
Abstract
The preload and load torque are two important operating parameters of traveling wave ultrasonic motors (TWUSMs), which have strong effects on the contact of stator and rotor. First, the effects of preload and load torque on vibrations of stator were investigated in this paper. A laser Doppler vibrometer was used to measure the vibration velocities of stator. According to the results, the vibration velocity curve of free stator is basically sinusoid. As the preload and load torque applied, the fluctuations in the peaks and troughs of the velocity curve are increased, which indicates that the movement trajectory of the particle on stator surface is changed. The stator amplitude is not the only parameter which represents the drive capability of stator. The drive capability of stator is also related to the movement trajectory of the particle on stator surface. Then, the preload coefficient and load torque coefficient were proposed. Using the two coefficients, the effective amplitude could be obtained. Finally, the contact model considering preload and load torque was established. The performances of the motor were analyzed using the proposed contact model and the calculated results shown good agreements to the measured values.
Introduction
Travelling wave ultrasonic motors (TWUSMs) transmits the power via frictional force at the contact area between the stator and rotor [1, 2, 3]. The contact between stator and rotor is an important problem for the modeling of TWUSM. The nonlinearity of the contact mechanisms has been made it difficult to propose an effective contact model [4, 5, 6]. Energy conversion in a TWUSM occurs in two stages: piezoelectric coupling and frictional coupling [7, 8]. During piezoelectric coupling, electrical energy is converted to high frequency mechanical vibration. In the stage, the vibration modes, the resonance frequency, and the displacement amplitude of stator usually are analyzed using numerical methods or the analytical method [9, 10, 11, 12, 13]. During frictional coupling, the mechanical vibration is converted to the revolution of rotor. The nonlinear dynamic contact mechanism was analyzed in this stage [4, 7, 8, 14, 15, 16]. Reports usually focused on one of the two stages. The results of piezoelectric coupling were used as given parameters in the frictional coupling. However, the contact and frictional mechanisms of stator and rotor also have effects on the results of piezoelectric coupling, such as resonance frequency and stator amplitude. The effects usually are ignored owing to the oversimplifications and assumptions in the previous contact models.
Lim et al. [8] proposed an ellipsoidal static contact model and then Ro et al. [14] in the same group proposed a cylindrical dynamic contact model. The characteristics of a TWUSM could be analyzed using their models. The contact models and characteristics analysis methods for TWUSMs were also summarized and compared by the group. which provides useful information for the selection of the contact model as well as the characteristic analysis method for an accurate analysis of TWUSMs [15]. Sattel et al. [4] proposed a planar contact model for the stator-rotor interaction and the results show that preload has influence on the resonance frequency of the operational eigenmode.
A visco-elastic contact model was reported by two groups. Storck and Wallaschek [7] proposed a visco-elastic contact model. In the model, the friction material (also called contact layer) is described by a viscoelastic foundation model. Their research gives better understandings of the contact problems in TWUSM. Qu et al. [16] used a viscoelastic model for a TWUSM with friction material on stator teeth surface. The simulated torque-speed curve shown that the calculated speed was close to the measured ones when the torque is small, but the difference became large with the increase of torque.
The preload and load torque are the two key operate parameters of TWUSM and have strong effects on both the contact of stator/rotor and the vibrations of stator. The effects on the contact of stator and rotor could be solved by force analysis and kinematic analysis. Unfortunately, it is difficult to find the exact relationship between the two key operate parameters and the vibrations of stator using an analytical method or a numerical method. In Storck’s research, the vibration amplitudes of stator were estimated via sensor voltage during operation [7] and in Qu’s research the vibration amplitude of stator was taken as a constant value [16]. The actual vibration of a stator during the operation of a TWUSM was unknown.
In this paper, the effects of preload and load torque on vibrations of stator were investigated. A laser Doppler vibrometer was used to measure the vibration velocities of stator when the motor is running. The viscoelastic contact model was analyzed, and then preload-amplitude coefficient and torque-amplitude coefficient were proposed to obtain the effective drive capacity of stator applied on rotor. The two coefficients were calculated based on experimental data and the viscoelastic contact model. Finally, the contact model considering preload and load torque effects was established and the performances of the motor were analyzed using the proposed contact model.
Effect of preload and load torque
Motion and force analysis
Motion and force analysis of particle in contact zone (a) the contact zone; (b) force analysis of particle A in driving subzone and (c) force analysis of particle A in braking subzone.
There is one driving subzone and two braking subzones within one contact zone, the distribution of subzones is shown in Fig. 1. Particles in driving subzone, whose tangential velocity component
Particle A is located in the braking subzone when torque
where
where
The velocity of rotor
where
Subtract Eq. (1) from Eq. (3):
Assume that the pressure distribution does not change and yields
Insert Eq. (6) in Eq. (5), yielding
then
Similarly, we can get
Test schematic of stator amplitude.
where
Equations (8) and (9) indicate that after the load torque increasing, the forces acting on the same particle is changed and the movement trajectory of the particles would be different. However, these changes were ignored in most contact model of TWUSM and no suitable method was proposed to calculate the exact values of the changes in the contact zone.
