In this paper, the notion of subuniverses in the theory of universal algebras is generalized to L-fuzzy setting, which is called L-subuniverses. Some characterizations and representations of L-subuniverses are given. What is more, the relationship between L-subuniverses and L-convexities is discussed when L is a complete Heyting algebra. It is shown that there exists a one-to-one correspondence between L-subuniverses with the smallest L-subset and induced L-convexities.
In the standard case, a set in an n-dimensional Euclidean space is convex if and only if it contains the whole segments joining each two of its points. By axiomatizing the properties of convex sets in Euclidean spaces, a concept of convexity (or abstract convexity) was introduced in [3, 19]. Since the early decades of last century, the notion of convexity had been redefined by some authors [5, 12]. In this paper, we focus on the convexity with domain finiteness. In [7], Hammer showed that domain finiteness is equivalent to the property that the convexity is closed under totally ordered unions.
A convexity with domain finiteness (also called convexity in [20]) on a non-empty set X is defined to be a family of 2X which contains ∅, X and which is closed under arbitrary intersections and totally ordered unions (see Definition 2.13). In recent years, the theory of universal algebras [1, 22] has enjoyed a particularly explosive growth. One of the aims of universal algebras is to extract the common elements of several different types of algebraic structures, such as groups, rings, lattices and so on. The relationship between algebraic lattices and subuniverses plays an important part in the theory of universal algebras. In fact, a convexity is an algebraic lattice and each algebraic lattice is isomorphic to a convexity on some set [20].
With the development of fuzzy mathematics, the notion of convexity has already been extended to fuzzy set theory. In 1994, M.V. Rosa presented the notion of fuzzy convexity in [15]. In 2009, Y. Maruyama generalized it to L-fuzzy setting in [13]. More recently, F.G. Shi and Z.Y. Xiu [18] gave a new approach to fuzzification of convexity in a completely different direction and proposed the concept of M-fuzzifying convexity. What’s more, F.G. Shi and E.Q. Li [17] showed that there is a one-to-one correspondence between M-fuzzifying restricted hull operators and M-fuzzifying convexities. And X.Y. Wu and S.Z. Bai introduced M-fuzzifying JHC convex structures and M-fuzzifying Peano interval spaces [23]. Besides, from the perspective of category theory, B. Pang and F.G. Shi [14] discussed some relationships among several types of L-convex spaces, including stratified L-convex spaces, convex-generated L-convex spaces, weakly induced L-convex spaces and induced L-convex spaces.
This paper is organized as follows. In Section 2, some necessary concepts of complete Heyting algebras, universal algebras and L-convex spaces are recalled. In Section 3, the notion of subuniverses in the universal algebra theory is generalized to L-fuzzy setting. Then several equivalent characterizations and some representations of L-subuniverses are given. In Section 4, the relationship between L-subuniverses and L-convexities is discussed in detail. Actually, there is a one-to-one correspondence between L-subuniverses with the smallest L-subset and induced L-convexities.
Preliminaries
Throughout this paper, unless otherwise stated, (L, ∨, ∧) denotes a complete Heyting algebra (or a complete frame), where finite meets distribute over arbitrary joins, i.e., a ∧ (⋁ i∈Ibi) = ⋁ i∈I (a ∧ bi) holds for all a, bi ∈ L (i ∈ I). The smallest element and the largest element in L are denoted by ⊥ and ⊤, respectively. Let X be a non-empty set. We denote the set of all subsets (resp., all finite subsets) of X by 2X (resp., ) and denote the set of all L-fuzzy sets of X by LX. The smallest element and the largest element in LX are denoted by χ∅ and χX, respectively. LX is also a complete Heyting algebra when it inherits the structure of the lattice L in a natural way, by defining ∨, ∧, ≤ pointwisely. We often do not distinguish a crisp subset A of X from its characteristic function χA. Also, we adopt the convention that ⋀∅ = ⊤ and ⋁∅ = ⊥.
From the definition of complete Heyting algebras, we have the following corollary.
Corollary 2.1.A lattice L is a complete Heyting algebra if and only if it satisfies the following condition:for each and for all {aik} ik∈Ik ⊆ L, k = 1, ..., n.
