
Abstract
Practical remote vessel detection schemes are switching from the active lidar and sonar based methods to modern passive schemes such as analyzing the geomagnetic anomaly initiated from a moving remote vessel. The detection of a remote vessel and its heading direction has been fully studied in our recently published work through analyzing the two-dimensional frequency spectrum image of the magnetic wake captured by an array of magnetic sensors positioned under the sea surface. Instead of employing the fixed-positioned multi-sensor detection scheme, in this work, we study the heading detection of a remote vessel traveling in shallow/deep water through analyzing the measured magnetic anomaly captured by a single airborne magnetic sensor. After representing mathematical expressions of the captured magnetic wake initiated from the remote vessel, we manage to formulate the Fourier transform of the magnetic wake, and show that the detection of a remote vessel as well as its heading direction can be estimated through detecting the frequency corresponding to the peak amplitude of the spectrum. We show through theoretical and numerical results that the lower the cross-angle between the drone and vessel traveling directions, the more accurate the estimation of the heading angle.
Introduction
Maritime surveillance and controlling the traffic of vessels have always been the incentive for developing remote target detection systems in seas and oceans. Meanwhile, from the time that advanced floating vessels and military submarines have become available, modern detection technologies such as lidar and sonar based schemes have emerged. The main idea behind all such technologies is to distinguish the vessel through the detection of the variation of a measured signal initiated from the moving vessel. This can be achieved in an active manner wherein the measured signal is affected by the reflection of an active signal transmission, or in a passive manner wherein the measured signal initiated from the vessel is distinguished from the natural environmental signal pattern in a passive manner. Among all detection schemes, those with the ability of distinguishing more distant vessels in a passive manner are of great attraction among researchers. The small path loss for acoustic signals in the sea environment in comparison to other types of signals is the key point for the development of sonar-based detection schemes, however, the existence of misleading unwanted acoustic signals as well as intentional deceiving technologies are among the main drawbacks of such schemes, and moreover, the technological advances in manufacturing more acoustic silent vessels has caused sonar-based remote vessel detection methods be less effective as used to be in the past. This, together with the advances in manufacturing highly accurate magnetic sensors have brought about a more modern detection mechanism through processing the measured magnetic anomaly initiated from the remote floating body [1,2]. Maritime target detection methods are generally categorized in two schemes; the first detects the vessel by distinguishing the environment magnetic pattern variation initiated from the magnetic property of the vessel body compared to the natural magnetic field of the earth [3,4]. This method which is called as Magnetic Anomaly Detection (MAD) is rather an old scheme and can only detect vessels having metallic body, and moreover, different degaussing anti-detection mechanisms have been developed and progressed to a great extent in recent years [5,6]. The second method is based upon detecting the magnetic anomaly resulted from the hydrodynamic wakes. In this method, the moving vessel produces kind of hydrodynamic anomalies called as hydrodynamic wake [7–9]. The hydrodynamic wake has two regimes of near and far field; the later called as Kelvin waves is involved in the detection of the remote vessel [8,9]. The movement of water as a weak conductor in the natural magnetic field of the earth induces magnetic anomaly whose behavior is very similar to the original hydrodynamic Kelvin waves [8] and thus can lead to the detection of the remote vessel if precisely measured and processed [10]. The major feature of the magnetic anomaly induced by the moving vessel is that it lasts for long time and can be sensed at large distances which makes it a good tool as a passive remote detection method in seas and oceans [11–14]. On the other hand, the detection of the aforementioned magnetic anomaly does not depend on the ship body material, and provides the feasibility of detecting remote vessels equipped with degaussing tools or having non-metallic body material.
Till now, there have been many research studies on the study of the magnetic wake in deep water, and its relation to environmental parameters as well as the physical specifications of the vessel [15,21]. While the study of far field magnetic anomaly in shallow water has been less considered compared to that of deep water, several works have conducted this including [22,27]. Relating theoretical calculations have been conducted for a Havelock point source [20,22] or slender body [23] for both near and far field, however, to the best of our knowledge, no work has considered the effect of the general physical shape of the vessel. Due to the very small amplitude of the magnetic wake at long distances from the vessel, various methods have been proposed in order to detect a remote vessel. In [14,25], the implementation of airborne magnetic transducer measuring the magnetic wake has been considered. As another approach, the implementation of a linear array of magnetic sensors has been presented in [26,27]. In this method, the sensor array is installed on the water surface and a signal processing scheme is proposed in order to increase the detection range.
In this paper, we focus on the study of far field wake in water of finite depth. At first, we express the magnetic wake pattern formulations in finite depth water initiated from a moving vessel, and analyze its variation as a function of the distance from the vessel. We include the physical shape parameters of the vessel in the presented mathematical expressions, and thus our derived results are not limited to slender body theory. Similar to [25,27], we analyze the frequency spectrum of the magnetic wake, and show that the magnetic anomaly initiated from the moving vessel can be distinguished from the background geomagnetic noise by exploring the frequency spectrum of the measured signal.
In our recent previous work [15], we proposed a processing scheme wherein a two-dimensional image of the magnetic wake was formed through an array of magnetic sensors positioned under the sea surface, and then the existence of the remote vessel as well as its heading direction was detected through analyzing the spectrum and the two-dimensional image of the magnetic wake. In practice however, the fixed positions of the magnetic sensors might limit the detection coverage area, and hence a more dynamic scheme with higher coverage zone is to employ airborne magnetic sensor conveyed through a flying drone. In practice however, scanning the two-dimensional image of the magnetic wake requires a nonlinear two-dimensional pattern for the flying track of the drone which is generally time-consuming leading to the none-real-time detection of the remote vessel, and therefore, it would be of great interest in practice if the vessel heading detection through two-dimensional magnetic wake image scan can be replaced with the fast low-complexity one-dimensional one. Therefore, in this paper we investigate the feasibility of detecting the heading of a floating/submerged vessel in shallow water, from the one-dimensional scan of the magnetic wake through a single airborne magnetic sensor conveyed through a drone flying in a straight line.
First we present the geomagnetic anomaly relations resulted from the motion of the vessel in a shallow sea water such as Persian Gulf and investigate the relation of the magnetic wake to the distance of the moving vessel, and then we present the corresponding frequency spectrum formulation of the magnetic wake. We show that the frequency spectrum of the wake can be efficiently distinguished from the spectrum of the background geomagnetic noise which leads to the detection of the remote vessel. We will show through theoretical formulations that frequencies corresponding to the peak amplitudes of the magnetic wake are nonlinearly related to the vessel heading which can serve as a good tool to detect the direction of the vessel heading. Finally, we setup a simulation scenario wherein a drone scans and captures the one-dimensional magnetic wake samples contaminated by geomagnetic background noise, and then through employing the proposed frequency spectrum analysis, the existence of a remote vessel and its heading direction is detected with high accuracy.
Hydrodynamic wake formulation
The movement of a floating/submerged body in fluid results in the generation of near-field and far-field regimes; the latter known as Kelvin waves is the one which can be utilized in the detection process of the remote target. The potential function of a fluid motion resulted from the movement of a body with constant velocity V corresponding to the wave front angle θ with respect to x axis is given by [9]:
Consider a vessel traveling in a fluid of flat surface according to Fig. 1 wherein the surface corresponds to the z = 0 plane in the Cartesian coordinate system. The positive and negative values of z correspond respectively to the air and water. The natural geomagnetic field of the earth denoted by