The preload would change the size of contact zone and pressure distribution. In most contact models, the size of contact zone and pressure distribution could be calculated by different preloads, but the vibrations of stator were assumed to be constant. In this paper, the effects of preload and load torque on the vibrations of stator would be tested and a contact model considering the effects would be proposed.
In this section, the stator vibrations in the running state of motor were measured to analyze the effects of preload and load torque. A TRUM60P motor produced by Jiangsu Chunsheng Ultrasonic Motor Co., Ltd was used in this investigation. Because the teeth of stator are covered by the shell and rotor in a complete TWUSM, the stator vibration is difficult to measure. In order to measure the stator vibration, a test device was designed and produced. The principle of the test device is shown in Fig. 2a. The shell of motor was taken off and instead by an equivalent shell for the loading of preload. The pressure sensor was used to measure the preload. The stator tooth surfaces are covered by the rotor when the motor is running, so three metal pits were bonded beside stator teeth and used as measure points, as shown in Fig. 2b and c. A laser Doppler vibrometer (PSV-400-M2, Polytec) was used to measure the stator vibrations. First, the vibrations of three test points on metal pit and tooth of free stator shown in Fig. 2c were measured.
The vibration velocities of the three test points in 200
Vibration velocity curves of 3 test points of free stator.
The velocities of test point 1 of stator applied preload and load torque were measured, as shown in Fig. 4. The velocities in 10 ms were collected and 100
vibration velocities of (a) free stator and (b) FT analysis, (c) stator applied preload 200 N and (d) FT analysis, (e) stator applied 0.4 N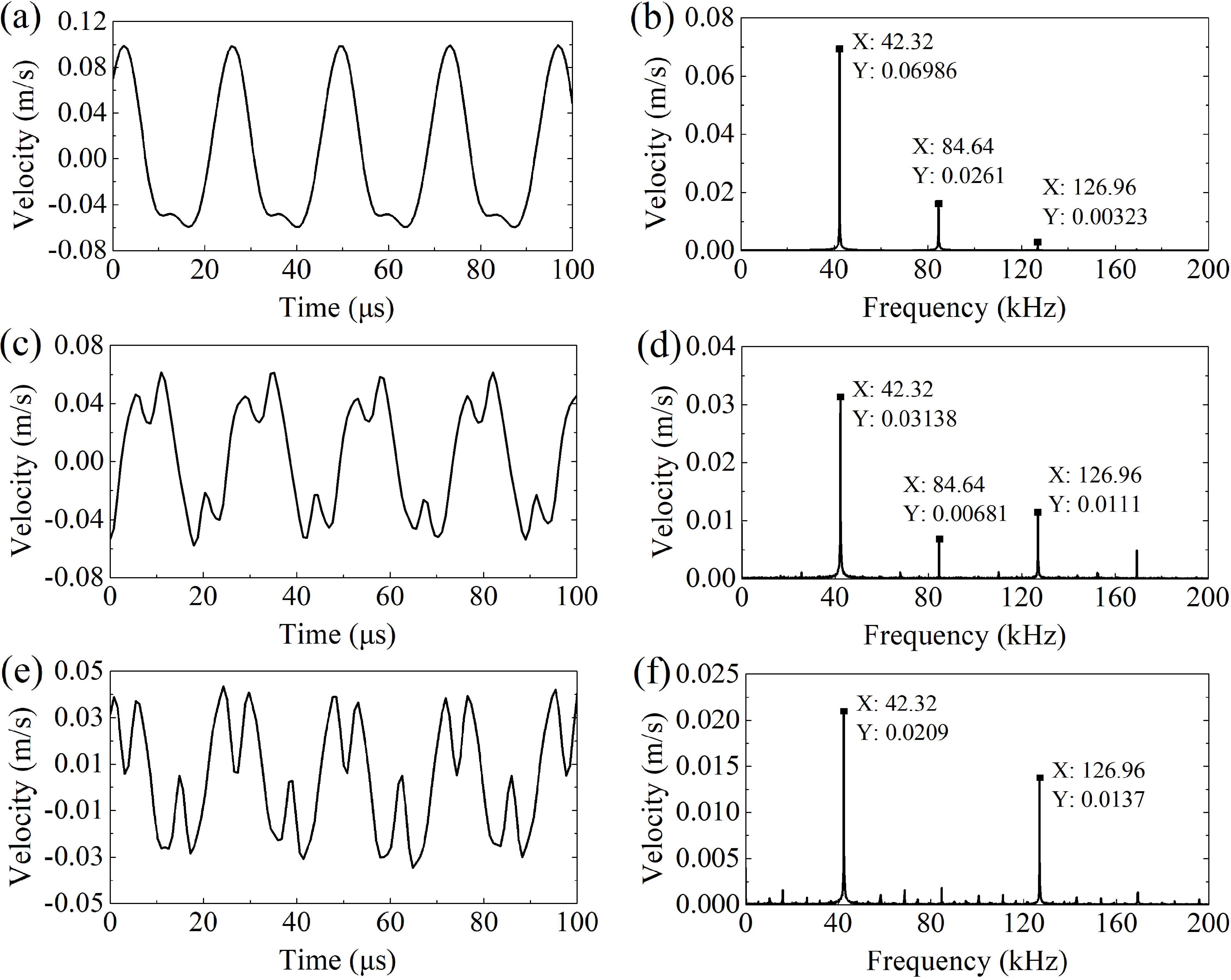
Moreover, the preload also has effect on the resonance frequency of stator. The impedance characteristics of stator applied preload of 200 N to 300 N were measured using an impedance analyzer (Agilent 4294 A), as shown in Fig. 5. The resonance frequency shows a slight downward trend with the increase of preload. In a TWUSM, the preload would decrease as the wear of contact layer. Considering the vibrations of stator are strongly correlated with the resonance frequency, this slight change should not be ignored.
