
Abstract
In this paper, the dynamic magnetostriction of the electrical steel sheet is measured by a triaxial strain gauge based on a single-sheet tester under the alternating magnetic flux condition. The anisotropic magnetostriction property is analyzed, and an improved back propagation neural network assisted model is applied to model the anisotropic principal strain of magnetostriction along different excitation directions. To keep the evaluation cost at an acceptable level, the Levenberg-Marquardt algorithm combined with particle swarm optimization is developed. Finally, the proposed model is verified by comparing the measured magnetostriction and computed one.
Introduction
The magnetostriction of the electrical steel sheet causes the vibration and undesirable noise in transformers and motors, which reduces the service life of the electrical devices and affects the human health. Therefore, it is essential to evaluate the magnetostriction in the electrical steel sheet [1, 2, 3, 4, 5]. For the dynamic magnetostriction in the electrical steel under purely sinusoidal induction, the back propagation neural network (BPNN) is widely used to predict the magnetostriction loops with different magnetic inductions along the rolling direction (RD) [6, 7]. However, when studying the anisotropic principal strain of magnetostriction along various excitation directions different from the RD, the BPNN based on the gradient descent (GD) algorithm is hard to reach the acceptable convergence condition due to the increase of the numbers of weights and thresholds of the neural network.
In this paper, with the help of the dynamic magnetostriction measurement device, the dynamic magnetostriction is measured by a triaxial strain gauge under some alternating inductions with different magnitudes and directions, and the anisotropic magnetostriction property is analyzed. A BPNN model assisted with the Levenberg-Marquardt (LM) algorithm and particle swarm optimization (PSO) algorithm is proposed to model the anisotropic magnetostriction property of the electrical steel under alternating magnetization. The validation and fast convergence ability of the model are verified.
