
Abstract
This paper focus on a state feedback controller (SFC)-based optimal control scheme for surface-mounted permanent-magnet synchronous motor (SPMSM) with auto-tuning of controller built on seeker optimization algorithm (SOA). First, based on the nonlinear state-space model of SPMSM, voltage feedforward compensation is used to design a linear SFC. Then in order to guarantee the steady performance in speed and current, integral models considering the errors of rotor speed and current response in d-axis are added in the state space model of SPMSM. Furthermore, by statically decoupling the load torque in the state equation, feedforward compensation is implemented on the load torque to improve the dynamic performance of the controller. The load torque is estimated by using disturbance observer with reasonable parameter selection. Then, with the consideration of the search capacity of seeker optimization algorithm (SOA), it is adopted to acquire matrix coefficient of the presented controller. Furthermore, in order to suppress the speed overshoot, a penalty term is introduced to the fitness index. The performance of the proposed method has been validated experimentally and compared with the conventional method under different conditions.
Keywords
Introduction
Due to the inherent advantages of high torque-inertia ratio, high efficiency and excellent control performance, permanent magnet synchronous motor (PMSM) has been widely used in industrial application such as hybrid and electrical vehicles and industrial robots [1–7]. In conventional motor system control, field-oriented control (FOC) strategy is most commonly applied to achieve the dynamic performance of PMSM thanks to its constant switching frequency [8–14].
In the conventional vector control system, cascade control structure is often employed including two cascade proportional-integral (PI) loops. The outermost loop is used for speed control and the inner loops are used for dq-axes current control [15–19]. The classical PI control technique is widely used thanks to its simple implementation and high reliability [20–25]. However, because of the inherent inner loop structure, the dynamic control performance of cascade closed loop structure will be affected for cascade [26–32]. And tuning process in order from inner current loops to outer speed loop needs analysis and experiment. Additionally, in order to guarantee robustness against disturbance and system uncertainties, some nature-inspired optimization algorithms have been employed for the parameters auto-tuning of cascade controllers [33–37]. However, despite the introduction of parameter adjustment algorithms, the existence of inner loop control in the cascade structure has affected the dynamic performance of control system [38–44].
In order to improve the system dynamic property with satisfactory stability, state feedback control strategy is an alternative method for speed control of PMSM drive [45–49]. In SFC structure, only one controller is required, in which all state variables in the control plant can be handled in synchronization [50–58]. Therefore, the cascade structure of speed loop and current loops can be avoided and the drawback of cascade structure is eliminated naturally. In [59], the application of SFC has obtained better dynamic characteristics, especially in disturbance compensation.
However, the process in which SFC parameters are determined is time-consuming and relatively complicated. It is known that the conventional tuning approach of SFC parameters is based on trial-and-error method [60–65]. In [66], a gain-scheduled linear-quadratic (LQR) control system based on linearization of PMSM model has been presented, in which an analytical method is employed for determining elements of weighting matrices. In contrast, some computer-aided optimization techniques have been adopted for the determination of SFC gain coefficients. In [67], a state feedback current controller with an oscillation term is designed for the application of three-phase grid-connected voltage source converter under grid voltage distortion condition, in which a particle swarm optimization (PSO) algorithm is proposed for the offline tuning of the controller with less optimization time. In [68], an optimal control strategy for PMSM drive has been proposed based on state feedback control method with an artificial bee colony (ABC) algorithm and a flower pollination (FP) algorithm, which shows the superiority of coefficients tuning in LQR optimization process.
In this paper, seeker optimization algorithm (SOA) is used for auto-tuning of the controller, which is a new population-based heuristic search algorithm [69–74]. It seeks the optimal solution based on human thinking, so it can simulate human search behaviour to optimize parameters. Because of the properties of high solution precision and fast convergence capability [75–81], SOA is considered as a suitable to solve optimal problems.