Proof. We first show that the result holds for n = 2. By the definition of complete Heyting algebras, we have (⋁ i1∈I1ai1) ∧ (⋁ i2∈I2ai2) = ⋁ i2∈I2 ((⋁ i1∈I1ai1) ∧ ai2) = ⋁ (i1,i2)∈I1×I2 (ai1 ∧ ai2). Recursively, the result holds for each . □
By Corollary 2.1, it is easy to obtain the following proposition.
Proposition 2.2.Let (L, ∨, ∧) be a complete Heyting algebra. If {Ai ∣ i ∈ I} ⊆ LX is non-empty and totally ordered, then for all finite elements x1, ..., xn ∈ X,
Proof. We only need to show that (⋁ i∈IAi (x1)) ∧ (⋁ i∈IAi (x2)) = ⋁ i∈I (Ai (x1) ∧ Ai (x2)) for any x1, x2 ∈ X. On one hand, it is obvious that (⋁ i∈IAi (x1)) ∧ (⋁ i∈IAi (x2)) ≥ ⋁ i∈I (Ai (x1) ∧ Ai (x2)). On the other hand, (⋁ i∈IAi (x1)) ∧ (⋁ i∈IAi (x2)) = (⋁ i∈IAi (x1)) ∧ (⋁ j∈JAj (x2)) = ⋁ (i,j)∈I×I (Ai (x1) ∧ Aj (x2)). Since {Ai ∣ i ∈ I} ⊆ LX is totally ordered, suppose that Aj ≤ Ai, we have ⋁(i,j)∈I×I (Ai (x1) ∧ Aj (x2)) ≤ ⋁ i∈I (Ai (x1) ∧ Ai (x2)). Recursively, the equality holds for any finite elements x1, ..., xn ∈ X. □
An element a in L is called a prime element if b ∧ c ⩽ a implies b ⩽ a or c ⩽ a. An element a in L is called a co-prime element if b ∨ c ⩾ a implies b ⩾ a or c ⩾ a [6]. The set of non-unit (L removes the largest element) prime elements in L is denoted by P (L). The set of non-zero (L removes the smallest element) co-prime elements in L is denoted by J (L).
We say that a is wedge below b (in symbols, a ≺ b), if for every subset D ⊆ L, ⋁D ≥ b implies a ≤ d for some d ∈ D [4]. We denote β (a) = {x ∈ L ∣ x ≺ a} and a ≺ opb means that if for every subset D ⊆ L, ⋀D ≤ b implies d ≤ a for some d ∈ D. We denote α (a) = {x ∈ L ∣ x ≺ opa}.
For any A ∈ LX and a ∈ L, we can define two cut sets of A as follows: A[a] = {x ∈ X ∣ A (x) ≥ a} and A(a) = {x ∈ X ∣ A (x) ≰ a}. In the sequel, the binary relation ≺ in L can be used to define two new cut sets of A.
Some properties of these cut sets can be found in [9, 16].
Remark 2.4. When L = [0, 1], A(a) = A(a) = {x ∈ X ∣ A (x) > a} and A[a] = A[a]. But for a general complete lattice L, A(a), A(a) and {x ∈ X ∣ A (x) > a} are different. For example, let X = {1, 2, 3} and L = 2{a,b}. Consider an L-fuzzy set A defined by A (1) = {a, b}, A (2) = {a} and A (3) = {b}. It is easy to check that A[{a}] = A({a}) = {1, 2}, A[{a}] = A({a}) = {1, 3} and {x ∈ X ∣ A (x) > a} = {1}.
In what follows, some notions and results in the theory of universal algebras are recalled.
We denote X0 = {∅} and Xn as the set of n-tuples of elements from X. An operation f : Xn ⟶ X is called an n-ary operation on X and n is called the arity (or rank) of f. A finitary operation is an n-ary operation, for some n. An operation f is called a nullary operation if its arity is zero, it is determined by the image f (∅).
Definition 2.5. [1, 2] Let X be a non-empty set and be a family of finitary operations on X. Then is called an algebra of type and the set X is usually called the universe (or underlying set) of .
We denote (resp., ) as the set of all n-ary operations (resp., all nullary operations). If is finite, say , we often write 〈X, f1, ..., fk〉 for , usually adopting the convention: arity f1≥ arity f2≥ ⋯ ≥ arity fk.
