structure is completely determined by its hull operator, or even by its effect on finite sets (this last because of domain finiteness). Therefore, convexities are often classified by the properties of the hull operator. This is the case, for instance, with matroids, with convex geometries (anti-matroids) and with Join-hull Commutative (JHC) convexities. Further, there is a simple axiomatic characterization of the hull operator on the collection of finite sets [25]. In 1994, Rosa generalized the notion of convex structures to fuzzy setting in [18]. In 2009, Maruyama introduced an L-fuzzy convexity space in [14] where was defined as a crisp family of L-fuzzy subsets of a set X satisfying certain axioms. Also, the classical theorems of Helly, Carathéodory and Radon were extended to the lattice-valued fuzzy case. More recently, a new approach to the fuzzification of convex structures was introduced in [23]. It is called an M-fuzzifying convex structure, in which each subset of X can be regarded as a convex set to some degree. And as expected, M-fuzzifying convex structure can be characterized by its M-fuzzifying hull operator (called closure operator in [23]), or even by its effect on finite sets. In view of the importance of hull operators, in this paper, we study the characterizations of an M-fuzzifying hull operator when it is restricted to the collection of finite sets.
This paper is organized as follows. In Section 2, some basic properties and notions of lattices, convex structures and M-fuzzifying convex structures are provided. In Section 3, M-fuzzifying restricted hull operators are defined and some fundamental properties are discussed. In Section 4, the notion of M-fuzzifying betweennesses is introduced and is used to characterize the M-fuzzifying convexity preserving functions. Finally, conclusions and some perspectives are made.
Preliminaries
Throughout this paper, (M, ∨ , ∧ , ′) denotes a completely distributive lattice with an order-reversing involution ′ . The smallest element and the largest element in M are denoted by ⊥ and ⊤, respectively. The set of non-unit prime elements in M is denoted by P (M) . The binary relation ≺ in M is defined as follows: for a, b ∈ M, a ≺ b if and only if for every subset D ⊆ M, the relation b ≤ sup D always implies the existence of d ∈ D with a ≤ d [8]. {a ∈ M : a ≺ b} is called the greatest minimal family of b in the sense of [27], denoted by β (b) . Moreover, we define a binary relation ≺op as follows: for a, b ∈ M, a ≺ opb if and only if for every subset D ⊆ M, the relation inf D ≤ b always implies the existence of d ∈ D with d ≤ a . Then {a ∈ M : a ≺ opb} is the greatest maximal family of b in the sense of [27], denoted by α (b) . In a completely distributive lattice M, there exist α (b) and β (b) for each b ∈ M, and b = ⋁ β (b) = ⋀ α (b) (see [26]).
We denote the set of all subsets (resp., all finite subsets) of a set X by 2X (resp., ) and denote the interval [0, 1] of real numbers by I .
Theorem 2.1. [26] Let M be a completely distributive lattice and let {ai : i ∈ Ω} ⊆ M . Thenthat is, α is a ∧-∪ mapping and β is a union-preserving mapping.
Definition 2.2. [25] A family is called a convexity on a set X if the following conditions hold.
(C1)
(C2) If is non-empty, then
(C3) If is non-empty and totally ordered by inclusion, then
The pair is called a convex structure. The members of are called convex sets.
Let be a family of convexities on a set X . Its intersection and join are denoted by and respectively.
Theorem 2.3. [25] Let be an operator satisfying the following conditions.
(H1) h (∅) = ∅ .
(H2) F ⊆ h (F) for each
(H3) For all if G ⊆ h (F) then h (G) ⊆ h (F) .
Then there is precisely one convexity on X with a hull operator equal to h on Conversely, the hull operator of any convexity on X satisfies the conditions (H1) – (H3) .
Remark 2.4. (i) In Theorem 2, the unique convexity on X with a hull operator equal to h on is given by Therefore, once a mapping satisfies the conditions (H1) – (H3) , we have For this reason, we call such mappings restricted hull operators.
(ii) It is easily seen that if and only if h1 ≤ h2 (i.e., h1 (F) ≤ h2 (F) for all ).
Definition 2.5. [25] Betweenness is a binary relation between X and satisfying the following conditions.
(B1) No point is between the empty set.
(B2) If x ∈ F then x is between F .
(B3) If x is between G and if each element of G is between F, then x is between F .
Definition 2.6. [22] Denote the set of all M-fuzzy sets on X by MX . Let A ∈ MX and a ∈ M . Define
Some properties of these cut sets can be found in [11, 19–22].
