
Abstract
Magnetorheological (MR) damper is a smart device which the damping force can be adjusted according to the working operations in a short time. Metal foam MR damper is a new type of MR dampers in which uses the metal foam to store and release the MR fluids. The dynamic response time of the metal foam MR damper is quite different due to the added metal foam especially for the dynamic response time model. This paper proposed a dynamic response time model for the metal foam MR damper based on the demonstration of the working mechanisms and the factors about the response behaviors.
Introduction
Magnetorheological (MR) damper is a kind of smart devices which the damping force can be adjusted according to the environment due to the behavior of MR effect. The MR effect is generated from the MR fluids. MR fluids are a type of smart fluids which the micrometer-scale magnetic particles suspense into the oil and additives. The apparent viscosity of the MR fluid greatly increases and becomes a viscoelastic solid when applied a magnetic field that exceeds a critical value. The yield stress of the MR fluid can be controlled accurately by adjustment of the magnetic. The magnetic particles become chain-like structure along the direction of the applied magnetic field which behaves as non-Newtonian fluid. The larger the magnetic field, the more the chains. However, when the applied current is removed, the particles dispersed in the MR fluids as Newtonian fluid. This behavior is called MR effect. The MR effect is that reversible transform from Newtonian fluid to non-Newtonian fluid by applying the magnetic field in a few milliseconds [1–5].
By using MR effect characteristic, MR fluids have been widely used in seat suspensions [6–10], civil engineering [11–15], vibration dampers [6,16–20], haptic device [21] et al. MR dampers are one of the most popular devices for researchers and engineers by using of MR effect behavior especially for the fast response time and controllable. MR damper is full with the MR fluids in the working cylinder. The damping force can be continuously controlled by varying magnetic fields generated from adjustment of applied currents.
The adaptive controllable damping force and the fast response time are two main characteristics for widely applications of the MR damper. Dynamic response time is a critical parameter to evaluate the performance of the MR damper. The dynamic response is usually defined as the time starting from initial damping force until to reach 63.2% or 90% of the steady damping force [22]. The behavior of real-time controllable damping force in the application is largely dependent on the performance of response time. The fast the response time, the better the controllability [23,24]. The response time of MR damper is determined by various factors such as characteristics of MR fluids (viscosity, diameters of magnetic particles et al.), structure of MR damper (materials, shear gap, electromagnetic coils et al.) and mechanical system response time.
Recently, some researchers focused on the response time of MR fluids. Chen [25] studied the response performance of shear stress for magnetic powder by applying stepwise magnetic fields. They found that the rising time of the shear stress is less than 0.1 s and affected by shear rates but independent on the magnetic field strength. However, the falling time is irrelevant with either magnetic fields or shear rates. Kikuchi et al. [21] proposed a fist-order lag model to investigate the response time of haptic device based on different types of MR fluids even with the similar volume fractions of iron particles. Sahin et al. [26] studied the response time of MR fluids and MR valves. They found that the magnetic response time took almost 77% on whole pressure response time. They also proposed a response time model in term of overall pressure of MR valve system by using the Maxwell model. By using Ansys Electromagnetics, Michal et al. [27] studied response behavior of magnetic field of MR damper by developing the transient magnetic. They found that the response time decreased with decreasing the mass concentration of magnetic particles.
Structural parameters such as shear gaps and geometries are another critical factors to the response time of MR damper. Kikuchi et al. [21] reported that the response time behaviors of haptic devices are different with shear gaps and MR fluids. Sahin et al. [26] found that the response time of magnetic field is largely depend on the fluid flow and the geometry of valves. The response time radial MR valve is faster than that of the annular MR valve. The response time of MR valve with multiple coils is slower than that of MR valve with only one coil due to the interaction of magnetic flux density. Yoon et al. [23] reported that the eddy current result in delay time due to core materials is of significance to effect the vibration control of MR damper. The response time of MR damper can be improved to reduce the resistance of the embedded coil [28].
The response time of MR damper can be effected by the response of mechanical system of the experiments. Sahin et al. [26] defined mechanical response as the time span from the power on to the beginning of electric current flowing in the system. This delay time of 4 ms can be omitted compared with the system rising time of 110 ms. Yao et al. [33] also obtained a similar result. Moreover, Cha et al. [24] studied the performance degradation was different with the time delay by using different semi-active control approaches.
