
Abstract
Aiming at the unbalanced vibration problem of bearingless induction motor caused by the rotor mass eccentricity, an adaptive LMS extraction method of unbalanced displacement is proposed. Firstly, the characteristics of unbalanced displacement signal, the influences of step size factor on the tracking speed and the steady state tracking error are analyzed; then in order to solve the contradiction between tracking speed and steady state tracking error, and achieve the quick extraction of unbalanced displacement, a convenient nonlinear function of step size factor is adopted. On this basis, an unbalanced vibration control system of a bearingless induction motor is constructed; simulation verification and analysis are made. The simulation results have shown that the unbalanced displacement signal can be extracted quickly in dynamic status, a higher extraction precision of unbalanced displacement can be obtained in steady status; based the proposed extraction method of unbalanced displacement signal, the magnetic suspension control performance of a bearingless induction motor can be improved greatly.
Keywords
Introduction
Based on modern control theory, the conventional motor supported by mechanical bearing is widely used in industrial filed, but it cannot meet the needs of long time and high speed operation. Then, the magnetic bearing motor, i.e. the motor supported by magnetic bearings is widely developed and applied in high speed drive field [1, 2, 3]. But it still has some disadvantages, such as more magnetic suspensions cost, over-speed difficulty, etc. Bearingless motor is a new type of AC motor, which is proposed based on the comparability in the structure between magnetic bearing and the stator of conventional AC motor [4, 5, 6]. For most bearingless motor, there are two sets of stator windings with different number of pole pairs. The two sets of stator windings include torque windings and suspension windings. When the currents with same angle frequency are injected into the two sets of stator windings, by the coupling interaction between the air gap flux-linkages generated by two sets of stator windings, a stable radial electromagnetic force can be generated. The radial electromagnetic force can be used to support the bearingless rotor [7, 8, 9, 10]. Bearingless motor doesn’t need lubrication, has no friction and no mechanical noise, and has higher critical speed. Then it is more suitable for high speed drive, and has a wide application prospect in aerospace, material sealing transmission and advanced manufacturing fields [10, 11, 12, 13, 14]. Now, bearingless motor has become a research hotspot [15, 16, 17, 18, 19]. Bearingless motor is a nonlinear, multivariable and strongly coupled object, it is difficult to accurately model. In order to overcome the influence of unmodeled dynamics, a nonlinear dynamic decoupling method based on modern control theory is necessary [18, 19, 20]. And then, the neural network, fuzzy control, robust control and inverse system theory have a broad application prospects in the control system of bearingless motor [4, 5, 7, 19, 20, 21]. In addition, in order to improve the reliability of bearingless motor system, the fault tolerant control and unbalanced vibration control have become research hotspots [19, 22, 23, 24, 25, 26]. In this paper, aiming at the unbalanced vibration control of a bearingless induction motor, the unbalanced displacement extraction algorithm of rotor is mainly discussed.
As a rotary motor, due to the uneven material, assembly error and limited machining accuracy, the mass eccentricity of rotor is unavoidable. Then during the suspension operation process of rotor, an unbalanced excitation force would be generated inevitably, which has the same rotational angular frequency with the rotor. The unbalanced excitation force inevitably leads to the unbalanced vibration of rotor, and even to the extent that collision between stator and rotor is happened. Therefore the unbalanced vibration of rotor is one of the key problems to be solved in the practical application of bearingless motor. About the unbalanced vibration control of magnetic suspension rotor, the existing studies are mainly concentrated in the control system of magnetic bearing motor [23, 24, 25]. The existing vibration compensation ideas mainly include two kinds [1, 24]. One idea is to compensate for the unbalanced displacement. I.e. the periodic unbalanced component is filtered out from the feedback signal of radial displacement, and the rotor is forced to rotate around its inertia center. Another idea is to compensate for the unbalanced excitation force, and force the rotor to rotate around its geometric center. No matter what kind of vibration compensation idea is adopted, it is necessary to accurately obtain the unbalanced displacement signal. Therefore, the extract the unbalanced displacement signal is an important step. About the unbalanced vibration control of bearingless motor, relevant researches are just started, and mainly concentrated in bearingless synchronous reluctance motor and bearingless permanent magnet motor [27, 28, 29]. Reference [28] used the rotation transformation and filtering method to extract the unbalanced displacement of a bearingless permanent magnet motor. Reference [18] used a variable step size LMS algorithm to track the unbalanced displacement of a bearingless induction motor; but the specific function of step size factor is not given. Reference [23] used the variable step LMS algorithm to solve the contradiction between the convergence speed and the steady-state error; taking a bearingless switched reluctance motor as controlled object, the extraction and compensation control methods of unbalanced displacement are researched, the rotor is forced to rotate around its inertia center; but the selected variable step size function is complex.