Measurement of magnetostrictive property
The measurement device of magnetostriction is shown in Fig. 1. The exciting device adopts the single yoke structure, and a long strip of electrical steel sheet with 600 mm in length and 100 mm in width is chosen as specimen. The exciting voltage in the winding is controlled in a closed-loop way so that the sinusoidal magnetic flux density waveform at 50 Hz is generated in the sample. To investigate the anisotropic magnetostriction of the electrical steel sheet under different magnetizing directions, the specimen is cut with 15
Measurement device of magnetostriction. (a) Exciting device. (b) Triaxial strain gauge. (c) Configuration of exciting device.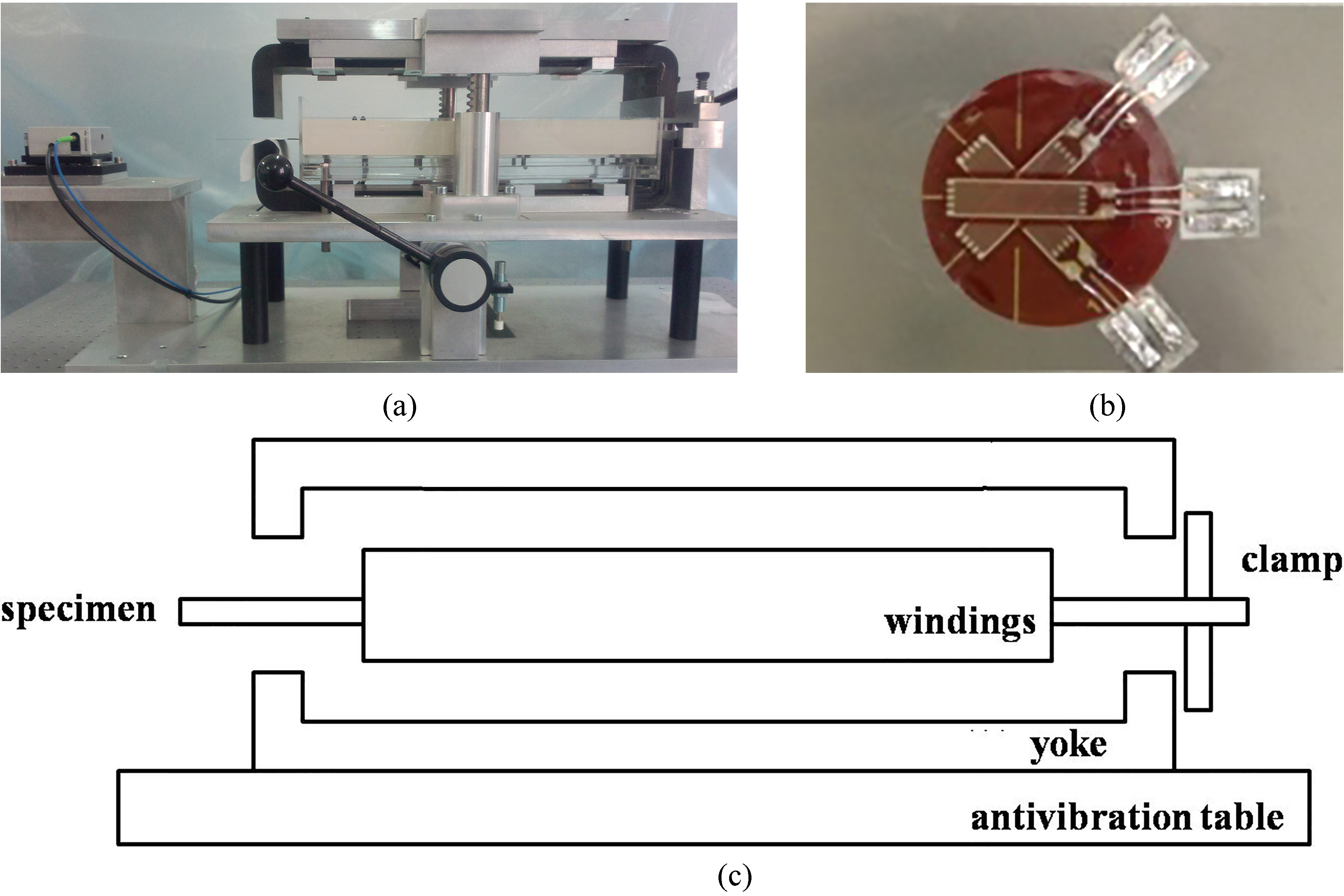
Magnetostrictive loops at three different detection directions when 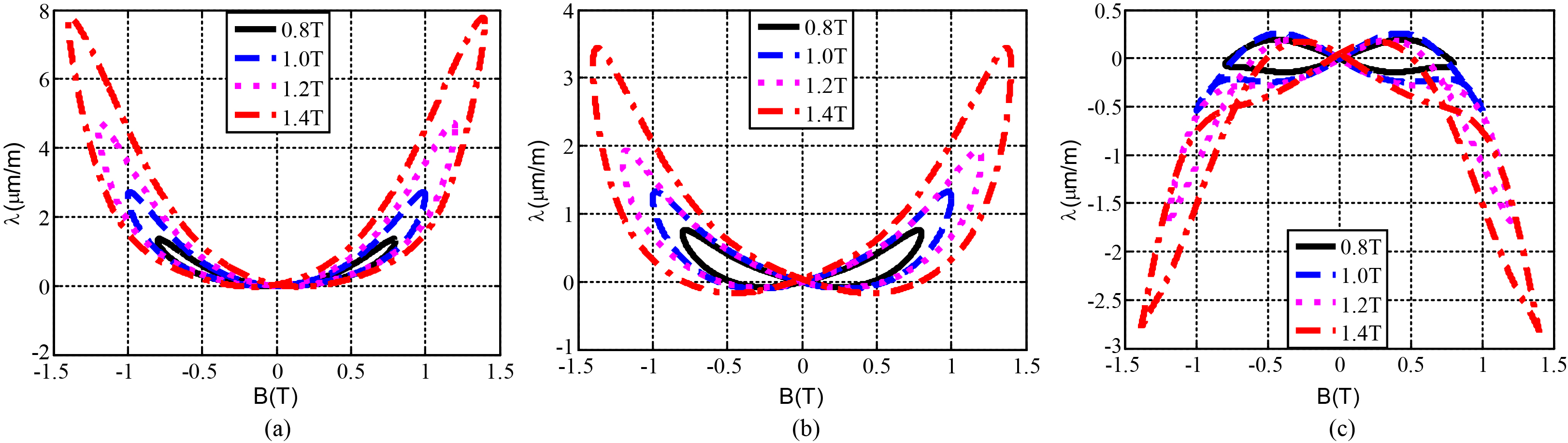
Figures 2–4 show the measured magnetostrictive loops of three detection directions of the triaxial strain gauge when the magnetization direction