Example 2.6. A lattice is an algebra 〈L, ∨, ∧ 〉 with two binary operations satisfying the following conditions. ∀a1, a2, a3 ∈ L,
Example 2.7. A group is an algebra 〈G, ·, -1, 1〉 with a binary, a unary and a nullary operation in which the following identities are true. ∀a, a1, a2, a3 ∈ G,
a1 · (a2 · a3) = (a1 · a2) · a3;
a · 1 =1 · a = a;
a · a-1 = a-1 · a = 1.
A group is Abelian (or commutative) if the following identity is true.
a1 · a2 = a2 · a1.
A semigroup is a groupoid 〈G, · 〉 in which (G1) is true.
Example 2.8. A ring is an algebra 〈R, +, ·, -, 0〉, where + and · are binary, - is unary and 0 is nullary, satisfying the following conditions. ∀a1, a2, a3 ∈ R,
Definition 2.9. [1, 2] Let be an algebra of type . A ∈ 2X is called a subuniverse of if it is closed under all operations of , namely, for each and for all , x1, ..., xn ∈ A, we have f (x1, ..., xn) ∈ A.
We denote as the set of all subuniverses of .
Remark 2.10. The empty set ∅ may be a subuniverse. If , then ∅ is a subuniverse. If , then ∅ is not a subuniverse.
Definition 2.11. [1, 2] Given an algebra of type . For each A ∈ 2X, define an operator sg : 2X ⟶ 2X by . Then sg (A) is called the subuniverse generated by A.
Theorem 2.12. [1, 2] Let be an algebra of type . Then sg (A) is the minimum subuniverse including A and , where E0 (A) = A, .
Convexities (or convex structures) exist in various research areas, such as, vector spaces, partially ordered sets, semilattices, lattices, matroids and so on. Subuniverses have close relations with convexities. In fact, it is not difficult to find that all subuniverses of some algebra with the empty set can constitute an convexity.
Definition 2.13. [20] A subset of 2X is called a convexity, if it satisfies the following conditions:
∅, ;
If is non-empty, then ;
If is non-empty and totally ordered by inclusion, then .
The pair is called a convex space. The members of are called convex sets. For any A ∈ 2X, is called convex hull of A, which is the smallest convex set that contains A. Moreover, can alternatively be regarded as an operator called (convex) hull operator which have the normalization, extensive, idempotent and domain finite laws. That is,
co (∅) = ∅;
A ⊆ co (A);
co (co (A)) = co (A);
.
Actually, there exists a one-to-one correspondence between convexities and operators with the properties (CO1)-(CO3) and (DF) [20].
In 1994, M.V. Rosa introduced the concept of fuzzy convexity in [15]. In 2009, Y. Maruyama generalized it to L-fuzzy setting as follows.
Definition 2.14. [13] A subset of LX is called an L-convexity if it satisfies the following conditions:
χ∅, ;
If is non-empty, then ;
If is non-empty and totally ordered by inclusion, then .
The pair is called an L-convex space and the members of are called L-convex sets. For each A ∈ LX,
is called the L-convex hull of A.
L-subuniverses and their characterizations
In this section, the notion of subuniverses in the theory of universal algebras is generalized to L-fuzzy setting, which is called L-subuniverses. Then several equivalent characterizations and representations of L-subuniverses are given.
Definition 3.1. Let be an algebra of type . A ∈ LX is called an L-subuniverse of if for each and for all , x1, ..., xn ∈ X, we have A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)).
We denote as the set of all L-subuniverse of .
Remark 3.2. If , then χ∅ is an L-subuniverse. If , then χ∅ is not an L-subuniverse.
Example 3.3. Let an algebra be a lattice 〈L, ∨, ∧ 〉 which has no nullary operations. Then and χ∅ is an L-subuniverse. Let an algebra be a group 〈G, ·, -1, 1〉 which has a binary, a unary and a nullary operation. Then . By Definition 3.1, we know ⋀∅ = ⊤ ≰ χ∅ (f (∅)) = χ∅ (1) = ⊥. Hence χ∅ is not an L-subuniverse. Let an algebra be a bounded lattice 〈L, ∨, ∧, 0, 1〉 which has two binary and two nullary operations. Then and χ∅ is not an L-subuniverse as well.
Theorem 3.4. L-subuniverse1 Let be an algebra of type and A ∈ LX. Then the following statements are equivalent.