In this paper, the bearingless induction motor is taken as a controlled object, in order to solve its unbalanced vibration problem, a convenient LMS adaptive extraction algorithm of unbalanced displacement is researched. By adjusting the step size factor with a convenient nonlinear function, the tracking speed and the steady-state tracking error are balanced dynamically; on this basis, a feedforward controller is constructed to compensate the unbalanced excitation force. The simulation results have shown that the proposed method can achieve the fast extraction of unbalanced displacement signal, and the unbalanced vibration of bearingless rotor can be effectively restrained. The outline of this paper is as follows: Section 1 is the introduction; Section 2 introduces the LMS extraction algorithm of unbalanced displacement; Section 3 gives the unbalanced vibration control system; Section 4 presents the simulation analysis of unbalanced displacement signal; Section 5 presents the research conclusion.
Extraction algorithm of unbalanced displacement signal
Characteristics of unbalanced displacement signal
The extraction of unbalanced displacement signal is a key step to control the unbalanced vibration of rotor. The characteristics of the unbalanced vibration signal are analyzed in brief firstly. In rotational motion, the rotor mass eccentricity excites an exciting force whose direction is the same with that of the mass eccentricity. Study results have shown that the amplitude of exciting force is proportional to the square of rotating speed; and in
Where:
Substituting the unbalanced excitation force into the motion equation of bearingless rotor [24]; the expression of unbalanced vibration displacement can be obtained as follow:
Where:
From Eq. (2), it can be seen that under the action of periodic unbalanced excitation force, the unbalanced displacement component along the stationary axis is a sine or cosine signal, whose frequency is the same with the rotational speed; the synthetic motion trajectory of rotor axis is a circle. In addition, because the amplitude of unbalanced displacement is proportional to the square of rotational speed [23, 28, 29], when the rotational speed reaches a certain degree, the amplitude of unbalanced displacement may exceed the air gap length of emergency bearing, and the collision between stator and rotor may occur.
From the main radial displacement signal, the LMS adaptive filter can eliminate the noise signal related to the reference input [23, 24, 30, 31]. In the control system of a bearingless motor, the radial displacement signal of bearingless rotor is composed of a random displacement signal
Figure 1 shows the tracking and extraction principle of unbalanced displacement. In Fig. 1, radial displacement signal
Setting the reference signals as follows:
Where: the amplitude of the reference signal can be arbitrarily selected. But for convenience, the amplitude of reference signal is set 1.0.
Setting the updating algorithm of weights as follows:
Where:
Adaptive LMS extraction of unbalanced vibration displacement signal.
Selecting the tracking error as follow:
Then the output of adaptive LMS filter can be expressed as follow:
If
By analyzing the function, it can be known that its zero point is
In the adaptive LMS filter, the step size factor
In order to solve the contradiction between tracking convergence speed and steady state tracking error, during the updating process of weights, a variable step size is used to replace the fixed step size. More researches are focused on constructing the function relationship between the step size factor and the tracking error, so that the step size should be larger when the tracking error is larger, and the step size should be smaller when the tracking error is smaller. Common variable step size function includes sigmoid function, versoria function, and sampling function, etc. [23]. Relatively speaking, when the versiera function, sigmoid functions are adopted, it is easy to meet the need of fast tracking; but within a smaller tracking error range, the “slow regulation effect” of step size is limited [23, 30, 31]. When the sampling function is adopted, within a smaller tracking error range, a better “slow regulation effect” of step size factor can be obtained; but when the tracking error increases, the tracking convergence speed is relatively low.
In this paper, in order to improve the rapidity of unbalanced vibration control system, and in order to improve the slow regulation effect of step size in steady state, a novel nonlinear step size function is adopted. The nonlinear step size function can be expressed as follow:
Where:
Curve of step size factor function. (a) Parameter b 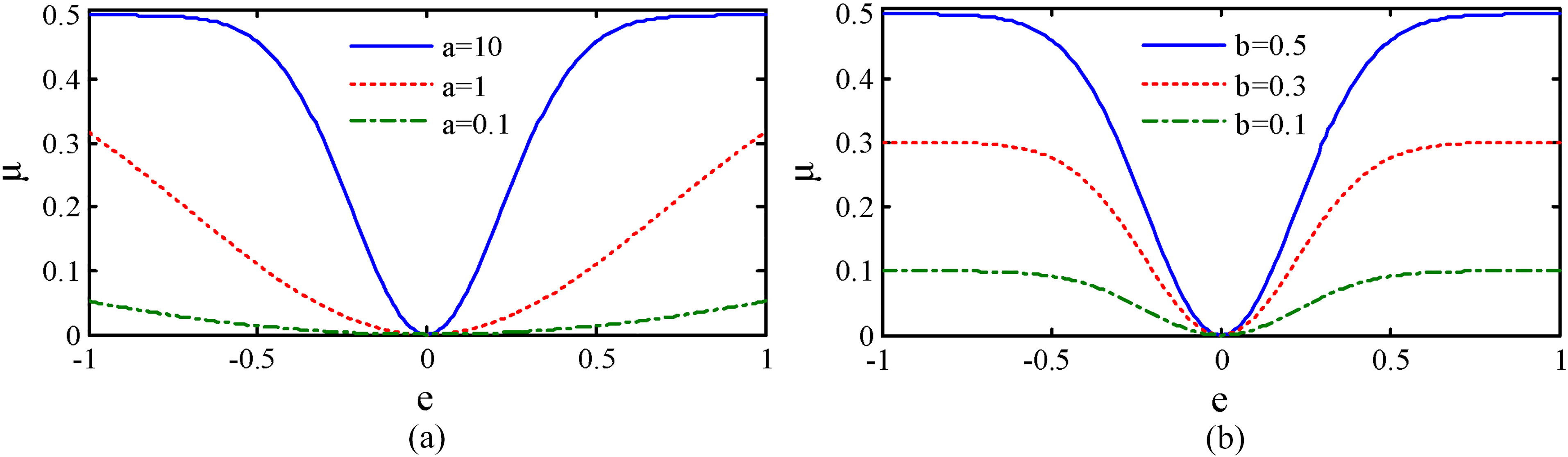
Using
The step size factor function Parameters “ In specific application, the appropriate
An inverse dynamic decoupling strategy is adopted in the control system of bearingless induction motor. In the control system, the
For the compensation control system of unbalanced displacement, just need to remove the unbalanced displacement signal from the radial displacement of rotor, the unbalanced displacement will not be controlled; then under the action of unbalanced excitation force, the bearingless rotor rotates around its inertia center. The relevant control is respectively simple, and will not be studied here. In this paper, based on the presented LMS extraction algorithm of unbalanced displacement, the compensation control of unbalanced excitation force would be mainly introduced.
Figure 3 shows the compensator structure of unbalanced excitation force, it is used to generate a compensation control force. The compensation control force is used to counteract the centrifugal excitation force generated by the mass eccentricity of rotor, and thereby eliminates the influence of unbalanced excitation force on the suspension control precision. The specific working principle can be concluded as follows:
Defining For By reverse rotation transformation for
Compensator structure of excitation force.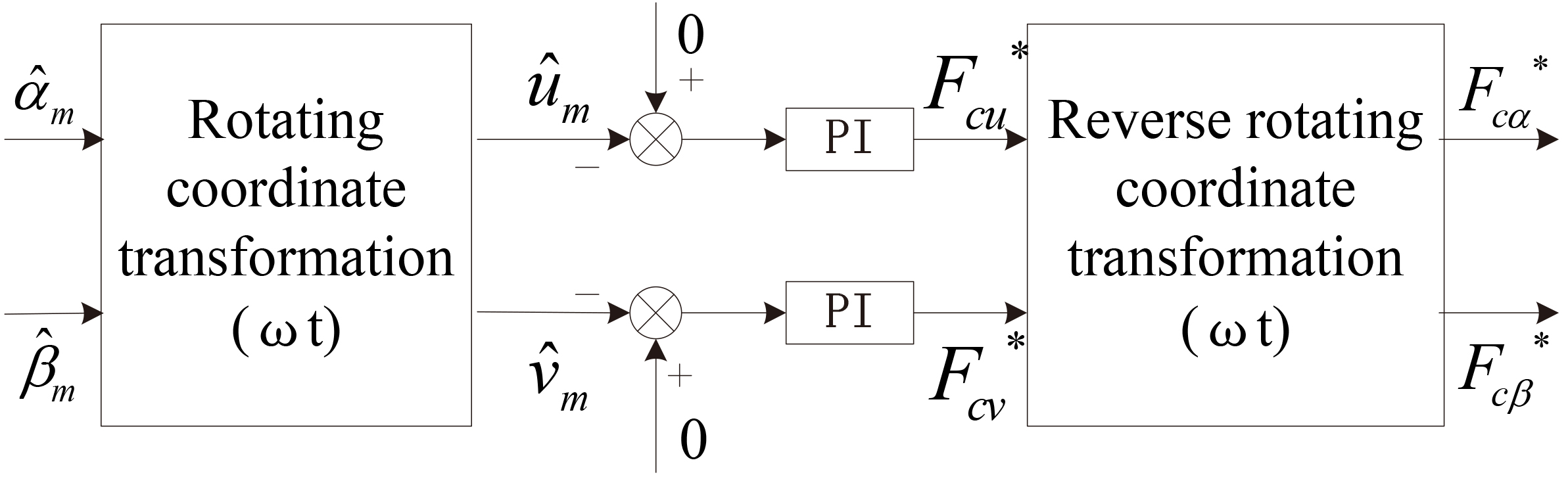
In this paper, an inverse system decoupling control strategy is adopted for the random displacement components, the control variables include suspension control current signals
Where:
In
Control system structure.