In order to achieve speed control of the drive system with error-free in steady state, it is necessary to consider internal models of reference input (i.e., speed reference and d-axis current reference), which are used to establish extended state-space model [82–86]. Moreover, static decoupling from disturbance is used for improvement of the system dynamic performance. In order to estimate the unmeasured disturbance, a sign function-based disturbance observer is proposed and proved to be of asymptotic stability, which is further used to design feedforward load torque compensation for SFC. The specific performance of the disturbance observer is determined by the designed parameters of the observer [87–89].
This paper is organized as follows. Section 2 describes the mathematical model of SPMSM and further develops the linear state-space model in a standard form. In Section 3, discrete SFC is designed for the extended state-space model with introduction of internal models and feedback compensation on load torque. In Section 4, SOA is introduced and analyzed. Auto tuning of SFC based SOA is discussed in Section 5. Experimental results are provided in Section 6. Finally, Section 7 gives the summary and draws the main conclusions of the present study.
Linearization of PMSM model
Assuming that the iron core of the SPMSM is unsaturated and the eddy currents and hysteresis are negligible [90–94], the mathematical model of SPMSM in the synchronous reference frame can be presented by
The flux linkage equation is described as
The typical block diagram of the SPMSM based on field-oriented control scheme is shown in Fig. 1. The scheme adopts the structure of cascade control loops including a speed loop and two current loops [95–99]. Since the dq-axis inductances of SPMSM are equal, limit circles of voltage and current intersect on the 𝛽 axis. Therefore i d = 0 strategy can be adopted to achieve the maximum torque current ratio under no flux-weakening.
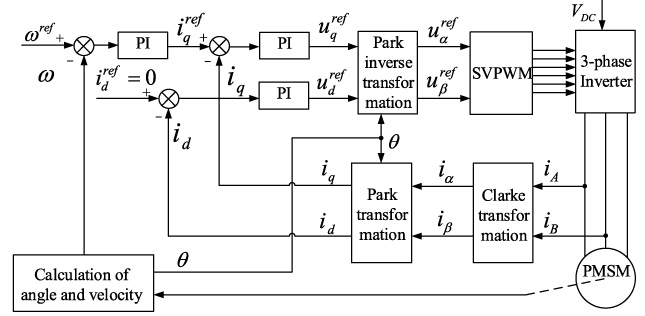
Block diagram of the SPMSM based on field-oriented control scheme under i d = 0 strategy.
The model given above can be written in state-space form in d-q reference frame as follow:
It can be observed that the angular velocity is existed in the first and the second row of matrix
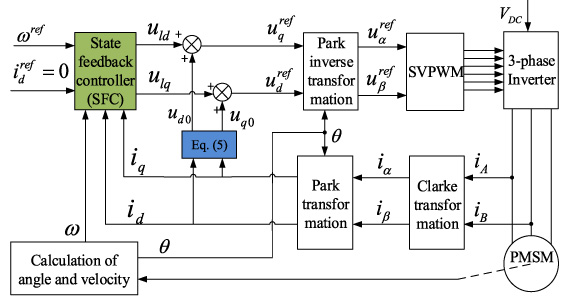
Block diagram of PMSM drive with proposed SFC under i d = 0 strategy.
In order to achieve the linearization of the motor model [106–110], new variables are defined as
It can be seen that the nonlinear and cross-couple terms are eliminated because the right side of the first row of above equation includes only of d-axis variables and the right side of the second row of above equation includes only of q-axis variables [111–116].
Combing (1), (2) and (3), a state-space equation in standardization can be obtained as follows:
Due to the proposed system model is type 0 control system, steady state performance will be affected under step change of reference input. In order to enhance the steady performance of the controller, internal models of reference values are taken into consideration and added into the system model to design a type 1 control system. Thus, integral models considering the errors of rotor speed and current response in d-axis are added in control model.
Therefore the state variable matrix can be extended as follows:
Then the extended state-space equation with the proposed integral models can be obtained as
Ignoring disturbance and assuming that reference signals are equal to zero, the system state equation with full state feedback is described as follows:
Since the motor control model has been extended by the internal models of the reference signals, the control law can be implemented to ensure steady-state error-free operation under step changes in the reference speed and load torque conditions.
