
Abstract
Synchronous Reluctance Motors (SynRMs) have been widely used in some industrial fields because of their attractive characteristics, such as high efficiency, low cost, and simple structure. In order to reduce the torque ripple of the SynRMs, a non-parametric model is usually used to optimize the rotor structure. However, the conventional method has the problems of the low-accuracy and poor generalization ability. In this paper, an optimization method of the rotor structure is proposed to reduce the torque ripple by utilizing the deep learning algorithm. Firstly, the sample data of the relationship between the rotor structural parameters and torque ripple are obtained with the finite element analysis (FEA). The fast calculation model is established by the deep neural network (DNN). Then, with the goal of not weakening the torque density and minimizing the torque ripple, the immune clone algorithm (ICA) is utilized to optimize the structural parameters of the rotor at different operating points. Finally, the correctness and validity of the method are verified by the simulation analysis. It is concluded that the accuracy of the model established by DNN is acceptable. The proposed method can significantly reduce the torque ripple and increase the torque density.
Keywords
Introduction
Recently, because of the high cost and limited supply of rare-earth magnets, the Synchronous Reluctance Motor (SynRM) has received considerable attention in electric vehicle fields [1,2]. However, torque ripple is always a critical issue in SynRMs. The interaction between the spatial harmonics of electrical loading and the rotor anisotropy causes torque ripple that is intolerable in most of applications [3]. Optimization of SynRM design main focus on optimization of rotor design to reduce the torque ripple [4–12]. In [4], a smooth torque is achieved by choosing the suitable position of the flux–barrier ends with the adoption of two different rotor laminations. The combination of two different types of laminations compensates the torque harmonics. In [5], three rotor parameters are analyzed by FEA. The insulation ratio in the d-axes and q-axes of the machine maximizes the torque, while the rotor slot pitch in the d-axis minimizes the torque ripple.
This paper is intended to achieve the suppression of torque ripple by globally optimizing the rotor structure parameters of SynRMs. The global optimization of SynRM parameters has two key steps: the establishment of fast calculation models, and the selection of global optimization algorithms. Thereinto, the research of quick effective modeling method is the core issue of the SynRM structural optimization design. The common methods of motor modeling are magnetic equivalent circuit (MEC) method [6,7], response surface (RS) method [8,9], an artificial neural network (ANN) [10–12], and other methods.
In [6], The conformal mapping technique is utilized to analytically compute the magnetic reluctance of each rotor barrier. The air-gap flux density distribution and the electromagnetic torque estimation are obtained by the MEC model solution. The MEC model can qualitatively reflect the relationship between motor parameters and motor performances, but the model is not accurate enough. In [8], The models under the different rated wattage are established using the RS method. The ratio of total flux barrier width to total iron sheet width and flux barrier numbers and rotor diameters are optimized to obtain the rotor optimum shape for the maximum torque density and minimum torque ripple. The RS method has a fixed experimental design method, which limits the number of sample data and can only approximate the nonlinear relationship of the motor. In [10], Based on the database of the geometry parameters of the squirrel cage bars and settling time obtained by FEA, the ANN model is trained, and the squirrel cage bars is optimized by the Particle Swarm Optimization (PSO). The ANN model has a poor generalization ability. Therefore, the above methods have deficiencies and cannot provide a highly accurate and efficient calculation model for the global optimization of SynRM parameters.
In this paper, the method based on deep neural network (DNN) is presented to optimize the rotor topology of the SynRM. Firstly, six parameters of the rotor to be optimized were determined as input variables. Torque and torque ripple under different current excitation were defined as output variables. In addition, a sample database of the above input variables and output variables was gained through finite element analysis (FEA), which was utilized to establish the DNN model of the SynRM. Then, the proposed SynRM model was optimized to obtain high torque density and low torque ripple using the immune clone algorithm (ICA). Finally, to verify the design effectiveness, the FEA model with the optimal combination of structural parameters was established for comparison with the performance before optimization.
Rotor topology of SynRM
SynRMs are essentially synchronous motors with the reluctance torque component, following the principle that magnetic flux is always closed along the path of least reluctance [13]. The magnetic pulling force generated by the change of reluctance at different rotor positions generates the torque. The rotor lamination is shown in Fig. 1. The SynRM rotor consists of two parts: the air barriers, and the iron segments. The air barrier is the insulation layer inside the SynRM rotor. The magnetic layer inside the SynRM rotor is called iron segment.

SynRM rotor lamination.