To verify the effectiveness of the unbalanced displacement extraction algorithm and the unbalanced excitation force compensation method, according to the system structure in Fig. 4, system simulation model is built by Matlab/Simulink toolbox. Relevant simulation verification and analyses are made.
The simulation conditions are set as follows: given speed
Displacement in 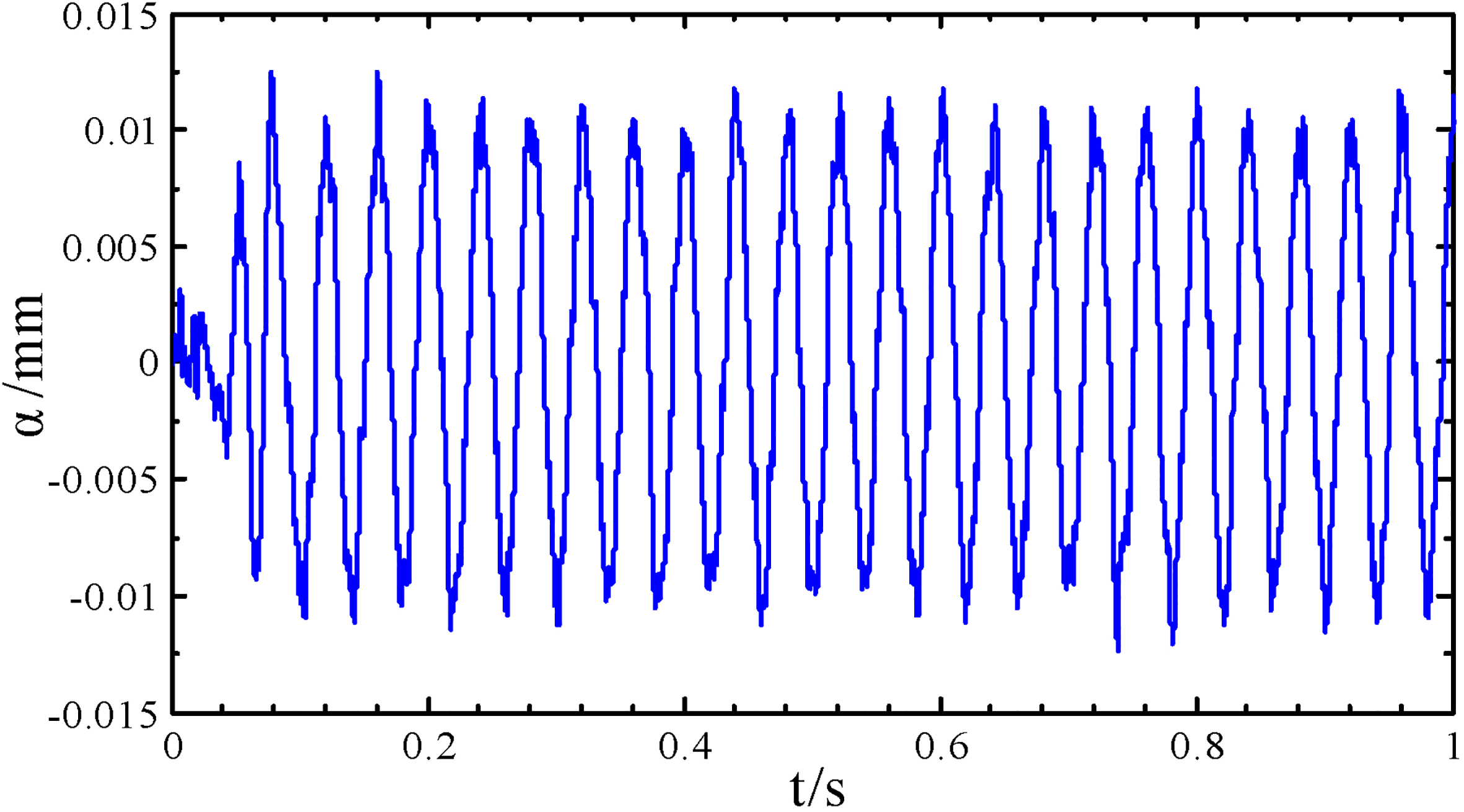
Tracking effect comparison of unbalanced displacement.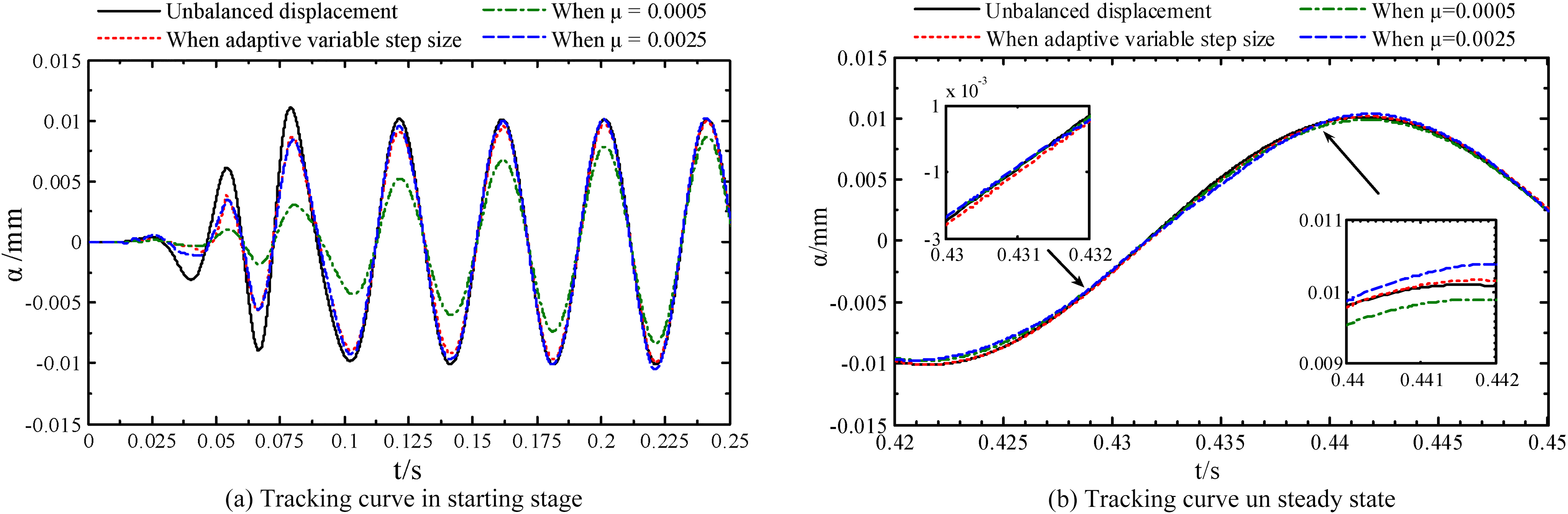
In order to verify the effectiveness of the presented LMS extraction method, the compensation force of unbalanced vibration is not added firstly. The bearingless rotor operates under the action of unbalanced excitation force, LMS adaptive filter is used to track the unbalanced displacement signal. The given radial displacement signals
From Fig. 5, it can be seen that when the unbalanced excitation force is not compensated, a periodic fluctuation in the radial displacement of rotor is presented obviously; under the setting conditions of simulation experiment, the amplitude of radial displacement fluctuation is about 10
Under the conditions of non gauss white noise signal, the displacement response curve is used for the baseline of unbalanced displacement. Adopting the presented algorithm, the unbalanced displacement signal in Fig. 5 is extracted, and then the extracted unbalanced displacement signal is compared with the baseline.
Absolute tracking error contrast curve in dynamic status before vibration compensation.