The metal foam MR damper [3,29,30,33] is a new type of MR devices to reduce the cost based on the idea of the absorbent-matrix MR devices [31,32]. Compared with the sponge-based MR damper, the metal foam MR damper has the advantages of longer life span and low-cost without sealing. The porous metal foam is stick onto the inner working cylinder of the MR damper to storage and release the MR fluids.
Compared with the traditional MR dampers, the response time of MR dampers based on sponge or metal foam is quite different due to the added materials. In our previous studies, we have experimentally investigated the response time and delay time of the MR damper (Yan et al. [33]; Xingyan Yao et al. [29]). The response time of the metal foam MR damper is longer than that of the traditional MR damper since the external time that MR fluids are drawn out from the metal foam into the shear gap. The mechanisms of response time is complex, and the development of the response time model is a challenge for the metal foam MR damper.
Until now, lots of researches have studied the response time of MR damper in terms of experiments and simulations. Fewer studies focus on developing the response time model due to the complex mechanisms. In this paper, a dynamic response time model of the metal foam MR damper is proposed based on the analysis the working mechanism and the factors. The paper is organized as follows. Section 2 presents the working mechanism of the metal foam MR damper and the factors about the response time. Section 3 demonstrates dynamic response time based on the bundle model of the metal foam. The conclusions are presented in Section 4.
Metal foam MR damper
In this section, the working mechanism of the metal foam MR damper is described, and then the factors affecting the response time are discussed.
Working mechanism
The working mechanism of the metal foam MR damper is shown in Fig. 1 [33]. A piece of metal foam is stick to the inner working cylinder to store and release the MR fluids under the effect of the applied current. The MR fluids are stored in the metal foam when the current is zero. However, when the current is on and over a critical value, the magnetic force overweight the gravity, surface tension and the intermolecular interaction. The MR fluids in the metal foam will be drawn out to fill with the shear gap. Subsequently, the MR effect is generated by the extractive MR fluids moving with the piston. The shear force depends on the volume of the extractive MR fluids in the shear gap. The more the extractive volume of the MR fluids, the larger the shear damping force until the magnetic is saturation.
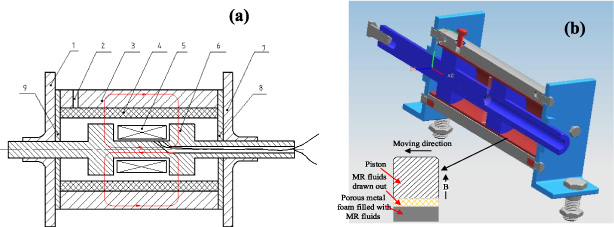
Metal foam MR damper: (a) Schematic of the damper; 1, 7 end cover; 2 shear gap; 3 steel cylinder; 4 metal foam; 5 coil; 6 piston; 8, 9 sheet copper; (b) 3D image.

Test principle of dynamic response time: (a) Response time of MR damper and sensor; (b) Response time of sensor.
The response time of MR fluids and the porous foam metal MR damper are both in the order of milliseconds. The test system of the dynamic response time is the same as in [33], two channels were used in the experiment. One channel is to obtain the time the coil is on, which includes the response time of the DAQ module and running of computer software. The other channel is used to detect when the damping force is generated, which includes the response time of the force sensor, the DQA module, and running of computer software. Considering that the response time of different channels may cause errors, the two channels were tested separately before the experiment. The results show that the signals detected by the two channels were less than 1 ms when the voltage signal is simultaneously supplied [29]. Therefore, the influence of the response time of the two different channels on the porous foam metal MR damper can be ignored. Figure 2 gives the principle of the whole test system. t1, t2, t3 and t4 are the response time of MR damper, sensor, DAQ and running of computer software. According to Fig. 4(a), the difference of response time between channel 1 and channel 2 is the sum of the response time of the MR damper and the sensor, t 1 = (t 1 + t 2 + t 3 + t 4) − (t 2 + t 3 + t 4).
There are three stages regarding to the dynamic response time for the metal foam MR damper according to the working mechanism. The first stage is the time span that MR fluids are drawn out from the metal foam into the shear gap, which is mainly determined by the behaviors of MR fluids, structure of the metal foam and the magnetic field strength. The second stage is the time span that the extracted MR fluids rising to the height to contact with the piston. The MR fluid characteristic and the applied magnetic field are key factors during this time. The third stage is the period that the MR effect produced by the magnetic field and the moving piston, which is influenced by the MR fluid characteristic and the applied magnetic field.