Impedance characteristic of the stator.
In contact models, the vibration amplitude is the key parameter, which determines the drive capability of stator. The drive capability of stator is not only related to vibration amplitude of stator but also the movement trajectories of particles on stator surface. However, the actual motion trajectories of the particles are difficult to obtain. In this paper, we tried to find a simple way to solve this problem. Two coefficients were proposed to modify the drive capability of stator applied different preloads and load torques.
The friction material (also called contact layer) usually is described by a viscoelastic foundation model with stiffness (
(a) The contact of stator and rotor, (b) the normal force analysis and (c) the tangential force analysis.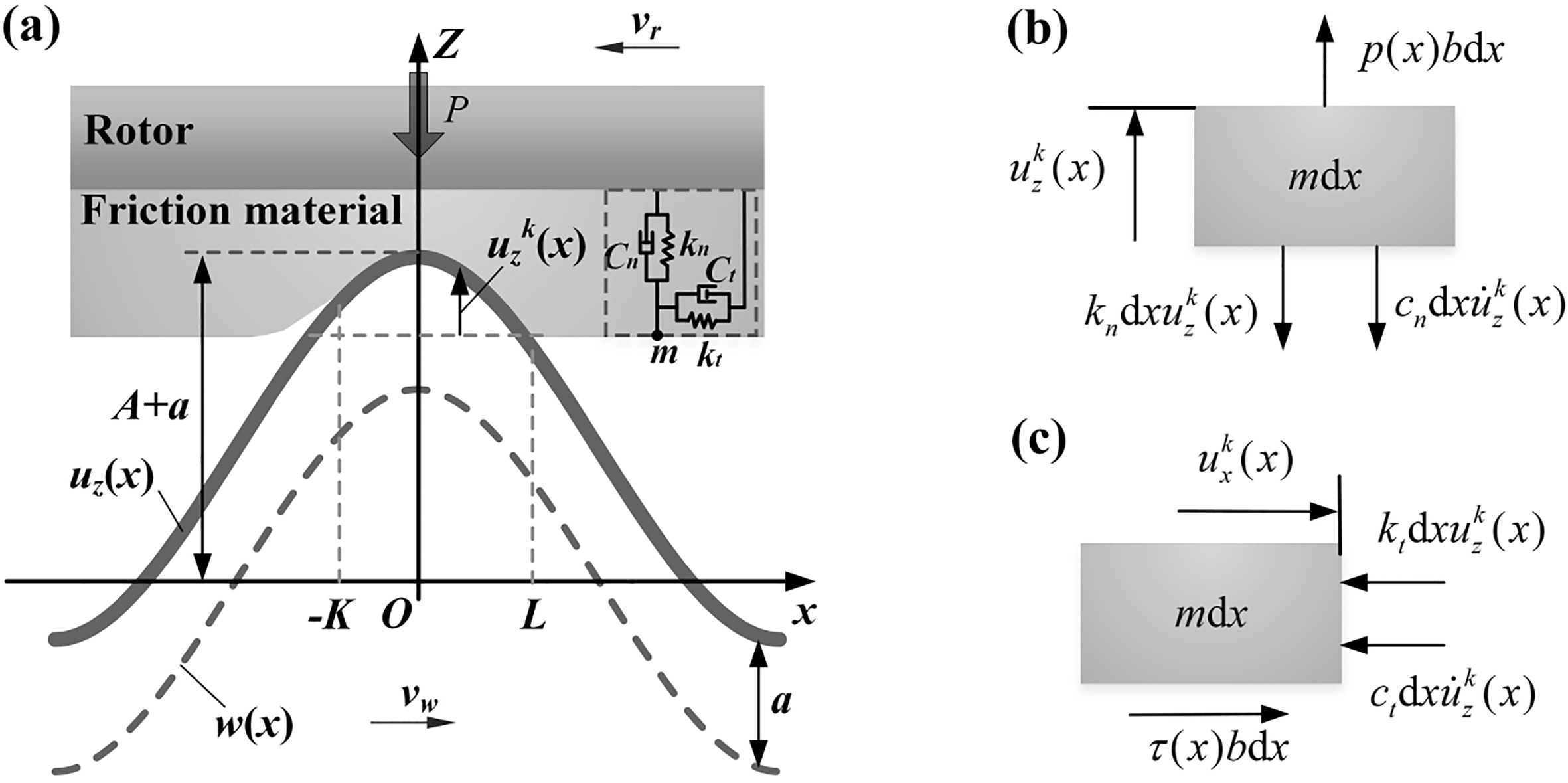
According to Fig. 6, the deformation
Then the normal pressure
The normal force acting on the stator is given and written as
There are slip zone and stick zone in one contact area according to the relationship of the contact layer velocity
Newton’s second law for an infinitesimal small contact layer element (Fig. 6c) gives
After derivations, the tangential stress could be written as
Where
Then the motor torque
Where
Variations of amplitude with frequency.