This paper takes 22 kW four-pole SynRM as an example to investigate the feasibility of the proposed optimization method. The fixed parameters of the SynRM are shown in Table 1. The SynRM rotor has a complex structure, and a lot of geometrical parameters are involved in the optimization. It is important for reducing the number of geometric parameters to select a rational and general rotor topology. Based on some optimum distribution rules from the analytical anisotropy theory [14], the selected rotor topology (see Fig. 2) is presented. As described in Fig. 2, The relationship between the parameters can be described as follows:
Fixed SynRM design parameters

Proposed rotor geometry and parameter definition for SynRM with four interior barriers.
The K
w (2) is defined as the ratio of the sum of x
i
to l
y. The l
y is the rotor outer radius minus the machine’s shaft radius. The x
i
is the width of the ith barrier on the q-axis, and i (i =1, …, n) is the barrier numbers. The K
𝛼 (3) is the ratio of rotor slot width.
In (3), 𝛼 i is the angle of the ith barrier on the rotor.
In this paper, four-layer air barriers are chosen for the rotor topology to ensure a high rotor saliency ratio [15]. Considering the influence of various parameters on the torque ripple, six parameters selected for optimization are the controller angle 𝛽, the width x i (i =1, 2, 3, 4) of the ith barrier on the q-axis, and the ratio K 𝛼. In order to make the optimal design more reasonable, the design variables restrictions are listed in Table 2. On this basis, the next step of modeling analysis and multi-objective optimization is carried out.
Design variable restrictions
The design of each rotor needs to solve the steady-state instantaneous torque T through 2D-FEA, and then obtain the average torque and torque ripple. The average torque T
avg (4) is defined as the mathematical mean of torque T over one electrical period containing N sample points, and the torque ripple T
rip (5) is the peak-to-peak value with respect to T
avg
In order to simulate operating conditions at different operating points, the SynRM stator windings are excited at 50%, 100% and 200% of the rated current. In addition, the motor adopts the maximum torque per ampere control strategy. This strategy minimizes T rip for a given current level by adjusting the current advance angle.
According to the structural parameter constraints of Table 2, six factors and three levels of the variable table are listed in Table 3. Entire combinations test method is utilized to obtain 729 rotor parameter models. The average torque and torque ripple of all models are acquired through 2D-FEA. Thus, a sample database (see Table 4) of the relationship between SynRM structural parameters and output performance is obtained, and data samples are provided for subsequent DNN modeling. T avg1, T avg0.5, and T avg2 separately represent the average torque at 100%, 50%, and 200% of the rated current; T rip1, T rip0.5, and T rip2 separately represent the torque ripple at 100%, 50%, and 200% of the rated current.
Structure parameter level of SynRM
Sample database of the relationship between SynRM structural parameters and output performance
DNN algorithm structure
The DNN algorithm structure can be divided into visible layers and hidden layers [16]. The visible layers includes an input layer and an output layer. Its basic structure is shown in Fig. 3.
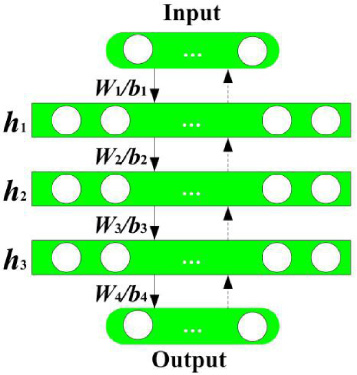
Regression diagram of DNN.
The main steps of DNN regression modeling are as follows: The sample data are randomly divided into 80% training sample data and 20% test sample data. Normalize all data to the [0,1] interval. To make the model from simple linear mapping to efficient modeling of highly nonlinear problems, add activation functions to each layer of the DNN. Select RelU (7) as the activation function. The DNN is initialized layer by layer, and then the error back-propagation algorithm is utilized to train the DNN. In this process, stochastic gradient descent (SGD) is used to update the weight W
i
and the bias b
i
, to achieve the purpose of learning layer by layer and continuously improve the prediction accuracy of the model. The test data to verify the accuracy of the model with the determination coefficient R
2 as the standard. The closer R
2 is to 1, the higher accuracy of the model is.
Respectively establish the DNN models of SynRM under 100%, 50%, and 200% of the rated current. The DNN model under the rated current is created with input, three hidden (Same number of neurons per layer) and output layers, with 6, 6 and 2 neurons for each of the procedures, respectively. The DNN model under 50% of the rated current is created with input, three hidden (Same number of neurons per layer) and output layers, with 6, 18 and 2 neurons for each of the procedures, respectively. The DNN model under 200% of the rated current is created with input, three hidden (Same number of neurons per layer) and output layers, with 6, 12 and 2 neurons for each of the procedures, respectively. The transfer functions of the neurons of layers are ReLU, defined in (7). According to the sample data in Table 4, the rotor parameters 𝛽, x 1, x 2, x 3, x 4, and K 𝛼 are determined as inputs, and the torque and torque ripple are utilized as outputs to build a DNN model of the SynRM. The error back-propagation algorithm is used to train the DNN on 729 groups of data from Table 4. During the training of the DNN, the number of iterations is assumed to be 100000. The 729 groups of data are randomly divided into 80% training sample data and 20% test sample data, that 538 groups of samples are randomly selected for training, and 146 groups are chosen for testing. The training procedure using error back-propagation algorithm is shown in Fig. 4. As shown in the figure, the training procedure has been well done. The R 2 is utilized to verify the accuracy of the model.