For a ∈ M and D ⊆ X, we define an M-fuzzy set a ∧ D as follows:
Definition 2.7. [23] A mapping is called an M-fuzzifying convexity on X if it satisfies the following conditions:
(MYC1)
(MYC2) If {Ai : i ∈ Ω} ⊆2X is non-empty, then
(MYC3) If {Ai : i ∈ Ω} ⊆2X is non-empty and totally ordered by inclusion, then
If is an M-fuzzifying convexity on X, then the pair is called an M-fuzzifying convex structure.
Theorem 2.8. [23] Let be a mapping. Then the following statements are equivalent.
is an M-fuzzifying convex structure.
For each is a convex structure.
For each is a convexstructure.
Theorem 2.9. [23] Let be an M-fuzzifying convex structure. Let be the mapping defined, for all A ⊆ X and x ∈ X, byThen, for A ⊆ X, x ∈ X, has the following properties:
(MCO1)
(MCO2) If x ∈ A, then
(MCO3) If x ∉ A, then
(MDF)
Conversely, let co : 2X → MX be a mapping satisfying (MCO1) – (MCO3) and (MDF) . Define the mapping byThen is an M-fuzzifying convex structure. And as expected,
Remark 2.10. The operator defined by (2) in Theorem 2.9 is called the M-fuzzifying hull operator for the M-fuzzifying convex structure Based on this theorem, a mapping from 2X to MX will be called an M-fuzzifying hull operator if it satisfies the conditions (MCO1) – (MCO3) and (MDF) .
Theorem 2.11. [23] Let be an M-fuzzifying convex structure. Then
Remark 2.12. By Theorems 2.9 and 2.11, we obtain that for any M-fuzzifying convex structure and A ⊆ X,
Definition 2.13. [23] Let and be M-fuzzifying convex structures. A function f : X → Y is said to be:
An M-fuzzifying convexity preserving function provided for all B∈ 2Y ;
An M-fuzzifying convex-to-convex function provided for all A∈ 2X ; and
An M-fuzzifying isomorphism if f is a bijection, an M-fuzzifying convexity preserving function and an M-fuzzifying convex-to-convex function.
Definition 2.14. [28] Let X be a non-empty set. A mapping e : X × X → M is called an M-fuzzy quasi-order on X if it satisfies the following conditions:
(E1) ∀x∈ X, e (x, x) = ⊤ ;
(E2) ∀x, y, z ∈ X, e (x, y) ∧ e (y, z) ≤ e (x, z) . If e satisfies the additional condition
(E3) ∀x, y ∈ X, e (x, y) = e (y, x) = ⊤ ⇒ x = y,
then it is called an M-fuzzy partial order on X .
The pair (X, e) is called an M-fuzzy partially ordered set provided e is an M-fuzzy partial order on X .
Definition 2.15. [6] A function is called an ultrametric (or non-Archimedean metric) on X, if for all x, y, z ∈ X, there holds:
(UD1) d (x, y) =0 if and only if x = y ;
(UD2) d (x, y) = d (y, x) ;
(UD3) d (x, z) ≤ max {d (x, y) , d (y, z)} .
An ultrametric space (X, d) is a set X equipped with an ultrametric d .
M-fuzzifying restricted hull operators
First, we generalize the notion of restricted hull operators to M-fuzzy setting.
Definition 3.1. A mapping is called an M-fuzzifying restricted hull operator if it satisfies the following conditions.
(MH1) For all x ∈ X, h (∅) (x) = ⊥ .
(MH2) If then h (F) (x) = ⊤ .
(MH3) For all and x ∈ X,
It is easy to show that when M = {⊥ , ⊤} the conditions (MH1) – (MH3) are equivalent to the conditions (H1) – (H3) . Now we give characterizations of an M-fuzzifying restricted hull operator.
Theorem 3.2.The following statements are equivalent for a mapping
h is an M-fuzzifying restricted hull operator.
For each is arestricted hull operator, where h[a] (F) = (h (F)) [a] for all
For each is arestricted hull operator, where h[a] (F) = (h (F)) [a] for all
For each is a res-tricted hull operator, where h(a) (F) = (h (F)) (a) for all
If β (a ∧ b) = β (a) ∩ β (b) for any a, b ∈ M, then we can add the following equivalent statement.
For each is arestricted hull operator, where h(a) (F) = (h (F)) (a) for all
Proof. (i) ⇒ (ii). By (MH1) and (MH2) , it is easy to show that for all a∈ M \ {⊥} , h[a] (∅) = ∅ and h[a] (F) ⊇ F . Now let and G ⊆ h[a] (F) . Then ⋀y∈Gh (F) (y) ≥ a . If x ∈ h[a] (G) , then by (MH3) , h (F) (x) ≥ h (G) (x) ⋀ [⋀ y∈Gh (F) (y) ] ≥ a, which implies x ∈ h[a] (F) . Thus h[a] (G) ⊆ h[a] (F) , and so h[a] satisfies (H3) . Therefore, h[a] is a restricted hull operator.