A is an L-subuniverse of .
For each a ∈ L, A[a] is a subuniverse of .
Proof. (1) ⇒ (2). Assume that A is an L-subuniverse of . For each a ∈ L and for all x1, ..., xn ∈ A[a], we have A (f (x1, ..., xn)) ≥ A (x1) ∧ ⋯ ∧ A (xn) ≥ a. This implies f (x1, ..., xn) ∈ A[a]. Hence A[a] is a subuniverse of .
(2) ⇒ (1) Suppose that A[a] is a subuniverse of for each a ∈ L. For each and for all , x1, ..., xn ∈ X. Let a = A (x1) ∧ ⋯ ∧ A (xn). Then x1, ..., xn ∈ A[a]. So A (f (x1, ..., xn)) ∈ A[a]. Hence A (f (x1, ..., xn)) ≥ a = A (x1) ∧ ⋯ ∧ A (xn), which means A is an L-subuniverse of . □
In order to discuss other characterizations of L-subuniverses, we need to recall some results in completely distributive lattices.
Lemma 3.5. [21] Let L be a completely distributive lattice and let {ai ∣ i ∈ I} ⊆ L. Then
α (⋀ i∈Iai) = ⋃ i∈Iα (ai), i.e., α (·) : L ⟶ 2X is a ⋀-⋃ mapping.
β (⋁ i∈Iai) = ⋃ i∈Iβ (ai), i.e., β (·) : L ⟶ 2X is a union-preserving mapping.
From Lemma 3.5, we know that α (·) is an order-reversing and β (·) is an order-preserving.
Lemma 3.6. [18] Let L be a completely distributive lattice. Then for all x, y ∈ L, the following conditions are equivalent.
x ⩽ y.
for each a ∈ J (L), a ⩽ x ⇒ a ⩽ y.
for each a ∈ α (⊥), a ∉ α (x) ⇒ a ∉ α (y).
for each a ∈ P (L), x≰a ⇒ y≰a.
for each a ∈ β (⊤), a ∈ β (x) ⇒ a ∈ β (y).
Theorem 3.7.Let be an algebra of type and A ∈ LX. If L is completely distributive, then the following conditions are equivalent.
A is an L-subuniverse of .
For each a ∈ J (L), A[a] is a subuniverse of .
For each a ∈ α (⊥), A[a] is a subuniverse of .
For each a ∈ P (L), A(a) is a subuniverse of .
If β (a ∧ b) = β (a) ∩ β (b) for any a, b ∈ L, then for each a ∈ β (⊤), A(a) is a subuniverse of .
Proof. (1) ⇒ (2) It follows immediately from Theorem 3.4.
(2) ⇒ (1) In order to prove that A is an L-subuniverse of , we need to check the inequality A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)) for each and for all , x1, ..., xn ∈ X. Assume that a ∈ J (L) with a ≤ A (x1) ∧ ⋯ ∧ A (xn). Then a ≤ A (x1), ..., a ≤ A (xn). This implies x1 ∈ A[a], ..., xn ∈ A[a]. Note that A[a] is a subuniverse for each a ∈ J (L). Then f (x1, ..., xn)) ∈ A[a], which means a ≤ A (f (x1, ..., xn)). By the arbitrariness of a, we obtain A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)). Hence A is an L-subuniverse of .
(1) ⇒ (3) For each a ∈ α (⊥), take any x1, ..., xn ∈ A[a]. Then a ∉ α (A (x1)), ..., a ∉ α (A (xn)). Since α is a ⋀-⋃ mapping, we have a ∉ α (A (x1)) ∪ ⋯ ∪ α (A (xn)) = α (A (x1) ∧ ⋯ ∧ A (xn)). Note that A is an L-subuniverse. Then A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)) for each and for all . So α (A (f (x1, ..., xn))) ⊆ α (A (x1) ∧ ⋯ ∧ A (xn)). Thus a ∉ α (A (f (x1, ..., xn))). This shows f (x1, ..., xn) ∈ A[a]. Hence A[a] is a subuniverse of .