The system model for remote vessel detection scheme wherein the cross-angle between the vessel heading and drone heading is denoted by 𝛼.
In order to solve (6), we should note that the harmonic nature of 𝜓 in (1) leads to the harmonic behavior of
We consider a detection scenario according to Fig. 1 wherein magnetic sensor is mounted on a drone positioned at time t
0 at point (x
0, y
0, z
0) where z
0 is the altitude of the drone. The drone travels at constant velocity V
s
with the angle 𝛼 toward the x axis. The instantaneous location of the sensor is then formulated as follows:
Measure the magnetic wake samples h[n] through the airborne magnetic sensor with sampling frequency f
s
. Obtain the Discrete-Time Fourier Transform of h[n] denoted by H (e
jω) and determine the first two frequencies ω01 and ω02 corresponding to the peak amplitudes of H (e
jω) and let Ω
01 = f
s
ω01 and Ω
02 = f
s
ω02. Determine the vessel heading angle 𝛼 by solving the set of equations (19).
All mathematical formulations as well as the proposed heading detection scheme are presented for the general case of finite-depth water of depth h, however, it is clear that they can be applied to the deep water as well by considering h → ∞. This can be validated by comparing the expressed equations to the corresponding ones represented for the deep water expressed in [10].
In this section, we present numerical results for the detection of a remote vessel together with distinguishing its heading direction analyzing the frequency domain of the magnetic anomaly captured through a traveling drone in the scenario described in the previous section. The water column depth is 2000 m, and the drone is assumed to travel at the speed of 100 m/s and at the height of 30 m. The angle between the vessel heading and drone heading is 𝛼. We consider a ship whose velocity is 10 m/s and its shape is formulized as follows:
First, we investigate how the values of the poles Ω 0 = 2πf 0 and Ω 02 = 2πf 02 are related to the heading angle 𝛼. Figure 2 depicts the peak frequencies f 01 and f 02 versus different values of 𝛼. First of all it is seen that the detection of the heading angle is only possible for the case where 𝛼 < sin−1(1∕3) ≈ 19.5° for which there exists distinct values of θ+ and θ− corresponding to the roots of G d (θ) = 0. This can theoretically be verified from (19). On the other hand, the value of the second peak frequency f 02 is shown not be a function of 𝛼, however, it is seen that the first peak frequency f 01 is directly related to 𝛼 in the sense that the more the absolute value of 𝛼 tends to zero, the higher the value of f 01. In other words, the more 𝛼 is close to zero, higher peak amplitude corresponding to frequency f 01 is detected leading to more exact estimation of 𝛼 in the presence of background noise.
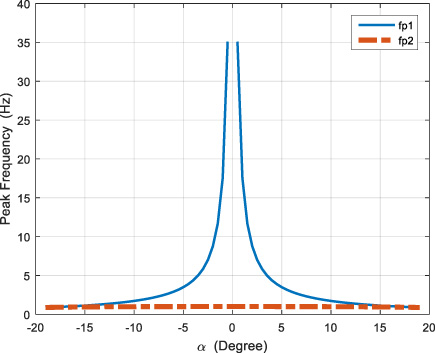
Relation of the peak frequencies f 01 and f 02 to the heading angle 𝛼.
Now we explore the time and frequency domain behavior of the magnetic wake initiated from the moving vessel which is measured by the airborne sensor. Figure 3 shows the general picture of a single snapshot two-dimensional time-domain magnetic wake in an area of 800 × 1000 m2 at z 0 = 30 m corresponding to the height of the flying drone.