Magnetostrictive loops at three different detection directions when 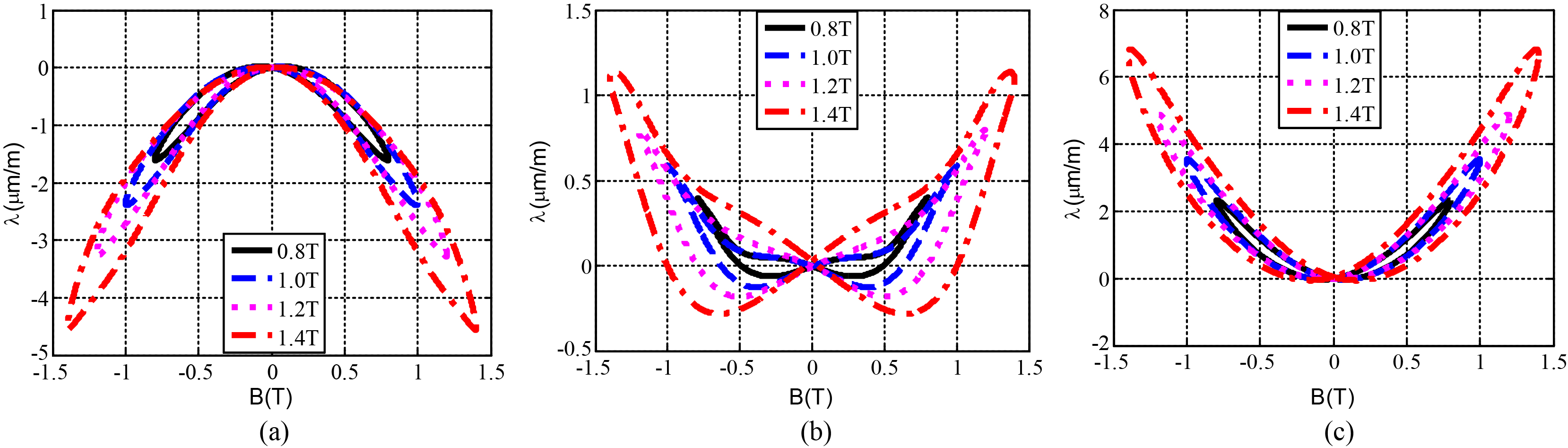
Magnetostrictive loops at three different detection directions when 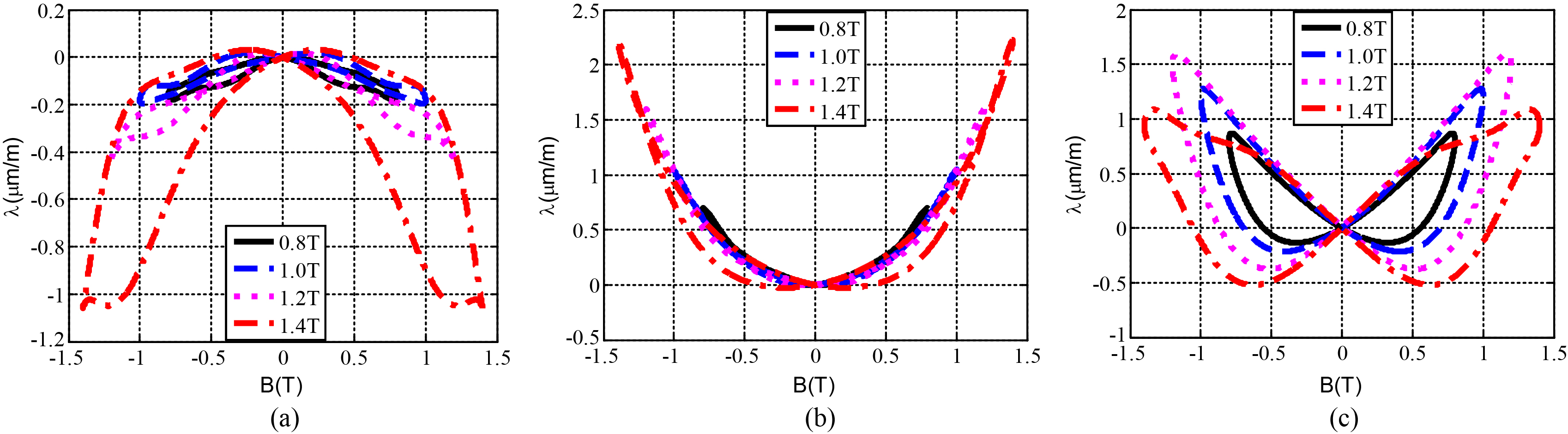
Figure 5 shows the general training scheme of the BPNN. The training sets are chosen from measured magnetic flux density
General training scheme of the BPNN.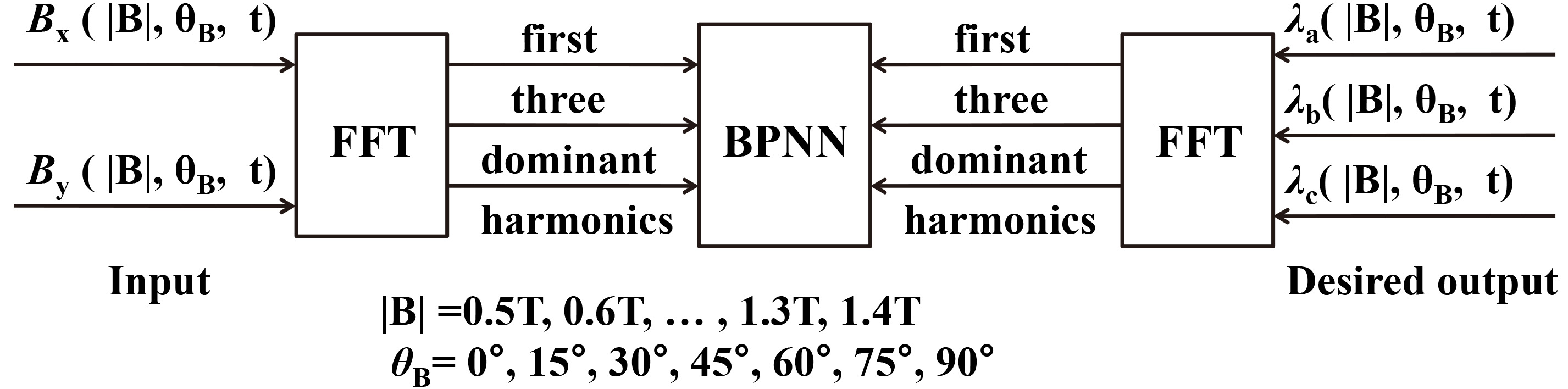
The key technique of establishing the BPNN model is to determine the number of hidden layers, the number of neurons in each layer, the type of transfer function and suitable training algorithm. Through various trainings from the GD, an optimal configuration of the BPNN is obtained, which includes 12 neurons in the input layer, 20 neurons in the hidden layer with a sigmoid transfer function, and 18 neurons in the output layer with a linear transfer function. The numbers of the weights and thresholds of the BPNN are 638.
