
Abstract
In the transport system of a thin steel plate production line, the quality of the plate surface deteriorates over time because of contact with rollers. As a solution to this problem, the noncontact transportation of steel plates using an electromagnetic force has been proposed. To improve the levitation performance of the conventional magnetic levitation system, we have proposed the use of an electromagnet to control the horizontal displacement of the steel plate. By using a horizontal electromagnet a vertical force to support the steel plate and a horizontal force to suppress elastic vibration act on the steel plate. Focusing on these forces, we have proposed a magnetic levitation system for a steel plate with simultaneous horizontal positioning control and vertical non-contact support using a horizontal electromagnet. In this study, we measured the vertical suspension force including levitation from experimental results. We investigated the levitation performance of a steel sheet by performing a levitating experiment using a newly manufactured magnetic levitation system.
Introduction
Thin steel plates are widely used as materials in automobiles, electric appliances, buildings, and other products. A production line of steel plate includes a transport system utilizing the friction force induced by contact. In a contact based transport system for steel plates using the friction force the deteriorates of surface quality is a problem. As a solution to this problem, non-contact conveyance systems using electromagnetic levitation technology have been performed and active research has been conducted [1–7]. In our study of electromagnetic levitation technology, we focused on thin steel plates used in various industrial products. However, when the steel plate is thin, the flexural rigidity of the thin steel plate is low. The deflection is generated where the attractive force does not appliy, making stable levitation difficult. As a solution to this problem, our research group has achieved the stable levitation of a thin steel plate by the application of tension by electromagnets installed in the horizontal direction [8,9], where the horizontal electromagnets generate not only horizontal tension but also a vertical suspension force for levitation.
Electromagnetic levitation system for steel plate using only electromagnets installed in horizontal direction.
Focusing on these forces, the feasibility of a magnetic levitation system for steel plates using electromagnets installed in the only horizontal direction was considered. Electromagnetic field analysis by the finite element method (FEM) was performed, and we confirmed that the proposed system can levitate a steel plate with a thickness of 0.24 mm. These results have been verified experimentally [10]. Furthermore, we carried out a shape analysis of a levitated steel plate by the finite difference method (FDM) to obtain the optimal position of the electromagnets to suppress the deflection of the steel plate by considering the attractive force of the electromagnets [11]. In this study, we constructed an edge supported levitation system and carried out a levitation experiment. From the result, we discuss the levitating performance of the proposed electromagnetic levitation system.
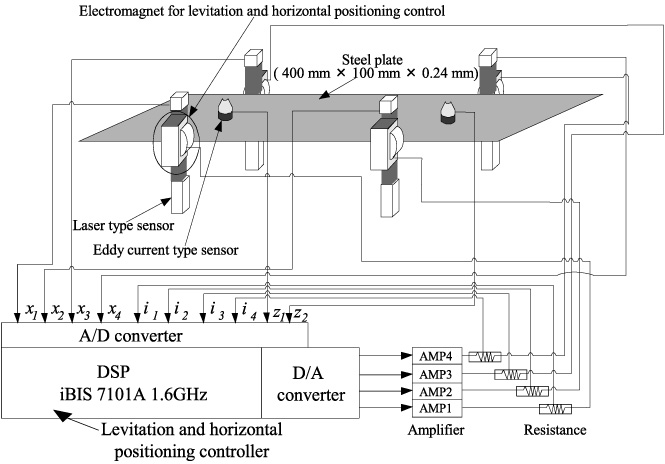
Figure 1 shows the newly constructed edge supported electromagnetic levitation system and Fig. 2 shows a schematic illustration of the proposed electromagnetic levitation system. Furthermore, Fig. 3 shows a photograph of the electromagnetic levitation system during the levitation of a steel plate. The levitated object is a rectangular galvanized steel plate (material SS400) whose length is 400 mm, width is 100 mm, and thickness is 0.24 mm. In the electromagnetic levitation system, as shown in Fig. 4, two electromagnets facing each other are installed in the longitudinal direction near the edge of the thin steel plate. The attractive force of the electromagnets installed in the horizontal direction near the edge of the steel plate performs non-contact positioning control. The electromagnets are installed at positions to minimize the deflection of the steel plate. The positions are obtained by deflection shape analysis by FEM and FDM, and the steel plate is expected to stably levitate when electromagnets are installed at these positions. Four laser sensors (which measure the displacement by the cutoff amount of a belt-like laser beam) are used to measure the horizontal displacement of the edge of the steel plate. Thereby, the steel plate is controlled by non-contact positioning by the electromagnets at a distance of 5 mm from the edge of the steel plate. Furthermore, the control law is calculated by detecting the current flowing in each electromagnet from the measured external resistance and inputting a total of eight measurement values into a digital signal processor from an A/D converter. One of the electromagnets installed in this system is schematically shown in Fig. 5 (a), and a photograph of an electromagnet is shown in Fig. 5 (b). The E-type core material is ferrite with an enamel wire of 0.5 mm diameter wound around it 1005 times. To measure the displacement of the steel plate to evaluate its levitation state, eddy current type non-contact displacement sensors are installed as shown in Fig. 4.