According to the calculation process of the viscoelastic contact model, the stator amplitude
Preload-amplitude coefficient
The preload-amplitude (P-A) coefficient
The amplitude of free stator could be obtained by finite element analysis or measurement. The equivalent amplitude
The amplitude of free stator is obtained by harmonic response analysis, as shown in Fig. 7. The drive frequency, usually greater than resonance frequency, is 42.3 kHz in this investigation and the amplitude of free stator is about 1.2
Polynomial fitting parameters of P-A coefficient
Torque-speed characteristics of the TWUSM.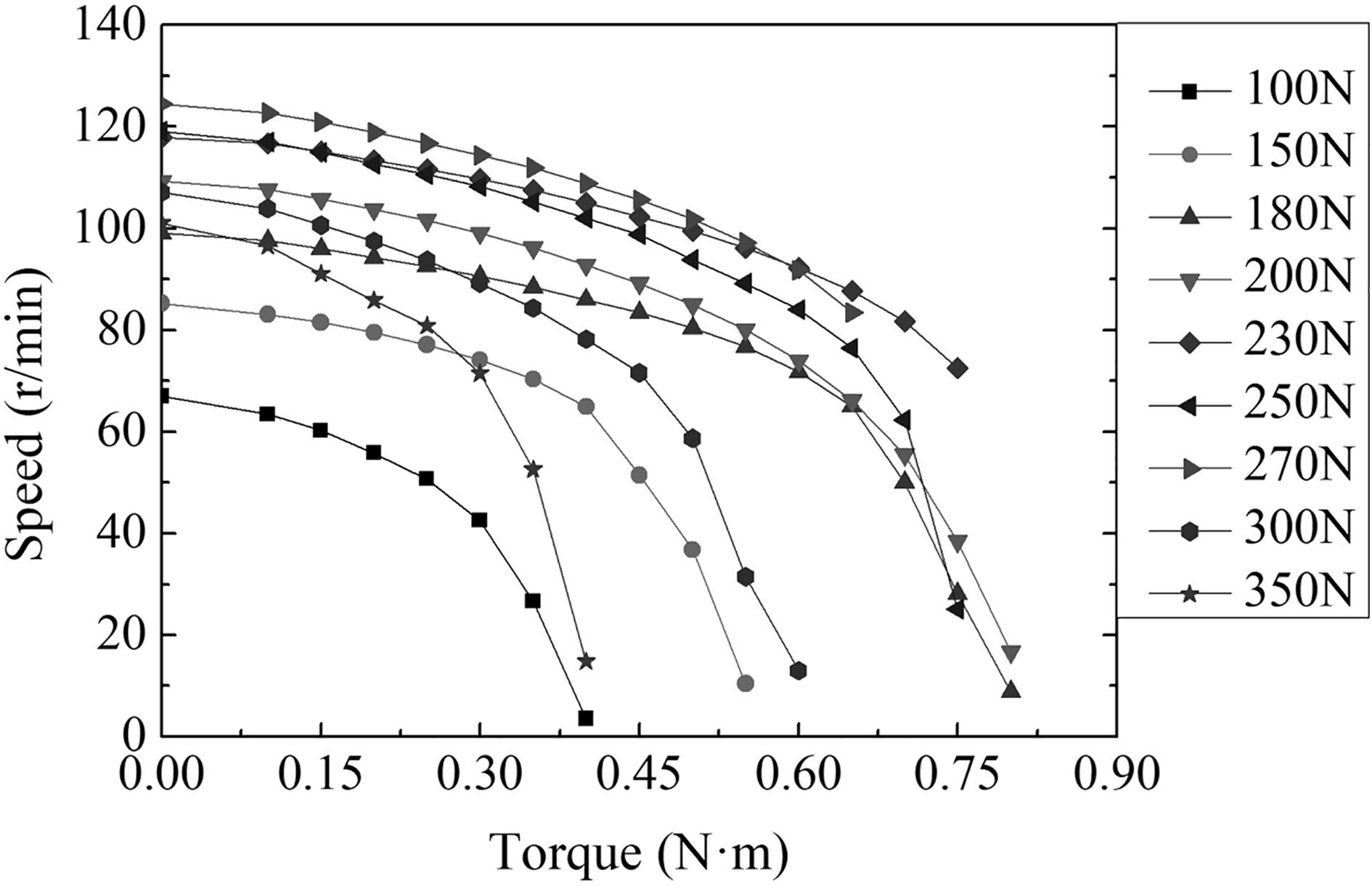
The speed-torque characteristics of the motor applied different preload were measured, as shown in Fig. 8. These speed-torque curves were used to calculate the equivalent amplitude. The values of preload and no-load speed were inserted in the calculation process of contact model. Here, the load torque is zero. The equivalent amplitude could be obtained by the calculation. The preload-amplitude coefficients with different preloads were calculated and 4 order polynomial was used to fit the coefficients, as shown in Fig. 9.