In order to satisfy the training requirements of the BPNN with hundreds of weight thresholds, the conventional BPNN based on GD is improved by the LM algorithm combined with PSO. The LM algorithm uses the approximate second derivative of the information, and it has much faster convergence speed than the GD method. The general description of the LM algorithm is given as follows:
where
where
Flowchart of the BP-LM algorithm.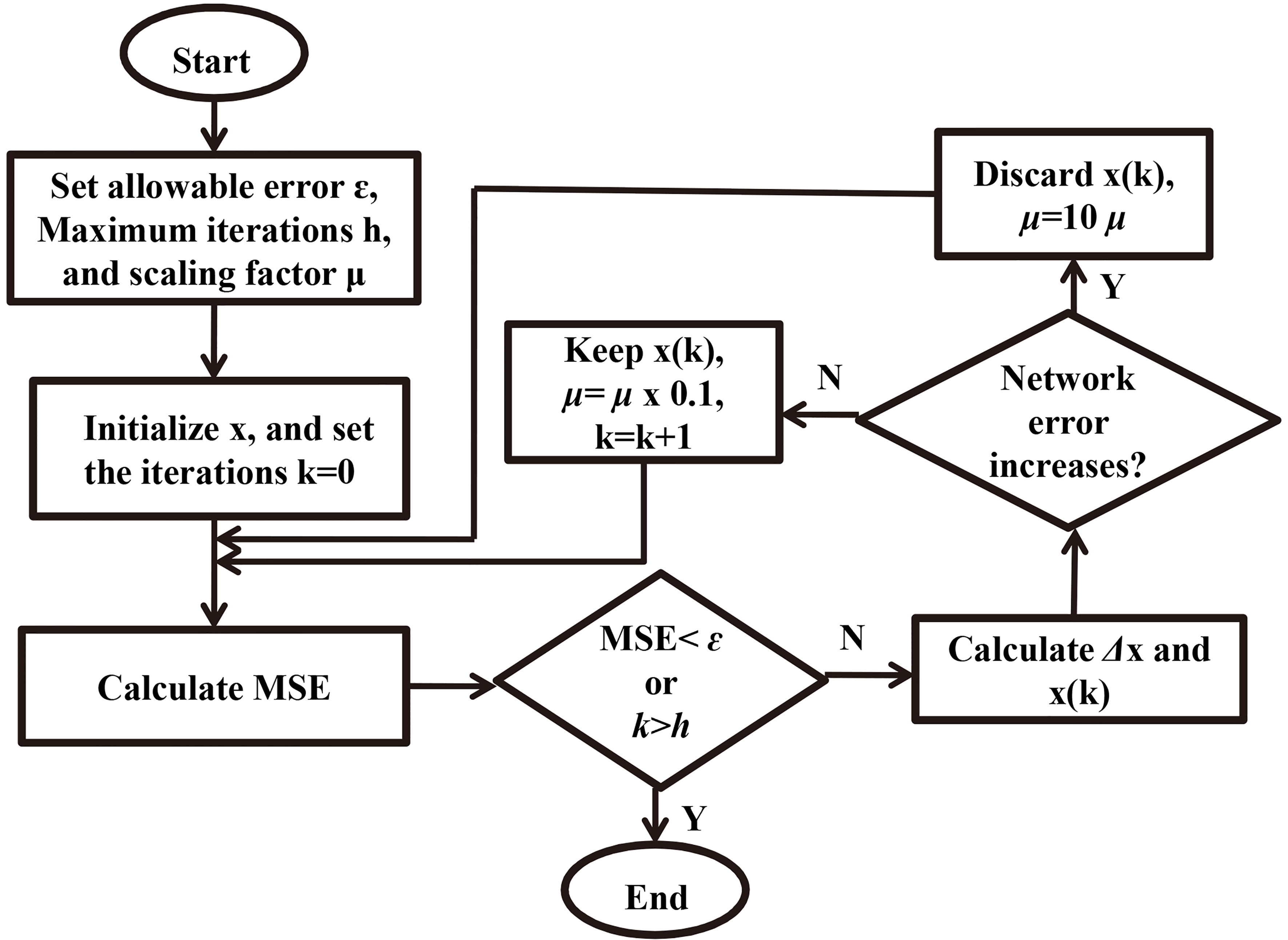
Figure 6 shows the flowchart of an improved BP algorithm modified by LM algorithm. The convergence speed is greatly improved by adjusting the factor
Flowchart of the optimization for initial weight and threshold.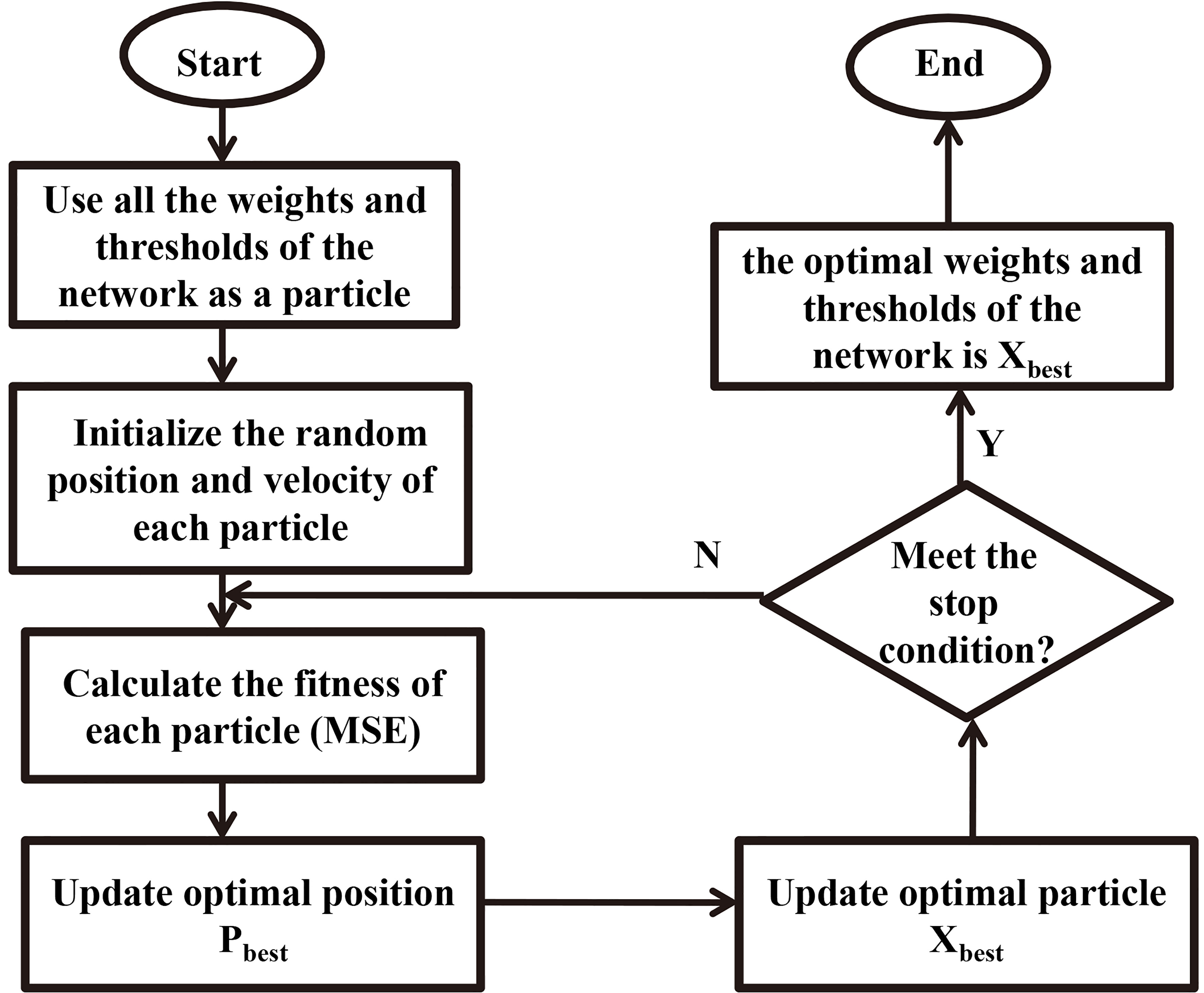
Figure 7 shows the flowchart of the PSO for optimizing the initial weights and thresholds of the network. Before using the BP-LM algorithm to train the network, all the weights and thresholds of the network are used as a particle which are used to represent the individuals in the population, and the dimension
where
Compared convergence of the BPNN during the training period.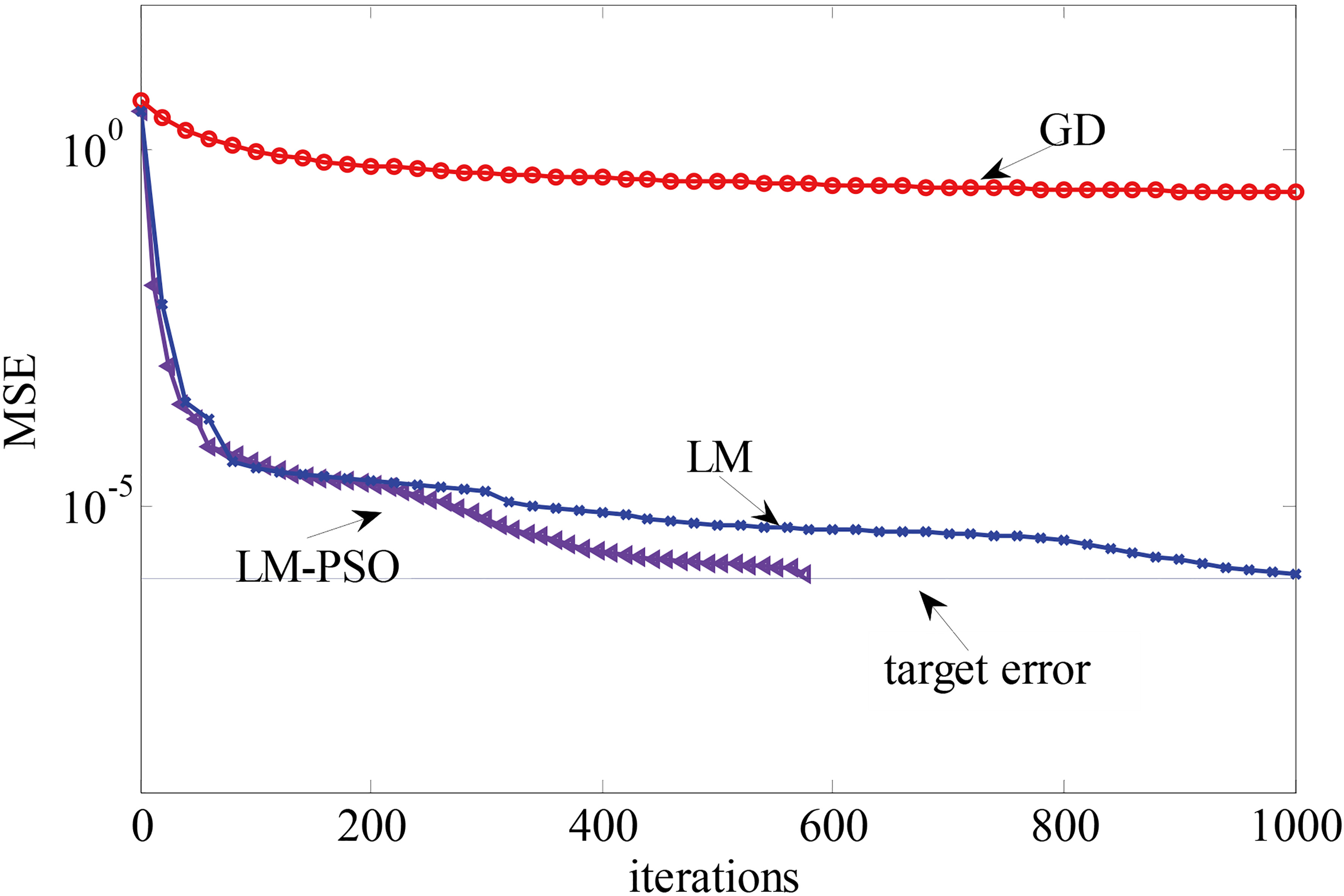