(ii) ⇒(i). If h (∅) (x) = a ≠ ⊥ for some xinX, then x∈ (h (∅)) [a] = h[a] (∅) = ∅ ; a contradiction. To show (MH2) , let x ∈ F, but h (F) (x) = b ≠ ⊤ . Then there exists a ∈ M \ {⊥} such that anleqb . Thus x ∉ h[a] (F) , contradicting F ⊆ h[a] (F) . To show (MH3) , let and a ≤ h (G) (x) ⋀ [⋀ y∈Gh (F) (y)] . Then a ≤ h (F) (y) for all y ∈ G, which means G ⊆ h[a] (F) . Since h[a] is a restricted hull operator, it follows that h[a] (G) ⊆ h[a] (F) . Note that a ≤ h (G) (x) , that is, x ∈ h[a] (G) . Thus x ∈ h[a] (F) , i.e., a ≤ h (F) (x) . Since a is arbitrary, we conclude that h satisfies (MH3) .
(i) ⇒(iii). By (MH1) , h (∅) (x) = ⊥ for all x ∈ X . Thus, if a ∈ α (⊥) , then h[a] (∅) = {x : a ∉ α (h (∅) (x))} = ∅ . Thus h[a] satisfies (H1) . Noting that α (⊤) = ∅ , it follows from (MH2) that h[a] (F) ⊇ F . We now prove that h[a] satisfies (H3) . Let and G ⊆ h[a] (F) . Then for all y ∈ G, a ∉ α (h (F) (y)) , and thus a ∉ ⋃ y∈Gα (h (F) (y)) . Thus, if x ∈ h[a] (G) , i.e., a ∉ α (h (G) (x)) , then
By (MH3) , a ∉ α (h (F) (x)) , i.e., x ∈ h[a] (F) . Hence h[a] (G) ⊆ h[a] (F) , and so h[a] satisfies (H3) .
(iii)⇒(i). If h (∅) (x) = b ≠ ⊥ for some x ∈ X, then there exists a ∈ α (⊥) \ α (b) . Thus x∈ h[a] (∅) = ∅ ; a contradiction. Thus (MH1) holds. If ⋀x∈Fh (F) (x) = b ≠ ⊤ , then ∅ ≠ α (b) ⊆ α (⊥) . Let a ∈ α (b) = ⋃ y∈Fα (h (F) (y)) . Then a ∈ α (h (F) (y)) for some y ∈ F, and hence y ∈ F \ h[a] (F) , which contradicts the fact that F ⊆ h[a] (F) . Thus (MH2) holds. Note that a ≤ b if and only if α (b) ⊆ α (a) . To prove (MH3) , it is enough to show that α (h (F) (x)) ⊆ α (h (G) (x) ⋀ [⋀ y∈Gh (F) (y)]) . Let a ∈ α (h (F) (x)) . Then x ∉ h[a] (F) . Since h[a] is a restricted hulloperator, either G ⊈ h[a] (F) or x∉ h[a] (G) ; equiva-lently, either a ∈ α (h (F) (y)) for some y ∈ G ora ∈ α (h (G) (x)) . Therefore, a ∈ α (h (G) (x)) ⋃ [⋃ y∈Gα (h (F) (y))] = α (h (G) (x) ⋀ [⋀ y∈Gh (F) (y)]) as desired.
(i)⇒(iv). Let a ∈ P (M) . We show that h(a) is a restricted hull operator. (H1) and (H2) are easy to prove. To show that h(a) satisfies (H3) , let and G ⊆ h(a) (F) . Then h (F) (y) nleqa for all y ∈ G . Now let x ∈ h(a) (G) (i.e., h (G) (x) nleqa). Since a ∈ P (M) , we have h (G) (x) ⋀ [⋀ y∈Gh (F) (y) ] nleqa . It follows by (MH3) that h (F) (x) nleqa . Thus h(a) (G) ⊆ h(a) (F) , and hence (H3) holds.