Under three step size factor conditions, Fig. 6 shows the contrast curves of extracted unbalanced displacements. The adopted step factors include a smaller step size factor 0.0005, a larger step size factor 0.0025 and the presented adaptive variable step size factor. In Fig. 7, the contrast curves of the absolute tracking error of unbalanced displacement are given. In order to observe the extracting effect of unbalanced displacement more directly, after the system reaches its steady state, the amplified contrast curves of absolute tracking error of unbalanced displacement are shown in Fig. 8.
Absolute tracking error contrast curve in static status before vibration compensation.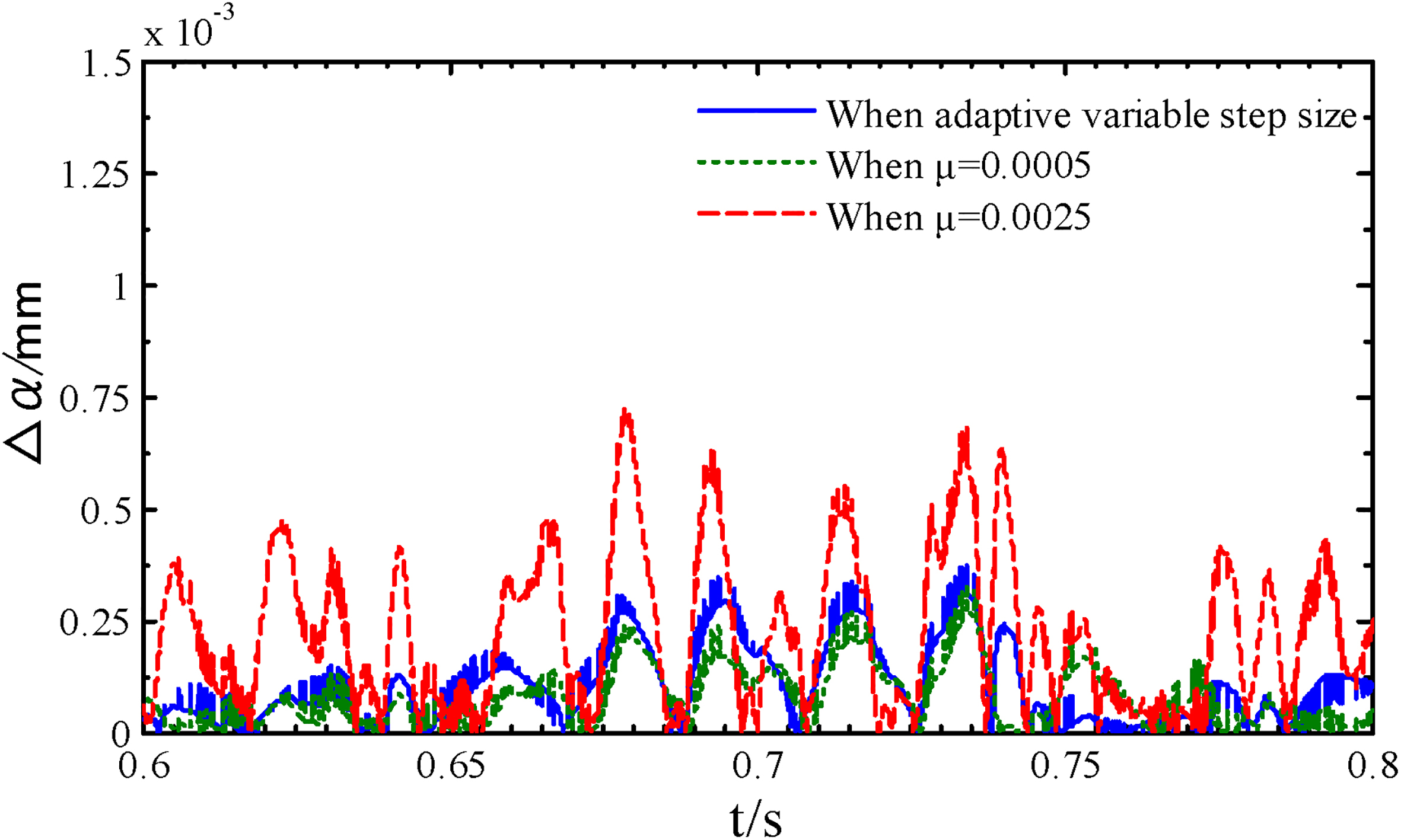
Displacement in horizontal direction after vibration compensation.
Contrast curve of absolute tracking error in dynamic status after vibration compensation.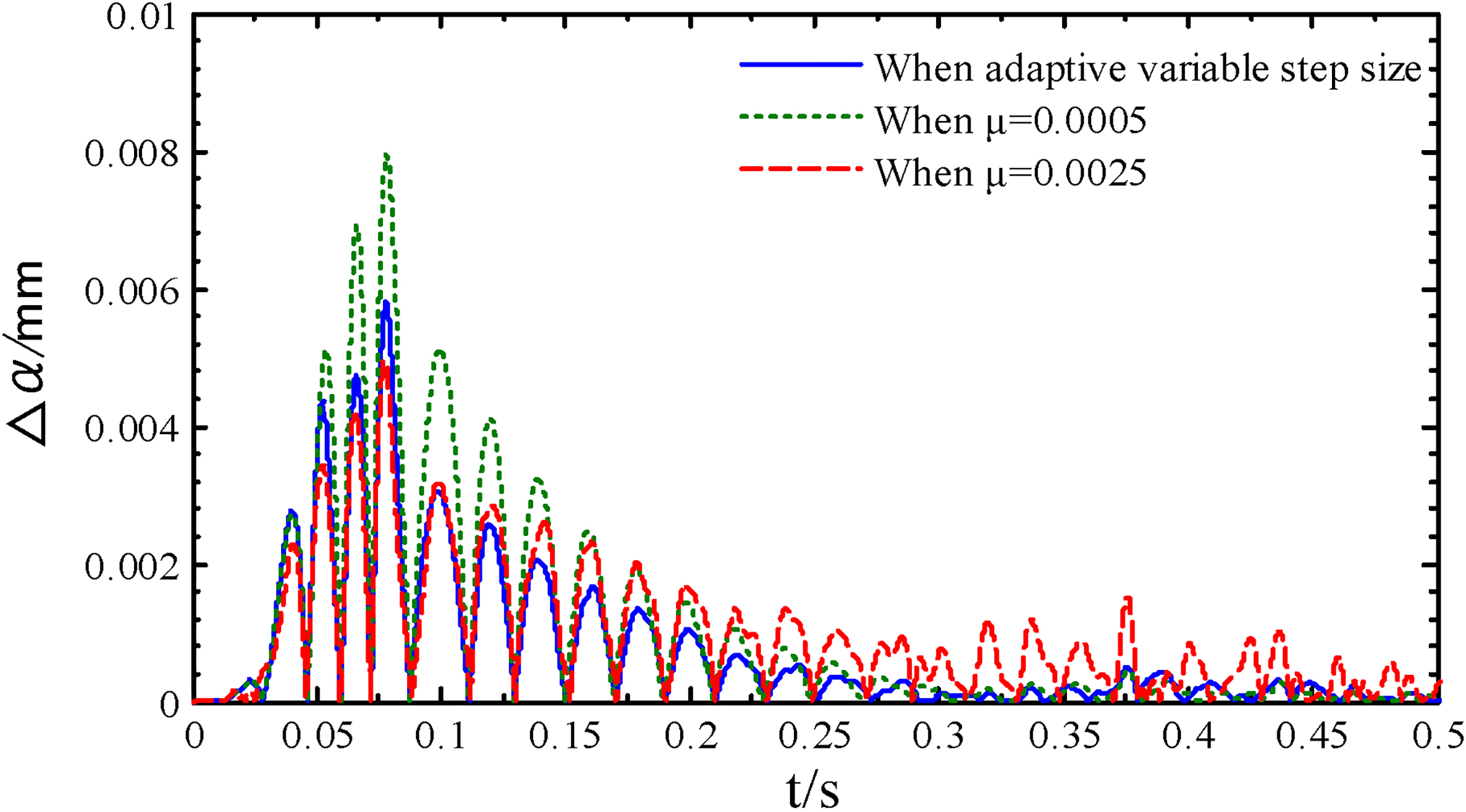
When the step size factor Compared with the LMS filter with fixed step size factor, when the presented LMS adaptive variable step size filter is used, and based on the given nonlinear step size function, the step size factor can be automatically changed, and a good tracking effect of unbalanced displacement signal can be obtained. That is to say that during the initial stage of motor start, or in the dynamic process of speed change, faster tracking speed and smaller dynamic tracking error of unbalanced displacement can be obtained; while in steady state, a higher tracking accuracy can be obtained. Therefore, in order to realize the reliable extraction of unbalanced displacement, the presented LMS adaptive variable step size filter is an effective way to solve the contradiction between dynamic tracking rapidity and steady-state tracking accuracy. The proposed method is effective.