Calculated and measured 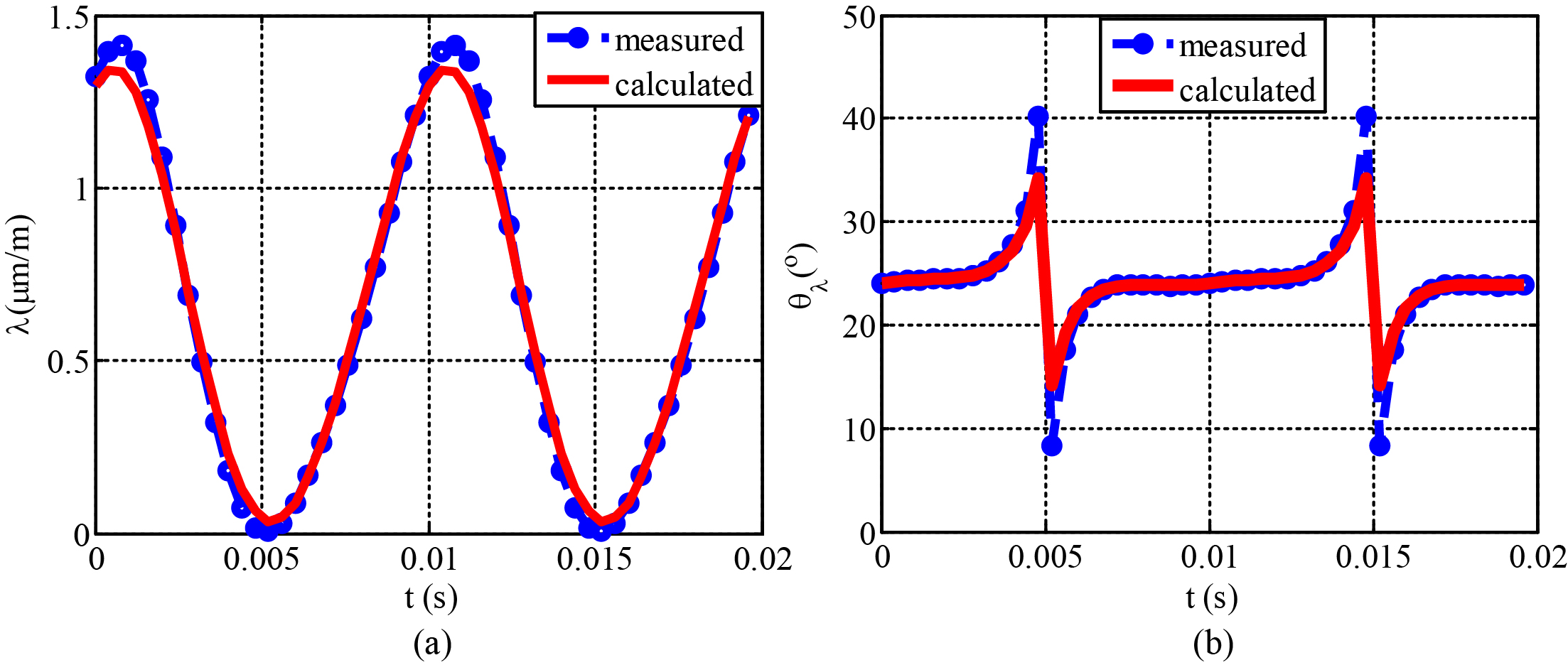
Figure 8 compares the convergence during the training period of the conventional, LM trained and LM-PSO trained BPNN. It can be seen that the conventional GD trained BPNN is running into local minimum with the MSE of nearly 0.073 after 1000 times of iteration when the training algorithm of the BPNN is based on GD. The main reason is due to the increase of the numbers of the weights and thresholds. However, the BPNN based on the LM-PSO is able to meet the convergence conditions and greatly speed up the convergence compared with LM trained BPNN.
Calculated and measured 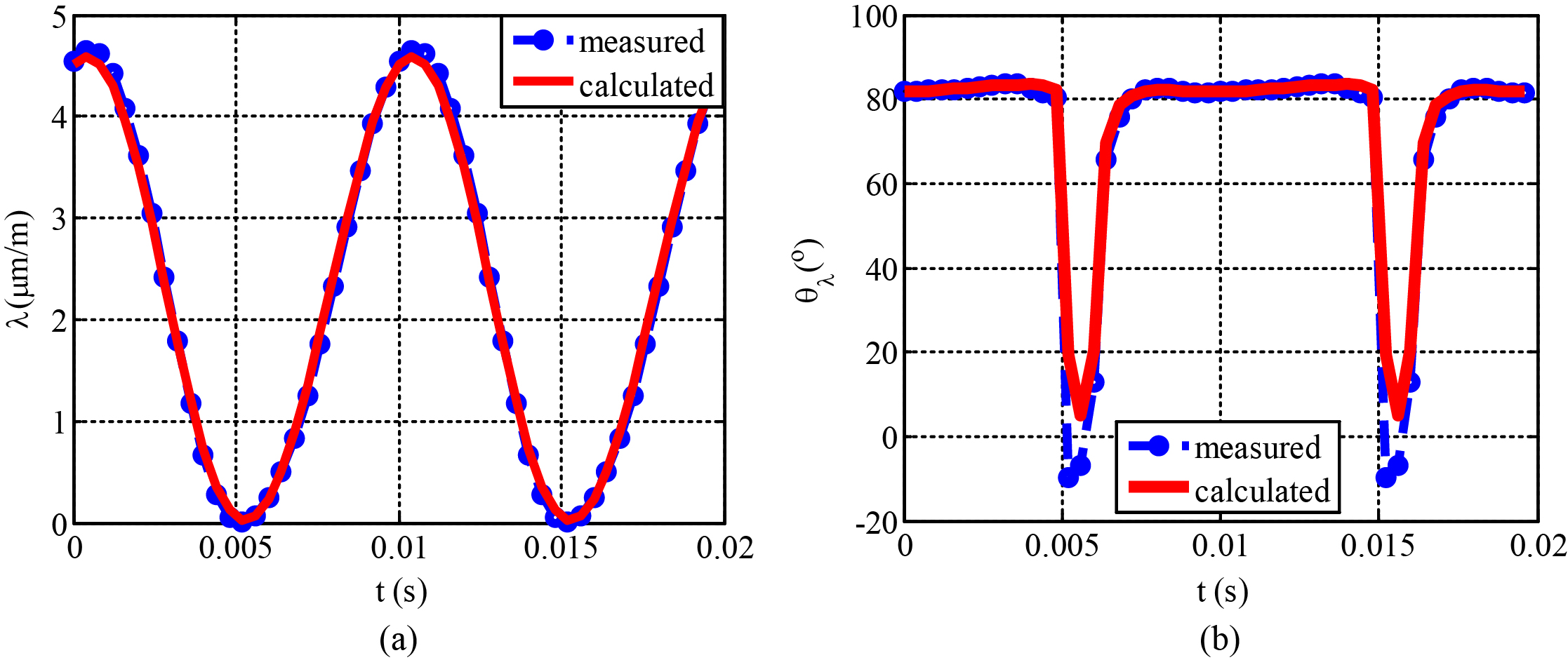
Experimental model of single phase transformer core.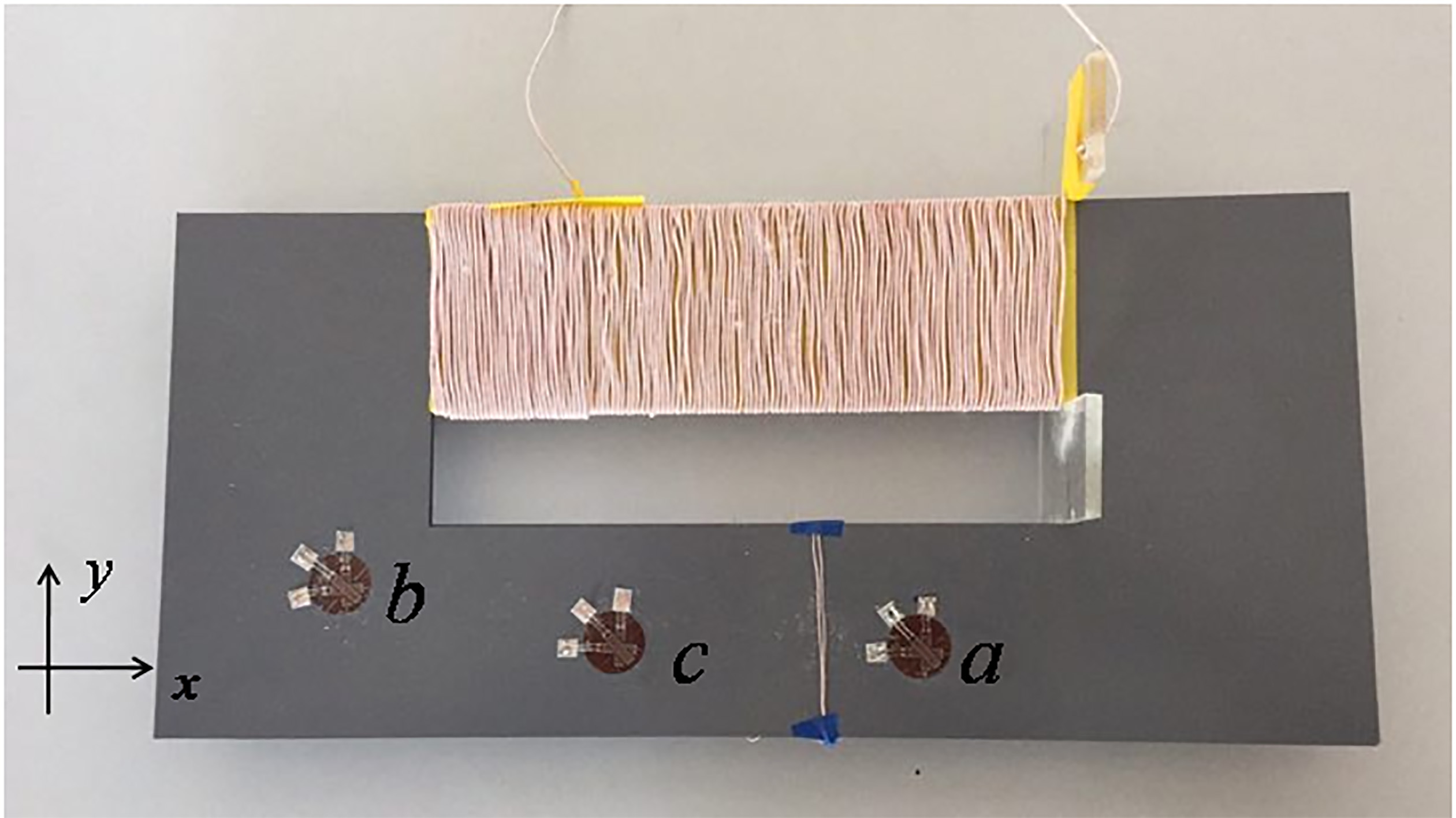
In addition, based on the knowledge of plane strain in material mechanics, the principal strain
To check the effectiveness of the proposed method to model the anisotropic magnetostriction property, a single phase transformer core model is made as shown in Fig. 