After the determination of the feedback controller structure, the gain coefficients of controller need to be simultaneously selected. In the proposed method, a discrete form of SFC will be designed to obtain a form suitable for execution.
In order to enhance the transient control performance of the controller, feedforward compensation is implemented on the load torque. Then the state-space equation is written as
By statically decoupling the load torque in the equation of state, gain matrix
Then state feedback controller is modified as
The block diagram of proposed state feedback controller is illustrated in Fig. 3.
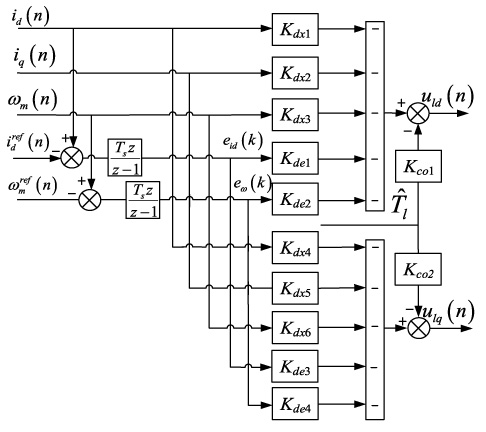
Block diagram of the proposed state feedback controller.
In order to obtain the external load torque, disturbance observer is designed to accurately estimate disturbance. Based on the mechanical Eq. ((2)), the following state equation can be obtained
The disturbance observer is constructed with introduction of sign function as follows:
Combining (17) and (18), error equation is obtained as follows:
Based on the constructed disturbance observer, parameter ζ should be suitably determined to guarantee stability of the observer. The observer is stable if
Substituting (19) in (20) yields
It can be obtained that
When the disturbance observer reaches sliding mode surface, it satisfies that
Therefore, it can be obtained that
Simplifying (20) yields
Solving the differential equation to obtain disturbance estimation as
After determining SFC structure as described above, it is necessary to determine the controller coefficients. Thanks to the characteristics of SFC without cascading structure, all controller coefficients need to be selected simultaneously. which is important for multi-state variable systems. In conventional method for closed loop optimal control, linear quadratic optimization method can be adopted to determine the coefficients by selecting matrices
The discrete performance indicator is described as
The weighting matrices are symmetric positive definite matrices, and the dynamic performance is seriously affected by the value of the weighting matrix. Since it is related to the control signal, the larger value of the matrix
The SOA is based on the research of human random intelligent search behaviour, which can be applied to the search for problem-optimized solutions obtained by seeker population. The total population is randomly divided into three subpopulations, which are searched in several different domains in the search space. The selection the search direction is based on the empirical gradient while the search step is determined by the uncertainty of human search, so as to complete the searcher position update to optimize the problem. In the implement process of the SOA algorithm, search direction and step length 𝛼 ij are calculated independently for each seeker on each variable at each time step.