(3) ⇒ (1) We need to check the inequality A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)) for each and for all , x1, ..., xn ∈ X. Assume that a ∈ α (⊥) with a ∉ α (A (x1) ∧ ⋯ ∧ A (xn)). Since α (A (x1) ∧ ⋯ ∧ A (xn)) = α (A (x1)) ∪ ⋯ ∪ α (A (xn)), we know a ∉ α (A (x1)), ..., a ∉ α (A (xn)), which means x1, ..., xn ∈ A[a]. Note that A[a] is a subuniverse for each a ∈ α (⊥). Then A (f (x1, ..., xn)) ∈ A[a]. This shows a ∉ α (A (f (x1, ..., xn))). By the arbitrariness of a, we obtain A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)). Hence A is an L-subuniverse of .
(1) ⇒ (4) For each a ∈ P (L), take any x1, ..., xn ∈ A(a). Then A (x1) ≰ a, ..., A (xn) ≰ a. Since a is a prime element, we have A (x1) ∧ ⋯ ∧ A (xn) ≰ a. Note that A is an L-subuniverse. Then A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)) for each and for all . It follows that A (f (x1, ..., xn)) ≰ a, which shows f (x1, ..., xn) ∈ A(a). Hence A(a) is a subuniverse of .
(4) ⇒ (1) It suffices to check the inequality A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)) for each and for all , x1, ..., xn ∈ X. Suppose that a ∈ P (L) with A (x1) ∧ ⋯ ∧ A (xn) ≰ a. Then A (x1) ≰ a, ..., A (xn) ≰ a. This means x1, ..., xn ∈ A(a). Note that A(a) is a subuniverse for each a ∈ P (L). Then f (x1, ..., xn) ∈ A(a), which shows A (f (x1, ..., xn)) ≰ a. By the arbitrariness of a, we obtain A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)). Hence A is an L-subuniverse of .
(1) ⇒ (5) For each a ∈ β (⊤), take any x1, ..., xn ∈ A(a). Then a ∈ β (A (x1)), ..., a ∈ β (A (xn)). Since β (A (x1)) ∩ ⋯ ∩ β (A (xn)) = β (A (x1) ∧ ⋯ ∧ A (xn)), we know a ∈ β (A (x1) ∧ ⋯ ∧ A (xn)). Note that A is an L-subuniverse. Then A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)) for each and for all . So β (A (x1) ∧ ⋯ ∧ A (xn)) ⊆ β (A (f (x1, ..., xn))). Thus a ∈ β (A (f (x1, ..., xn))). This shows f (x1, ..., xn) ∈ A(a). Hence A(a) is a subuniverse of .
(5) ⇒ (1) We need to check the inequality A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)) for each and for all , x1, ..., xn ∈ X. Suppose that a ∈ β (⊤) with a ∈ β (A (x1) ∧ ⋯ ∧ A (xn)). Since β (A (x1) ∧ ⋯ ∧ A (xn)) = β (A (x1)) ∩ ⋯ ∩ β (A (xn)), we have a ∈ β (A (x1)), ..., a ∈ β (A (xn)). This shows x1, ..., xn ∈ A(a). Note that A(a) is a subuniverse for each a ∈ β (⊤). Then A (f (x1, ..., xn)) ∈ A(a), which implies a ∈ β (A (f (x1, ..., xn))). By the arbitrariness of a, we obtain A (x1) ∧ ⋯ ∧ A (xn) ≤ A (f (x1, ..., xn)). Hence A is an L-subuniverse of . □
From Definition 3.1, it is not difficult to check that an arbitrary intersection of L-subuniverses of is also an L-subuniverse. Hence we have the following definition.
Definition 3.8. Let be an algebra of type . For each A ∈ LX, define an operator sgL : LX ⟶ LX by ∀A ∈ LX,
Then sgL (A) is called the L-subuniverse generated by A.
Theorem 3.9.Let be an algebra of type . Then sgL (A) is the minimum L-subuniverse including A and
Proof. The proofs are trivial from Definitions 3.1 and 3.8 and omitted here. □
In what follows, we shall give a specific representation of the L-subuniverse generated by A.
Theorem 3.10.Let be an algebra of type . Then
for all A ∈ LX and x ∈ X, where E0 (A) (x) = A (x) and
for each .
Proof. Denote , we need to prove that C is the minimum L-subuniverse including A.
(i) From the above recurrence formula, it is easy to see that A≤ E (A) ≤ E2 (A) ≤ ⋯, which means A ≤ Ek (A) for each and is an increasing sequence. This shows A ≤ C.