Therefore, the total response time of the metal foam MR damper are as following. The response time to produce MR effect; The response time that the MR fluids are drawn out from the metal foam to the shear gap where contact with the surface of the piston; The response time that MR fluids rises from the surface of the metal foam to reach to the piston; The response time of the computer hardware, data logger and the flexibility of the test system; The response time that the porous metal foam reaches saturation. The main factors to effect the dynamic response time of the metal foam are as following.
Characteristics of the MR fluids is a key factor to effect the response time. According to the dynamic analysis, the larger the viscosity of the mother liquors, the larger the resistance of the magnetic particle to move, and the response time becomes longer. Furthermore, the bigger the volume fraction of the magnetic particles, the easier to form the chain-like structure, and the response time becomes shorter. Moreover, the greater the applied current, the bigger the stronger the interaction force between the magnetic particles, the greater the kinetic energy of the particles to move, and the shorter the response time.
The structure of the metal foam is another critical factor influencing on the response time. The magnetic field strength inside the metal foam is different with magnetic permeability of various the metal foam. The higher the magnetic permeability, the larger the magnetic field strength, the easier the magnetic particles reach saturation to move, and the faster the response time. However, the smaller the magnetic permeability, the smaller the internal magnetic field strength and the longer the response time.
The remaining magnetic field after removing the external current is another factor. Some of the MR fluids remains in the shear gap due to the remanece effect, which a certain influence on the time has required for the damping force to be a steady state. Effect. Moreover, the response time of the flexibility of test system, the software, hardware and the data logger also affect the response time.
Dynamic response time model
In this section, a capillary tube model of the metal foam is demonstrated for the response model, then the response time model based on the dynamic analysis is proposed. Finally, a case study is present to analysis the computing error.
Capillary tube model of metal foam
According to the statement in the introduction, the MR effect is produced by the chain-like formation of the magnetic particles in the MR fluids. When the applied current is zero, the magnetic particles are dispersed in the metal foam. However, as soon as the current is on, the magnetic particles begin to move to be chains along the direction of the applied magnetic field. The larger the magnetic field strength, the more the chains. This chain-like formation is depicted in Fig. 3.
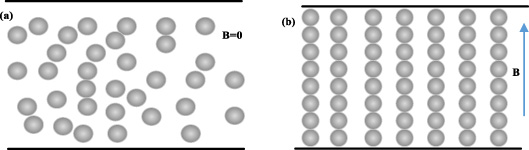
Working principle of MR fluids: B = 0; (b) B ≠ 0.
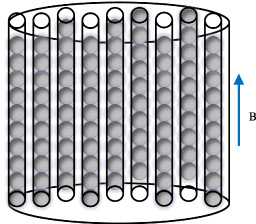
Capillary tube model of MR fluids.
Given the assumption that the pores in the metal foam is uniformly distributed, a model of porous materials based on single hole is proposed by Gibson and Ashby [34]. The porous medium was equivalent to multiple capillary tubes to study the fluid flow in porous medium [35], which ignores the complex cross-network structure inside the metal foam. It is simple, practical and proper for high-porosity metal foam.
In this paper, we focus on the force and flow of MR fluids along the direction of the magnetic field. The porosity of the metal foam is more than 85%. The forces of MR fluids flow in the other directions and tortuosity of the metal foam are ignored. We assume that the metal foam is isotropic, and the metal foam is equivalent to a circular hole with the same size. The pores is uniform distribution. Therefore, the metal foam is taken as equal diameter capillary tubes in the direction of magnetic fields as shown in Fig. 4.
The forces applied on the MR fluids during the process that MR fluids are drawn out from the metal foam into the shear gap as follows: Magnetic force F
m
= μ0 M𝛻H; Gravity of MR fluid G = mg = 𝜌Vg; Surface tension F = σK (h)S
p
; The force between van der Waals and other molecules. According to the dynamic analysis, the Kinematic equation (1) is obtained
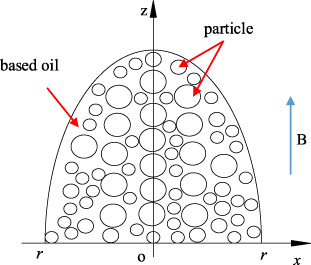
Rising model of MR fluid.
The dynamic characteristics of the MR fluid are not only related with the applied magnetic field, but also affected by the rising surface morphology of the MR fluid [34]. We assume the MR fluid extracted out of the hole of the metal foam is elliptical in the direction of the applied magnetic field, and the elliptical short semi-axis remains unchanged during the ascending process as shown in Fig. 5, therefore, the parameters in the equation (1) can be obtained
The equation (3) is written as
The physical meaning of the equation (6) is that the maximum rising length h max of the MR fluid achieved at t = t m , and the velocity of the MR fluid is zero at this point. That is mean t m and h max are obtained according to the maximum stable damping force.