Another point to note is that during the process of adjusting the variable step size factor adaptively, the magnitude order of tracking error
In order to further validate the effectiveness of the presented LMS extraction algorithm for the unbalanced displacement, and to further validate the vibration suppression effect, under the conditions of compensating the unbalanced excitation force, Fig. 9 shows the displacement response curve of a bearingless induction motor.
From the comparison between Fig. 9 and Fig. 5, it can be seen that after the unbalanced excitation force is compensated, there still exists a smaller amplitude fluctuation of radial displacement in the initial stage. The reason is that the extraction of unbalanced vibration signal and the establishment of compensation control force need a certain period of time. And then the amplitude of the unbalanced displacement just can be suppressed to a certain extent. With the establishment of vibration compensation control force, the unbalanced vibration of bearingless rotor is quickly suppressed. After the system reaches its steady state, there only exists a random radial displacement signal of bearingless rotor, the unbalanced displacement is completely eliminated, and the suspension control precision of bearingless rotor is greatly improved.
In order to analyze the influence of step size factor
Contrast curve of absolute tracking error in static status after vibration compensation.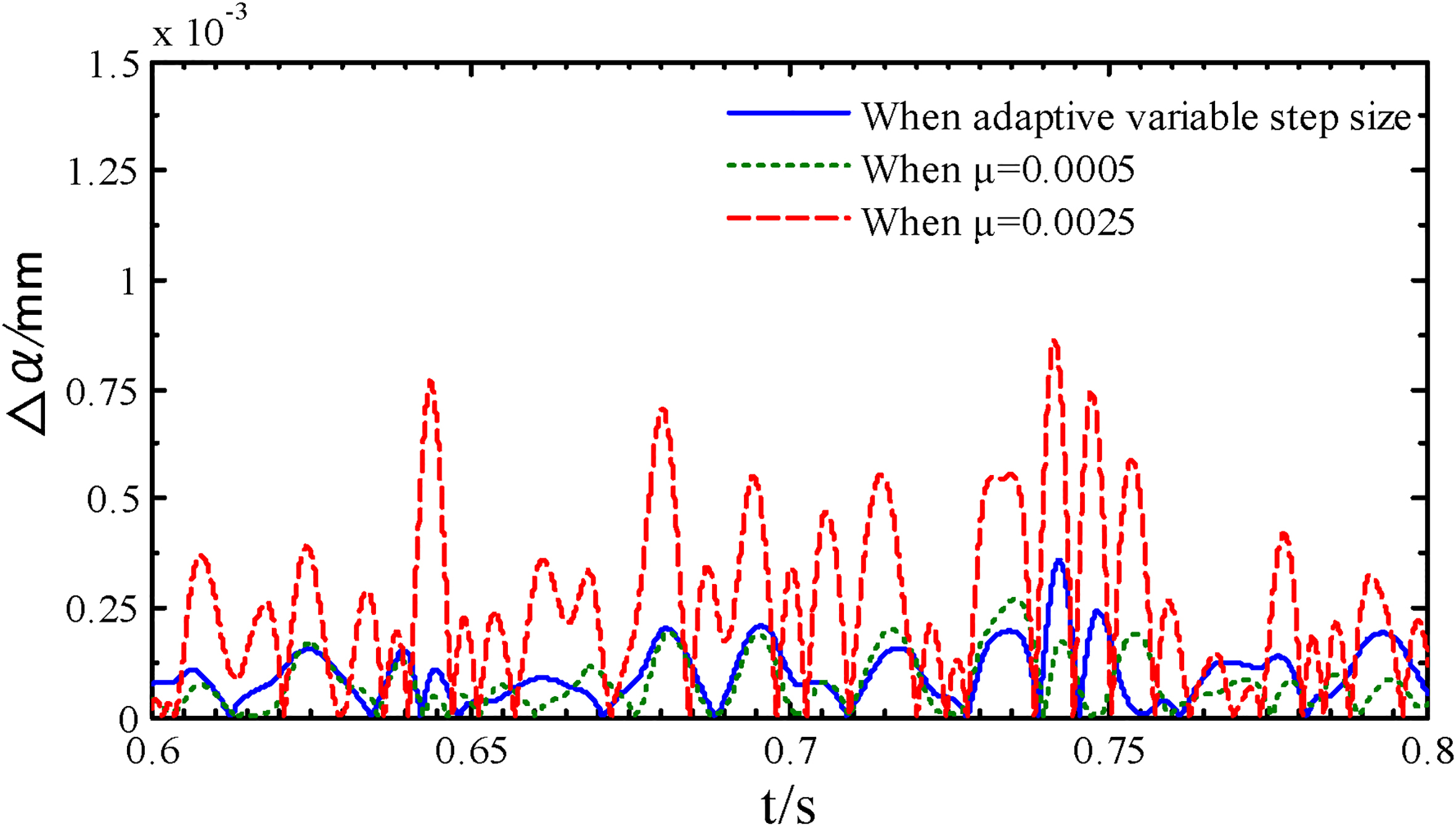