(iv)⇒(i). If h (∅) (x) = b ≠ ⊥ = ⋀ P (M) for some x ∈ X, then there exists a ∈ P (M) with bnleqa . Thus x∈ h(a) (∅) = ∅ ; a contradiction. Thus (MH1) holds. Since h(a) is a restricted hull operator for every a ∈ P (M) , it follows that F ⊆ h(a) (F) for all and a ∈ P (M) . Therefore, for every a ∈ P (M) , if x ∈ F, then x ∈ h(a) (F) , i.e., h (F) (x) nleqa . Thus h (F) (x) = ⋀ {a ∈ P (M) : h (F) (x) ≤ a} = ⋀ ∅ = ⊤ , that is, (MH2) holds. To prove that h satisfies (MH3) , we assume the contrary letting G and F be finite subsets of X such that h (G) (x) ⋀ [⋀ y∈Gh (F) (y)] nleqh (F) (x) for some x ∈ X . Thus there is an a ∈ P (M) such that for all y ∈ G, h (F) (y) nleqa and h (G) (x) nleqa, but h (F) (x) ≤ a . It follows that G ⊆ h(a) (F) and x ∈ h(a) (G) but x ∉ h(a) (F) , which contradicts the fact that h(a) is a restricted hull operator.
(i)⇒(v). Let a ∈ β (⊤) , we need show that h(a) is a restricted hull operator. By (MH1) , h (∅) (x) = ⊥ for all x ∈ X . Thus β (h (∅) (x)) = β (⊥) = ∅ . This shows that a ∉ β (h (∅) (x)) (i.e., x ∉ h(a) (∅)) for all x ∈ X . Hence h(a) (∅) = ∅ . By (MH2) , h (F) (x) =⊤ for all x ∈ F . Thus a ∈ β (⊤) = β (h (F) (x)) (i.e., x ∈ h(a) (F)) for all x ∈ F, that is, F ⊆ h(a) (F) . To show that h(a) satisfies (H3) , let and G ⊆ h(a) (F) . Then a ∈ β (h (F) (y)) for all y ∈ G . Now let x ∈ h(a) (G) , i.e., a ∈ β (h (G) (x)) . It follows by (MH3) that
Thus h(a) (G) ⊆ h(a) (F) , and so h(a) satisfies (H3) .
(v)⇒(i). The proof is routine and is omitted. □
Theorem 3.3.Let be an M-fuzzifying convex structure and be its M-fuzzifying hull operator. Then is an M-fuzzifying restricted hull operator.
Proof. By Theorem 2.9, satisfies (MH1) and (MH2) . Let and x ∈ X . It is clear that holds for x ∈ G ∪ F . We may now assume that x ∉ G ∪ F . By (MCO3) of Theorem 2.9,Observe that, for any A ⊇ F with x ∉ A, if G ⊈ A, then
Otherwise, G ⊆ A, and so Hence by the arbitrariness of A (with x ∉ A ⊇ F), (MH3) holds. □
In what follows, for a given M-fuzzifying convex structure we always denote the M-fuzzifying restricted hull operator by The operator is called the M-fuzzifying restricted hull operator of
Theorem 3.4.Let be an M-fuzzifying restricted hull operator. Then there is precisely one M-fuzzifying convexity on X with an M-fuzzifying hull operator equal to h on
Proof. Let be the mapping defined, for all A ⊆ X, by
We first show that is an M-fuzzifying convexity on X .
(MYC1) Since {x : x ∉ X} = ∅ , we conclude by (4), that By (MH1) ,
(MYC2) Let {Ai : i ∈ Ω} ⊆2X be non-empty. If x ∉ ⋂ i∈ΩAi, then there exists ix ∈ Ω such that x ∉ Aix . Thus
It follows from 4 that
(MYC3) Let {Ai : i ∈ Ω} ⊆2X be non-empty and totally ordered by inclusion. Note that for any and x ∉ ⋃ i∈ΩAi, there exists iF ∈ Ω such that and x ∉ AiF . Thus
It follows from 4 that
We show next that i.e. for all and x ∈ X .
In case x ∈ A, the equality holds obviously. Let x ∉ A . Then by Theorem 2.9 and (4), we have
By taking y = x, F = A for each B with x ∉ B ⊇ A, we see On the other hand, let We show that a ≤ h (A) (x) . If not, let Then From the above, we know Therefore, there exist and such that It follows from that By (MH3) , contradicting that This contradiction shows that a ≤ h (A) (x) . Since a is arbitrary, we have
Finally, the proof of the uniqueness part follows easily from (MDF) . □
In what follows, for a given M-fuzzifying restricted hull operator h, the unique M-fuzzifying convexity given in Theorem 3.4 (that is, the one defined by 4) is always denoted by
Remark 3.5. By Theorems 3.3 and 3.4, there is a one-to-one correspondence between M-fuzzifying restricted hull operators and M-fuzzifying convex structures. More precisely, for any M-fuzzifying convex structure there is an M-fuzzifying restricted hull operator such that Conversely, for any M-fuzzifying restricted hull operator h, there is an M-fuzzifying convex structure such that
Corollary 3.6.A mapping is an M-fuzzifying restricted hull operator if and only if it satisfies conditions (MH1) , (MH2) and the following condition. (MH3) ′ If and x ∈ X \ F, then
Proof. Necessity. We need only show that (MH3) ′ holds. By Theorem 3.4 we know Thus by Theorem 2.9,
Sufficiency. The proof of (MH3) is analogous to that in Theorem 3.3. □
Lemma 3.7.A mapping cl : 2X → MX is an M-fuzzifying hull operator if and only if it satisfies the conditions (MCO1) , (MCO2) , (MDF) and the following condition.