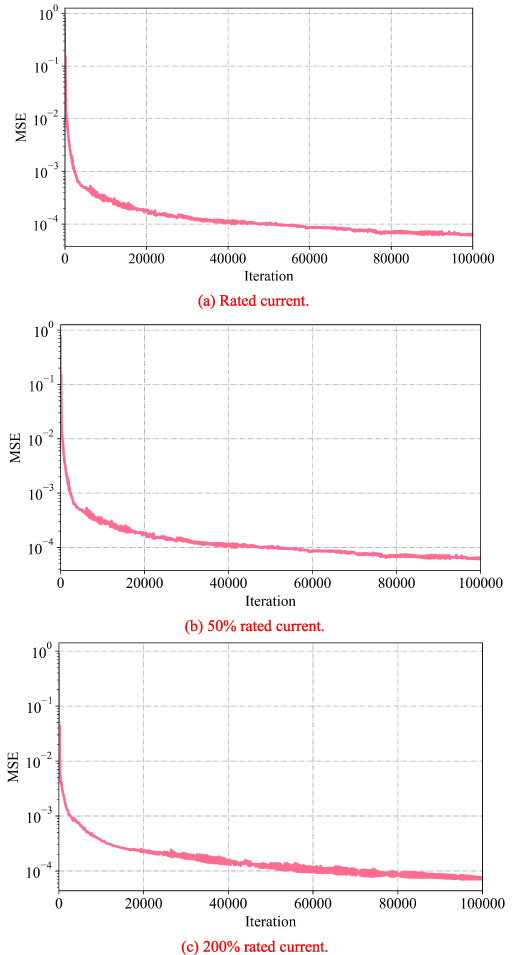
Training procedures of DNN.
Immune clone algorithm
The immune clone algorithm is an intelligent search algorithm that simulates the biological immune mechanism. It has the advantage of strong global search ability and fast convergence to the optimal solution [17]. In this paper, the ICA is utilized for multi-objective optimization of SynRM structural parameters to achieve comprehensive optimization under different working conditions.
The steps of the ICA method to optimize motor structure parameters are as follows:
Firstly, the optimization range of six structural parameters of the motor is listed in Table 2. The population size N
p and the storage unit 0.2N
p are determined. Randomly generate N
p groups of antibodies x
n
, that is, optimization variables (x
1, x
2, x
3, x
4, x
5, x
6). Secondly, the SynRM fast calculation model is used to calculate the affinity F (x) as expressed in (13) and fitness P (11) under the above N
p-group antibodies. The antibody is selected in the descending order of fitness P to record the best contemporary fitness and form the population renewal memory library. Then, antibody populations are performed clonal selection, crossover, and mutation operations. Add memory antibody to produce a new generation of the population. Finally, the generation number plus 1 to determine whether it has reached the Gen generation. If it is satisfied, the optimal antibody is output as the optimized variable (x
1, x
2, x
3, x
4, x
5, x
6). Otherwise, return to step 2.
According to the DNN model, with the T
avg not weakened and T
rip minimized as the optimization goals, a multi-objective optimization function is proposed:
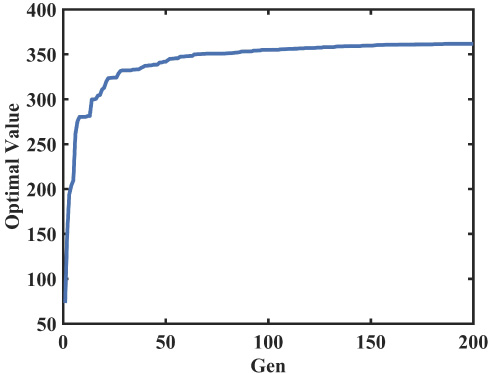
Evolution algebra of ICA.

Fitting results of different current loads.