Illustration of the magnetic wake for B z at z 0 = 30 in an area of a region of 800 × 1000 m2.
By considering that the aircraft is flying at the cross-angle 𝛼 = 5° relative to the wavefront direction, the corresponding one-dimensional amplitude of the magnetic wake pattern is depicted as Fig. 4.

The one-dimensional magnitude of the measured magnetic wake component B z .

Comparison of the spectrum of the captured magnetic anomaly for two values of the cross-angle 𝛼 = 5° and 𝛼 = 10° (V = 10 m/s, SNR = 2 dB).
It is seen from Fig. 4 that the amplitude of the magnetic wake is about 0.6 nT and 0.3 nT for x = 300 m and x = 1300 m respectively; in other words, by increasing the distance more than 4 times from 300 m to 1300 m, the wake is only decreased to half, which shows that the magnetic wake lasts for long distances and thus is a good means to be employed in the detection of remote vessels.
From (15) we expect
In order to investigate how different values of the SNR affect the performance of the proposed vessel heading detection scheme, we have considered three different values of the SNR

Comparison of the heading detection probability versus 𝛼 for different values of the SNR.
The detection of the heading of a remote floating/submerged vessel in shallow water through measuring and processing of the magnetic anomaly captured through an airborne magnetometer was studied. After representing mathematical expressions of the captured magnetic wake initiated from the remote vessel, we managed to formulate the Fourier transform of the magnetic wake, and showed that the detection of the heading of vessel as well as the existence of remote vessel can be estimated through measuring the peak frequency of the spectrum. Numerical results showed that the heading detection can be estimated more accurately for smaller values of the cross-angle between the vessel heading and the wake wavefront.