(ii) In order to prove C is an L-subuniverse, we need to show that C (x1) ∧ ⋯ ∧ C (xn) ≤ C (f (x1, ..., xn)) for each and for all , x1, ..., xn ∈ X. By Proposition 2.2, we have
Since , where E0 (A) = A and
we have
for each . Hence . This shows C is an L-subuniverse.
(iii) For any and A ≤ B, it suffices to prove C ≤ B. For each , for all and x1, ..., xn ∈ X, we have
which implies E (A) ≤ B. Suppose that Ek (A) ≤ B, in a similar way, we can get Ek+1 (A) ≤ B. By induction, we have Ek (A) ≤ B for each . Hence . This shows C is the minimum L-subuniverse including A. □
The relationship between L-subuniverses and L-convexities
In this section, the relationship between L-sub- universes and L-convexities is discussed in detail. We shall show that all L-subuniverses of some algebra with the smallest L-subset form an induced L-convexity. Conversely, if an L-convexity is induced, then there exists an algebra such that all L-subuniverses of this algebra with the smallest L-subset is exactly the given induced L-convexity.
In order to write simply, we use to denote in the following contents.
Theorem 4.1.Let be an algebra of type and be the set of all L-subuniverses of . Then is an L-convexity on X.
Proof. We need check the conditions (LC1)-(LC3).
(LC1) Obviously, .
(LC2) Let be non-empty. If there exists some i ∈ I such that Ai = χ∅, then . Now we assume that Ai is an L-subuniverse and Ai ≠ χ∅ for all i ∈ I. Then for each and for all , x1, ..., xn ∈ X, we have
This shows .
(LC3) Let be non-empty and totally ordered. Since χ∅ has no influence on the unions of Aj (j ∈ J), we suppose that Aj is an L-subuniverse and Aj ≠ χ∅ for all j ∈ J. Then for each and for all , x1, ..., xn ∈ X, we have
This shows .
Therefore is an L-convexity. □
In the following theorem, we will give the specific representation of the L-convex hull of A ∈ LX with respect to the L-convexity .
Theorem 4.2.Let be an algebra of type . denotes the L-hull operator of the L-convexity . Then
In particular, if , then for all A ∈ LX.
Example 4.3. Let 〈X, ∨, ∧ 〉 be a lattice. A ∈ LX is called an L-subuniverse (or L-sublattice) of 〈X, ∨, ∧ 〉 if A (a1) ∧ A (a2) ≤ A (a1 ∧ a2) and A (a1) ∧ A (a2) ≤ A (a1 ∨ a2) for all a1, a2 ∈ X. By Definition 3.1, we know χ∅ is an L-subuniverse. Hence sgL (χ∅) = χ∅. By Theorems 4.1 and 4.2, we know LFS*〈M, ∨, ∧ 〉 is an L-convexity and for all A ∈ LM and x ∈ M, where E0 (A) (x) = A (x),
for each .
Example 4.4. Let 〈G, ·, -1, 1〉 be a group. A ∈ LG is called an L-subuniverse (or L-subgroup) of 〈G, ·, -1, 1〉 provided A (1) =⊤, A (a) ≤ A (a-1) (or A (a) = A (a-1)), A (a1) ∧ A (a2) ≤ A (a1 · a2) for all a, a1, a2 ∈ G. By Theorem 4.1, we know LFS*〈G, ·, -1, 1〉 is an L-convexity. If A = χ∅, then . If A ≠ χ∅, according to Theorems 3.10 and 4.2, then for all x ∈ G, where E0 (A) (x) = A (x),
for each .
Example 4.5. Let 〈R, +, ·, -, 0〉 be a ring. A ∈ LR is called an L-subuniverse (or L-subring) of 〈R, +, ·, -, 0〉 provided A (0) =⊤, A (a) ≤ A (- a) (or A (a) = A (- a)), A (a1) ∧ A (a2) ≤ A (a1 + a2), A (a1) ∧ A (a2) ≤ A (a1 · a2) for all a, a1, a2 ∈ R. By Theorem 4.1, we know LFS*〈R, +, ·, -, 0〉 is an L-convexity. If A = χ∅, then . If A ≠ χ∅, then for all x ∈ R, where E0 (A) (x) = A (x),
for each .