(MCO3) ′ For all A ∈ 2X and a ∈ M,
Proof. Necessity. We need only prove that (MCO3) ′ holds. It is clear from (MCO2) that cl (cl (A) [a]) [a] ⊇ cl (A) [a] . Conversely, by (MCO3) ,
Sufficiency. It suffices to show that (MCO3) holds. Let x ∉ A . Then for any B ⊇ A with x ∉ B, by (MDF) , cl (A) (x) ≤ cl (B) (x) ≤ ⋁ y∉Bcl (B) (y) . Therefore,Conversely, let a ≺ ⋀ x∉B⊇A [⋁ y∉Bcl (B) (y)] . If anleqcl (A) (x) , then x ∉ cl (A) [a] . Let By and so Hence there exists with It follows, by a contradiction. Hence a ≤ cl (A) (x) . By the arbitrariness of a, ⋀ x∉B⊇A [⋁ y∉Bcl (B) (y)] ≤ cl (A) (x) . Thus (MCO3) holds. □
Theorem 3.8.A mapping is an M-fuzzifying restricted hull operator if and only if it satisfies conditions (MH1) , (MH2) and the following condition.
(MH3) ″ If then
Proof. Necessity. Let h be an M-fuzzifying restricted hull operator. We need only verify that (MH3) ″ holds.
If p ≤ h (F) (x) , then x ∈ h (F) [p] . Let G = F ∪ {x} . By (MH2) , x ∈ h (G) [p] and Thus Since p, x are all arbitrary, we have
Conversely, by Lemma 3.7 and Theorem 3.4, for all
Therefore, by (1),
Sufficiency. To prove that h satisfies (MH3) , let p ≤ h (G) (x) ⋀ [⋀ y∈Gh (F) (y)] . It follows that and hence
From the arbitrariness of p, we deduce that h satisfies (MH3) . □
The following theorem gives the relations between the cut convex structures of an M-fuzzifying convex structure and the convex structures determined by the cut operators of its M-fuzzifying restricted hull operator. More specifically, we have
Theorem 3.9.Let be an M-fuzzifying convex structure and Then
and
If β (a ∧ b) = β (a) ∩ β (b) for any a, b ∈ M, then
Proof. (i). By (3) and Theorem 2.1,
Hence if then for all Thus for any b with a ∈ α (b′) , i.e. Thus for all Therefore, for all b with a ∈ α (b′) , and so Conversely, if for all b with a ∈ α (b′) , we show that If not, then there exist and such that Let Then contradicting Therefore, and so
(ii). The proof is similar to that of (i).
(iii). It is not difficult to show thatandNote that is equivalent to It follows that
Conversely, let We shall find an up-directed collection in and show its union is equal to A . First, let us consider the mapping defined byfor all By Theorems 2.1 and 2.9 we know Hence if then for any there exists B such that x ∉ B ⊇ F and Thus η (F) ⊆ A, and so it is well defined. It is also clear that F ⊆ η (F) and η (F) ⊆ η (G) whenever F ⊆ G . Note that for any and for all Let Then It follows that Now it is easily seen that is an up-directed collection in and A = ⋃𝒜 Thus and so as desired.
(iv). The proof is similar to that of (iii).
(v) and (vi). The proofs are straightforward. □
Theorem 3.10.Let h be an M-fuzzifying restricted hull operator. Then the following statements hold.
For any
If β (a ∧ b) = β (a) ∩ β (b) for any a, b ∈ M, then for any
Proof. Let in Theorem 3.9. □
In order to discuss the relation between the restricted hull operators of the cut convex structures of an M-fuzzifying convex structure and the cut operators of its M-fuzzifying restricted hull operator, we need the following lemma.