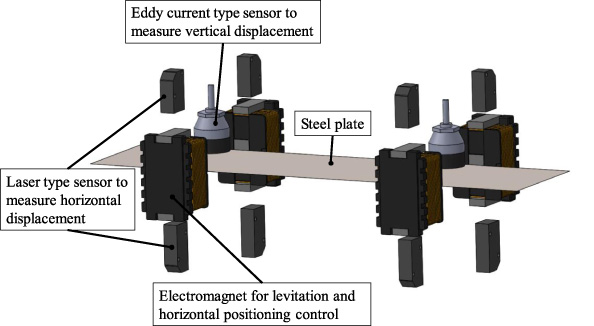
Schematic illustration of proposed electromagnetic levitation system.
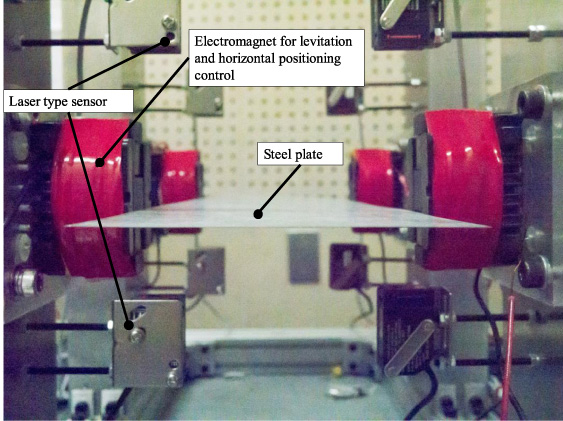
Photograph of electromagnetic levitation system.

Placement of electromagnets and sensor.

Electromagnet installed in proposed levitation system.
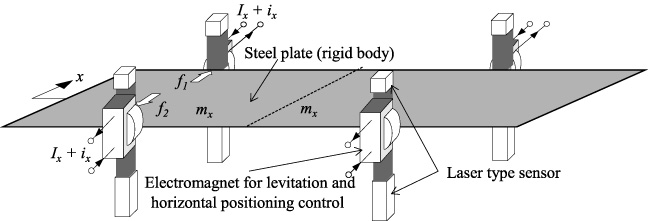
Experimental model of electromagnetic suspension force.
Although the flexible thin steel plate exhibits elastic vibration in the vertical direction, it can be regarded as a rigid body in the horizontal direction. The proposed system virtually divides the steel plate into two parts as shown in Fig. 6. We model the motion of the steel plate in the horizontal direction using a 1-DOF model that actively controls each part. The same static attractive force is applied by the two electromagnets installed to sandwich the steel plate, and the equilibrium position of the steel plate is at the same distance from each electromagnet. The displacement of the steel plate from the equilibrium position is defined as x, and the motion equations and circuit equations are given by Eqs. (1)–(4). Also, the attractive force of the electromagnets at the equilibrium point was linearized.
Coefficient of control model
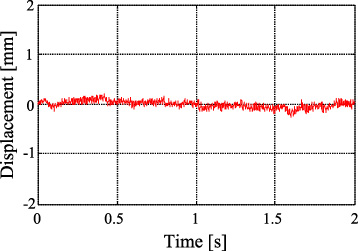
Time history of displacement of the steel plate in horizontal direction.
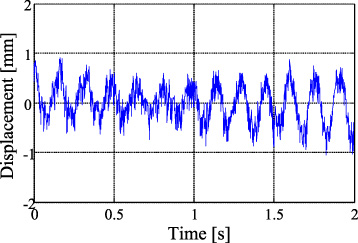
Time history of displacement of the steel plate in vertical direction.
We carried out a levitation experiment to verify the effectiveness of a newly constructed electromagnetic levitation system. The parameter that was used to design the control system is shown Table 1. When the steady current was 1.0 A, we could levitate a steel plate in the non-contact mode. We measured the vertical and horizontal displacements when the steel plate was levitating and the standard deviation of the displacement was calculated in both directions. Figure 7 shows the time history of the displacement of the steel plate in the horizontal direction. Figure 8 shows the time history of the displacement of the steel plate in the vertical direction. The standard deviation in the horizontal direction was 0.0721 mm, we had confirmed that thin steel plate is stably levitated when the standard deviation of displacement is less than 0.1 mm [9]. We confirmed from the standard deviation of the displacement and the time history of the displacement in the horizontal direction that the position of the steel plate in the horizontal direction can be controlled. Standard deviation of displacement in vertical direction, in Fig. 8, was 0.301 mm. It was confirmed that sustained levitation can be achieved from the time history of the displacement in the vertical direction.
Conclusion
In this study, we carried out a levitation experiment using a steel plate of 0.24 mm thickness to verify the effectiveness of a newly constructed electromagnetic levitation system. According to the result, we were able to levitate a steel plate using only a magnetic field in the horizontal direction and the effectiveness of magnetic levitation system using only a magnetic field in the horizontal direction was shown.