Calculated P-A coefficient.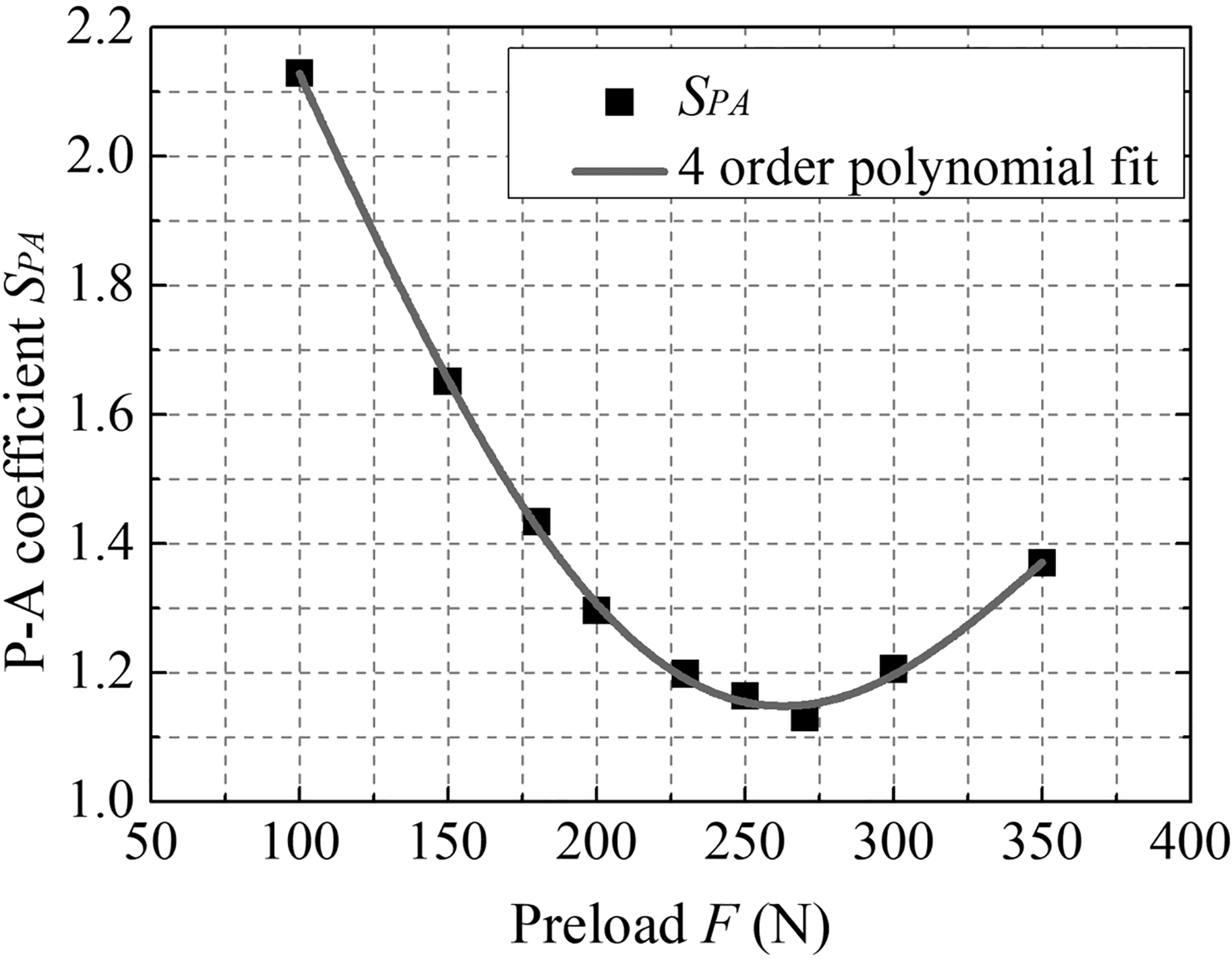
According to Fig. 9, the P-A coefficient is large when the preload is small, which indicates that the drive capability of stator applied small preload is exaggerated in the viscoelastic contact model owing to the oversimplifications. As the preload increased, the P-A coefficient decreases, which shows the drive capability of stator becomes strong. However, when the preload is over 250 N, the P-A coefficient increases and the drive capability of stator begins to decline. The P-A coefficient was fitted by 4 order polynomial. The parameters are shown in Table 1. The adjusted coefficient of determination (Adj.R-Square) is 0.9979, the residual sum of squares (RSS) is only 8.53e-4, which shows good fitting. The P-A coefficient could be expressed as
The torque-amplitude (T-A) coefficient is defined as the ratio of equivalent amplitude
When the load torque is zero,
The values of preload, load torque, speed and P-A coefficient were inserted to the calculation process of the viscoelastic contact model. The equivalent amplitude
T-A coefficients applying preload of (a) 200 N and 250 N, (b) 150 N and 300 N.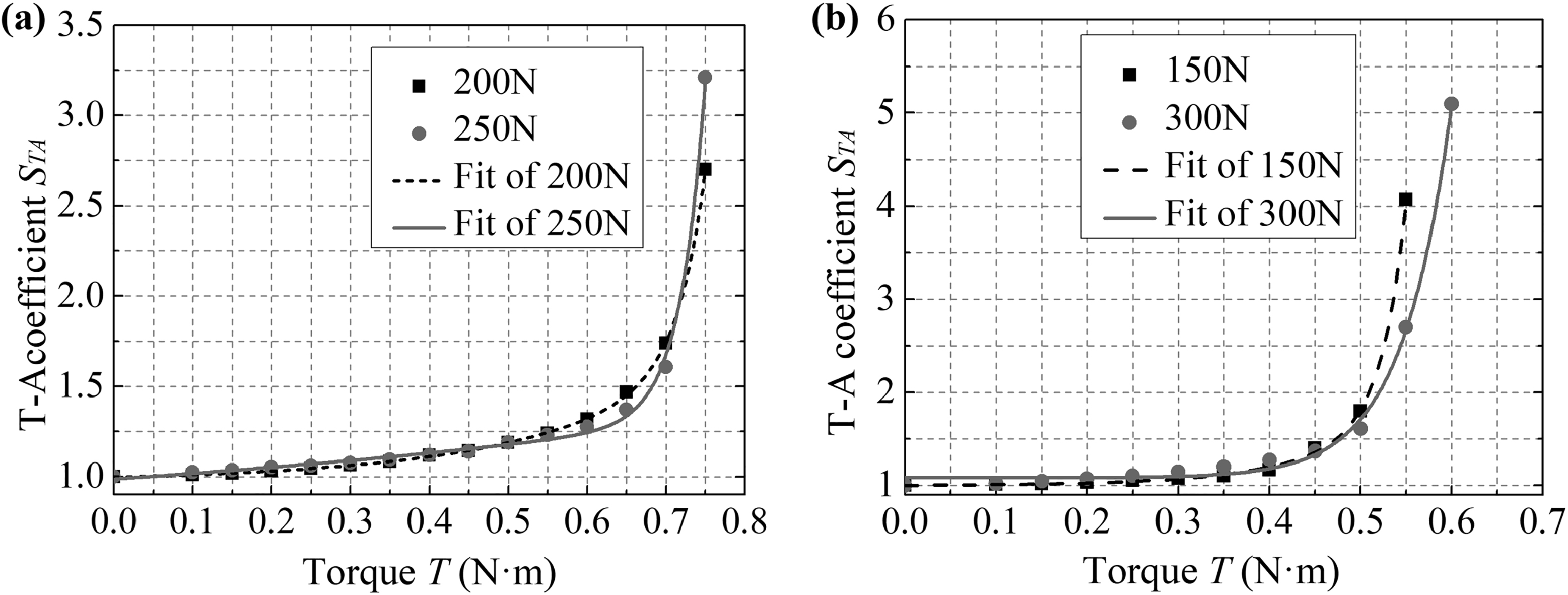
The coefficients were fitted by two Bi-exponential decay functions and the T-A coefficient could be expressed as
Bi-exponential decay function fitting parameters of T-A coefficient
The fitting parameters are shown in Table 2. The Adj.R-Squares are all greater than 0.995, which indicates the fitting of the T-A coefficient is satisfactory. Using the fitting values, the equivalent amplitude