Lemma 3.11.Let {hi : i ∈ Ω} be a collection of restricted hull operators defined on Define ⋀i∈Ωhi and ⋁i∈Ωhi by (⋀ i∈Ωhi) (A) = ⋂ i∈Ωhi (A) andfor all respectively. Then
both ⋀i∈Ωhi and ⋁i∈Ωhi are restricted hull operators;
Proof. (i). It is routine to check that ⋀i∈Ωhi is a restricted hull operator. As for ⋁i∈Ωhi, (H1) and (H2) obviously hold. To show (H3) , let finite set S ⊆ (⋁ i∈Ωhi) (A) . By the definition of ⋁i∈Ωhi, for any we have and It follows that By the arbitrariness of we conclude that (⋁ i∈Ωhi) (S) ⊆ (⋁ i∈Ωhi) (A) .
(ii). It is not difficult to show that hi ≤ ⋁ i∈Ωhi . Thus and so Conversely, let Then for all Thus and hence for any finite set F ⊆ A, (⋁ i∈Ωhi) (F) ⊆ A . Therefore, and so
(iii). It is easily seen that hi ≥ ⋀ i∈Ωhi . Thus and hence Conversely, for any k ∈ Ω,
Thus and so □
Remark 3.12. Let {coi} i∈Ω be a family of hull operators defined on 2X . If we define ⋀i∈Ωcoi by (⋀ i∈Ωcoi) (A) = ⋂ i∈Ωcoi (A) for all A ⊆ X . Then holds for finite index set Ω . But, in general, ⋀i∈Ωcoi need not even be a hull operator. For example, let and
Let Then (⋀ i∈Ωcoi) (B) = ⋂ i∈Ωcoi (B) = X . But So ⋀i∈Ωcoi does not satisfy the condition of domain finiteness.
Now by Theorem 3.9 and Lemma 3.11, we have
Theorem 3.13.Let be an M-fuzzifying convex structure. Then
and
If β (a ∧ b) = β (a) ∩ β (b) for any a, b ∈ M, then
Theorem 3.14.Let be an M-fuzzifying convex structure. Then the following statements hold.
For any a ∈ P (M) and
If β (a ∧ b) = β (a) ∩ β (b) for any a, b ∈ M, then for any a ∈ α (⊥) and A ⊆ X,
Proof. (i). Combining the results of Theorem 3.13 (ii) and (v), we get for any a ∈ P (M) . By (MDF) , for any A ⊆ X . Thus
(ii). The proof is similar to that of (i). □
Example 3.15. Let X = {x, y, z} . Consider the I-fuzzifying convex structure illustrated in Table 1.
It is easy to check that
Note that for for Thus as Theorem 3.9 (iii) stated. Moreover, for any a ∈ (0, 1] , by Theorems 3.10 and 3.13, and as one can check.
Theorem 3.16.Let and be M-fuzzifying convex structures. A function f : X → Y is an M-fuzzifying convexity preserving function if and only if for all and x ∈ X .
Proof. Necessity. Let f (F) = G, f (x) = y . If y ∈ G, then the conclusion is obvious. Now assume y ∉ G . By (MCO3) of Theorem 2.9,
Since f is an M-fuzzifying convexity preserving function, for any B with y ∉ B ⊇ G, by (3),
By the arbitrariness of B, we get the desired inequality. Sufficiency. By (3), for any B ⊆ Y, Note that if then f (F) ⊆ B, f (x) ∉ B . It follows from that
Thus as required. □
Theorem 3.17.Let and be M-fuzzifying convex structures and f : X → Y be a bijection. Then
f is an M-fuzzifying convex-to-convex function if and only if for all and x ∈ X,
f is an M-fuzzifying isomorphism if and only if for all and x ∈ X,
Proof. The straightforward proof is omitted. □
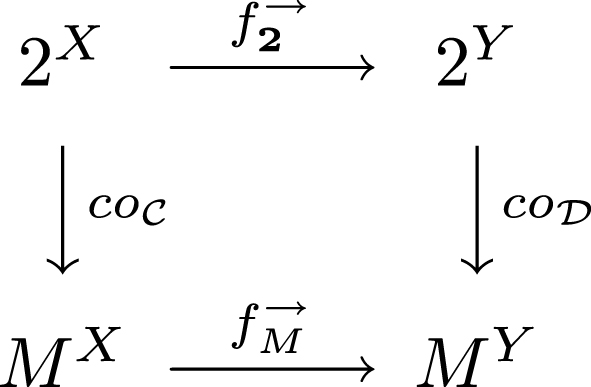
Remark 3.18. (i) In Theorem 3.17 (i), the condition ‘ f is a bijection ’ is not superfluous. For instance, let as in Example 3.15 and let be the convex structure given by Y = {1, 2} and for all A ⊆ Y . If we define f : X → Y by f (x) =1, f (y) =2, f (z) =1, then f is clearly an M-fuzzifying convex-to-convex function. But Let be the convex structure given by Y = {1, 2} and If we define f : Y → X by f (1) = x, f (2) = y, then f satisfies for all and y ∈ Y . But f is not an M-fuzzifying convex-to-convex function since (ii) The result (ii) of Theorem 3.17 implies that a bijection f : X → Y is an M-fuzzifying isomorphism if and only if the following diagram is commutative.