In SOA, each searcher chooses the search direction according to the empirical gradient by evaluating the current and historical location of him and his neighbours. Empirical gradients involve egotistic behaviours, altruistic behaviours, and active behaviours to generate their own directions. Generally, there are two extreme cooperative behaviours in group dynamics. One selfish person is completely kissing myself, and the other selfless person is completely a family of relatives. Each seeker, as a single senior agent, has a unified self-awareness. He believes that he should move towards the best position in history based on his own judgment. The attitude of the ith searcher can be simulated by the egotistical direction vector
In altruistic behaviour, seekers expect to cooperate explicitly and respond to another seeker in the same neighbourhood to adjust their behaviour to achieve the desired goal. This means that searchers exhibit pro-group behaviour. Therefore, the population exhibits self-organizing aggregation behaviour, and its positive feedback usually takes the form of attraction to a given signal source. The alternative altruistic directions can be modeled as altruistic direction
In addition, seekers do not just respond to the environment, they can make goal-oriented behaviours. Moreover, future behaviours can be predicted and guided by past behaviours. Therefore, the searcher can actively change his search direction according to his past behaviour and exhibit goal-oriented behaviour. Therefore, each searcher is associated with an proactive direction
Aforementioned proactive direction
The direction update of SOA algorithm is determined by altruistic direction, egotistical direction and proactive direction, which is expressed as follows:
The uncertain inference behaviour of SOA adopts fuzzy system to approximate human intelligent search behaviour, so as to build the relationship between step size and objective function. The fuzzy variables of the search step are expressed by Gaussian membership function:
In order to make the membership degree proportional to the order of the function, a linear membership function is used, that is, the maximum membership value u
max = 1, which is in the best position. The worst position corresponds to u
min = 0.0111. In order to introduce variable randomness and improve local search ability, the following formula is introduced as follows:
First, the fitness index needs to be designed for determination of the gain matrix using SOA. Considering the two control objectives of zero d-axis current and zero speed error, the fitness index is designed as follows:
Based on multiple simulations implemented with different penalty term, 𝜂 = 14 is selected which can suppress speed overshoot effectively. Obviously, in the process of parameter tuning, the fitness value will decrease as the iterations increases. At the same time, the variation of fitness value shows the convergence of SOA. As defined by the fitness function, the smaller the speed error and the i d error, the smaller the fitness value, which means better controller performance.
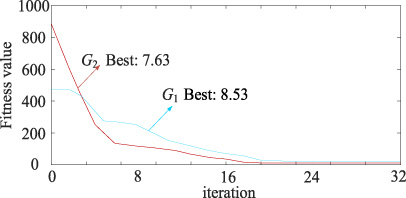
Evolution of G1 and G2 during parameter tuning procedure.
The overall trend of G 1 and G 2 during parameter tuning process with SOA are shown in Fig. 4. It can be observed that, the introduction of penalty term 𝜂 results in rather large initial value of G 2, however the value of G 2 decreases rapidly with increasing iterations. When iterating 16 times, the difference between G2 and G1 becomes very small. After 32 iterations, the fitness indexes corresponding to the two fitness functions are G1 = 8.53 and G2 = 7.63. Figure 5–6 shows the automatic tuning process curve in G1 and G2.
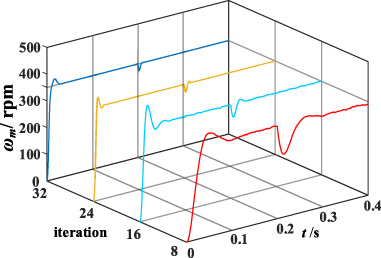
Evolution of speed during parameter tuning process with G1.
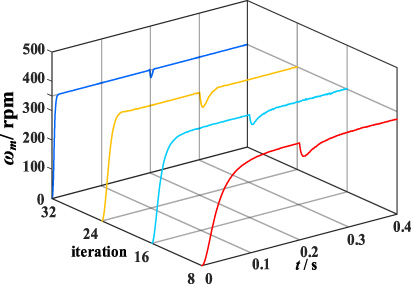
Evolution of speed during parameter tuning process with G2.
The final gain coefficient matrices can be acquired after 32 iterations as follows
It should be noted that the element values of
For the purpose of verifying the effectiveness of the proposed controller, experiments for comparison between the proposed method with different fitness index have been conducted at a laboratory platform.
The experiments are performed on the platform of dSPACE 1401 test bench, through which the experimental measurements can be exported to MATLAB and plotted. The experimental setup includes a SPMSM, a magnetic powder brake and a torque sensor, as shown in Fig. 7. And the SPMSM and system parameters are given in Table 1.