From Fig. 10, the T-A coefficient first increase slowly with the increase of torque, and then increase rapidly when the torque is close to stall torque. The results indicate that the load torque could reduce the drive capability of stator, especially when the load torque is large. It could be also found that the T-A coefficient curve of 200 N is very close to the curve of 250 N (Fig. 10a) and the curve of 150 N is very close to that of 300 N (Fig. 10b) which indicates the T-A coefficient changes little in range of 200 N to 250 N. Therefore, it is unnecessary to calculate the T-A coefficients applying all preloads. The TWUSM used in this investigation is 60 type (the diameter of stator is 60 mm) and the preload is in the range of 180 N to 300 N. The T-A coefficient could be selected based on the following suggestions:
Select the T-A coefficient of 200 N when the preload is in range of [175 N, 225 N); Select the T-A coefficient of 250 N when the preload is in range of [225 N, 275 N); Select the T-A coefficient of 300 N when the preload is in range of [275 N, 325 N); In other special cases, select the coefficient according to the similar suggestions or calculated the coefficient when necessary.
Now the P-A coefficient and T-A coefficient are known, then the equivalent amplitude
Inserting Eq. (24) in Eq. (10) to Eq. (19), the stator amplitude
Verification of new viscoelastic contact model applying preload of (a) 200 N and 250 N, (b) 230 N.