In what follows, we shall not distinguish the crisp set A[a] from its characteristic function χA[a] for all a ∈ L.
Lemma 4.6.Let be an algebra of type . Then the L-convexity satisfies the following condition:
(ILC) ∀A ∈ LX, if and only if for each a ∈ L, .
Proof. The proof is trivial from Theorem 3.4 and omitted here. □
Definition 4.7. [14] If is an L-convexity on X satisfying the condition (ILC), namely,
Then is called an induced L-convexity.
By Theorem 4.1 and Lemma 4.6, we know is an induced L-convexity. Conversely, if an L-convexity is induced, whether there exists some algebra such that all L-subuniverses of this algebra with the smallest L-subset is exactly the given induced L-convexity.
In order to discuss the question, we need the following lemmas.
Lemma 4.8.Let be an induced L-convexity. Then
is a convexity on X and for all A ∈ 2X.
For all x1, ..., xn ∈ X, if , then A (x1) ∧ ⋯ ∧ A (xn) ≤ A (x) for any .
Proof. (1) is trivial. On the other hand, since and , we have . Then . Hence .
(2) Let p = A (x1) ∧ ⋯ ∧ A (xn). Then the finite set F ⊆ A[p]. By the extensive law of hull operator and the results of (1), we have . This implies x ∈ A[p]. Hence A (x1) ∧ ⋯ ∧ A (xn) ≤ A (x). □
Lemma 4.9.Let be a convex space. Then there exists an algebra of type such that , where .
Proof. (1) let be the hull operator of . For each and , define an n-ary operation fF,b : Xn ⟶ X by
Then we obtain an algebra of type .
(2) It is not difficult to prove that is a convexity on X. Let be the hull operator of the convexity . Then we can easily obtain
where
(3) To prove , it suffices to show that for all A ∈ 2X.
If A =∅, then .
If A¬ = ∅, is trivial. By Theorem 2.12, we have for any A ⊆ X. On the other hand, and . Hence . Therefore for all A ∈ 2X. □
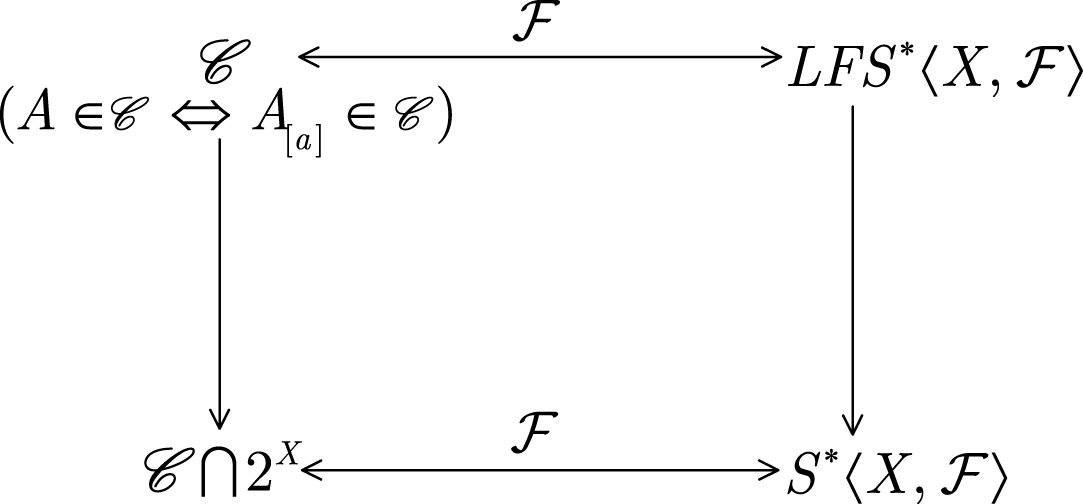
Theorem 4.10.If is an induced L-convexity on X, then there exists an algebra of type such that .
Proof. Firstly, it follows immediately from Lemma 4.8 (1) that is a convexity and for all A ∈ 2X. Then we can construct an algebra of type in the same way of Lemma 4.9.
To prove , it suffices to show that for all . If A = χ∅, it is straightforward. If A ¬ = χ∅, by Theorem 3.10, then
for all x ∈ X, where E0 (A) (x) = A (x) and
for each . Combining this with the results of Lemma 4.8, it is easy to see that E (A) ≤ A. In a similar way, we obtain Ek (A) ≤ A for each . So . Hence .