According to the equations (3) and (4), we can see that C
1 and C
2 are constant if the applied field intensity is a constant value. If the magnetization of MR fluids is linear with the applied magnetic intensity, and H and B, H, M in the MR fluid are parallel to each other, B = μ0(H + M) = μ(H + M), μ = μ0μ
r
, then
The magnetization and magnetic permeability of MR are independent of temperature under isothermal conditions, hence,
Then the equation (3) is simplified as
The equation (6) shows that the length of the rising MR fluid mainly depends on the external magnetic induction. The relationship between the magnetic induction intensity and the applied current obtained by the experiments and the simulations can be brought into the above equation, and the height changing of the rising MR fluids with time can be obtained by using the mathematic solution and combining the formula (5). Taking metal foam copper as an example, the thickness and magnetic permeability of copper are 2 mm and 1 respectively. The curve of the rising height of the MR fluid as a function of time is shown in Fig. 6.
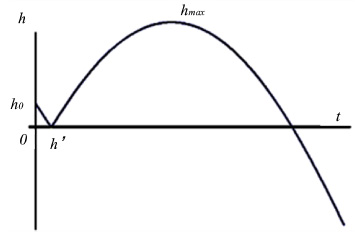
Relationship between the rising height of MR fluid and time.
Viewing from Fig. 5, the MR fluid rises to an initial height h 0 in the metal foam due to the surface tension and other forces when there is no external magnetic field. The magnetic force overcomes gravity and other forces when the current is applied, and the MR fluid begins to fall until the force reaches equilibrium. At this time, the height of the MR fluid returns to zero, which means the MR fluids return on the surface of the metal foam. When the magnetic field strength continues to increase, the volume of the MR fluids extracted from the foam metal to the shear gap, and the rising length of the MR fluid increases until the magnetic force balances with gravity of the MR fluids, surface tension and other forces. At this time, the MR fluid acceleration is zero, and the MR fluid rises to the maximum length. Since the rising force of the MR fluid is greater than the magnetic field force, the MR fluids finally returns to the holes of the metal foam, but the MR fluids may flow back to the foam metal due to the reflow of the MR fluids in the metal foam. Therefore, it appears a height in the negative direction.
Therefore, the rising height of the MR fluids extracted from the metal foam is not only related to the applied magnetic field strength, but also depends on the characteristics of the MR fluids and the structural of the metal foam. In summary, when the applied magnetic force is greater than the combined force of surface tension, viscous damping force and gravity, the MR fluid extruded from the metal foam; otherwise, the MR fluid will re-flow back into the metal foam.
In summary, the inevitable error in the experiment leads to a response time that is much larger than the calculated value. The factors that cause the error are as follows.
The flow of magnetorheological fluid is simplified during the calculation, and the ignoring the “junction” of the magnetorheological fluid in the porous metal foam material is ignored. The interaction with the metal in the foam metal material will increase the response time in the experiment.
The influence of the internal magnetic field gradient of the magnetorheological fluid is not considered in the calculation, and the influence of the magnetic field on the surface tension is also ignored. Both of the above factors will increase the actual response time of the magnetorheological fluid.
The analysis in the calculation shows that the response time of the magnetorheological fluid is mainly related to the magnetic field strength inside the magnetorheological fluid, and the data of the internal magnetic field is mainly obtained by simulation and calculation, which is one of root causes of the calculation errors.
Conclusion
This paper proposed a dynamic response time model of the metal foam MR damper based on the dynamic equations. The factors to affect the response are also discussed. The characteristics of the MR fluids and the magnetic field strength are the two main factors to determine the response behavior of the metal foam MR damper. The structure of the metal foam is another key factor to determine the response time for the metal foam MR damper.
Footnotes
Acknowledgements
This work is partially supported by the National Natural Science Foundation of China (51605061), Chongqing Research Program of Basic Research and Frontier Technology (cstc2017jcyjAX0183), Science and Technology Research Project of Chongqing Municipal Education Committee (KJQN201900808), Startup Project of Doctor Scientific Research (2016-56-04), School Projects of Chongqing Technology and Business University (1552003), and Open Grant of Chongqing Engineering Laboratory for Detection Control and Integrated System. The valuable comments and suggestions from the anonymous reviewer are very much appreciated.