Figure 11 shows the verification results of new viscoelastic contact model applying preload 200 N, 250 N and 230 N. The T-A coefficient of preload 200 N and 250 N are fitting values of the corresponding preload, so the calculated values show good agreement with the measured ones. According to the selection suggestions, the T-A coefficient of preload 230 N is selected as the coefficient of 250 N. The calculated values also show good agreement with the measured ones. The calculated error increases with the increase of torque owing to the change rate of T-A coefficient is relative large with large torque. Comparing to the calculated values of old contact model in which the stator amplitude is a constant, the new contact model gives more accurate results.
In order to validate the new contact model, the speed-torque characteristics of the motor in the whole life of friction material were calculated. The whole life of friction material means the process of the friction material beginning to work until failure because of wear.
Simulation results of the model with different friction material (FM) thickness.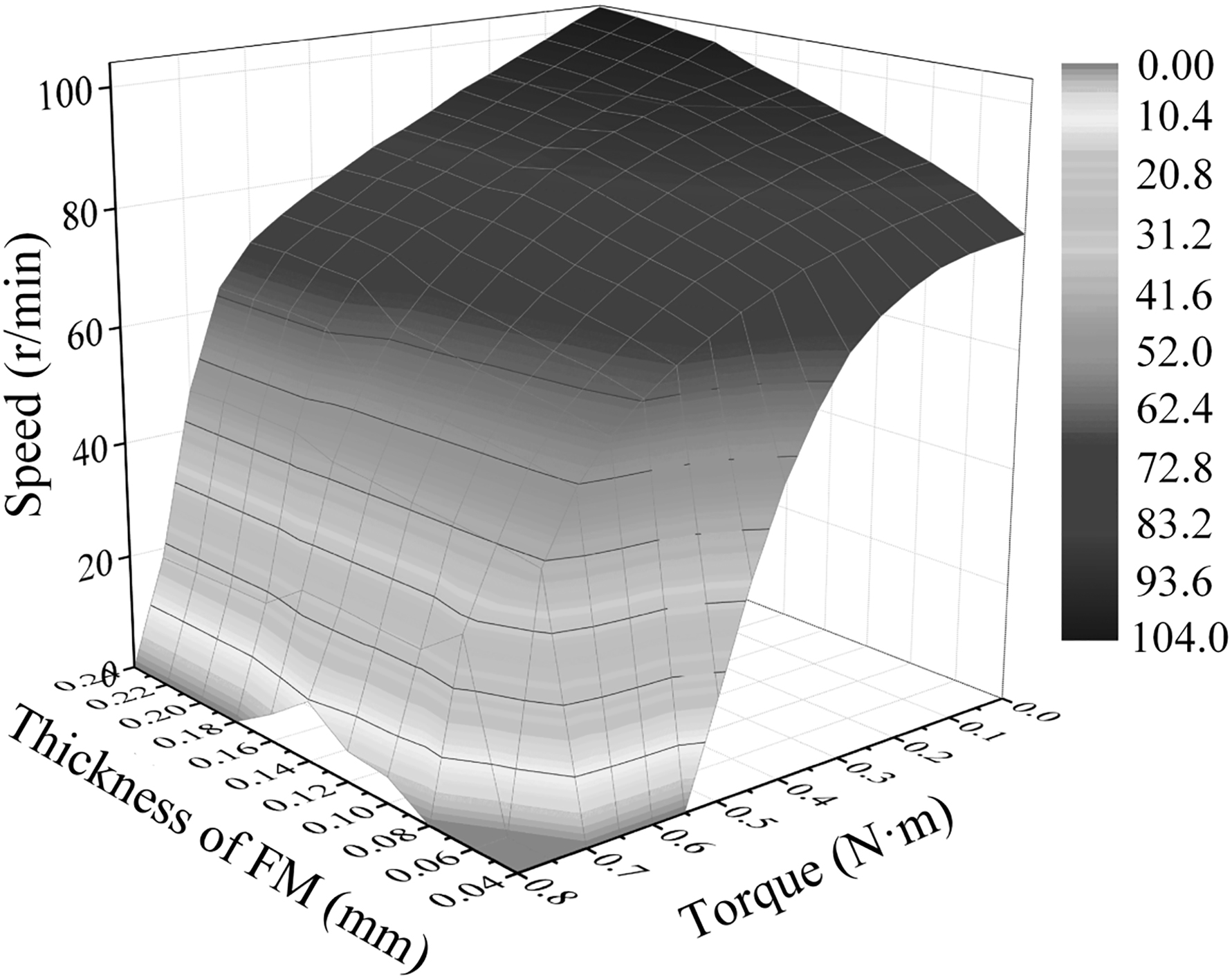
Comparison of simulation results of viscoelastic contact models with friction material thickness of (a) 0.2 mm and (b) 0.1 mm.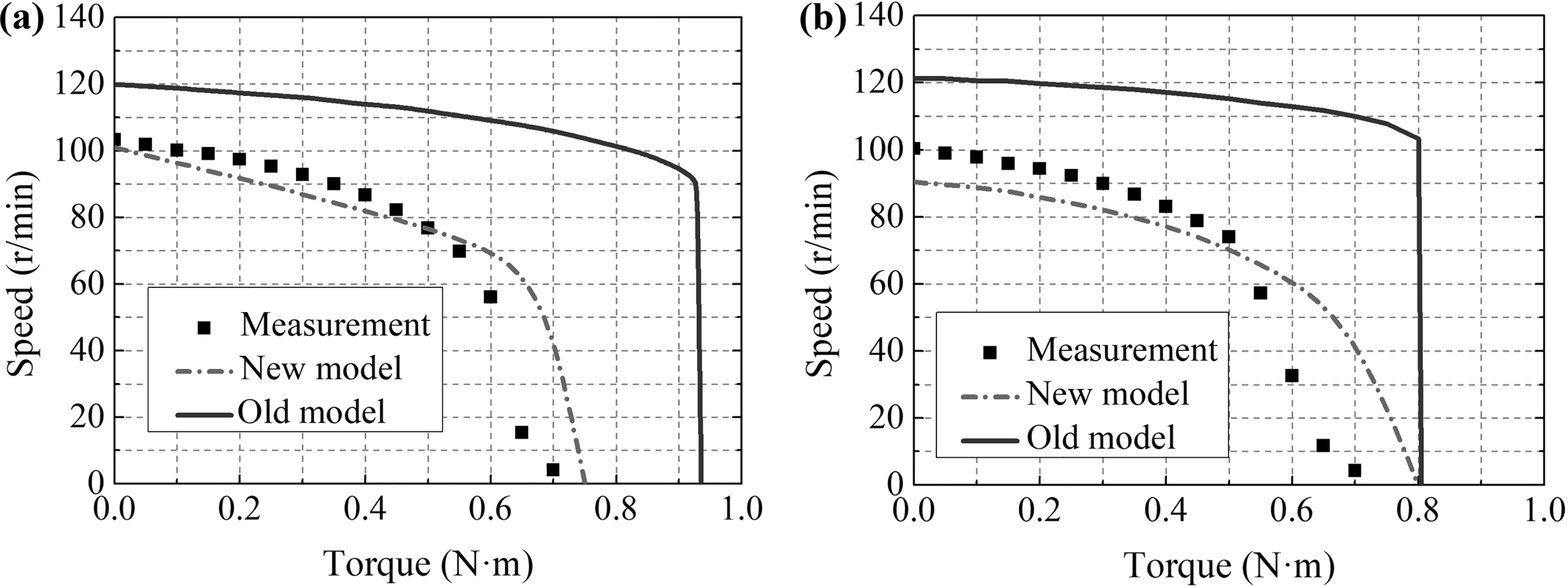
The initial conditions of TWUSM was taken as: the thickness of friction material was 0.24 mm, the preload was 250 N and the stiffness of preload was 400 N/mm. The preload would decrease with the wear of friction material, and the stiffness of preload is the rate of decrease determined by the structure of the motor. The speed-torque characteristics of the motor were calculated using the new contact model, as shown in Fig. 12. The no-load speed decreases with the wear of friction material, and the rate of decrease first small and then becomes large. The stall torque is larger than 0.8 N