From Figs 9 to 11, it can be seen that when the presented variable step size LMS filter is used for the unbalanced vibration control of a bearingless induction motor, ether in the dynamic process or in the steady state, a faster tracking and extraction performance of unbalanced displacement can be obtained; more over, a higher magnetic suspension control performance can be achieved.
Aiming at the unbalanced vibration problem of a bearingless induction motor, the variation characteristics of unbalanced displacement signal are analyzed, a LMS adaptive filtering extraction algorithm for unbalanced displacement signal is proposed, the effect of step size factor on the tracking speed and steady state error is analyzed. And then, in order to adjust the contradiction between the dynamic tracking speed and the steady state tracking error, and realize the faster and more precise extraction of unbalanced displacement, a convenient and practical variable step size function is presented. Based on this, in order to restrain the unbalanced displacement, and improve the magnetic suspension control precision of bearingless induction motor, a compensation controller of unbalanced excitation force is designed. In the end, relevant simulation verification and analyses have been made.
From the simulation results, there are following conclusions:
Based on the proposed unbalanced displacement extraction algorithm, either in the dynamic process or in the steady state, a better tracking and extraction performance of unbalanced displacement can be achieved. Based on the proposed unbalanced displacement extraction algorithm, when the unbalanced centrifugal exciting force is compensated, the unbalance vibration of bearingless rotor can be effectively suppressed, and the suspension control