M-fuzzifying betweenness
In this section, we generalize the notion of betweenness (see Definition 2.5) to M-fuzzy setting and show that it can be interpreted in terms of M-fuzzifying restricted hull operator and vice versa.
Definition 4.1. A mapping is called an M-fuzzifying betweenness if it satisfies the following conditions.
(MB1) For all x ∈ X, δ (x, ∅) = ⊥ .
(MB2) If then δ (x, F) = ⊤ .
(MB3) For all and x ∈ X,
Definition 4.2. Let and be M-fuzzifying betweennesses. A mapping f : X → Y is called an M-fuzzifying betweenness preserving function if δ (x, F) ≤ η (f (x) , f (F)) for all x ∈ X and The following theorem shows that there is a natural one-to-one correspondence between M-fuzzifying betweennesses and M-fuzzifying restricted hulloperators.
Theorem 4.3.If is an M-fuzzifying betweenness, then defined by hδ (F) (x) = δ (x, F) is an M-fuzzifying restricted hull operator. Conversely, if is an M-fuzzifying restricted hull operator, then defined by δh (x, F) = h (F) (x) is an M-fuzzifying betweenness.
Proof. The straightforward proof is omitted. □
Remark 4.4. For a given M-fuzzifying betweenness there is an M-fuzzifying convex structure (or written simply as ). Conversely, for an M-fuzzifying convex structure there is an M-fuzzifying betweenness (or written simply as ). Under these notations, it is easily seen that and
Theorem 4.5.Let and be M-fuzzifying convex structures. A function f : X → Y is an M-fuzzifying convexity preserving function if and only if f is an M-fuzzifying betweenness preserving function, that is, for all x ∈ X and
Proof. This follows immediately from Theorem 3.16. □
Theorem 4.6.Let e : X × X → M be an M-fuzzy quasi-order. Define three mappings from to M by and for all respectively. Then
are M-fuzzifying betweennesses; and
The M-fuzzifying convexities and satisfy and for any {Ai : i ∈ Ω} ⊆2X, respectively.
Proof. (i). Take as an example. (MB1) and (MB2) are easily obtained. To show (MB3) , we may assume that G≠ ∅ as it holds trivially when G = ∅ . Thus
(ii). Let A = ⋃ i∈ΩAi . Then
Let We claim that Otherwise, there exist and such that Let Note that implies Since we have a contradiction. Thus as claimed. Since a is arbitrary, we conclude that □
Remark 4.7. One can view a partially ordered set (X, ≤) as an M-fuzzy partially ordered set (X, eX) in which M = 2 and eX (x, y) =⊤ if and only if x ≤ y . Then it is easily seen that the M-fuzzifying convexities and are the lower (upper) convexity and the order convexity of X, respectively.
Corollary 4.8. [9] Let R be a fuzzy preorder (i.e., R is a reflexive and transitive fuzzy binary relation on X). Then both and are Alexanderoff fuzzifying topological spaces.
Corollary 4.9.Let (X, d) be an ultrametric space and let Then all the M-fuzzifying convexities and are equal and is an Alexanderoff fuzzifying topological space.
Example 4.10. Note that e : I × I → I defined by e (x, y) = x → y is an I-fuzzy quasi-order. The I-fuzzifying convexity on I is computed as
Example 4.11. (i) Let d be the discrete metric on X, that is, for all x, y ∈ X, if x = y, then d (x, y) =0 ; otherwise, d (x, y) =1 . Then
(ii) Consider the p-adic distance dp (x, y) = |x - y|p on the field Q of rational numbers, where | · |p is the p-adic norm [12]. Since dp is an ultrametric on Q, it induces an I-fuzzifying convexity on Q .
Conclusions and future work
In this paper, the notion of M-fuzzifying restricted hull operator was defined and several equivalent characterizations were given. The notion of M-fuzzifying betweennesses was also proposed. As applications, some properties of the cut convex structures of an M-fuzzifying convex structure and of M-fuzzifying convexity preserving functions and of M-fuzzifying convex-to-convex functions were derived.