The comparison of speed-torque characteristics of calculated results and measurements are shown in Fig. 13. When the thickness of friction material is 0.2 mm, the preload is 234 N, then the P-A coefficient could be known from Eq. (21). According to the select suggestions of T-A coefficient, the T-A coefficient of 250 N was selected. For the thickness of 0.1 mm, the preload is 194 N, and the T-A coefficient of 200 N was selected. From Fig. 13, the calculated values show a good agreement with the measured ones, and the accuracy of new contact model is higher than the old contact model. The new contact model proposed in this paper basically meets the simulation requirements of TWUSM.
Preload and load torque have strong effects on the vibrations of stator, which was proved in this paper by the analysis and measurements. Preload-amplitude coefficient and torque-amplitude coefficient were proposed to correct the actual drive capacity of stator applied on rotor. The two coefficients were obtained by inserting the measurement values into the visco-elastic contact model. Then, the contact model considering preload and load torque effects was established. Using the new contact model, the speed-torque characteristics of the TWUSM were calculated. The results shown good agreements to the measured values.
The preload-amplitude coefficient and torque-amplitude coefficient explore the variation trends of drive capacity of stator with preload and load torque, respectively, which is helpful to select the appropriate operated conditions. The new contact model could also be used to predict the performances of TWUSM in practical applications.
The preload-coefficient and torque coefficient calculated in this paper are suitable for the TRUM60P motors. However, the two coefficients for other types of TWUSM might be different, which need to be calculated in the future to expand the applications of the proposed contact model.
Footnotes
Acknowledgments
We are grateful to the National Natural Science Foundation of China (No: 51175104), Zhejiang Provincial Natural Science Foundation of China (No: LQ18E050002) and Ningbo Natural Science Foundation (No: 2017A610076) for providing research funds and this study was sponsored by K.C.Wong Magna Fund in Ningbo University.