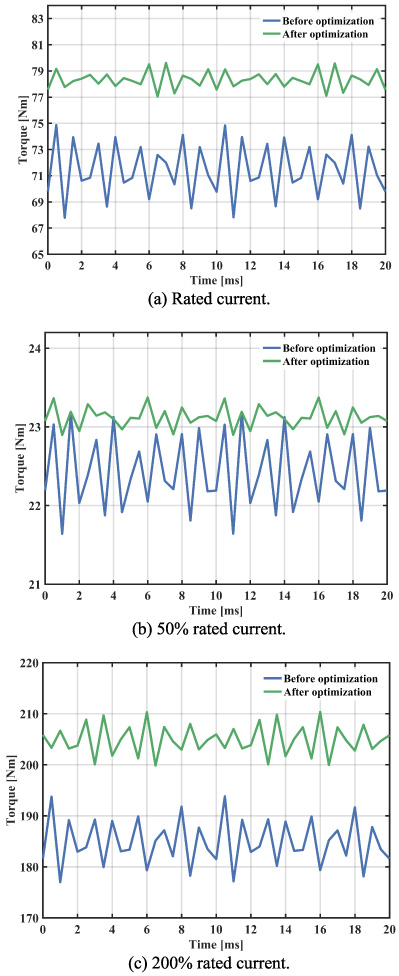
Comparison of torque characteristics before and after optimization with different current loads.
Model accuracy verification
In order to verify the accuracy of the DNN model presented in this paper, the different activation functions are introduced for the comparison. The Sigmoid activation function is selected to compare with the RelU activation function used in this paper. A total of 146 sets of test samples are predicted. The accuracy test of the DNN model is shown in Fig. 6 (only 100 groups are shown in the picture).
Figure 6(a)–(c) respectively shows the regression fitting diagram of the RelU activation function and the Sigmoid activation function for torque and torque ripple test samples under different current loads (100%, 50%, 200%). It can be seen from Fig. 6(a)–(c) that at different current loads, the fitting accuracy of the RelU activation function for torque and torque ripple is higher than that of the Sigmoid activation function. Table 5 shows the fitting results of different activation functions. The determination coefficient R 2 of the RelU activation function under different current loads can achieve 0.95, while the determination coefficient R 2 of the Sigmoid activation function is less than 0.90. Compared with the model using Sigmoid activation function, the model with RelU activation function has fewer neurons in the hidden layer with the identical number of layers, so the operating rate is faster. According to the above analysis results, the DNN model with the RelU activation function has quicker calculating speed and higher accuracy, which can provide an accurate calculation model for subsequent optimization.
Comparison of activation functions
Comparison of activation functions
The DNN model utilizes ICA for the multi-objective optimization. The optimal solution set obtained after multiple iteration experiments is listed in Table 6. In order to verify the above optimization results, the optimized SynRM model was established by FEA. At different current loads, the motor adopts the best current advance angle to minimize the torque ripple. Figure 7(a)–(c) respectively shows the comparison of torque characteristics before and after optimization with different current loads (100%, 50%, 200%).
Optimization results
Optimization results
Before optimization, there is a large torque ripple and the average torque is relatively small. After the optimization, the torque ripple is greatly reduced, and the average torque is also increased. It was shown comparing the optimized result with the former one that the torque ripple has sharply declined, and the optimized motor has excellent adaptability and can meet different load requirements. In order to further study the performance of the optimized motor, the torque and torque ripple are quantitatively analyzed (see Table 7). Table 7 is the simulation before and after optimization average torque and torque ripple with different load currents.
Before and after optimization simulation results
Before optimization, the torque ripple with different current loads is not less than 6.65%. After optimization, the torque ripple with different current loads is less than 5.12%. The optimized torque ripple respectively decreased by 66.9%, 69.0% and 43.8% under different current loads. The optimized torque has increased by 9.6%, 2.9%, and 10.8% under different current loads, respectively. The optimized SynRM torque ripple is significantly reduced, and the torque density is improved. At different operating points, the optimized SynRM can maintain good operating conditions. These results suggest that the method proposed in this paper can effectively optimize the SynRM rotor to reduce torque ripple.
This paper has presented a fast calculation method for the optimization design of the SynRM rotor based on DNN model. On this basis, the global optimization is carried out to obtain the optimal solution of the motor structure parameters and achieve the optimal operation performance of SynRM. The DNN efficient regression modeling method is used to map the relationship between input structure parameters and output performance, and solve the problem of fast calculation model establishment in SynRM design optimization. The R 2 of the DNN calculation model established in this paper is around 0.95, indicating that the DNN model has high accuracy. The ICA is introduced to optimize the DNN model, to obtain the optimal structural parameter combination of the SynRM rotor, and its correctness is verified by FEA. The optimization results show that the torque is improved at least 2.9% and the torque ripple is reduced at least 43.8% at different current loads. This method is of great significance to the optimization design of synchronous motor rotors.
Footnotes
Acknowledgements
This work was supported in part by the National Natural Science Foundations of China under grant nos. 51677051 and 51977055 and Major Science and Technology program of Anhui province under grant 201903a05020042 and in part by the Anhui Wannan Electric Machine Co. Ltd.