precision of bearingless induction motor can be greatly improve. The proposed unbalanced displacement extraction algorithm is effective and feasible, and an effective way has been provided for the unbalanced displacement extraction and unbalanced vibration control of bearingless induction motor.
When the presented extraction algorithm is adopted, during the transient process of system starting, there is still a certain dynamic tracking error. Then on the basis of keeping higher dynamic tracking speed, how to further improve the dynamic tracking accuracy of unbalanced displacement is an important issue to be further studied. In addition, during the starting process, although the unbalanced vibration of rotor is effectively suppressed, it still cannot be eliminated completely. The reasons include following aspects: the unmodeled dynamics of bearingless induction motor system, the time lag of unbalanced vibration compensation force, and the adopted decoupling strategy to be improved, etc. Now, under the conditions of considering the unmodeled dynamics and the time lag of nonlinear time-varying system, there have been many research progresses in the intelligent control theory [6, 19, 30, 32]. And then, aiming at the bearingless induction motor system, and based on the fuzzy control, neural network, and other modern control theory, how to develop a more advanced unbalanced vibration decoupling control strategy is another issue to be further studied.
Footnotes
Acknowledgments
The supports of Natural Science Foundation of China (51277053), International Cooperation Project on Sci. and Tech. of Henan Province (114300510029), are acknowledged.