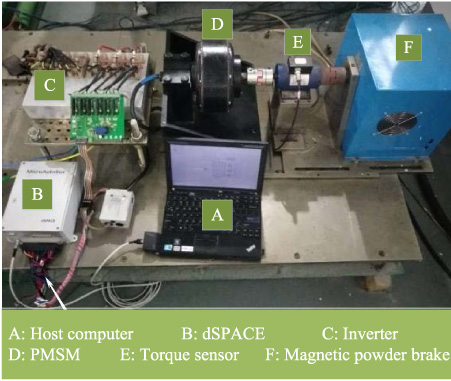
Experimental setup used to verify the purposed SFC method.
SPMSM and system parameters
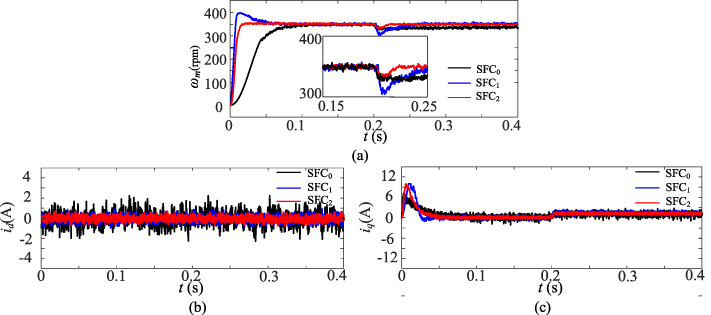
For the comparison of the proposed SFCs, three test cases have been taken into consideration among SFC0 (i.e. conventional state feedback method), SFC1 (i.e. proposed method with index fitness G 1) and SFC2 (i.e. proposed method with index fitness G 2). In all cases, the reference speed is set to 350 rpm. The difference of the three cases is that in case 1, there is no load during operation. In case 2, a step change from 0 to 10 Nm in load torque is applied to the system at 0.2 s. In test case 3, the initial load torque is set as 10 Nm and remove at 0.2 s. The results of speed and current response with different controllers are shown in different conditions.
It can be observed from Fig. 8 that three controllers achieve zero error in stable condition. While different dynamic performances are shown thanks to different choice of weighting matrices. Obviously, SFC0 method fails to track the reference speed exactly in initial 0.1 s, which produces large tracking error. In contrast, SFC1 and SFC2 produce quick response with smaller rising time. Furthermore, with penalty term of speed overshoot in index fitness G 2, SFC2 shows great dynamic tracking performance with smallest speed overshoot. Additionally, SFC1 and SFC2 produce smaller ripples current response due to the error term of d-axis current introduced in index fitness. In Table 2 dynamic performance such as rise time, peak overshoot and settling time, is given under different load conditions.
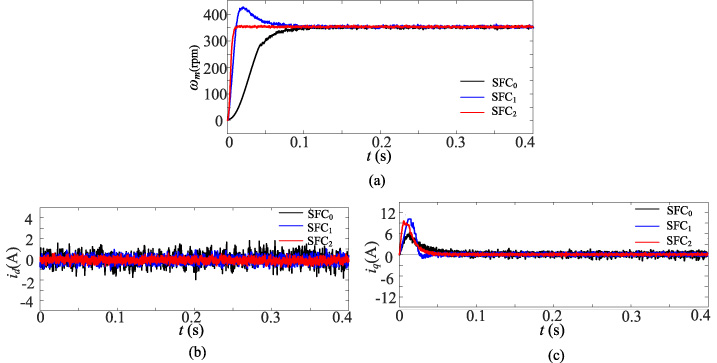
Experimental results under no load condition. (a) Speed, (b) d-axis current response and (c) q-axis current response.