On the other hand, by Lemma 4.9 and the construction of , it is clear that . For any , by Theorem 3.4, we know for each a ∈ L. Since is induced, we have . Hence . □
Therefore, we can obtain the following diagram (see Fig. 1).
The relationship between L-subuniverses and L-convexities.
Conclusions
In this paper, the concept of L-subuniverses of an algebra was introduced and their characterizations and representations were given. Besides, the relationship between L-subuniverses and L-convexities was discussed and it is shown that there is a one-to-one correspondence between L-subuniverses with the smallest L-subset and induced L-convexities.
As we have seen, an algebra includes so many examples, such as a lattice, a group, a ring and so on. In the future, we will generalize the concept of L-subuniverses. We shall give some degree to which an L-subset is an L-subuniverses and discuss the relationship between L-subuniverse degrees and (L, M)-convexities.
Footnotes
Acknowledgments
The authors would like to express their sincere thanks to the anonymous reviewers for their careful reading and constructive comments. This work is supported by the National Natural Science Foundation of China (11371002), Specialized Research Fund for the Doctoral Program of Higher Education (20131101110048) and the National Natural Science Foundation of China (11701089).
References
1.
BergmanC.H., Universal Algebra: Fundamentals and selected topics, CRC Press, 2012.
2.
BurrisS. and SankappanavarH.P., A Course in Universal Algebra, Springer-Verlag, New York-Berlin, 1999.
3.
CoppelW.A., Axioms for convexity, Bulletin of the Australian Mathematical Society47 (1993), 179–197.
4.
DwingerP., Characterizations of the complete homomorphic images of a completely distributive complete lattice I, Indag Math (Proc)85 (1982), 403–414.
5.
EdelmanP.H. and JamisonR.E., The theory of convex geometries, Geometriae Dedicata19 (1985), 247–270.
6.
GierzG., HofmannK.H. and KeimelK., A Compendium of Continuous Lattices, Springer, Berlin, 1980.
HöhleU. and ŠostakA.P., Axiomatic Foundations of Fixed-Basis Fuzzy Topology, Springer, US, 1999.
9.
HuangH.L. and ShiF.G., L-fuzzy numbers and their properties, Information Sciences178 (2008), 1141–1151.
10.
JamisonR.E., A general theory of convexity, Dissertation, University of Washington, Seattle, Washington, 1974.
11.
KayD.C. and WombleE.W., Axiomatic convexity theory and relationships between the Carathéodory, Helly, and Radon numbers, Pacific Journal of Mathematics38 (1971), 471–485.
12.
LlinaresJ.V., Abstract convexity, some relations and applications, Optimization51 (2002), 797–818.
PangB. and ShiF.G., Subcategories of the category of L-convex spaces, Fuzzy Sets and Systems313 (2017), 61–74.
15.
RosaM.V., On fuzzy topology fuzzy convexity spaces and fuzzy local convexity, Fuzzy Sets and Systems62 (1994), 97–100.
16.
ShiF.G., L-fuzzy relations and L-fuzzy subgroups, The Journal of Fuzzy Mathematics8 (2000), 491–499.
17.
ShiF.G. and LiE.Q., The restricted hull operator of M-fuzzifying convex structures, Journal of Intelligent and Fuzzy Systems30 (2015), 409–421.
18.
ShiF.G. and XiuZ.Y., A new approach to the fuzzification of convex structures, Journal of Applied Mathematics2014 (2014), 1–12.
19.
SierksmaG., Extending a convexity space to an aligned space, Proceedings of the Koninklijke Nederlandse Akademie Van Wetenschappen87 (1984), 429–435.
20.
van de VelM., Theory of Convex Structures, North Holland, Amsterdam, 1993.
21.
WangG.J., Theory of topological molecular lattices, Fuzzy Sets and Systems47 (1992), 351–376.
22.
WechlerW., Universal Algebra for Computer Scientists, Springer-Verlag, Berlin Heidelberg, 1992, (Chapter I).
23.
WuX.Y. and BaiS.Z., On M-fuzzifying JHC convex structures and M-fuzzifying peano interval spaces, Journal of Intelligent and Fuzzy Systems30 (2016), 2447–2458.