11, which is laminated by 10 pieces of oriented electrical steel sheet (30ZH105), and the number of turns in the winding is 160. Three triaxial strain gauges are stuck on the surface of the core to measure the magnetostriction waveform at three different points marked with point ‘
Measured and calculated values for measuring position ‘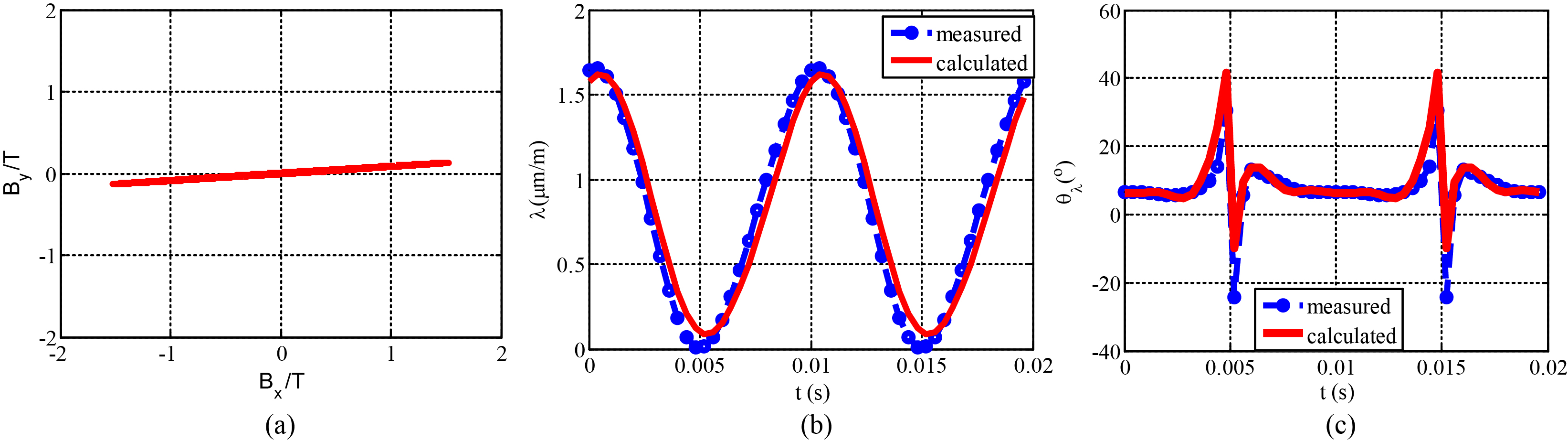
Measured and calculated values for measuring position ‘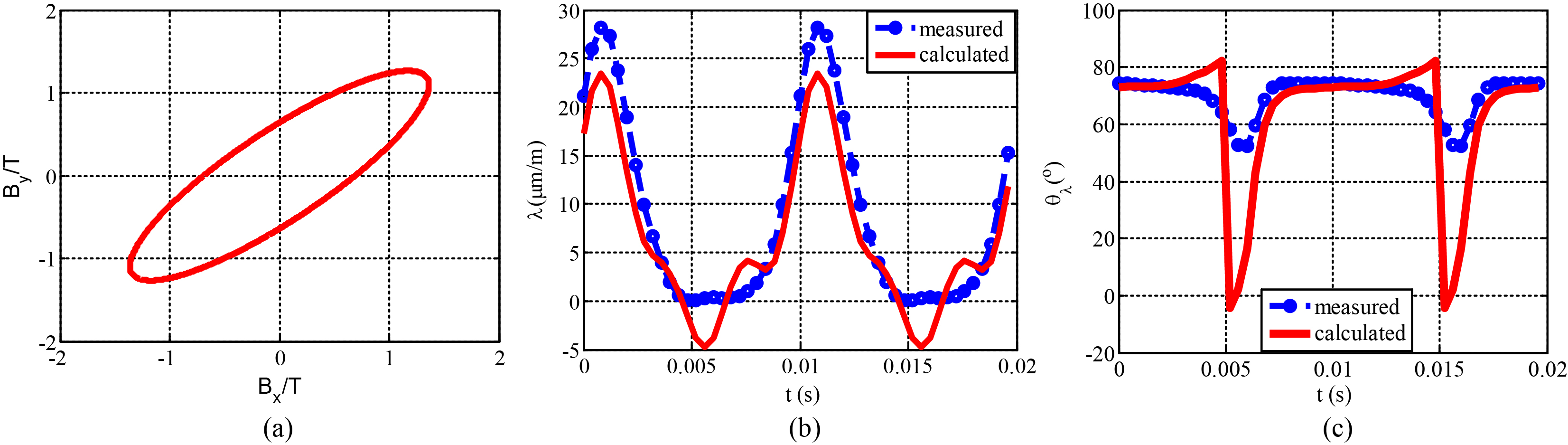
Measured and calculated values for measuring position ‘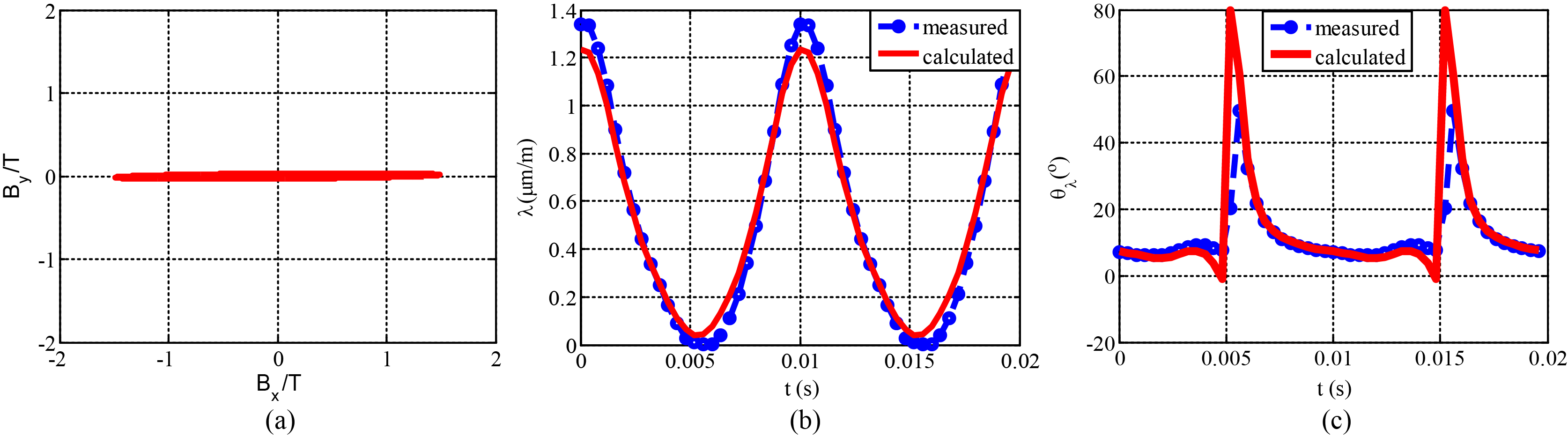
Figures 12–14 show the measured flux density locus and the principal strain at three different test points, respectively, in which the flux density locus are measured by a
If utilizing the proposed BPNN to model the rotational magnetostriction, it will be difficult since the rotating magnetic field covers different magnetization values, inclination angles and axial ratios, which needs a large amount of training sets and results in the low computation efficiency. In order to ensure the calculation speed and the accuracy of the model, it is necessary to further improve the neural network or use another model to replace it, which is our further research work.
The magnetostrictive property in the electrical steel sheet is measured under the alternating magnetizations, and the experimental results illustrate the magnetostriction property has highly strong anisotropy along different magnetization directions. An improved BPNN assisted model is proposed to model the anisotropic magnetostriction, in which a BPNN combining the LM algorithm and PSO is applied to keep the evaluation cost at an acceptable level. The validation of proposed model is verified by comparing modeled and experimentally measured magnetostriction of a single phase transformer core, and it is also referred that the proposed model has good modelling accuracy for alternating magnetization and is not suitable for rotational one.
Footnotes
Acknowledgments
This work was supported by National Natural Science Foundation of China under Grant 51777128.