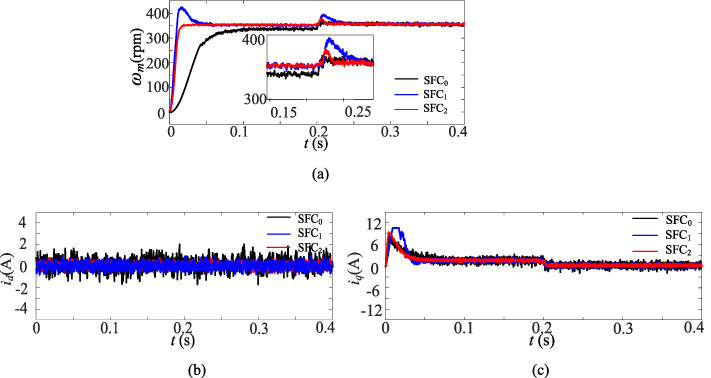
Figures 9–10 show the system response with different controllers under load torque step increase condition and step decrease condition, respectively. When step changes in load torque are applied in system, the speed responses of SFC1 and SFC2 converge to reference value quickly, while SFC1 fails to make the speed response error converge to zero, which is caused by the different weighting matrix
In terms of current response, SFC1 and SFC2 produce smaller oscillation, which can be explained as the greater values in matrix
Dynamic response under different constant load conditions
Experimental results under a step increase in load torque condition. (a) Speed, (b) d-axis current response and (c) q-axis current response.
Figure 11 illustrates the estimated disturbance r based on the proposed disturbance observer, which is used to improve the dynamic performance of the feedback controller. The performance of the disturbance observer can be validated by substituting T l and J m into − T l ∕J m . Consequently, the observed disturbance tracking the real value accurately despite ripples under non-zero load torque due to the introduction of the sign function. The observer not only maintains zero steady-state tracking error, but has rapid dynamic response performance. Meanwhile the ripples of observed value are acceptable and can be further suppressed by substituting sign function with saturation function.
Experimental results under a step decrease in load torque condition. (a) Speed, (b) d-axis current response and (c) q-axis current response.
In addition, Table 3 shows different dynamic performance of different methods in speed variation and transient time in variable load condition. And these performance indicators exhibit the superiority of the proposed method.
Dynamic response under different variable load conditions
In all test conditions, it can be observed that SFC1 and SFC2 track reference speed with smaller steady-state error. Compared with SFC2, the response of SFC1 is slightly faster while there exists a relatively large speed overshoot. However, thanks to the introduction of penalty term in G 2, it allows tracking reference speed almost with no overshoot for SFC2. Furthermore, as shown in Fig. 8(b), Fig. 9(b) and Fig. 10(b), the q-axis current response based on SFC1 reaches the peak, which may deteriorate the controller dynamic performance.
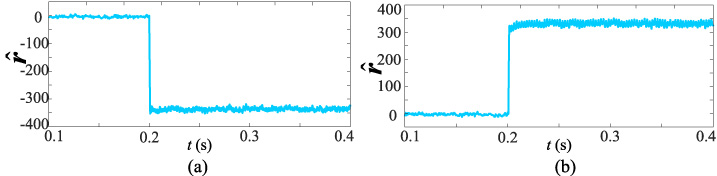
Estimated disturbance based on the proposed disturbance observer. (a) Case 2 condition (b) Case 3 condition.
In this paper, an extended state feedback control method has been proposed for speed control of PMSM drive. In order to ensure satisfactory dynamic performance of the drive system, integral models considering the errors of rotor speed and current response in d-axis has been taken into consideration in linear SFC. Disturbance observer has been designed to estimate load torque for implementation of feedforward compensation on load torque, which improve dynamic performance under variable load condition. With reasonable selection of designed parameter, the disturbance observer shows satisfactory performance. SFC parameters are obtained through auto-tuning of SOA. Furthermore, for the suppression of overshoot in speed and improvement of dynamic performance, a penalty term is introduced in the fitness index. And the experimental results show the superiority in the control performance of the proposed SFC2 compared with SFC1. Detailed analysis to verify the proposed SFC scheme is shown in the experimental results.
Footnotes
Acknowledgements
This work was supported by the National Natural Science Foundation of China under Project 51875261, the Natural Science Foundation of Jiangsu Province of China under Project BK20180046, the “Qinglan project” of Jiangsu Province, and the Postgraduate Research & the Practice Innovation Program of Jiangsu Province under Project SJCX19_0574.