As we have seen, an M-fuzzifying convex structure is determined by its M-fuzzifying restricted hull operator Therefore, one can use M-fuzzifying restricted hull operators to construct M-fuzzifying convexities, as shown in Example 4.10. From the viewpoint of theory generalization, there are many work to do. For instance, by Remark 4.7, the M-fuzzifying convexity induced by an M-fuzzy partial order e is a reasonable generalization of the order convexity of a partially ordered set. As the order convexity of a partially ordered set is JHC, S3 and its segment operator is geometric, we need to consider how to generalize these properties to M-fuzzifying convexity Cδe .
References
1.
AsimowL. and EllisA.J., Convexity Theory and its Applications in Functional Analysis, Academic Press, London, 1980.
2.
BergerM., Convexity, American Mathematical Monthly97 (1990), 650–678.
3.
BirkhoffG., Lattice TheoryAmerican Mathematical Society Colloquium Publications, vol. 25, Revised ed, New York, 1948.
4.
ChangatM., MulderH.M and SierksmaG., Convexities related to path properties on graphs, Discrete Mathematics290 (2005), 117–131.
5.
DanzerL., GrünbaumB. and KleeV., Helly’s theorem and its relatives, Proceedings of Symposia in Pure Mathematics7 (1963), 101–180.
6.
DezaMichel-Marie and DezaElena, Encyclopedia of Distances, Springer-VerlagBerlin, Heidelberg, 2013.
7.
DuchetP., Convexity in combinatorial structures (English). In: FrolíkZ., SoučekV. and FabiánM., (eds.): Proceedings of the 14th Winter School on Abstract Analysis. Circolo Matematico di Palermo,Palermo, 1987, pp. 261–293.
8.
DwingerP., Characterizations of the complete homomorphic images of a completely distributive complete lattice I, Indagationes Mathematicae (Proceedings)85 (1982), 403–414.
9.
FangJ.M. and ChenP.W., One-to-one correspondence between fuzzifying topologies and fuzzy preorders, Fuzzy Sets and Systems158 (2007), 1814–1822.
10.
FranklinS.P., Some results on order-convexity, American Mathematical Monthly69 (1962), 357–359.
11.
HuangH.L. and ShiF.G., L-fuzzy numbers and their properties, Information Sciences178 (2008), 1141–1151.
12.
KoblitzN., P-adic numbers, p-adic Analysis and Zetafunctions, Second edition, Springer-Verlag, New York, 1984.
13.
LeviF.W., On Helly’s theorem and the axioms of convexity, J Indian Math Soc15(Part A) (1951), 65–76.
MulderH.M., The interval function of a graph, Math Centre Tracts, Mathematisch Centrum, Amsterdam132 (1980).
16.
NegoitaC.V. and RalescuD.A., Interdisciplinary Systems Research Series, Applications of Fuzzy Sets to Systems Analysis11 , Birkhäuser, Basel, Stuttgart and Halsted Press, New York, 1975.
17.
RockafellarR.T., Convex Analysis, Princeton University Press, Princeton, 1970.
18.
RosaM.V., On fuzzy topology fuzzy convexity spaces and fuzzy local convexity, Fuzzy Sets and Systems62 (1994), 97–100.
19.
ShiF.G., Theory of Lβ-nested sets and Lα-nested sets and its applications, Fuzzy Systems and Mathematics4 (1995), 65–72. (in Chinese).
20.
ShiF.G., L-fuzzy sets and prime element nested sets, J Mathematical Research and Exposition16 (1996), 398–402. (in Chinese).
21.
ShiF.G., Theory of molecular nested sets and its applications, J Yantai Teachers University (Natural Science)12 (1996), 33–36. (in Chinese).
22.
ShiF.G., L-fuzzy relation and L-fuzzy subgroup, Journal of Fuzzy Mathematics8 (2000), 491–499.
23.
ShiF.G. and XiuZ.Y., A new approach to the fuzzification of convex structures, Journal of Applied Mathematics, 2014, Article ID 249183.
24.
van de VelM., Binary convexities and distributive lattices, Proc London Math Soc48(3) (1984), 1–33.
25.
van de VelM.L.J., Theory of Convex Structures, North-Holland, New York, 1993.
26.
WangG.J., Theory of L-Fuzzy Topological Spaces, Shanxi Normal University Press,Xi’an, 1988. (in Chinese).
27.
WangG.J., Theory of topological molecular lattices, Fuzzy Sets and Systems47 (1992), 351–376.
28.
ZhangQ.Y. and FanL., Continuity in quantitative domains, Fuzzy Sets and Systems54 (2005), 118–131.